The Integration of Photodiode and Camera for Visible Light Positioning by Using Fixed-Lag Ensemble Kalman Smoother

 , , and
, , and
Abstract
:
1. Introduction
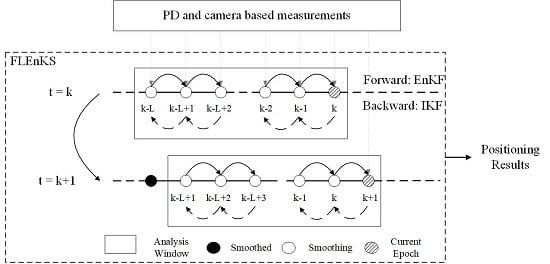
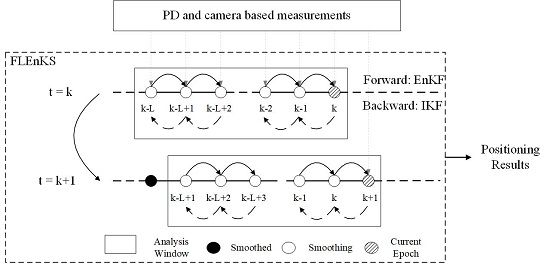
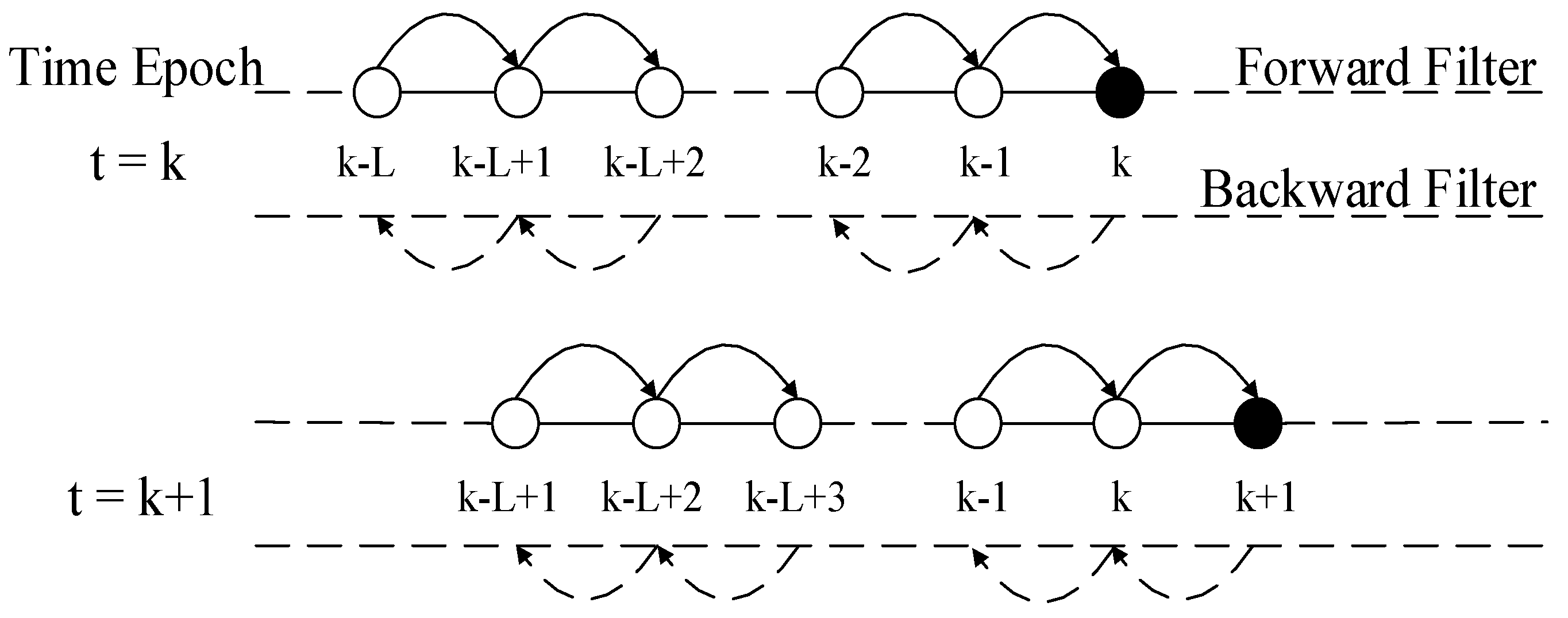
- A novel fixed-lag EnKS (FLEnKS) is proposed in this article for semi-real-time VLP. The FLEnKS uses a sliding analysis window of several points to realize semi-real-time positioning. Besides, the FLEnKS applies a two-filter structure, in which a forward EnKF with Statistical Linear Regression (SLR) and a backward modified Information Kalman Filter (IKF) with error states are performed. The backward filter compensates the estimation error of the forward filter to improve accuracy. Moreover, the proposed FLEnKS adopts SLR instead of WSLR to reduce the complexity.
- The data from both photodiode (PD) and camera are fused in the proposed FLEnKS for VLP, which further improves the accuracy of the conventional VLP with a single data source. For the purpose of comparison, other fixed-lag smoothers proposed in previous articles are also implemented in this research. Compared to the existing smoothing techniques, the proposed FLEnKS provided more accurate localization solutions, especially at corners.
2. Fixed-Lag Ensemble Kalman Smoother
2.1. State-Space Model
2.2. Forward Filter
2.2.1. Initialization
2.2.2. Prediction
2.2.3. Update
2.2.4. Statistical Linearization of and
2.3. Backward Filter
2.3.1. Initialization
2.3.2. Prediction
2.3.3. Update
2.4. Smoothing
| Algorithm 1: FLEnKS (fixed-lag ensemble Kalman smoother) |
| Initialization: j=0; Initial state vector ; Covariance matrices and 1 While 2 For k = j-L:1:j 3 Calculate and by Equations (9) and (11); Calculate , , , , , and by Equations (16)–(21) // Forward filter 4 End For 5 For k = j:-1:j-L 6 Calculate and by Equations (28) and (26); // Backward filter Calculate by Equation (32) // Smoothing 7 End For 8 j = j+1 9 End While |
3. Application to Visible Lighting Positioning
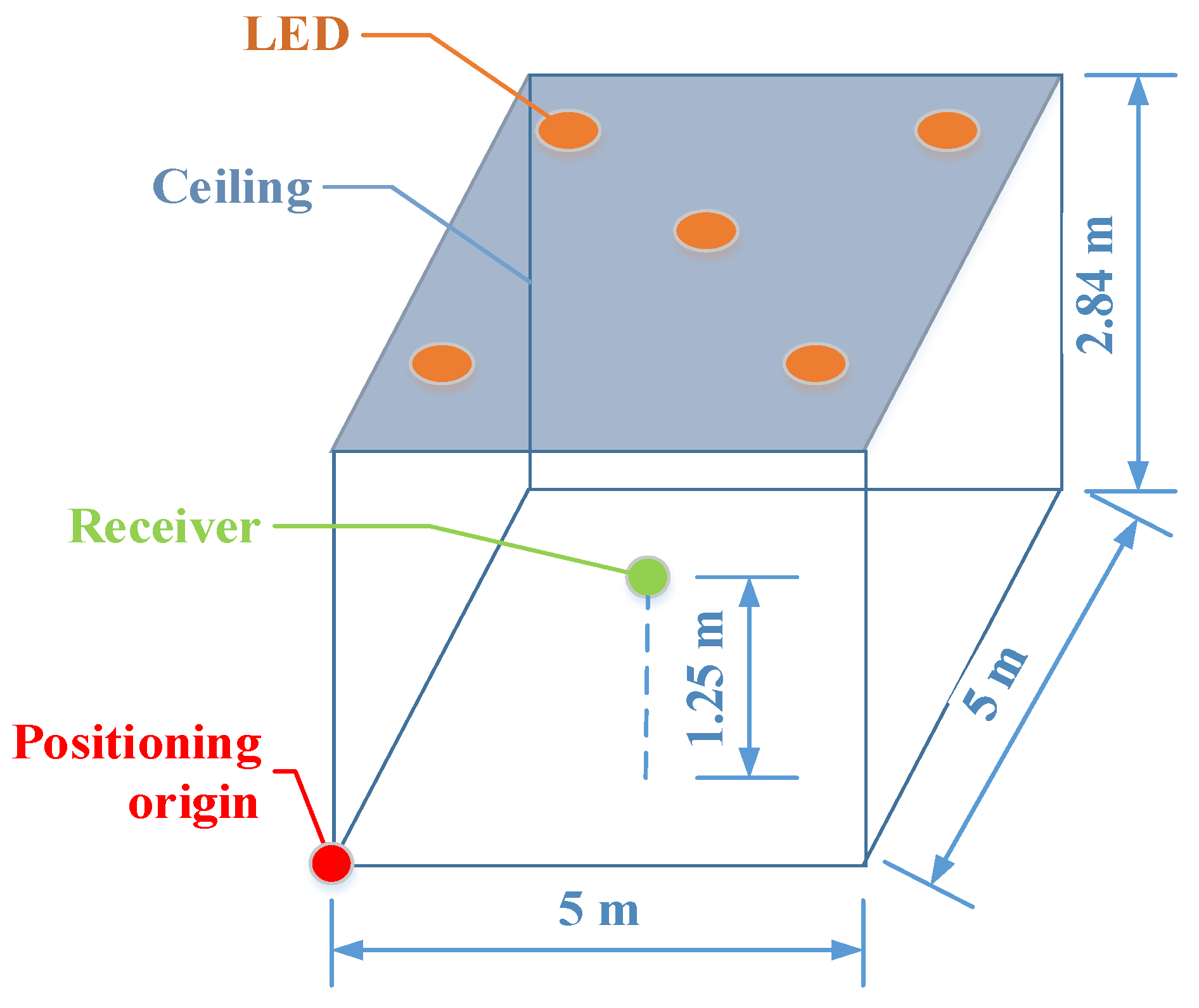
3.1. System Model
3.2. Measurement Model
4. Experiment Results and Analysis
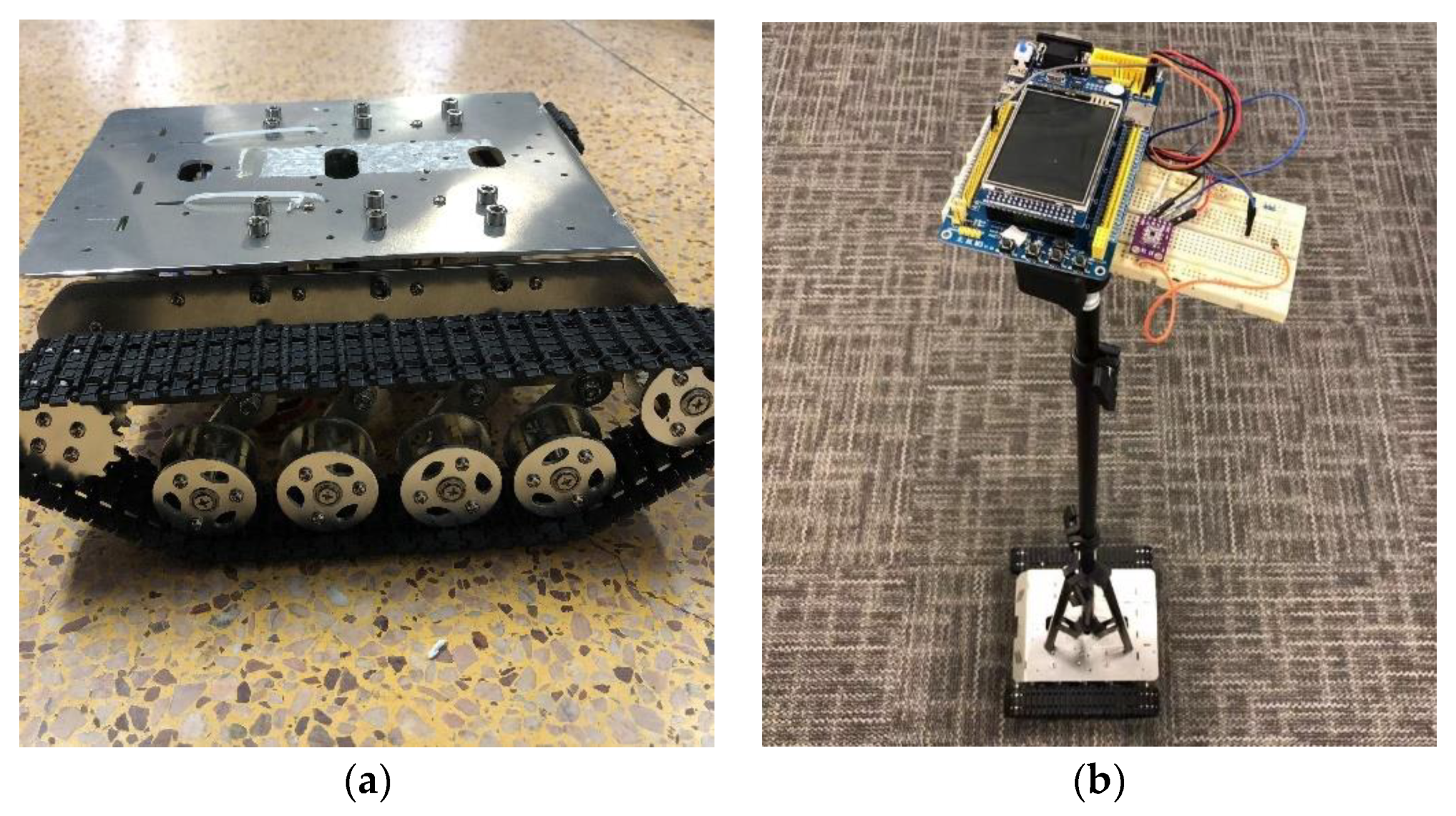
4.1. Experiment Setup
4.2. Results and Analyses
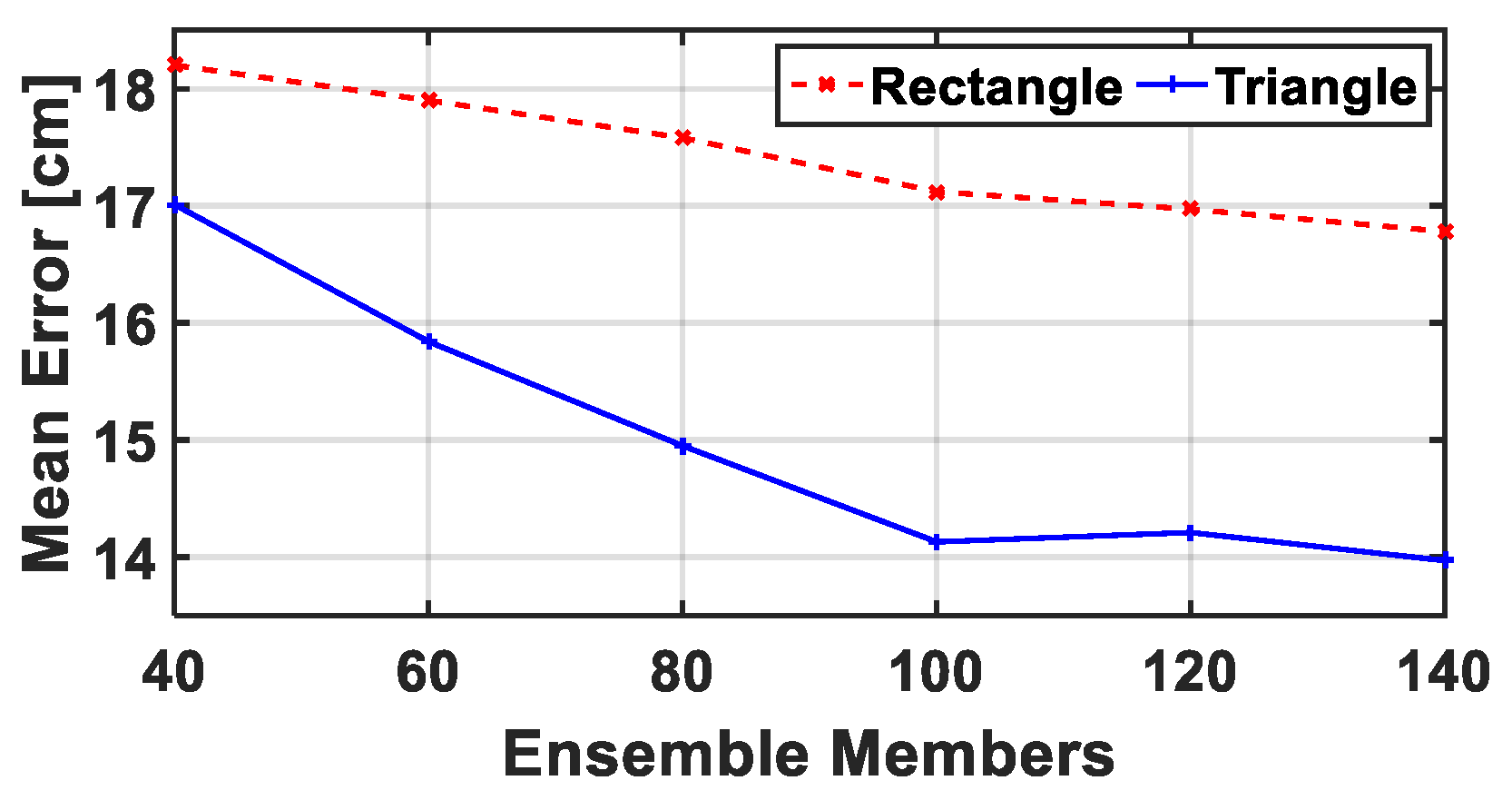
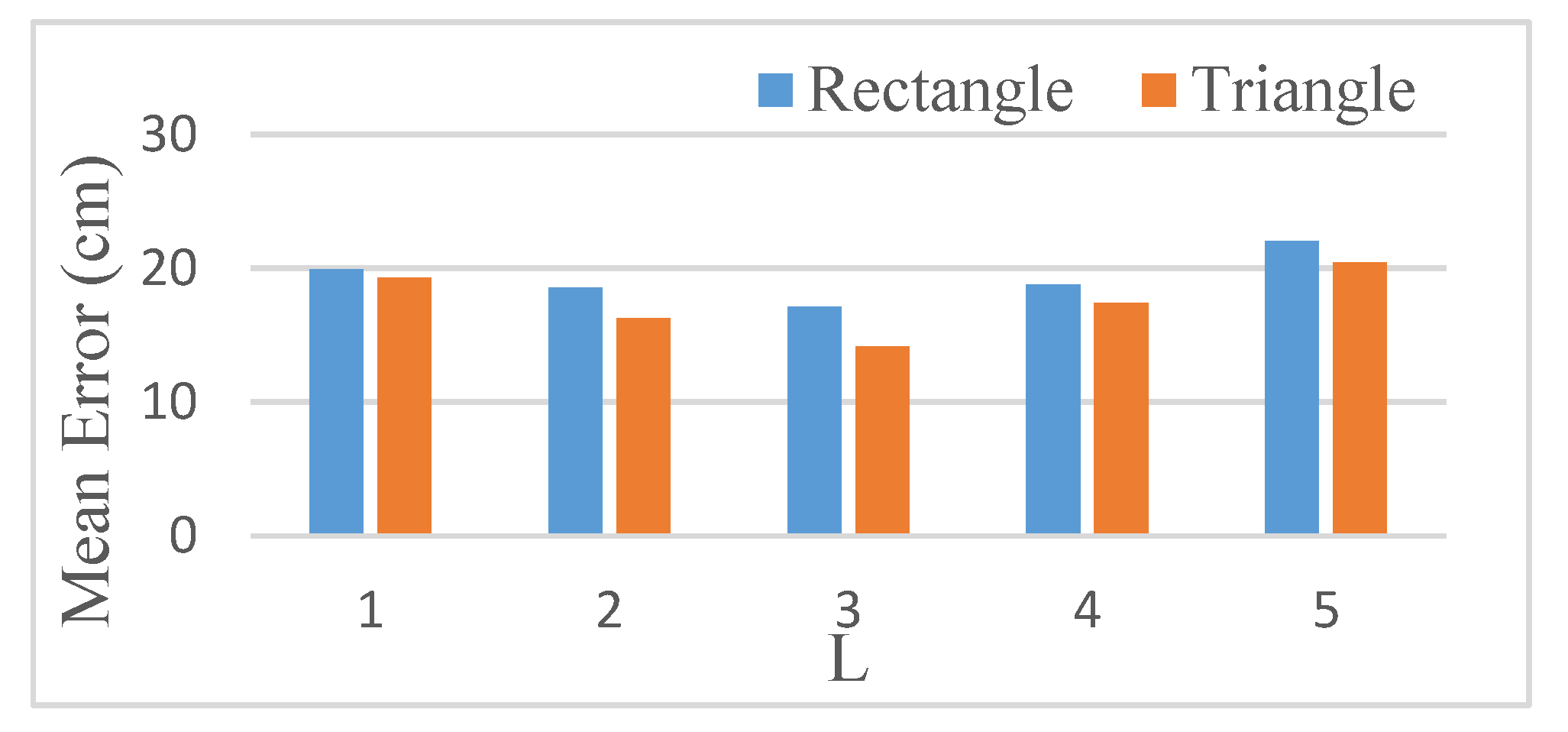
4.2.1. The Parameter Setup of FLEnKS
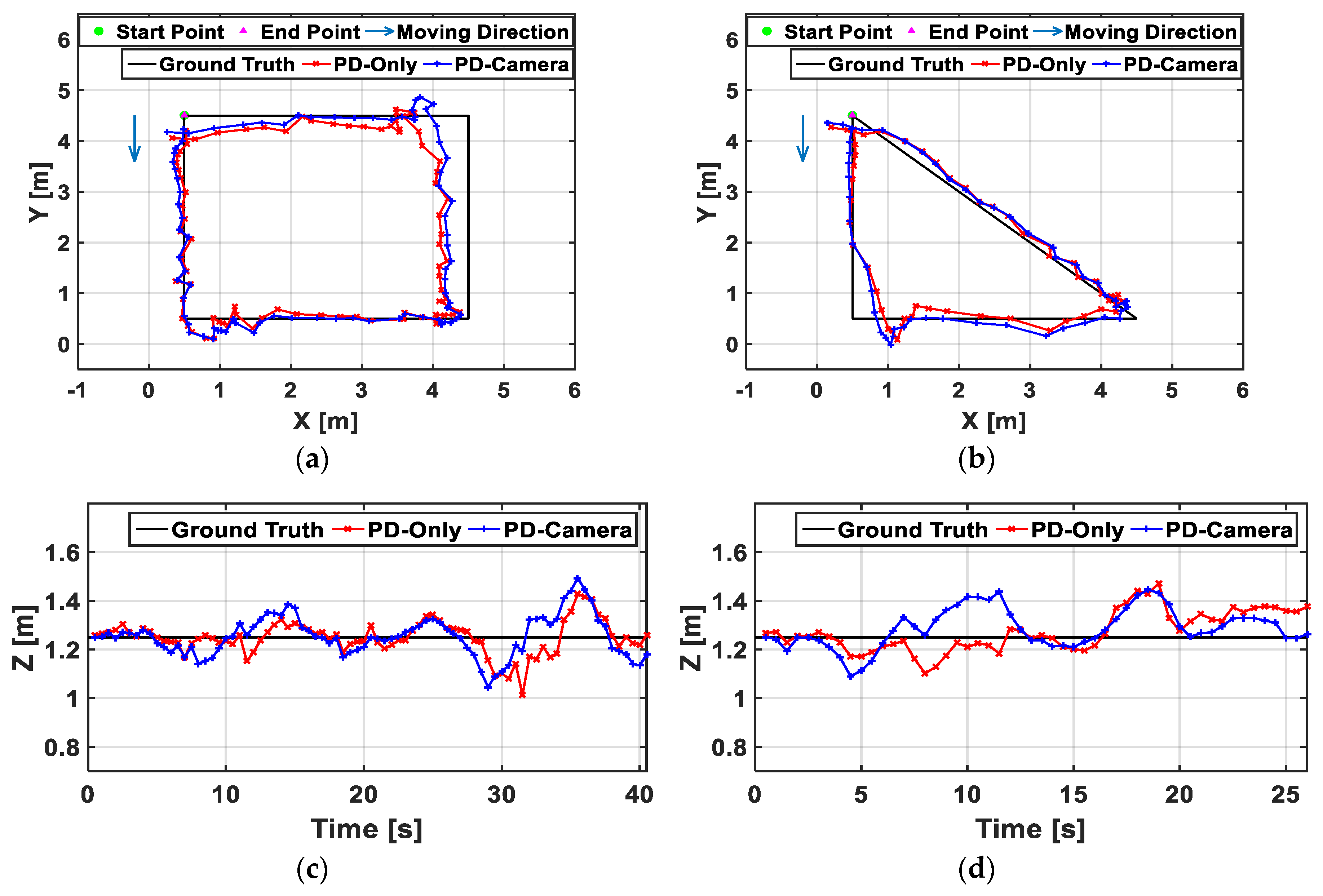
4.2.2. Comparison of PD-Only Positioning and PD–camera Data Fusion
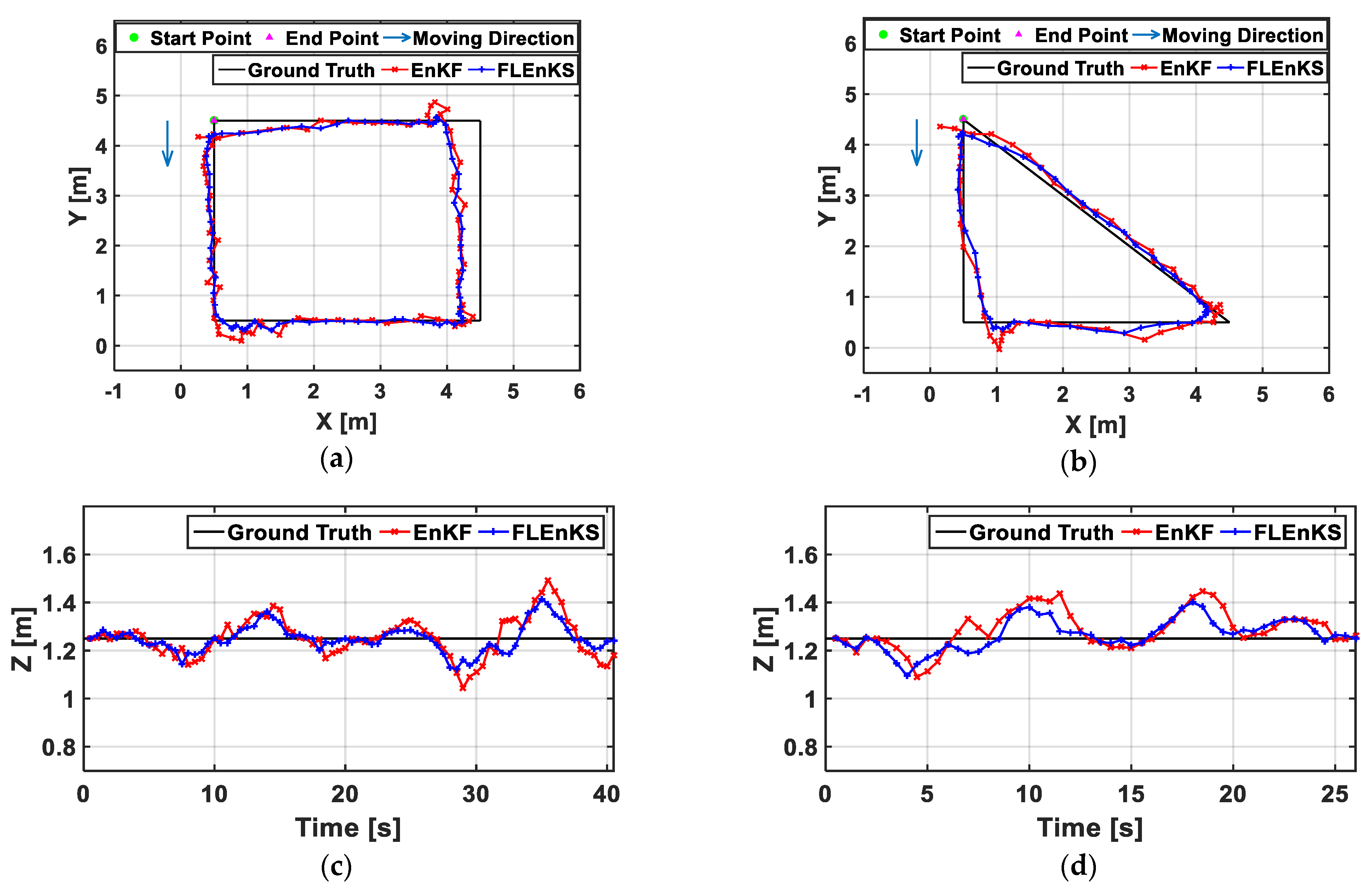
4.2.3. Comparison of EnKF and FLEnKS
4.2.4. Comparison of FLEnKS with Existing Fixed-lag Smoothers
4.2.5. Evaluation of Different Speeds
4.2.6. Comparison of Existing VLP Systems
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhuang, Y.; Hua, L.; Qi, L.; Yang, J.; Cao, P.; Cao, Y.; Wu, Y.; Thompson, J.; Haas, H. A Survey of Positioning Systems Using Visible LED Lights. IEEE Commun. Surv. Tutor. 2018, 20, 1963–1988. [Google Scholar] [CrossRef] [Green Version]
- Zhou, B.; Lau, V.; Chen, Q.; Cao, Y. Simultaneous Positioning and Orientating for Visible Light Communications: Algorithm Design and Performance Analysis. IEEE Trans. Veh. Technol. 2018, 67, 11790–11804. [Google Scholar] [CrossRef]
- Zhuang, Y.; El-Sheimy, N. Tightly-coupled integration of WiFi and MEMS sensors on handheld devices for indoor pedestrian navigation. IEEE Sens. J. 2016, 16, 224–234. [Google Scholar] [CrossRef]
- Xu, Y.; Tian, G.; Chen, X. Enhancing INS/UWB Integrated Position Estimation Using Federated EFIR Filtering. IEEE Access 2018, 6, 64461–64469. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yang, J.; Qi, L.; Li, Y.; Cao, Y.; El-Sheimy, N. A Pervasive Integration Platform of Low-Cost MEMS Sensors and Wireless Signals for Indoor Localization. IEEE Internet Things J. 2017, 5, 4616–4631. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Lan, H.; Zhang, P.; Niu, X.; El-Sheimy, N. Self-Contained Indoor Pedestrian Navigation Using Smartphone Sensors and Magnetic Features. IEEE Sens. J. 2016, 16, 7173–7182. [Google Scholar] [CrossRef]
- Li, Y.; He, Z.; Gao, Z.; Zhuang, Y.; Shi, C.; El-Sheimy, N. Toward Robust Crowdsourcing-Based Localization: A Fingerprinting Accuracy Indicator Enhanced Wireless/Magnetic/Inertial Integration Approach. IEEE Internet Things J. 2019, 6, 3585–3600. [Google Scholar] [CrossRef]
- Nassar, S.; Niu, X.; El-Sheimy, N. Land-vehicle INS/GPS accurate positioning during GPS signal blockage periods. J. Surv. Eng. 2007, 133, 134–143. [Google Scholar] [CrossRef]
- Zhuang, Y.; Wang, Q.; Shi, M.; Cao, P.; Qi, L.; Yang, J. Low-Power Centimeter-Level Localization for Indoor Mobile Robots Based on Ensemble Kalman Smoother Using Received Signal Strength. IEEE Internet Things J. 2019. [Google Scholar] [CrossRef]
- Bruhwiler, L.; Michalak, A.; Peters, W.; Baker, D.; Tans, P. An improved Kalman Smoother for atmospheric inversions. Atmos. Chem. Phys. 2005, 5, 2691–2702. [Google Scholar] [CrossRef] [Green Version]
- Cosme, E.; Verron, J.; Brasseur, P.; Blum, J.; Auroux, D. Smoothing Problems in a Bayesian Framework and Their Linear Gaussian Solutions. Mon. Weather Rev. 2010, 140, 683–695. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, X.; Li, Q. Autonomous Integrated Navigation for Indoor Robots Utilizing On-Line Iterated Extended Rauch-Tung-Striebel Smoothing. Sensors 2013, 13, 15937–15953. [Google Scholar] [CrossRef] [Green Version]
- Paul, A.S.; Wan, E.A. RSSI-Based Indoor Localization and Tracking Using Sigma-Point Kalman Smoothers. IEEE J. Sel. Top. Signal Process. 2009, 3, 860–873. [Google Scholar] [CrossRef]
- Merwe, R.; Wan, E. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. In Proceedings of the Workshop on Advances in Machine Learning, Montreal, QC, Canada, 8–11 June 2003. [Google Scholar]
- Guimaraes, A.G.; Fquih, B.A.E.; Desbouvries, F. A fixed-lag particle smoothing algorithm for the blind turbo equalization of time-varying channels. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, NV, USA, 31 March–4 April 2008; pp. 2917–2920. [Google Scholar]
- Cosme, E.; Brankart, J.M.; Verron, J.; Brasseur, P.; Krysta, M. Implementation of a reduced rank square-root smoother for high resolution ocean data assimilation. Ocean Model. 2010, 33, 87–100. [Google Scholar] [CrossRef]
- Gupta, S.D. A Comparative Study of the Particle Filter and the Ensemble Kalman Filter. Master’s Thesis, University of Waterloo, Waterloo, ON, Canada, 2009. [Google Scholar]
- Merwe, R.V.D. Sigma-Point Kalman Filters for Probabilistic Inference in Dynamic State-Space Models. Ph.D. Thesis, Oregon Health & Science University, Portland, OR, USA, 2004. [Google Scholar]
- Liu, H.; Nassar, S.; El-Sheimy, N. Two-Filter Smoothing for Accurate INS/GPS Land-Vehicle Navigation in Urban Centers. IEEE Trans. Veh. Technol. 2010, 59, 4256–4267. [Google Scholar] [CrossRef]
- Gong, X.; Zhang, J.; Fang, J. A Modified Nonlinear Two-Filter Smoothing for High-Precision Airborne Integrated GPS and Inertial Navigation. IEEE Trans. Instrum. Meas. 2015, 64, 3315–3322. [Google Scholar] [CrossRef]
- Crassidis, J.L.; Junkins, J.L. Optimal Estimation of Dynamic Systems; Chapman Hall/CRC: Boca Raton, FL, USA, 2011. [Google Scholar]
- Saeedi, S.; Moussa, A.; Elsheimy, N. Context-Aware Personal Navigation Using Embedded Sensor Fusion in Smartphones. Sensors 2014, 14, 5742–5767. [Google Scholar] [CrossRef] [PubMed]
- Gillijns, S.; Mendoza, O.B.; Chandrasekar, J.; de Moor, B.; Bernstein, D.; Ridley, A. What is the ensemble Kalman filter and how well does it work. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Nguyen, N.T.; Nguyen, N.H.; Nguyen, V.H.; Sripimanwat, K.; Suebsomran, A. Improvement of the VLC localization method using the Extended Kalman Filter. In Proceedings of the TENCON 2014—2014 IEEE Region 10 Conference, Bangkok, Thailand, 22–25 October 2014; pp. 1–6. [Google Scholar]
- Li, L.; Hu, P.; Peng, C.; Shen, G.; Zhao, F. Epsilon: A visible light based positioning system. In Proceedings of the 11th USENIX Symposium on Networked Systems Design and Implementation (NSDI 14), Seattle, WA, USA, 2–4 April 2014; pp. 331–343. [Google Scholar]
- Yasir, M.; Ho, S.-W.; Vellambi, B.N. Indoor Positioning System Using Visible Light and Accelerometer. J. Lightwave Technol. 2014, 32, 3306–3316. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Receiver Parameters | Quantity |
|---|---|
| PD type | OPT101 |
| FOV of PD | 160 deg |
| PD area | 5.2 mm2 |
| Camera type | iPhone 5s front camera |
| FOV of camera | 63.7 deg |
| Image pixel size | 960 × 1280 px |
| Image resolution | 72 dpi |
| Trajectory | MPE | RMSE | ||||
|---|---|---|---|---|---|---|
| PD-Only (cm) | PD–Camera (cm) | Improvement | PD-Only (cm) | PD–Camera (cm) | Improvement | |
| Rectangle | 21.85 | 17.12 | 21.65% | 30.47 | 22.60 | 25.83% |
| Triangle | 17.34 | 14.13 | 18.51% | 21.54 | 17.56 | 18.48% |
| Trajectory | MPE | RMSE | ||||
|---|---|---|---|---|---|---|
| EnKF (cm) | FLEnKS (cm) | Improvement | EnKF (cm) | FLEnKS (cm) | Improvement | |
| Rectangle | 18.96 | 17.12 | 9.70% | 23.84 | 22.60 | 5.20% |
| Triangle | 16.93 | 14.13 | 16.54% | 20.63 | 17.56 | 14.88% |
| Rectangle (cm) | Triangle (cm) | Average (cm) | ||||
|---|---|---|---|---|---|---|
| MPE | RMSE | MPE | RMSE | MPE | RMSE | |
| FLEKS [11] | 23.77 | 30.66 | 23.00 | 27.50 | 23.39 | 29.08 |
| FLSPKS [13] | 22.27 | 26.89 | 19.66 | 23.28 | 20.97 | 25.09 |
| FLEnKS | 17.12 | 22.60 | 14.13 | 17.56 | 15.63 | 20.08 |
| Rectangle (cm) | Triangle (cm) | Average (cm) | ||||
|---|---|---|---|---|---|---|
| MPE | RMSE | MPE | RMSE | MPE | RMSE | |
| Fast | 18.46 | 24.50 | 14.48 | 18.26 | 16.47 | 21.38 |
| Medium | 17.12 | 22.60 | 14.13 | 17.56 | 15.63 | 20.08 |
| Slow | 16.98 | 22.98 | 13.55 | 17.58 | 15.27 | 20.28 |
| System | Experiment/Simulation | Test Bed Size | Method | Receiver | Mean Error |
|---|---|---|---|---|---|
| [24] | Simulation | 2 m × 10 m | RSS + AOA + EKF | PD array | 20 cm (2D) |
| [25] | Experiment | 3.5 m × 6.5 m | RSS | PD | 30 cm (2D) |
| [26] | Experiment | 5 m × 3 m × 3 m | RSS + AOA | PD + Accelerometer | 25 cm (3D) |
| Ours | Experiment | 5 m × 5 m × 2.84 m | RSS + FLEnKS | PD + Camera | 15.63 cm (3D) |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhuang, Y.; Wang, Q.; Li, Y.; Gao, Z.; Zhou, B.; Qi, L.; Yang, J.; Chen, R.; El-Sheimy, N. The Integration of Photodiode and Camera for Visible Light Positioning by Using Fixed-Lag Ensemble Kalman Smoother. Remote Sens. 2019, 11, 1387. https://doi.org/10.3390/rs11111387
Zhuang Y, Wang Q, Li Y, Gao Z, Zhou B, Qi L, Yang J, Chen R, El-Sheimy N. The Integration of Photodiode and Camera for Visible Light Positioning by Using Fixed-Lag Ensemble Kalman Smoother. Remote Sensing. 2019; 11(11):1387. https://doi.org/10.3390/rs11111387
Chicago/Turabian StyleZhuang, Yuan, Qin Wang, You Li, Zhouzheng Gao, Bingpeng Zhou, Longning Qi, Jun Yang, Ruizhi Chen, and Naser El-Sheimy. 2019. "The Integration of Photodiode and Camera for Visible Light Positioning by Using Fixed-Lag Ensemble Kalman Smoother" Remote Sensing 11, no. 11: 1387. https://doi.org/10.3390/rs11111387