A Novel Approach for the Detection of Developing Thunderstorm Cells



Abstract
:
1. Introduction
2. Materials and Methods
2.1. Method
2.2. Validation Approach
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AMV | Atmospheric Motion Vectors |
| BT | Brightness Temperature |
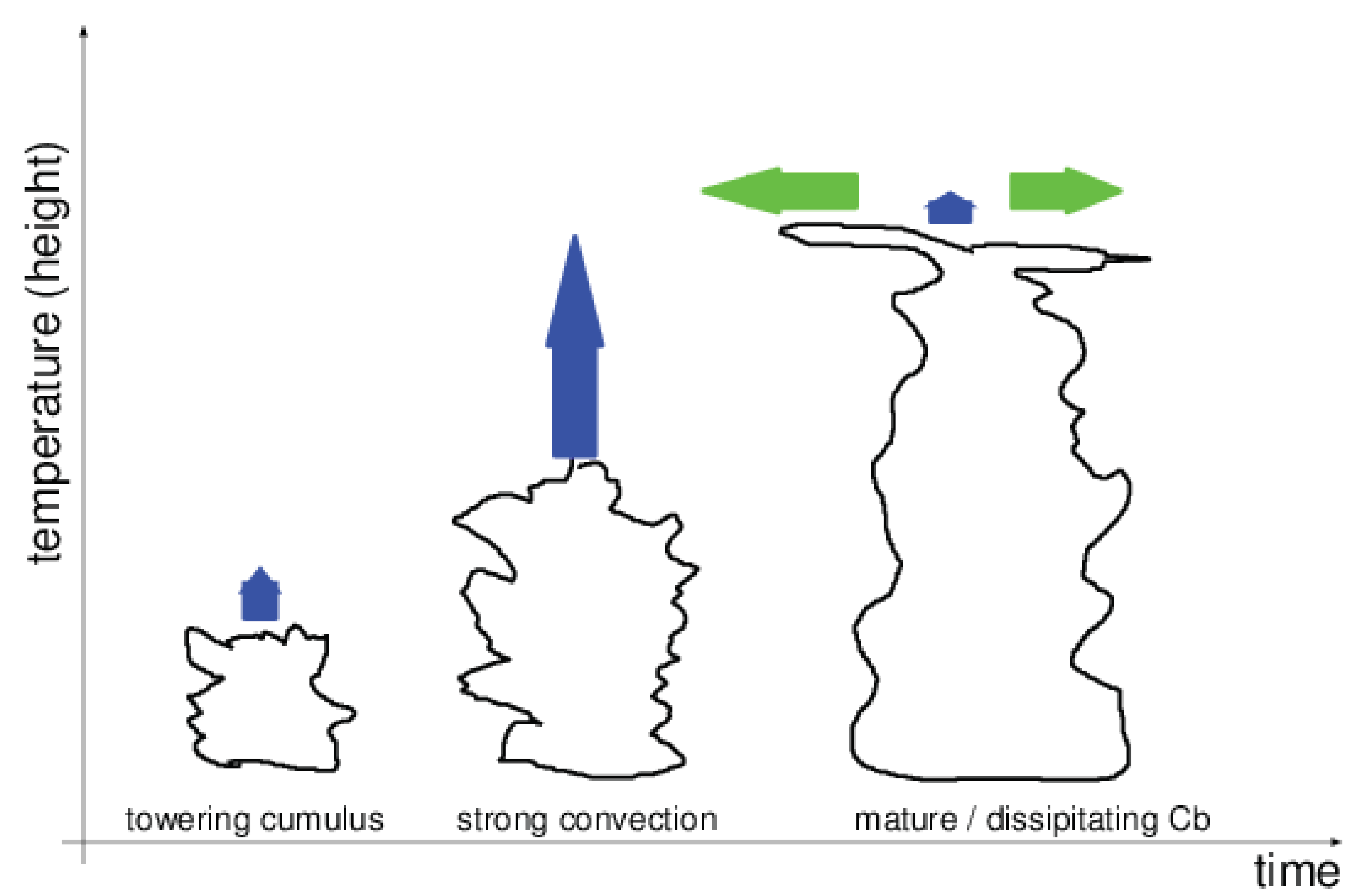
| Cb | Cumulonimbus |
| CMV | Cloud Motion Vectors |
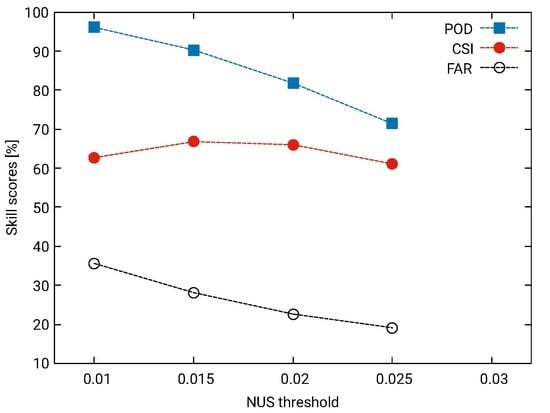
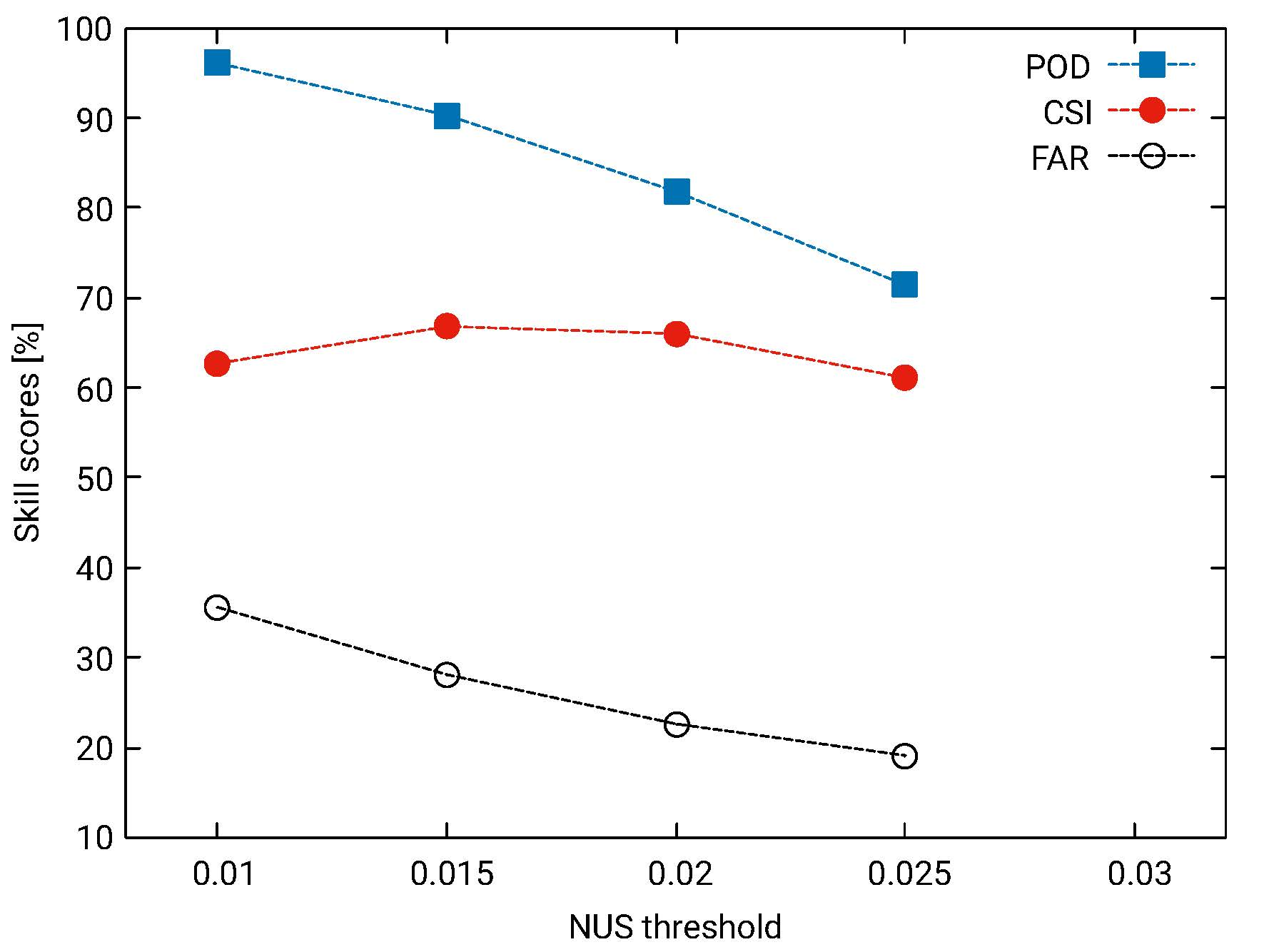
| CSI | Critical Success Index |
| CTH | Cloud Top Height |
| ECMWF | European Centre for Medium Weather Forecasts |
| FAR | False Alarm Ratio |
| ICON | NWP model of Deutscher Wetterdienst |
| IFS | Integrated Forecast System |
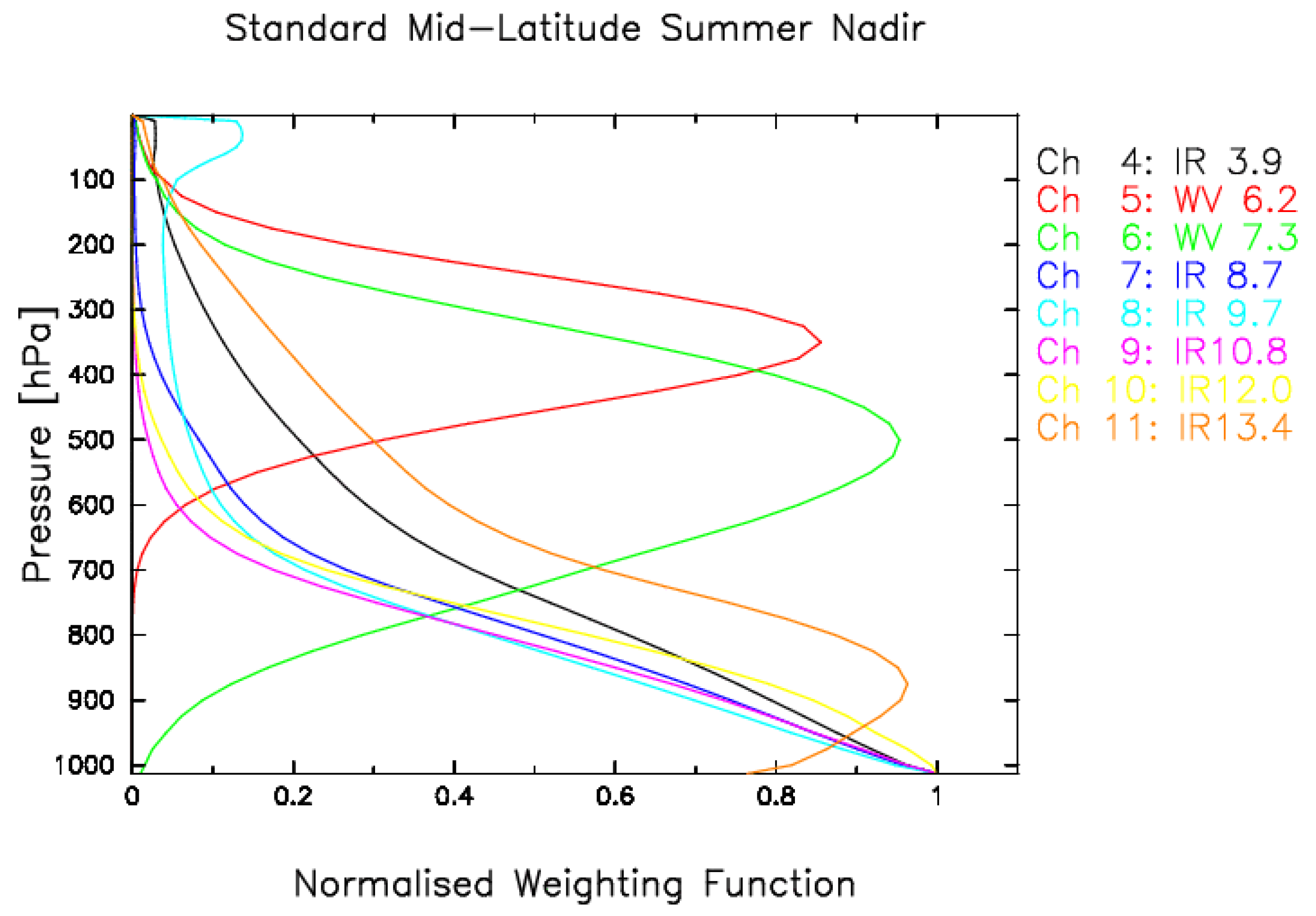
| IR | InfraRed |
| KO | Convection Index |
| MSG | Meteosat Second Generation |
| MTG | Meteosat Third Generation |
| Meteosat | Meteorological satellite |
| NWP | Numerical Weather Prediction |
| POD | Probability of Detection |
| SEVIRI | Spinning Enhanced Visible and InfraRed Imager |
| SR | Search Region |
| WV | Water Vapor |
Appendix A
References
- Schmetz, J.; Tjemkes, A.; Gube, M.; van der Berg, L. Monitoring deep convection and convective overshooting with Meteosat. Adv. Space Res. 1997, 19, 433–441. [Google Scholar] [CrossRef]
- Mosher, F. Detection of deep convection around the globe. In Proceedings of the 10th Conference on Aviation, Range, and Aerospace Me- Teorology; American Meteorological Society: Portland, OR, USA, 2002; pp. 289–292. [Google Scholar]
- Donovan, M.F.; Williams, E.R.; Kessinger, C.; Blackburn, G.; Herzegh, P.H.; Bankert, R.L.; Miller, S. The Identification and VErificantion of Hazardous Convective Cells over Oceans Using Visible and Infrared Satellite Observations. J. Appl. Meteorol. Climatol. 2008, 47. [Google Scholar] [CrossRef]
- Müller, R.; Haussler, S.; Jerg, M. The Role of NWP Filter for the Satellite Based Detection of Cumulonimbus Clouds. Remote Sens. 2018, 10, 386. [Google Scholar] [CrossRef]
- Deierling, W.; Petersen, W.A.; Latham, J.; Ellis, S.; Christian, H.J. The relationship between lightning activity and ice fluxes in thunderstorms. J. Geogr. Res. 2008, 113. [Google Scholar] [CrossRef] [Green Version]
- Mecikalski, J.; MacKenzie, W.; Koenig, M.; Muller, S. Cloud-Top Properties of Growing Cumulus prior to Convective Initiation as Measured by Meteosat Second Generation. Part I: Infrared Fields. J. Appl. Meteorol. Climatol. 2010, 49, 521–534. [Google Scholar] [CrossRef]
- Merk, D.; Zinner, T. Detection of convective initiation using Meteosat SEVIRI: Implementation in and verification with the tracking and nowcasting algorithm Cb-TRAM. Atmos. Meas. Tech. 2013, 6, 1903–1918. [Google Scholar] [CrossRef]
- Okabe, I.; Imai, T.; Izumikawa, Y. Detection of Rapidly Developing Cumulus Areas through MTSAT Rapid Scan Operation Observations; Meteorological Satellite Center Technical Note; JMA: Tokyo, Japan, 2011. [Google Scholar]
- Autones, F. Algorithm Theoretical Basis Document for Convection Products; Technical Report; NWC-SAF: Toulouse, France, 2016. [Google Scholar]
- Lee, S.; Han, H.; Im, J.; Jang, E.; Lee, M.I. Detection of deterministic and probabilistic convection initiation using Himawari-8 Advanced Himawari Imager data. Atmos. Meas. Tech. 2017, 10, 1859–1874. [Google Scholar] [CrossRef] [Green Version]
- Bedka, K.M.; Mecikalski, J.R. Application of Satellite-Derived Atmospheric Motion Vectors for Estimating Mesoscale Flows. J. Appl. Meteorol. 2005, 44, 1761–1772. [Google Scholar] [CrossRef]
- Urbich, I.; Benidx, J.; Múller, R. A Novel Approach for the Short-Term Forecast of the Effective Cloud Albedo. Remote Sens. 2018, 10, 955. [Google Scholar] [CrossRef]
- Schmetz, J.; Pili, P.; Tjemkes, S.; Just, D.; Kerkmann, J.; Rota, S.; Ratier, A. An Introduction to Meteosat Second Generation (MSG). Bull. Am. Meteorol. Soc. 2002, 83, 977–992. [Google Scholar] [CrossRef]
- Gijben, M.; de Coning, C. Using Satellite and Lightning Data to Track Rapidly Developing Thunderstorms in Data Sparse Regions. Atmosphere 2017, 8, 67. [Google Scholar] [CrossRef]
- Rorig, M.; Bothwell, P. Predicting Dry Lightning Risk Nationwide. Fire Sci. Brief 2012, 149. Available online: www.firescience.gov (accessed on 10 January 2019).
- Available online: https://www.wmo-sat.info/oscar/instruments/view/503 (accessed on 21 August 2018).
- Moncrief, M.W.; Miller, M.J. The dynamics and simulation of tropical cumulonimbus and squall lines. Q. J. R. Meteorol. Soc. 1976, 120, 373–394. [Google Scholar] [CrossRef]
- Bechtold, P.; Köhler, M.; Jung, T.; Doblas-Reyes, F.; Leutbecher, M.; Rodwell, M.J.; Vitart, F.; Balsamo, G. Advances in simulating atmospheric variability with the ECMWF model: From synoptic to decadal time-scales. Q. J. R. Meteorol. Soc. 2008, 134, 1337–1351. [Google Scholar] [CrossRef] [Green Version]
- Available online: www.ecmwf.int/en/forecasts/documentation-and-support/changes-ecmwf-model/ifs-documentation (accessed on 10 September 2017).
- Betz, H.D.; Schmidt, K.; Laroche, P.; Blanchet, P.; Oettinger, W.P.; Defer, E.; Dziewit, Z.; Konarski, J. LINET—An international lightning detection network in Europe. Atmos. Res. 2009, 91, 564–573. [Google Scholar] [CrossRef]
- Betz, H.; Schmidt, K.; Oettinger, W.; Montag, B. Cell-tracking with lightning data from LINET. Adv. Geosci. 2008, 17, 55–61. [Google Scholar] [CrossRef] [Green Version]
- Sengupta, S.K.; Welch, R.M.; Navar, M.; Berendes, T.A.; Chen, D.W. Cumulus Cloud Field Morphology and Spatial Patterns Derived from High Spatial Resolution Landsat Imageery. J. Appl. Meteorol. 1990, 29, 1245–1267. [Google Scholar] [CrossRef]
- Orit, A.; Ilan, K.; Graham, F.; Mikhail, O.; Erick, F.; Guy, D.; Lital, P.; Ricki, Y.; Qian, C. Characterization of cumulus cloud fields using trajectories in the center of gravity versus water mass phase space: 2. Aerosol effects on warm convective clouds. J. Geophys. Res. Atmos. 2016, 121, 6356–6373. [Google Scholar]
- Trapp, R.J. Mesoscale-Convective Processes in the Atmosphere; Cambridge University Press: Cambridge, UK, 2013. [Google Scholar]
- Mecikalski, J.R.; MacKenzie, W.M.; König, M.; Muller, S. Cloud-Top Properties of Growing Cumulus prior to Convective Initiation as Measured by Meteosat Second Generation. Part II: Use of Visible Reflectance. J. Appl. Meteorol. Climatol. 2010, 49, 2544–2558. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | CI If | NWP/Period | POD (%) | FAR (%) | CSI (%) | Time Lightning |
|---|---|---|---|---|---|---|
| 1 | NUS > 0.02 | IFS/2016 | 81.8 | 22.6 | 66.0 | +4–19 min |
| 2 | NUS > 0.02 | none/2016 | 85.9 | 28.6 | 63.8 | +4–19 min |
| 3 | NUS > 0.015 | IFS/2016 | 90.3 | 28.1 | 66.8 | +4–19 min |
| 4 | NUS > 0.015 | IFS/2016 | 88.6 | 25.1 | 68.3 | +4–29 min |
| 5 | NUS > 0.02 | IFS/2017 I | 89.2 | 36.4 | 59.1 | +4–19 min |
| 6 | NUS > 0.02 | none/2017 | 90.1 | 47.6 | 49.8 | +4–19 min |
| 7 | NUS > 0.02 | IFS/2017 I | 87.6 | 32.5 | 61.6 | +4–29 min |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Müller, R.; Haussler, S.; Jerg, M.; Heizenreder, D. A Novel Approach for the Detection of Developing Thunderstorm Cells. Remote Sens. 2019, 11, 443. https://doi.org/10.3390/rs11040443
Müller R, Haussler S, Jerg M, Heizenreder D. A Novel Approach for the Detection of Developing Thunderstorm Cells. Remote Sensing. 2019; 11(4):443. https://doi.org/10.3390/rs11040443
Chicago/Turabian StyleMüller, Richard, Stéphane Haussler, Matthias Jerg, and Dirk Heizenreder. 2019. "A Novel Approach for the Detection of Developing Thunderstorm Cells" Remote Sensing 11, no. 4: 443. https://doi.org/10.3390/rs11040443