2.1. Modelling and Analysis
The general geometric configuration of the GNSS-R BSAR is shown in
Figure 1. The receiver is mounted on an airplane moving in parallel to the ground along the x direction with a constant velocity
Vr, and the transmitter is mounted on the GNSS satellite moving along its Kepler orbit. The target is positioned on the ground plane (x-y plane). The bi-static angle
θ is defined as the angle between the target-to-satellite baseline and the target-to-receiver baseline. The receiver works in the broadside mode, and the beam centre of the receiver antenna falls at the y axis at
t = 0. Here,
t represents the azimuth slow time. The beam of the transmitter antenna covers most area of the Earth’s surface, and the antenna pattern is considered as constant in the imaging duration. For convenience of expression, in the following part of this paper, the slant range between the target and the satellite is referred to as the transmitter range, and the slant range between the target and the receiver is referred to as the receiver range.
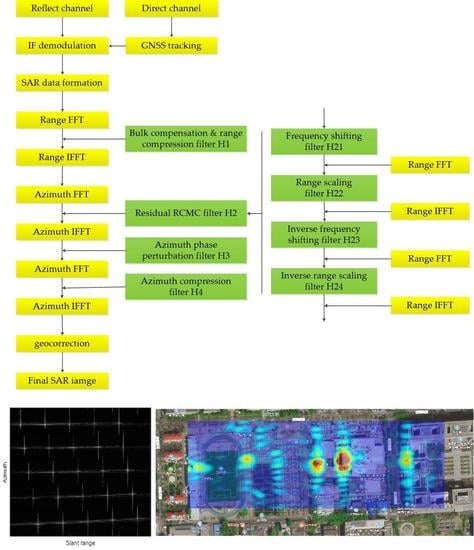
For a typical SAR system, the transmitted signal is Linear Frequency Modulated (LFM). The GNSS system is not designed for SAR imaging application, and the structure of the transmitted signal is different from the LFM wave. For example, the GPS signal has three levels in structure: the bottom level is the carrier wave at the L-band; the middle level is the ranging codes, which are pseudorandom sequences; the upper level is the information code that carries the navigation message. For these three sequences, only the ranging code is used for imaging, and thus, the synchronization process should be performed firstly to cancel the other two sequences [
15].
Assume the beam centre of the receiving antenna is focusing at target
k at
t = t0. Then, the echo data of target
k after synchronization and SAR data formation could be expressed as:
where
a(
t) is the antenna pattern of the receiver,
C(
τ) is the ranging code sequence,
τ is the fast time,
λ is the wavelength of the carrier, and
c is the speed of light.
Rk(
t) is the total slant range, and
Rk(
t) =
Rtrk(
t) +
Rtsk(
t).
Rtrk(
t) is the receiver range for target
k, and
Rtsk(
t) is the transmitter range for target
k.
Assume that target
k0 has the same minimum transmitter range as target
k. Then:
The receiver range has the form of a hyperbola:
Using the Equivalent Slant Range Mode (ESRM) [
29], the transmitter range can be expressed as:
where
V0 is the equivalent velocity and
φ is the equivalent squint angle.
As can be seen from (3), (4), and (5), since the range history of the echo data for GNSS-R BSAR is caused by the motion of both the GNSS satellite and the airplane, the Doppler history of the echo data consists of two square roots. In this case, the stationary phase point does not have an analytical solution [
30], and thus, the precise explicit expression of the echo data in the Range-Doppler (R-D) domain cannot be obtained. Although the approximate R-D expression of the echo data for airborne BSAR and some associated imaging algorithms have been developed [
31,
32,
33], the derivation is lengthy and tedious, and the accuracy of the approximation also decreases quickly when the bi-static angle increases. In this paper, a two step method is presented to get the R-D expression of the echo data more accurately for GNSS-R BSAR. It will be proven that the square root, which corresponds to the transmitter range, can be removed firstly by a bulk compensation. Then, the expression of the echo data is simplified into a quasi-mono-static case, which only has one square root. This process is referred to as slant range separation.
The slant range separation process is feasible due to the asymmetry between the transmitter range and the receiver range for GNSS-R BSAR. To show the details, we firstly take a look at the transmitter range. Again, GPS is chosen as an example.
The GPS orbit belongs to the high Earth orbit (HEO). The average altitude is about 20,200 km, and the orbit is very close to a circle. Since the altitude of the satellite is too high, if observed on the Earth’s surface, the spatial variation of the Doppler parameters of the GPS satellite is very slow. In fact, when the imaging scene is not too large and the integration time is not too long, the second and higher order components of the spatial variation of the transmitter range are negligible. It will be proven in the following by both theoretical derivation and simulation.
The orbit geometry of the GPS satellite is shown in
Figure 2. The Doppler FM rate can be calculated by:
Assuming that angle
φ is constant for targets in the imaging scene, the directional derivative of
fr on the ground plane is:
where
is the modulus of the gradient of
Rts on the ground plane, which is equal to the cosine of the elevation angle
α of the satellite. When
φ increases,
decreases, and cos
α increases. When
φ increases to
φmax, cos
α has the maximum value of one. Therefore:
where
Rts0 is the height of the satellite relative to the ground when
φ = 0 and
Vs is the velocity of the satellite.
Then, the maximum range error caused by ignoring the second order component of the spatial variation of the transmitter range is:
where
T is the integration time and
l is the size of the imaging scene.
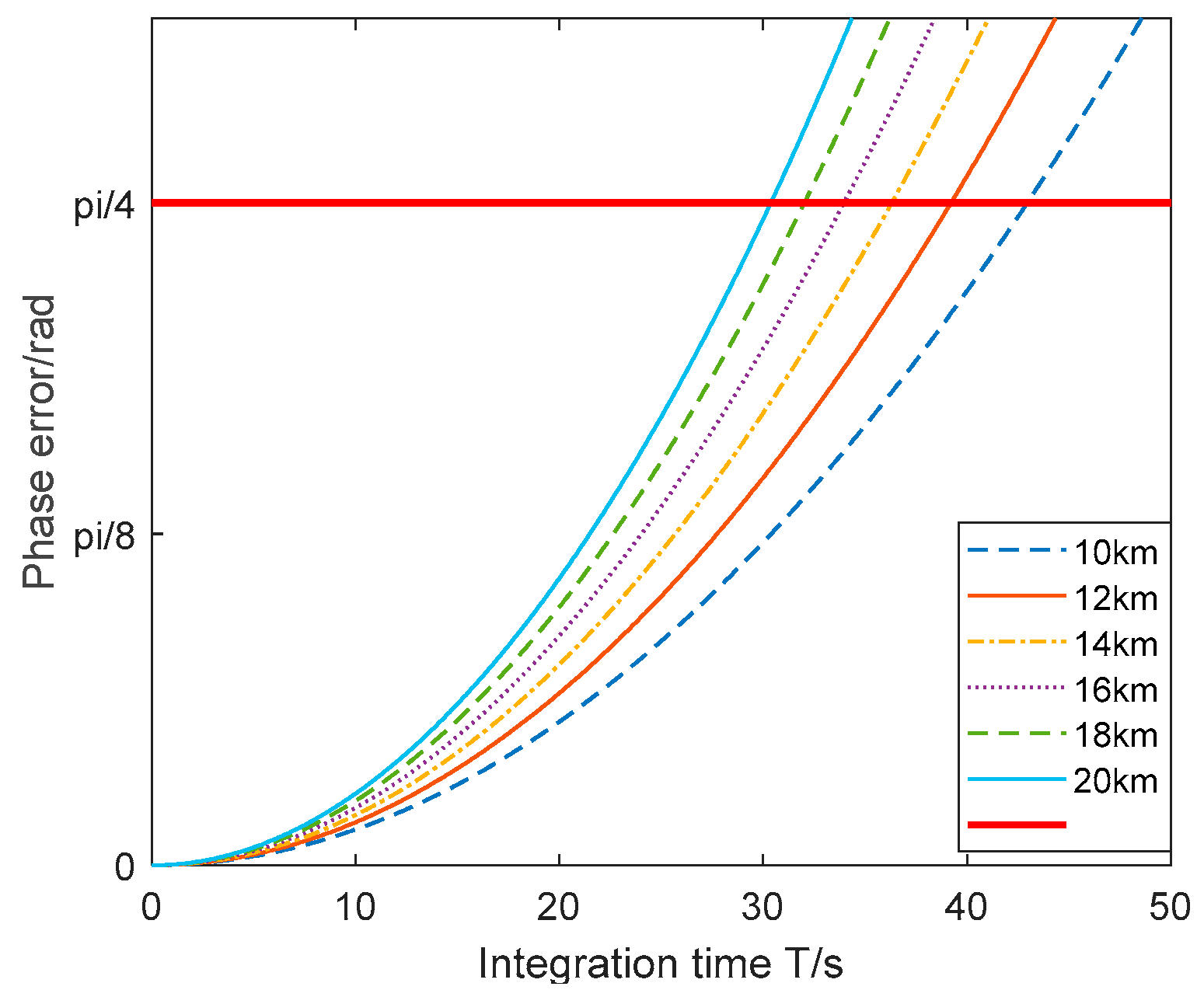
The corresponding phase error is:
The simulation result is shown in
Figure 3. The six curves correspond to the maximum phase error as a function of integration time for different sizes of the scene (10 km to 20 km with a linear spacing of 2 km from the bottom to the top). The red straight line corresponds to the π/4 phase error criterion for the GPS L5 carrier. It can be seen that, for an imaging scene no larger than 20 km × 20 km, the phase error caused by the second and higher order components of the spatial variation of the transmitter range is still acceptable even when the integration time reaches 30 s. Thus, if a bulk compensation for the transmitter range using the scene centre as the reference point is firstly applied, the residual transmitter range has only a fixed linear component. Then, the expression of the echo data is simplified into a quasi-mono-static case, which only has one square root, and the stationary phase point can then be calculated analytically.
After the bulk compensation for transmitter range, the echo signal for target
k0 becomes:
where
Rtsc(
t) is the transmitter range for target
c, which is positioned at the centre of the scene.
Expanding
at
t = 0 and keeping only those up to the first order, we have:
where:
Rshiftk is the position shift of the signal in the echo window. The Doppler frequency
fd and its derivative can be expressed as a function of the parameters of the satellite and the target.
where
is the unit directional vector of the x axis,
is the unit directional vector of the y axis, and
is the unit directional vector from the target to the satellite.
Substituting (12) into (11) leads to:
where:
The last approximation holds when the scene size and integration time are not too large.
where
ka is the Doppler FM rate for target
k caused by the motion of the receiver. The phase
φ1 is omitted because it has no impact on the derivation.
For mono-static SAR, the echo data for targets with the same minimum slant range have the same Doppler history and RCM curve. This means the echo data are translationally invariant. Thus, the imaging algorithms in the azimuth frequency domain are usually more efficient. Due to the non-parallel trajectory and different velocity of the transmitter and the receiver, the echo data for GNSS-R BSAR are translationally variant. This property can be observed by (17) in two aspects.
The spatially varying Doppler centroid: It is formed by the linear component of the residual transmitter range and represented by the spatially varying delay time tdk. This means the equivalent squint angle is also spatially varying.
The translational variant Doppler FM rate: It is formed by the constant component of the residual transmitter range and represented by the shifting factor Rshiftk. The shifting factor Rshiftk indicates that the echo data for targets with the same minimum receiver range (thus the same Doppler FM rate) will not appear in the same range cell. In other words, the signals that appear in the same range cell have a different Doppler FM rate.
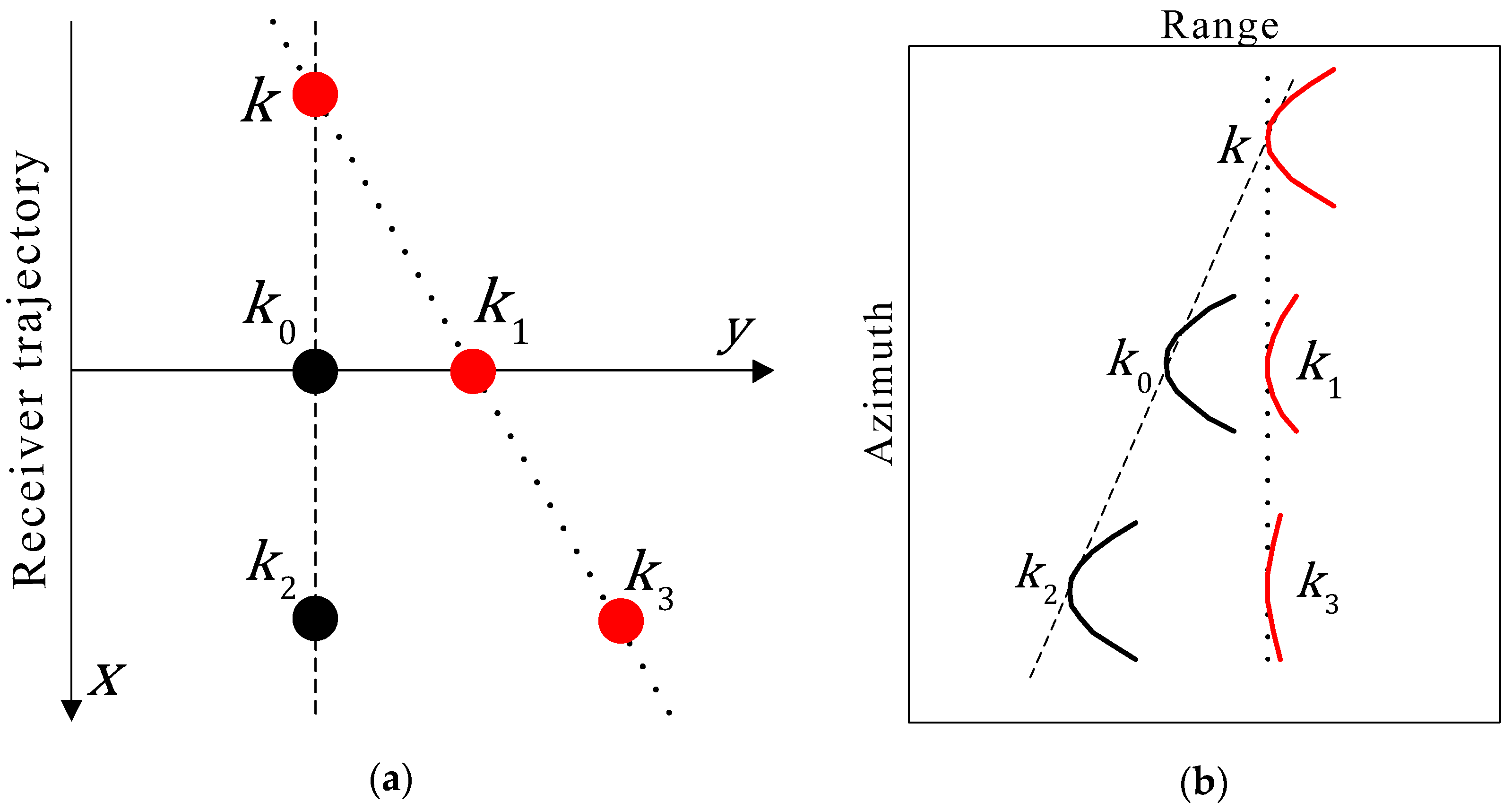
To illustrate the range cell shift effect of the shifting factor, two spaces are defined for GNSS-R BSAR, as shown in
Figure 4.
As can be seen from the figure, due to the effect of the shifting factor Rshiftk, for targets with the same minimum receiver range (thus the same Doppler FM rates since they are caused only by the motion of the receiver after bulk compensation for transmitter range) in the scene space, their echo data will not appear in the same range cell in the echo space. In other words, for the echo data in the same range cell, their Doppler FM rates are different. As an example, target k has the same minimum receiver range as target k0 and thus has the same Doppler FM rate as target k0. However, the echo data of target k appear in the same range cell as target k1 rather than target k0 in the echo space, since .
In order to focus the echo data efficiently in the R-D domain, the Doppler FM rate in the same range cell needs to be equalized. Here, the term “equalize” means making the Doppler FM rates equal. Firstly, we consider the shifting curve Rshiftk.
The first term of Rshiftk is caused by the difference in transmitter range for different targets at t = 0. This term is positively related to the bi-static angle θ. Since θ varies widely in different receiving geometry, this term also varies widely and in general is also the dominating term of Rshiftk. This term is a linear function of the azimuth time. The second term is caused by the variation of the Doppler frequency along the direction of the receiver velocity, and this is a quadratic function of the azimuth time. The third term is caused by the variation of the Doppler frequency along the cross direction of the receiver velocity, and it is also a linear function of the azimuth time, but the slope varies with y0.
The latter two terms are a function of x
0 and y
0, which are negligible when the imaging scene is not too large. Ignoring the second term, we have:
which is a linear function of the azimuth time.
Correspondingly, for targets whose echo data appear in the same range cell, the minimum receiver range is:
where:
Then, the Doppler FM rate along the same range cell is:
It can be seen that the Doppler FM rate along the same range cell is approximately a linear function of the azimuth time. Therefore, a cubic perturbation function is sufficient to equalize the Doppler FM rate along the range cell.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}