3.1. SARAH-2
In
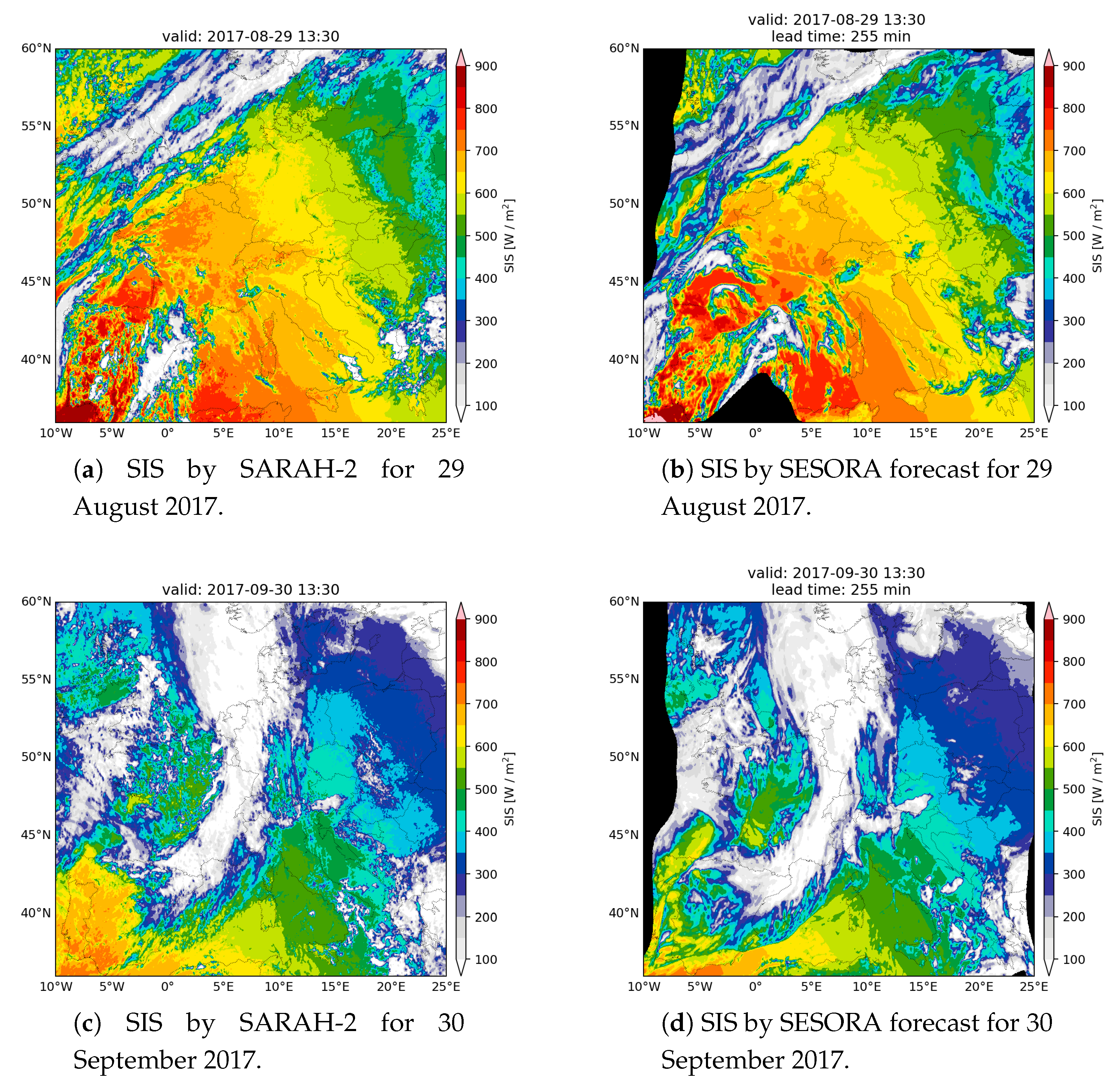
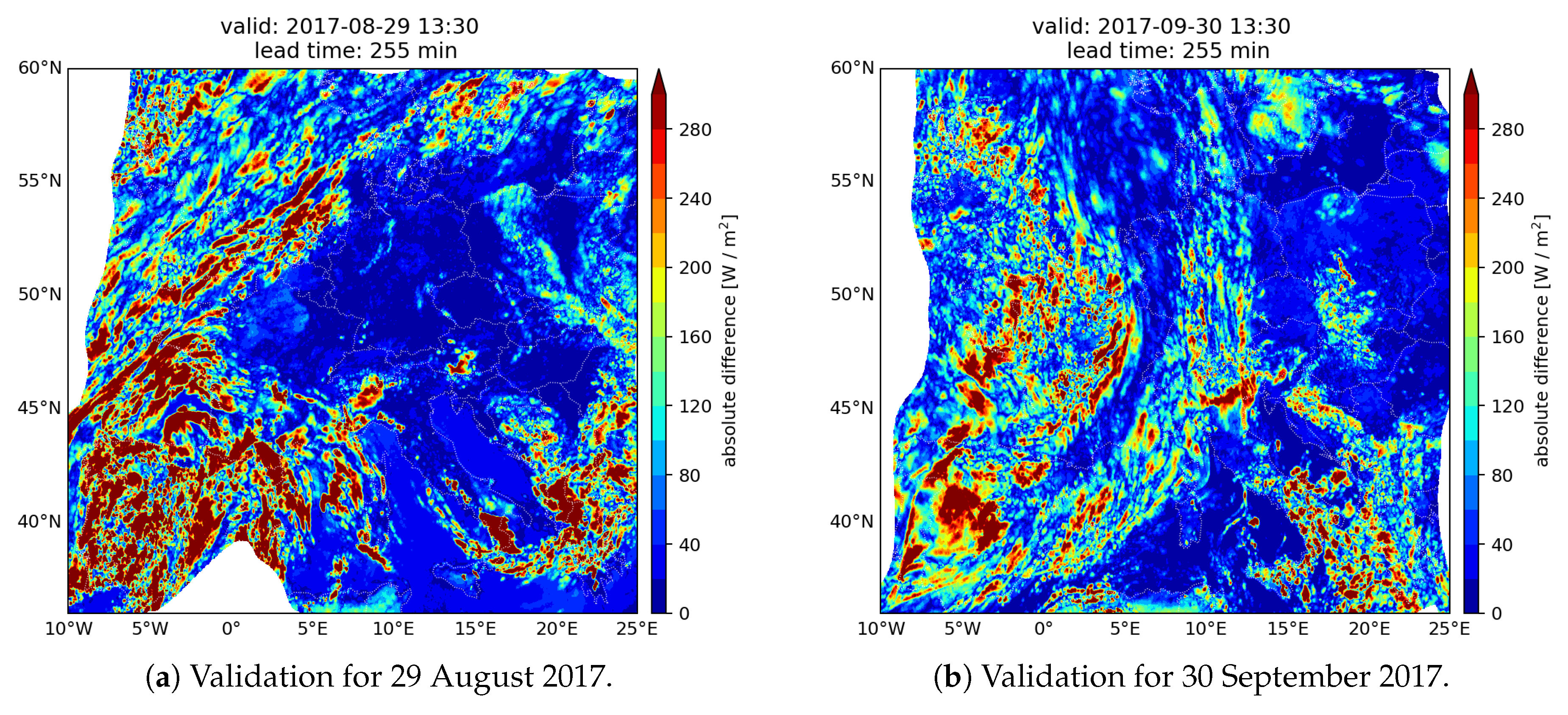
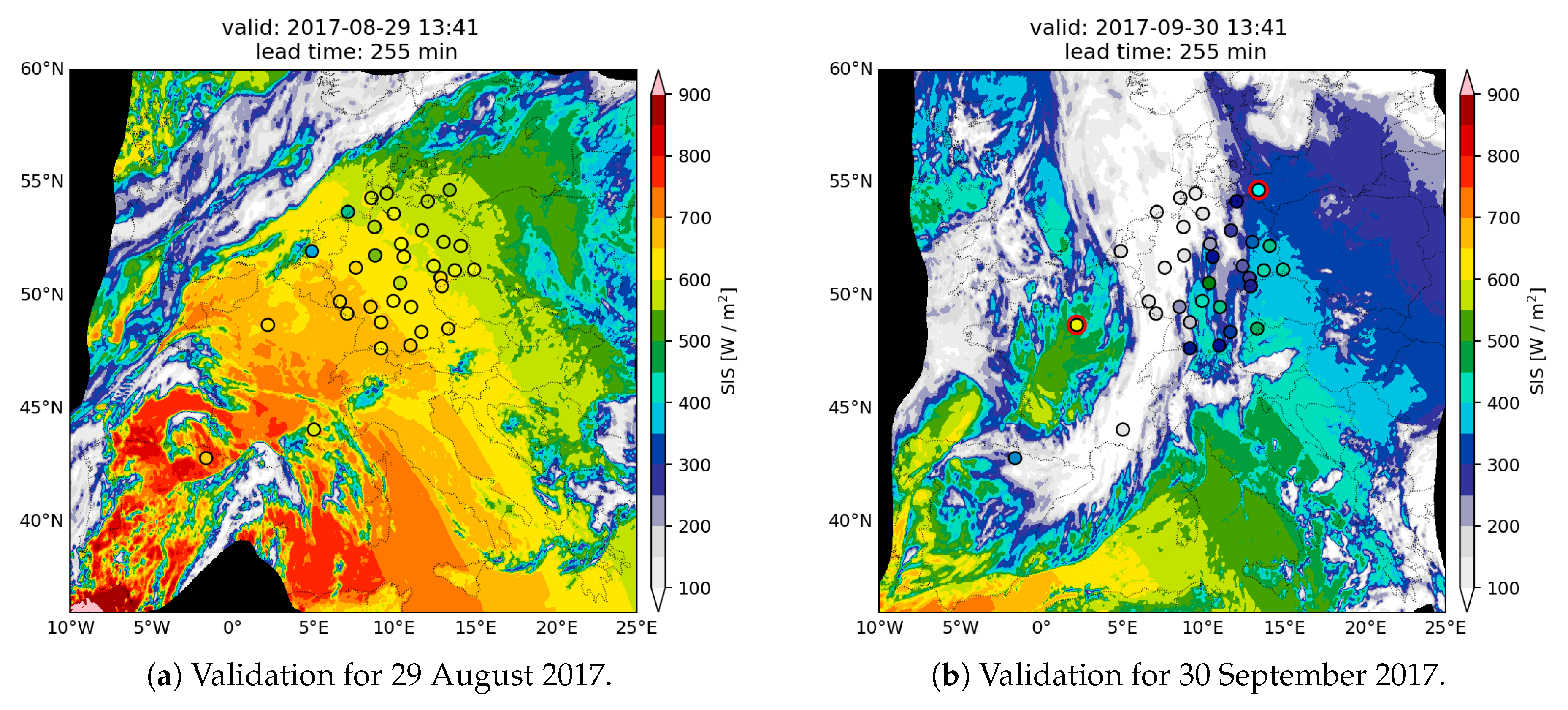
Figure 2 the solar surface radiation is depicted for two different cases. The first case (
Figure 2a,b) is 29 August 2017. The general weather situation was a high pressure system over central Europe. The second case (
Figure 2c,d) is 30 September 2017 and in that case there was a low pressure system over western Europe and a front was passing Germany during the day. These cases were selected due to their different occurrence of clouds and solar radiation. A 255 min (4 h 15 min) forecast is shown in
Figure 2b,d with the corresponding estimated SARAH-2 data set in
Figure 2a,c.
The forecasted radiation for the first case shows promising results compared to the SARAH-2 data. All in all, general structures are well met, as well as the height of the values themselves. The cloud structure over the North Sea is also shown by the nowcasting, however with less detail and a light displacement. This nowcasting consists of the optical flow of effective cloud albedo and the calculation of the radiation with SPECMAGIC NOW. Therefore, errors can be caused by two separate sources. That the cloud structure shows less details is probably caused by the effective cloud albedo nowcasting. Further, the broken clouds over Spain are displaced in the nowcasting. In particular, smaller clouds are more affected by the algorithm, as the fraction of cloud edges in relation to the inner part of the cloud is larger. Cloud borders can cause errors due to wrong advection and cloud dissipation or formation. Since the nowcasting works without any kind of boundary conditions or data beyond the depicted area there will always be some part of the plot with no data. This part is displayed in black. It grows with increasing forecast time because the edge is moving inwards. However, this is not a problem for the application of the SESORA forecast since the distribution (DSO) and transmission system operators (TSO) who will use the forecast only need the area of Germany and the surrounding regions.
Similar results can be observed in the second case. Except for smaller details, the position of clouds and the height of the radiation values are comparable. The structure of the front in the SARAH-2 data consists of more small clouds, which may have blurred out due to the long forecast time and the southern end of the front advecting too slowly in the nowcasting. Moreover, there is a cloud hole over southern Germany with higher radiation values than in the nowcasting, which is a result of an optically too thick cloud calculated by SPECMAGIC NOW. In general, one can say that cloud borders pose the biggest problem to the radiation forecast, as has been discussed before. Thus, the more small clouds, the higher the incidence of problematic edge regions, and the higher the errors will be.
To prove and visualize the previously seen differences, the absolute bias was calculated according to Equation (
5), between the solar surface radiation nowcasting and the SARAH-2 data set. The results are displayed in
Figure 3. The regions with higher errors correspond to the above mentioned regions. The cause of these errors are missing cloud structures, for instance over Austria, as well as incorrectly forecasted cloud edges, as can be seen over the North Sea and Spain (
Figure 3a). These errors grow as usual with increasing forecast time. The absolute bias for 255 min equals 92 W/m
and the RMSE equals 143 W/m
. As this is a nowcasting of solar surface irradiance, the values, and also the errors, decrease when the sun sets. This effect cannot be seen at this stage of the forecast, however it can be observed in
Figure 4.
In the case of 30 September 2017 the validation appears different (
Figure 3b). One of the issues in the nowcasting was the broken prefrontal clouds. Due to a generally less detailed effective cloud albedo, nowcasting the structure of these clouds looks different. This led to a slightly incorrect nowcasting of solar radiation between the clouds. Another problem is the back of the front. Smaller cloud structures are missing as well. What can be observed in
Figure 3b are many smaller regions of errors over Germany, which are not as big as the error behind the front over France. An absolute bias of 79 W/m
and a RMSE of 112 W/m
have been found for this case.
In
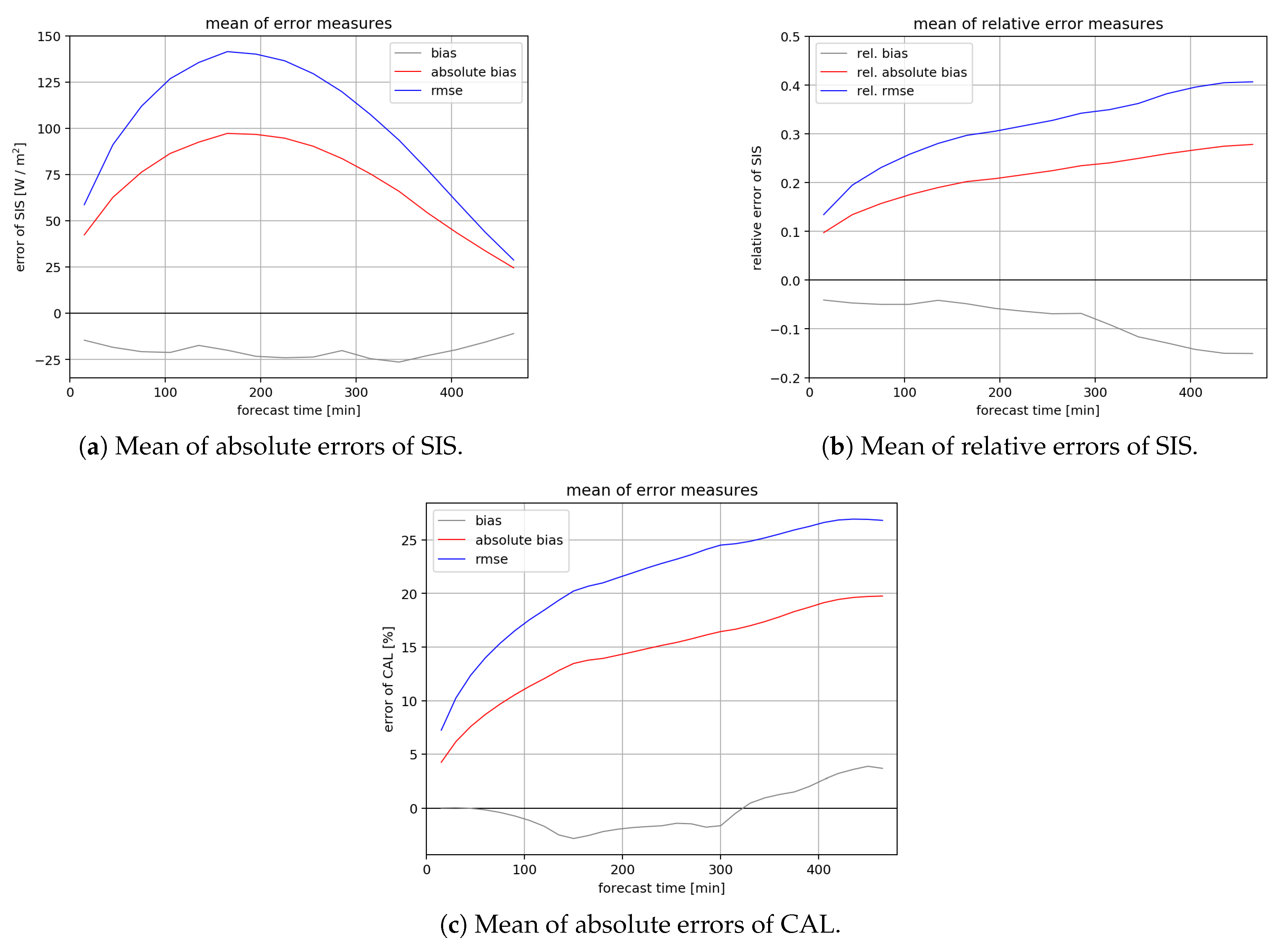
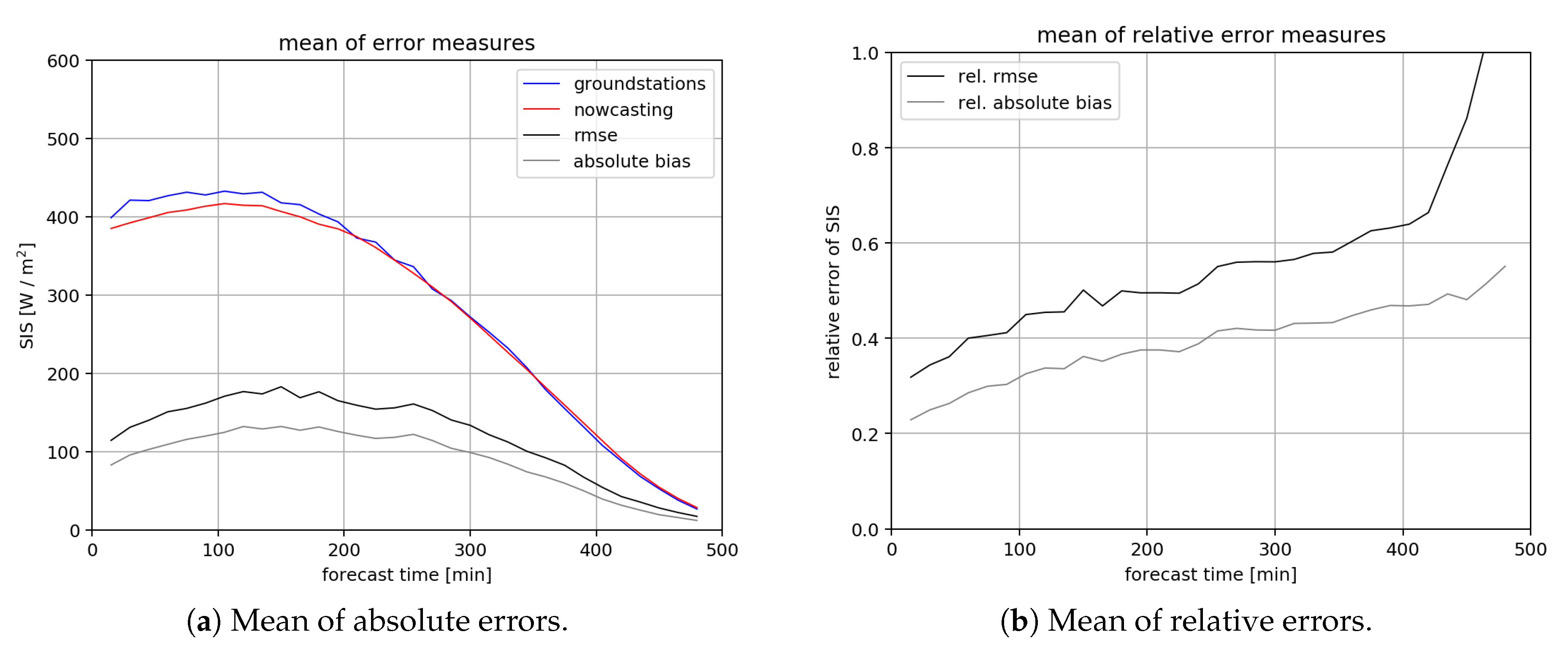
Figure 4 the mean of all error measures for all cases is plotted against forecast time. In
Figure 4a there are the absolute measures and in
Figure 4b there are the relative error measures. A list of all cases examined can be found in
Table A3 and
Table A4. All forecasts were initiated at 09:15 UTC and the maximum forecast time was 480 min. Depicted are the bias (gray), the absolute bias (red), and the root mean square error (blue), respectively. What can be observed in
Figure 4a is that the absolute bias and RMSE grow with increasing forecast time until approximately 180 min. After that, both error measures decrease again due to sunset. The behavior of the bias looks different because it does not represent an absolute error but rather a tendency. Therefore, one can say that for all times the nowcasting underrates solar irradiation, thus the estimated solar radiation by SARAH-2 delivers higher SIS values (Equation (
4)). This is a result of SPECMAGIC NOW, which currently calculates the optical thickness of clouds higher than it should, due to
being too low (Equation (
2)). In fact, this kind of error can be fixed quite quickly, and an update of SPECMAGIC NOW is already planned, where
will be adapted to reduce the bias. The relative errors show, as expected, a different behavior. As the errors are normed by the mean of the observed SIS values, the sunset does not play a role in this case (Equations (
7)–(
9)). The relative absolute bias and the relative RMSE rise with increasing forecast time. The slope of these two curves decreases with increasing forecast time, which results in a slower growth of the relative errors. The maximum of the RMSE is 0.41 and the maximum value of the relative absolute bias is 0.28. For the sake of a forecast validation without the influence of the solar altitude the mean of all error measures of the effective cloud albedo is depicted in
Figure 4c. The absolute bias and RMSE show the same behavior as the absolute bias and RMSE of the relative errors of SIS. The bias is negative for the first 300 min and turns positive afterwards.
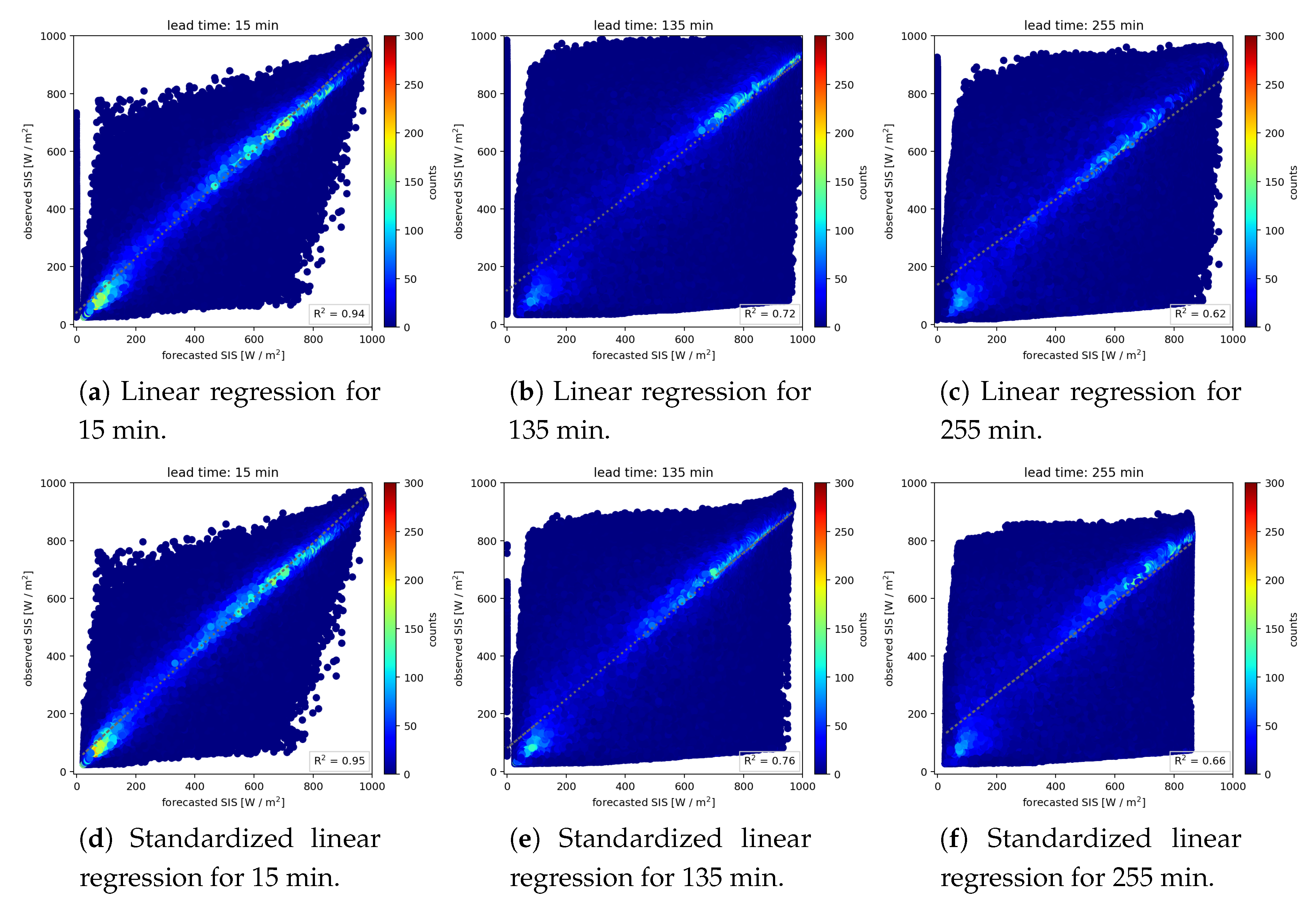
Another method of verifying the quality of the SESORA forecast is a linear regression for all examined cases. Therefore the forecasted values of solar radiation were plotted against the observed radiation with the help of the SARAH-2 data set for each pixel in every frame and for each case dependent upon the forecast time. The results are shown in
Figure 5. Moreover, a standardized regression was done where the solar zenith angle of the forecasted and observed solar radiation was corrected. Thus, sunset is less important for the quality of the forecast. As expected the distribution in
Figure 5a–c gets broader with increasing forecast time and the values of SIS get smaller in the observation as well as in the nowcasting because of the sunset. Most of the data points are lying on the diagonal whereby the distribution is split into a maximum for smaller and a maximum for higher values of solar irradiance. This behavior remains unchanged throughout the forecast. The slope is smaller than 1 for all forecast times, which underlines the negative bias found in
Figure 4. As can be seen in
Figure 5 for the forecast times 135 min and 255 min, the observed values are higher than the forecasted SIS values especially for small values. As a comparison, the bias for all forecast times until 400 min was
W/m
. Looking at the spread we can see that there are more small values of solar radiation, and therefore the linear regression does not begin at the origin as it is shifted upwards. That is also the reason for general slope values below 1 for all forecast times. The quality of the linear regression is represented by the R
-value, which is displayed in the lower right corner of each linear regression plot. After 15 min the R
remains quite high with a value of 0.94. After 135 min we found a R
of 0.72. A forecast time of 2 h is a typical length for nowcasting, thus it is a common forecast time for comparisons with other publications. Sirch et al. found a R
-value of 0.71 for a DNI (Direct Normal Irradiance) nowcasting after 120 min in March and a value of 0.64 in July [
29]. It can be observed that the forecast quality improves when the angle of the sun is being corrected. This underlines the fact that the bias of
W/m
found in the validation with the SARAH-2 data arises from a systematic error in SPECMAGIC NOW. The p-value for all forecast times was smaller than
, which shows the high significance of the distribution. It also proves that the distribution of the data is non-normal thus we can reject the null hypothesis.
It is essential to distinguish between different error sources in a nowcasting, for the improvement of the algorithm, however, the more steps of computation are involved, the more complications may be found. For the SESORA forecast we found a systematic error in the calculation of the solar surface irradiance, which can be clearly seen in the constant bias in
Figure 4. This bias can be corrected by adjustments in SPECMAGIC NOW and it is not related to TV-
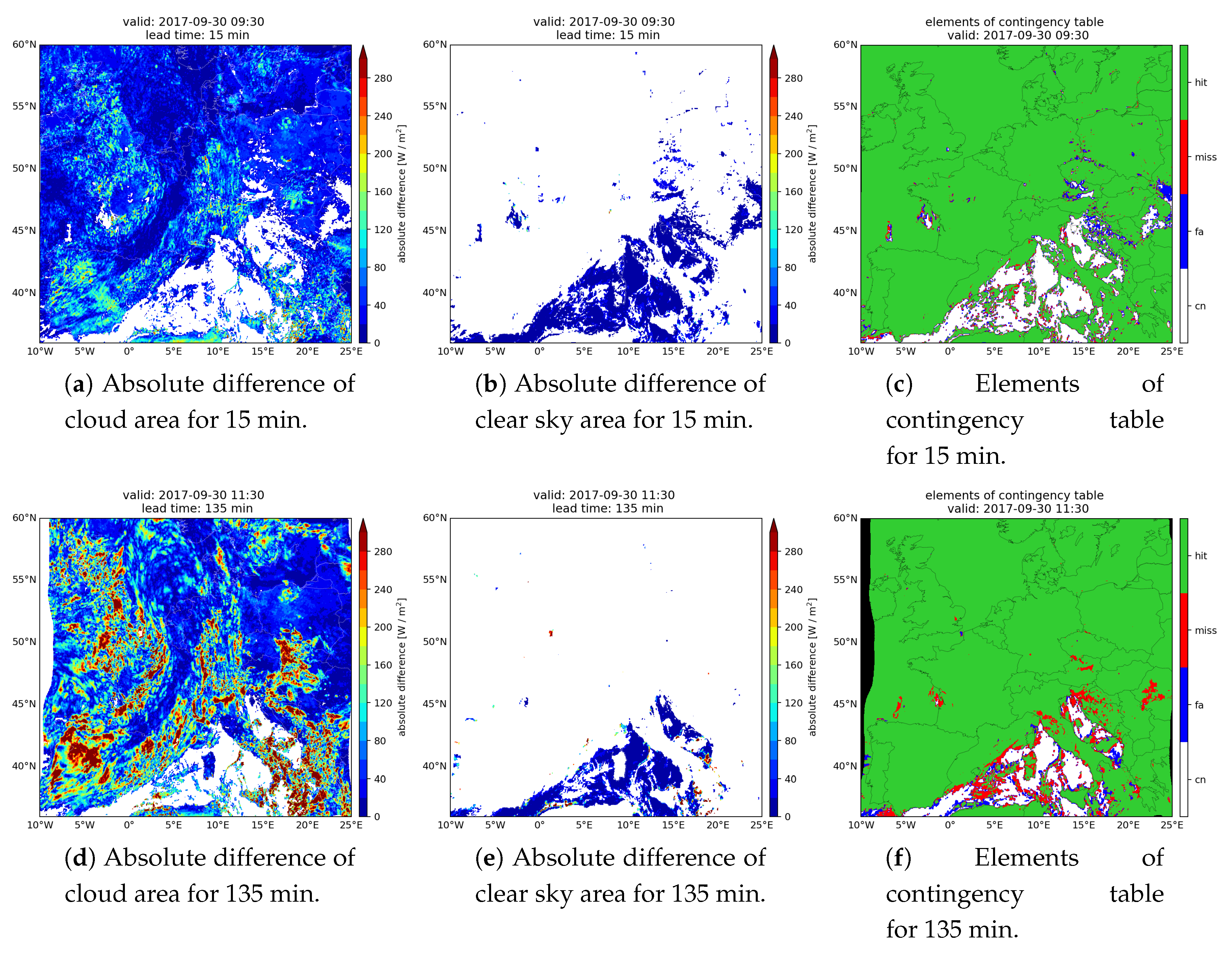
. For the remaining part of our algorithm, which is the nowcasting of the effective cloud albedo, we divided the errors into cloudy pixels and clear sky pixels (
Section 2.4). The idea is to detect errors resulting from convection or advection separately. The results are shown in
Figure 6.
In
Figure 6c,f, the errors that are marked miss and false alarm (fa) mostly arise from wrong advection of the optical flow algorithm. When the TV-
method calculates a cloud motion too slowly or too quickly, this leads to errors at the edge of the clear sky area. In the cloudy area this error can occur as well, however we cannot find them with our analysis. If our algorithm calculates the cloud motion too slowly we will get a miss and if the motion is calculated too quickly we will get a false alarm. However, in general we detect more misses than false alarms. Moreover, the errors rise with increasing forecast time as can be seen in
Figure 6f. The magnitude of errors cannot be extracted from this graphic, although when we take
Figure 6b into account we can see that the errors due to wrong advection are rather small. The errors in
Figure 6b,e are small in general. Thus, the errors with the highest magnitude are caused by clouds. These kind of errors can be detected in
Figure 6a,d and they all are caused by a change of intensity of the effective cloud albedo over time. As was already mentioned in Urbich et al. [
12], the change of the pixel intensity over time is a major issue for the optical flow. These errors have the highest magnitude and appear more frequently than errors due to wrong advection. As usual, all errors grow with increasing forecast time (
Figure 6d–f).
3.2. Ground Stations
In
Figure 7a the nowcasting for 255 min of the solar surface irradiance is displayed for 29 August 2017. Overall, the measurements of the ground stations show agreement with the nowcasting in this case. For this type of validation we must keep in mind that the geometry of these two measurements is completely different. MSG is located at 0
longitude and latitude, and thus its viewing angle to the surface in the area of Europe is slant. In contrast, pyranometers are standing at the surface and only measure the radiation above them. Furthermore, we are comparing point observations with area integrals of approximately 16 km
(in the area of Germany). This is especially difficult if there are sub-pixel scattered clouds. These effects add uncertainties that are not caused by shortcomings of the nowcasting method. So, in some cases the value of the ground station does not seem to fit to the forecasted radiation but this could be either an artifact of the geometry of the satellite or the comparison of point observations with areas.
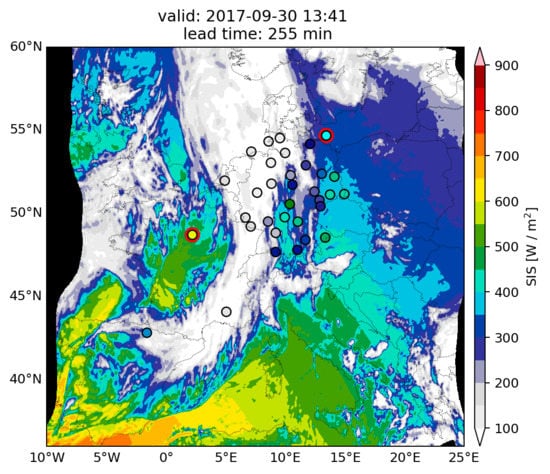
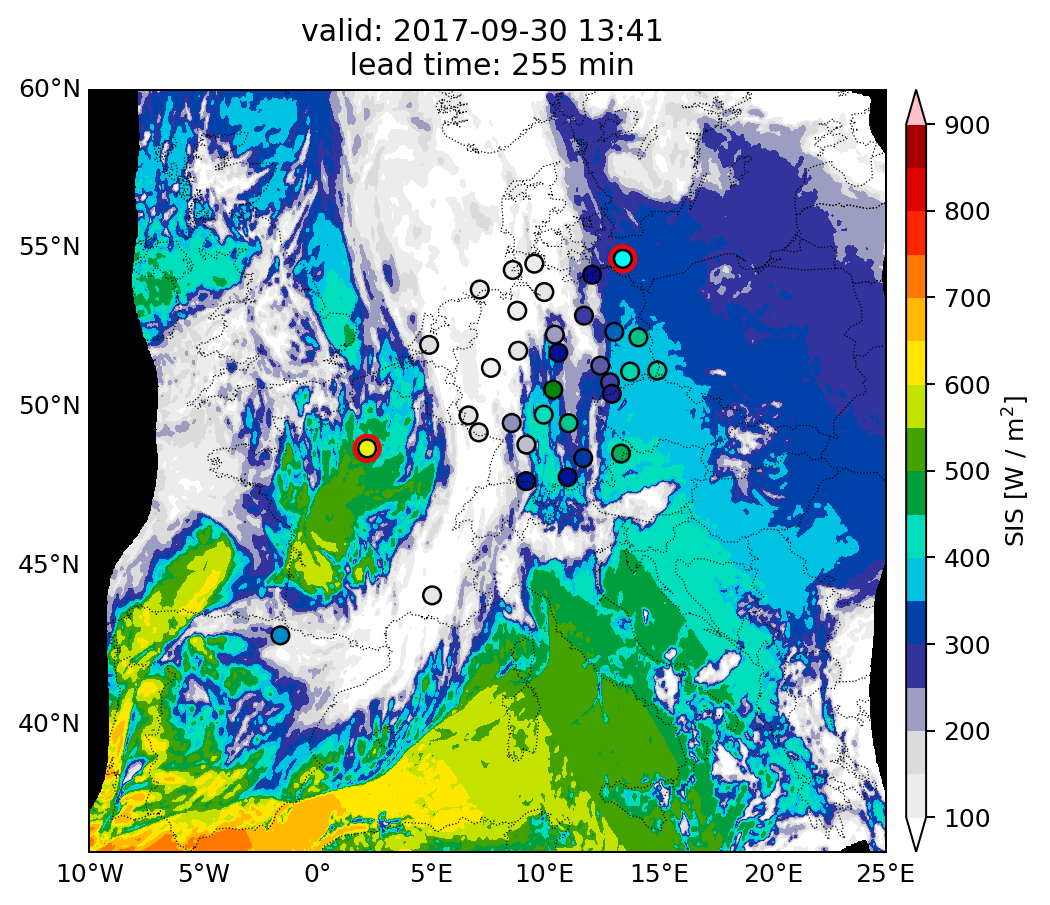
Figure 7b shows the same content as in
Figure 7a for 30 September 2017. Again, the inward moving edge on the left side of the figure can be observed. The agreement of the stations and the nowcasting is not as good as in the
Figure 7a of 29 August 2017. The station of Palaiseau (marked by a red circle) shows higher values than the nowcasting. Even in the surrounding area such high values between 600 and 650 W/m
cannot be found. The same can be observed for the station of Arkona (marked by a red circle), which also measured values between 400 and 450 W/m
however the nowcasting shows values below 350 W/m
.
The error measures of the validation with ground stations are depicted in
Figure 8. Displayed is the mean of all 17 cases against forecast time for the area of Europe. The corresponding solar surface irradiance value of the nowcasting (red), as well as the one of the ground stations (blue) is plotted against forecast time for overall 480 min. We only selected the satellite pixels of the nowcasting that corresponded to a pixel of a ground station. Although it is a common approach to take the mean of a
pixel area around the pixel of the ground station, we decided to take only one pixel to achieve a realistic error measure for the purpose of PV systems. This nowcasting aims to warn PV system operators of grid instability and a realistic measure of the uncertainty of our forecast is essential. With the absolute difference of the nowcasting and the observation the root mean square error (black) and absolute bias (gray) were calculated (
Figure 8a). We also calculated the respective relative errors by normalizing the absolute errors with the mean of the observed solar radiation at the surface that was measured by the pyranometers (
Figure 8b).
The solar radiation of the nowcasting shows smaller values than the ground stations until approximately 250 min. Nevertheless, both the nowcasting and the observation show a similar behavior and a decrease of solar irradiance with increasing forecast time. The decrease of SIS can be observed due to the sunset and due to the fact that we work with products from the visible channel. The curves do not significantly differ from each other, which also results in small errors for the whole nowcasting. Furthermore the RMSE does not exceed 200 W/m
. A slight maximum can be observed between 100 min and 200 min forecast time. The behavior of the error curves differs slightly from the RMSE and absolute bias in
Figure 4 where the maximum is more distinct. Furthermore, the curve in
Figure 4 shows less fluctuations but the height of the errors is on a comparable level. Nevertheless, the visual validation that can be seen in
Figure 7 shows that the solar irradiation nowcasting matches most of the pyranometers. The relative errors in
Figure 8b show the same behavior as the relative errors calculated for the validation with the SARAH-2 data in
Figure 4. Until approximately 400 min, both the relative absolute bias and the relative RMSE increase with increasing forecast time. The relative RMSE reaches higher values after 400 min of forecast time because the majority of the stations measured 0 W/m
, and certain stations did not measure any data at all. As a consequence, the stations that did measure solar radiation at the surface have a higher impact on the result. This led to a higher difference between the nowcasting and the observation, which, after Equation (
9), results in a higher relative RMSE, or even in values above 1. in addition to the rising errors after 400 min of forecast time, the height of the relative errors is in the same order as the relative errors from the SARAH-2 validation, which are displayed in
Figure 4.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}








