Preliminary Assessment of Turbidity and Chlorophyll Impact on Bathymetry Derived from Sentinel-2A and Sentinel-3A Satellites in South Florida


Abstract
:
1. Introduction
2. Materials and Methods
2.1. Study Region
2.2. Satellite Data: Sentinel-2 and Sentinel-3 Missions
2.3. Airborne Lidar Bathymetry and Electronic Navigational Charts
2.4. Satellite-Derived Bathymetry Estimation
3. Results
3.1. Validation of Satellite-Derived-Bathymetry from Sentinel-2A
3.2. Comparison of Sentinel-3 and Sentinel-2 Products
3.3. Inspection of Turbidity Impact on Satellite-Derived Bathymetry
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- International Hydrographic Review, November 2017. Report by Ian HALLS, Editor. Available online: https://www.iho.int/mtg_docs/IHReview/2017/IHR_November2017.pdf (accessed on 16 March 2019).
- International Hydrographic Publication C-55 Status of Hydrographic Surveying and Charting Worldwide. 19 October 2018. Available online: https://www.iho.int/mtg_docs/misc_docs/basic_docs/IHO_Work_Programme_for_2019_final.pdf (accessed on 16 March 2019).
- Dierssen, H.M.; Thenberge, A.E., Jr. Bathymetry: Assessing Methods. Available online: https://www.researchgate.net/profile/Heidi_Dierssen/publication/281410376_Bathymetry_Assessing_Methods/links/55e5fd7b08aecb1a7ccd625e.pdf (accessed on 16 March 2019).
- Gao, J. Bathymetric mapping by means of remote sensing: Methods, accuracy and limitations. Prog. Phys. Geogr. 2009, 33, 103–116. [Google Scholar] [CrossRef]
- Dekker, A.G.; Phinn, S.R.; Anstee, J.; Bissett, P.; Brando, V.E.; Casey, B.; Fearns, P.R.; Hedley, J.; Klonowski, W.M.; Lynch, M.; et al. Intercomparison of shallow water bathymetry, hydro-optics, and benthos mapping techniques in Australian and Caribbean coastal environments. Limnol. Oceanogr. Methods 2011, 9, 396–425. [Google Scholar] [CrossRef] [Green Version]
- Lyzenga, D.R. Shallow-water bathymetry using combined lidar and passive multispectral scanner data. Int. J. Remote Sens. 1985, 6, 115–125. [Google Scholar] [CrossRef]
- Philpot, W.D. Bathymetric mapping with passive multispectral imagery. Appl. Opt. 1989, 28, 1569–1578. [Google Scholar] [CrossRef] [PubMed]
- Stumpf, R.P.; Holderied, K.; Sinclair, M. Determination of water depth with high-resolution satellite imagery over variable bottom types. Limnol. Oceanogr. 2003, 48, 547–556. [Google Scholar] [CrossRef] [Green Version]
- Lee, Z.; Carder, K.L.; Mobley, C.D.; Steward, R.G.; Patch, J.S. Hyperspectral remote sensing for shallow waters: 2. Deriving bottom depths and water properties by optimization. Appl. Opt. 1999, 38, 3831–3843. [Google Scholar] [CrossRef] [PubMed]
- Lee, Z.; Casey, B.; Arnone, R.A.; Weidemann, A.D.; Parsons, R.; Montes, M.J.; Gao, B.-C.; Goode, W.; Davis, C.; Dye, J. Water and bottom properties of a coastal environment derived from Hyperion data measured from the EO-1 spacecraft platform. J. Appl. Remote Sens. 2007, 1, 011502. [Google Scholar] [CrossRef] [Green Version]
- Hedley, J.D.; Roelfsema, C.; Brando, V.; Giardino, C.; Kutser, T.; Phinn, S.; Mumby, P.J.; Koetz, B. Coral reef applications of Sentinel-2: Coverage, characteristics, bathymetry and benthic mapping with comparison to Landsat 8. Remote Sens. Environ. 2018, 216, 598–614. [Google Scholar] [CrossRef]
- IOCCG. Remote Sensing of Ocean Colour in Coastal, and Other Optically-Complex, Waters; IOCCG: Dartmouth, NS, Canada, 2000. [Google Scholar]
- IOCCG. Atmospheric Correction for Remotely-Sensed Ocean-Colour Products; Reports of the International Ocean-Colour Coordinating Group, No. 10, IOCCG, edited by M. Wang, 78; IOCCG: Dartmouth, NS, Canada, 2010. [Google Scholar] [CrossRef]
- Linklater, M.; Hamylton, S.M.; Brooke, B.P.; Nichol, S.L.; Jordan, A.R.; Woodroffe, C.D. Development of a seamless, high-resolution bathymetric model to compare reef morphology around the subtropical island shelves of Lord Howe Island and Balls Pyramid, southwest Pacific Ocean. Geosciences 2018, 8, 11. [Google Scholar] [CrossRef]
- Lafon, V.; Froidefond, J.M.; Lahet, F.; Castaing, P. SPOT shallow water bathymetry of a moderately turbid tidal inlet based on field measurements. Remote Sens. Environ. 2002, 81, 136–148. [Google Scholar] [CrossRef]
- Tripathi, N.K.; Rao, A.M. Bathymetric mapping in Kakinada Bay, India, using IRS-1D LISS-III data. Int. J. Remote Sens. 2002, 23, 1013–1025. [Google Scholar] [CrossRef]
- Legleiter, C.J.; Kinzel, P.J.; Overstreet, B.T. Evaluating the potential for remote bathymetric mapping of a turbid, sand-bed river: 1. Field spectroscopy and radiative transfer modeling. Water Resour. Res. 2011, 47. [Google Scholar] [CrossRef] [Green Version]
- Bramante, J.F.; Raju, D.K.; Sin, T.M. Multispectral derivation of bathymetry in Singapore’s shallow, turbid waters. Int. J. Remote Sens. 2013, 34, 2070–2088. [Google Scholar] [CrossRef]
- Pe’eri, S.; Parrish, C.; Azuike, C.; Alexander, L.; Armstrong, A. Satellite remote sensing as a reconnaissance tool for assessing nautical chart adequacy and completeness. Mar. Geod. 2014, 37, 293–314. [Google Scholar] [CrossRef]
- Favoretto, F.; Morel, Y.; Waddington, A.; Lopez-Calderon, J.; Cadena-Roa, M.; Blanco-Jarvio, A. 4SM Method Tested in the Gulf of California Suggests Field Data are Not Needed to Derive Satellite Bathymetry. Sensors 2017, 17, 2248. [Google Scholar] [CrossRef]
- Robinson, J.A.; Feldman, G.C.; Kuring, N.; Franz, B.; Green, E.; Noordeloos, M.; Stumpf, R.P. Data fusion in coral reef mapping: Working at multiple scales with SeaWiFS and astronaut photography. In Proceedings of the 6th International Conference on Remote Sensing for Marine and Coastal Environments, Charleston, SC, USA, 1–3 May 2000; Volume 2, pp. 473–483. [Google Scholar]
- Brando, V.E.; Anstee, J.M.; Wettle, M.; Dekker, A.G.; Phinn, S.R.; Roelfsema, C. A physics based retrieval and quality assessment of bathymetry from suboptimal hyperspectral data. Remote Sens. Environ. 2009, 113, 755–770. [Google Scholar] [CrossRef]
- Kutser, T.; Paavel, B.; Verpoorter, C.; Ligi, M.; Soomets, T.; Toming, K.; Casal, G. Remote sensing of black lakes and using 810 nm reflectance peak for retrieving water quality parameters of optically complex waters. Remote Sens. 2016, 8, 497. [Google Scholar] [CrossRef]
- Toming, K.; Kutser, T.; Laas, A.; Sepp, M.; Paavel, B.; Nõges, T. First experiences in mapping lake water quality parameters with Sentinel-2 MSI imagery. Remote Sens. 2016, 8, 640. [Google Scholar] [CrossRef]
- Vanhellemont, Q.; Ruddick, K. Acolite for Sentinel-2: Aquatic applications of MSI imagery. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Martins, V.S.; Barbosa, C.C.F.; de Carvalho, L.A.S.; Jorge, D.S.F.; Lobo, F.D.L.; Novo, E.M.L.D.M. Assessment of Atmospheric Correction Methods for Sentinel-2 MSI Images Applied to Amazon Floodplain Lakes. Remote Sens. 2017, 9, 322. [Google Scholar] [CrossRef]
- Ruddick, K.; Vanhellemont, Q.; Dogliotti, A.; Nechad, B.; Pringle, N.; Van der Zande, D. New opportunities and challenges for high resolution remote sensing of water colour. In Proceedings of the Ocean Optics 2016, Victoria, CB, Canada, 2 October 2016. [Google Scholar]
- Pahlevan, N.; Schott, J.R.; Franz, B.A.; Zibordi, G.; Markham, B.; Bailey, S.; Schaafe, C.B.; Ondrusek, M.; Greb, S.; Strait, C.M. Landsat 8 remote sensing reflectance (Rrs) products: Evaluations, intercomparisons, and enhancements. Remote Sens. Environ. 2017, 190, 289–301. [Google Scholar] [CrossRef]
- Pahlevan, N.; Sarkar, S.; Franz, B.A.; Balasubramanian, S.V.; He, J. Sentinel-2 MultiSpectral Instrument (MSI) data processing for aquatic science applications: Demonstrations and validations. Remote Sens. Environ. 2017, 201, 47–56. [Google Scholar] [CrossRef]
- Chybicki, A. Mapping South Baltic Near-Shore Bathymetry Using Sentinel-2 Observations. Pol. Marit. Res. 2017, 24, 15–25. [Google Scholar] [CrossRef] [Green Version]
- Kabiri, K. Discovering optimum method to extract depth information for nearshore coastal waters from Sentinel-2A imagery-case study: Nayband Bay, Ian. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences XLII-4/W4, 42, Tehran’s Joint ISPRS Conferences of GI Research, SMPR and EOEC 2017, Tehran, Iran, 7–10 October 2017. [Google Scholar]
- Traganos, D.; Reinartz, P. Mapping Mediterranean seagrasses with Sentinel-2 imagery. Mar. Pollut. Bull. 2017, 134, 197–209. [Google Scholar] [CrossRef]
- Casal, G.; Monteys, X.; Hedley, J.; Harris, P.; Cahalane, C.; McCarthy, T. Assessment of empirical algorithms for bathymetry extraction using Sentinel-2 data. Int. J. Remote Sens. 2018, 1–25. [Google Scholar] [CrossRef]
- European Commission. Copernicus for Coastal Zone Monitoring and Management Workshop; Technical Report; Copernicus Support Office: Brussels, Belgium, 2017.
- Traganos, D.; Poursanidis, D.; Aggarwal, B.; Chrysoulakis, N.; Reinartz, P. Estimating satellite-derived bathymetry (SDB) with the google earth engine and sentinel-2. Remote Sens. 2018, 10, 859. [Google Scholar] [CrossRef]
- Halls, J.; Costin, K. Submerged and Emergent Land Cover and Bathymetric Mapping of Estuarine Habitats Using WorldView-2 and LiDAR Imagery. Remote Sens. 2016, 8, 718. [Google Scholar] [CrossRef]
- Islam, S.; Hasan, Z.; Islam, A. The Challenges of River Bathymetry Survey Using Space Borne Remote Sensing in Bangladesh. Atmos. Ocean. Sci. 2016, 1, 7–13. [Google Scholar] [CrossRef]
- Kabiri, K. Accuracy assessment of near-shore bathymetry information retrieved from Landsat-8 imagery. Earth Sci. Inform. 2017, 10, 235–245. [Google Scholar] [CrossRef]
- Hamylton, S.M.; Hedley, J.D.; Beaman, R.J. Derivation of high-resolution bathymetry from multispectral satellite imagery: A comparison of empirical and optimisation methods through geographical error analysis. Remote Sens. 2015, 7, 16257–16273. [Google Scholar] [CrossRef]
- Jones, R.; Boyer, J.N. Florida Keys National Marine Sanctuary Water Quality Monitoring Project: 1998 Annual Report; Florida International University: Miami, FL, USA, 1988. [Google Scholar]
- Lapointe, B.E.; Clark, M. Nutrient inputs from the watershed and coastal eutrophication in the Florida Keys. Estuar. Coasts 1992, 15, 465–476. [Google Scholar] [CrossRef]
- Barnes, B.B.; Hu, C. A hybrid cloud detection algorithm to improve MODIS sea surface temperature data quality and coverage over the Eastern Gulf of Mexico. IEEE Trans. Geosci. Remote Sens. 2013, 51, 3273–3285. [Google Scholar] [CrossRef]
- Fourqurean, J.W.; Zieman, J.C.; Powell, G.V. Phosphorus limitation of primary production in Florida Bay: Evidence from C: N: P ratios of the dominant seagrass Thalassia testudinum. Limnol. Oceanogr. 1992, 37, 162–171. [Google Scholar] [CrossRef]
- Finkl, C.W.; Benson, R.; Yuhr, L. Demonstration of Feasibility of Using the “Geomorphic Site Selection Software Tool” by Comparison to Known Conditions along the Southeast Florida Coast; Technos, Inc.: Holland, MI, USA, 1997; Task 4 Report for Naval Facilities Engineering Command, Port Hueneme, California (Contract No. N47408-96-C-7226, Line No. 001AD). [Google Scholar]
- Finkl, C.W.; Warner, M.T. Morphologic features and morphodynamic zones along the inner continental shelf of southeastern Florida: An example of form and process controlled by lithology. J. Coast. Res. 2005, 42, 79–96. [Google Scholar]
- European Space Agency. Sentinel-3 OLCI Technical Guide. Available online: https://sentinel.esa.int/web/sentinel/user-guides/sentinel-3-olci (accessed on 30 May 2018).
- O’Reilly, J.E.; Maritorena, S.; Siegel, D.A.; O’Brien, M.C.; Toole, D.; Mitchell, B.G.; Kahru, M.; Chavez, F.; Strutton, P.G.; Cota, G.F.; et al. Ocean color chlorophyll a algorithms for SeaWiFS, OC2, and OC4: Version 4. SeaWiFS post launch calibration and validation analyses; Goddard Space Flight Center: Greenbelt, MD, USA, 2000; Part 3; pp. 9–23.
- Werdell, P.J.; Bailey, S.W. An improved bio-optical data set for ocean color algorithm development and satellite data product validation. Remote Sens. Environ. 2005, 98, 122–140. [Google Scholar] [CrossRef]
- European Space Agency. Sentinel-2 User Handbook; ESA Standard Document 2015; European Space Agency: Paris, France, 2015. [Google Scholar]
- Vanhellemont, Q.; Ruddick, K. Turbid wakes associated with offshore wind turbines observed with Landsat 8. Remote Sens. Environ. 2014, 145, 105–115. [Google Scholar] [CrossRef] [Green Version]
- Vanhellemont, Q.; Ruddick, K. Advantages of high quality SWIR bands for ocean colour processing: Examples from Landsat-8. Remote Sens. Environ. 2015, 161, 89–106. [Google Scholar] [CrossRef] [Green Version]
- Belkin, I.M.; O’Reilly, J.E. An algorithm for oceanic front detection in chlorophyll and SST satellite imagery. J. Mar. Syst. 2009, 78, 319–326. [Google Scholar] [CrossRef]
- Hu, C.; Chen, Z.; Clayton, T.D.; Swarzenski, P.; Brock, J.C.; Muller-Karger, F.E. Assessment of estuarine water-quality indicators using MODIS medium-resolution bands: Initial results from Tampa Bay, FL. Remote Sens. Environ. 2004, 93, 423–441. [Google Scholar] [CrossRef]
- Chen, Z.; Hu, C.; Muller-Karger, F. Monitoring turbidity in Tampa Bay using MODIS/Aqua 250-m imagery. Remote Sens. Environ. 2007, 109, 207–220. [Google Scholar] [CrossRef]
- Liu, H.; Li, Q.; Shi, T.; Hu, S.; Wu, G.; Zhou, Q. Application of sentinel 2 MSI images to retrieve suspended particulate matter concentrations in Poyang Lake. Remote Sens. 2017, 9, 761. [Google Scholar] [CrossRef]
- Drusch, M.; Gascon, F.; Berger, M. GMES Sentinel-2 Mission Requirements Document; ESA: Frascati, Italy, 2010; EOP-SM1163MR-Dr242. [Google Scholar]
- Seegers, B.N.; Stumpf, R.P.; Schaeffer, B.A.; Loftin, K.A.; Werdell, P.J. Performance metrics for the assessment of satellite data products: An ocean color case study. Opt. Express 2018, 26, 7404–7422. [Google Scholar] [CrossRef] [PubMed]
- Minghelli-Roman, A.; Dupouy, C. Influence of water column chlorophyll concentration on bathymetric estimations in the lagoon of New Caledonia, using several MERIS images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 739–745. [Google Scholar] [CrossRef]
- Stumpf, R.P.; Feldman, G.; Kuring, N.; Franz, B.; Green, E.; Robinson, J. SeaWiFS spies reefs. Reef Encount. 1999, 26, 29–30. [Google Scholar]
- Beck, M.W.; Losada, I.J.; Menéndez, P.; Reguero, B.G.; Díaz-Simal, P.; Fernández, F. The global flood protection savings provided by coral reefs. Nat. Commun. 2018, 9, 2186. [Google Scholar] [CrossRef] [PubMed]
- Saylam, K.; Brown, R.A.; Hupp, J.R. Assessment of depth and turbidity with airborne Lidar bathymetry and multiband satellite imagery in shallow water bodies of the Alaskan North Slope. Int. J. Appl. Earth Obs. Geoinf. 2017, 58, 191–200. [Google Scholar] [CrossRef]
- Tomlinson, M.C.; Stumpf, R.P.; Vogel, R.L. Approximation of diffuse attenuation, Kd, for MODIS high-resolution bands. Remote Sens. Lett. 2019, 10, 178–185. [Google Scholar] [CrossRef]
- Forfinski-Sarkozi, N.A.; Parrish, C.E. Analysis of MABEL Bathymetry in Keweenaw Bay and Implications for ICESat-2 ATLAS. Remote Sens. 2016, 8, 772. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sentinel-2A (MSI) | Sentinel-3A (OLCI) | ||||
|---|---|---|---|---|---|
| Central Wavelength (nm) | Spatial Resolution (m) | Bandwidth (nm) | Central Wavelength (nm) | Spatial Resolution (m) | Bandwidth (nm) |
| 445 | 60 | 20 | 443 | 300 | 10 |
| 490 | 10 | 65 | 490 | 300 | 10 |
| 560 | 10 | 35 | 560 | 300 | 10 |
| 664 | 10 | 30 | 665 | 300 | 10 |
| 704 | 20 | 15 | 709 | 300 | 10 |
| 740 | 20 | 15 | 754 | 300 | 7.5 |
| 783 | 20 | 20 | 779 | 300 | 15 |
| 865 | 20 | 20 | 865 | 300 | 20 |
| Number Image | Date Acquisition | Sensing Time (GMT) | Tile | Cloud Coverage (%) |
|---|---|---|---|---|
| 1 | 20151216 | 16:19 | T17RMH | 0 |
| 2 | 20160214 | 16:11 | T17RMH | 0.15 |
| 3 | 20160822 | 16:13 | T17RMH | 1.69 |
| 4 | 20161001 | 16:04 | T17RMH | 9.39 |
| 5 | 20161021 | 16:13 | T17RMH | 0 |
| 6 | 20161110 | 16:08 | T17RMH | 0.61 |
| 7 | 20161120 | 16:13 | T17RMH | 0.33 |
| 8 | 20161130 | 16:13 | T17RMH | 26.18 |
| 9 | 20161220 | 16:06 | T17RMH | 1.04 |
| 10 | 20161230 | 16:12 | T17RMH | 0.56 |
| 11 | 20170208 | 16:12 | T17RMH | 0.28 |
| 12 | 20170419 | 16:13 | T17RMH | 24.9 |
| 13 | 20170509 | 16:13 | T17RMH | 15.9 |
| 14 | 20170529 | 16:13 | T17RMH | 21.63 |
| 15 | 20160302 | 15:56 | T17RNK | 9.95 |
| 16 | 20161127 | 16:05 | T17RNK | 0.56 |
| 17 | 20161207 | 16:05 | T17RNK | 7.1 |
| 18 | 20170106 | 16:00 | T17RNK | 0 |
| Band (nm) | aw (1/m) | Max Light Return 1 m | Max Light Return 2 m | Max Light Return 3 m | Max Light Return 4 m |
|---|---|---|---|---|---|
| 704 | 0.687 | 0.1265 | 0.032 | 0.0081 | 0.0021 |
| 709 | 0.7962 | 0.102 | 0.0207 | 0.0042 | 0.00085 |
| 740 | 2.768 | 0.0020 | 7.810–6 | 3.110–8 | 1.210–10 |
| 754 | 2.8666 | 0.0016 | 5.310–6 | 1.710–8 | 5.510–11 |
| 779 | 2.7101 | 0.0022 | 9.810–6 | 4.410–8 | 1.910–10 |
| 783 | 2.632 | 0.0026 | 1.410–5 | 6.910–8 | 3.610–10 |
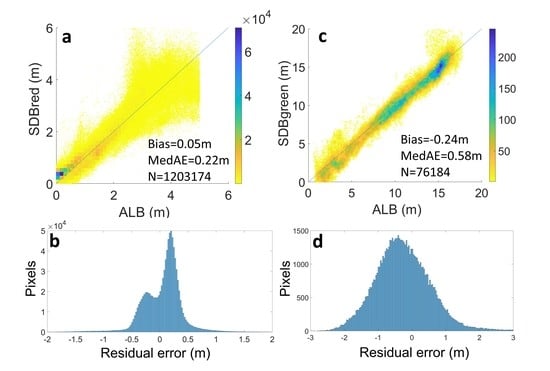
| Algorithm | Depth (m) | Bias (m) | MedAE (m) | MAE (m) | n |
|---|---|---|---|---|---|
| SDBgreen | 0–18 | −0.24 | 0.58 | 0.64 | 76,184 |
| 0–5 | −0.32 | 0.78 | 0.86 | 14,035 | |
| 5–10 | −0.21 | 0.54 | 0.63 | 23,615 | |
| 10–18 | −0.18 | 0.44 | 0.56 | 38,534 | |
| SDBred | 0–5 | 0.05 | 0.22 | 0.26 | 1,203,174 |
| 0–2.5 | 0.04 | 0.2 | 0.21 | 1,062,814 | |
| 2.5–5 | 0.07 | 0.45 | 0.55 | 140,360 |
| Product | Bias | MedAE | n |
|---|---|---|---|
| pSDBred445 (0.7–3.2) | −0.15 | 0.109 | 21,719 |
| pSDBed490 (0.7–3.2) | −0.33 | 0.26 | 22,091 |
| pSDBred445 (0.7–2.5) | −0.069 | 0.078 | 18,262 |
| pSDBred490 (0.7–2.5) | −0.17 | 0.14 | 17,157 |
| pSDBgreen445 | 0.054 | 0.058 | 28,148 |
| pSDBgreen490 | −0.0023 | 0.016 | 31,858 |
| Rrs709 & Rrs704 | 0.0013 1/sr | 0.0014 1/sr | 27,148 |
| Rrs754 & Rrs740 | 0.00037 1/sr | 0.00046 1/sr | 15,844 |
| Rrs779 & Rrs783 | 0.00062 1/sr | 0.000681 1/sr | 8941 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caballero, I.; Stumpf, R.P.; Meredith, A. Preliminary Assessment of Turbidity and Chlorophyll Impact on Bathymetry Derived from Sentinel-2A and Sentinel-3A Satellites in South Florida. Remote Sens. 2019, 11, 645. https://doi.org/10.3390/rs11060645
Caballero I, Stumpf RP, Meredith A. Preliminary Assessment of Turbidity and Chlorophyll Impact on Bathymetry Derived from Sentinel-2A and Sentinel-3A Satellites in South Florida. Remote Sensing. 2019; 11(6):645. https://doi.org/10.3390/rs11060645
Chicago/Turabian StyleCaballero, Isabel, Richard P. Stumpf, and Andrew Meredith. 2019. "Preliminary Assessment of Turbidity and Chlorophyll Impact on Bathymetry Derived from Sentinel-2A and Sentinel-3A Satellites in South Florida" Remote Sensing 11, no. 6: 645. https://doi.org/10.3390/rs11060645