4.2.1. Technique
Similar to SLR, a spaceborne SAR payload allows for the measurement of the 2-way signal round trip time between the sensor and the ground. Contrary to the transmission and reception of laser pulses dedicated to the pass of an individual satellite, the radar instrument illuminates a large footprint in side-looking geometry and discriminates the echoes according to the time of flight and the time of reception [
37]. Provided that the SAR image processor employs strict geometrical standards, the processing of this raw data matrix for the actual SAR image is able to accurately preserve this underlying timing information. In particular, the often used approximations that reduce computational efforts need to be avoided, for instance the simplification of the platform movement during signal transmission and signal reception, which is also known as ’stop-go’ approximation [
37].
For the TerraSAR-X mission, all these SAR-related aspects have been carefully resolved in the TerraSAR-X Multimode SAR Processor (TMSP). The processor generates well-defined level 1b radar images with each pixel referring to the time of closest approach (zero-Doppler time) and the corresponding two-way round trip time [
38,
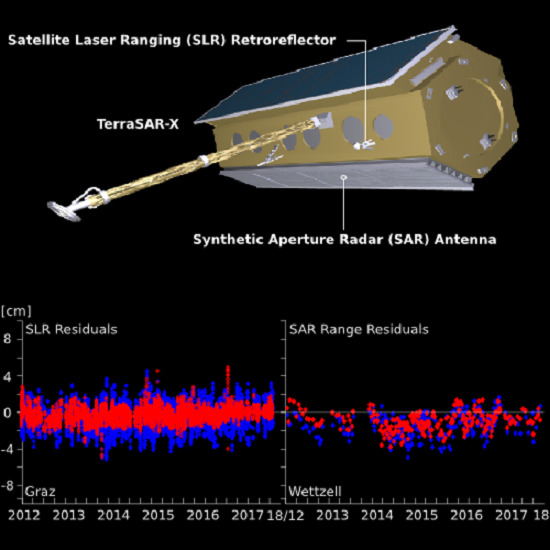
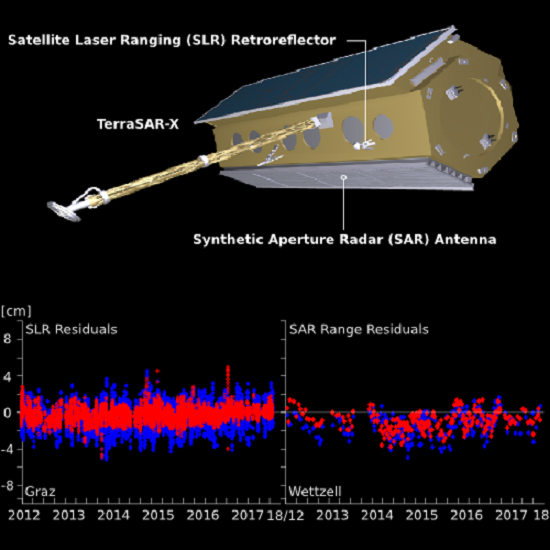
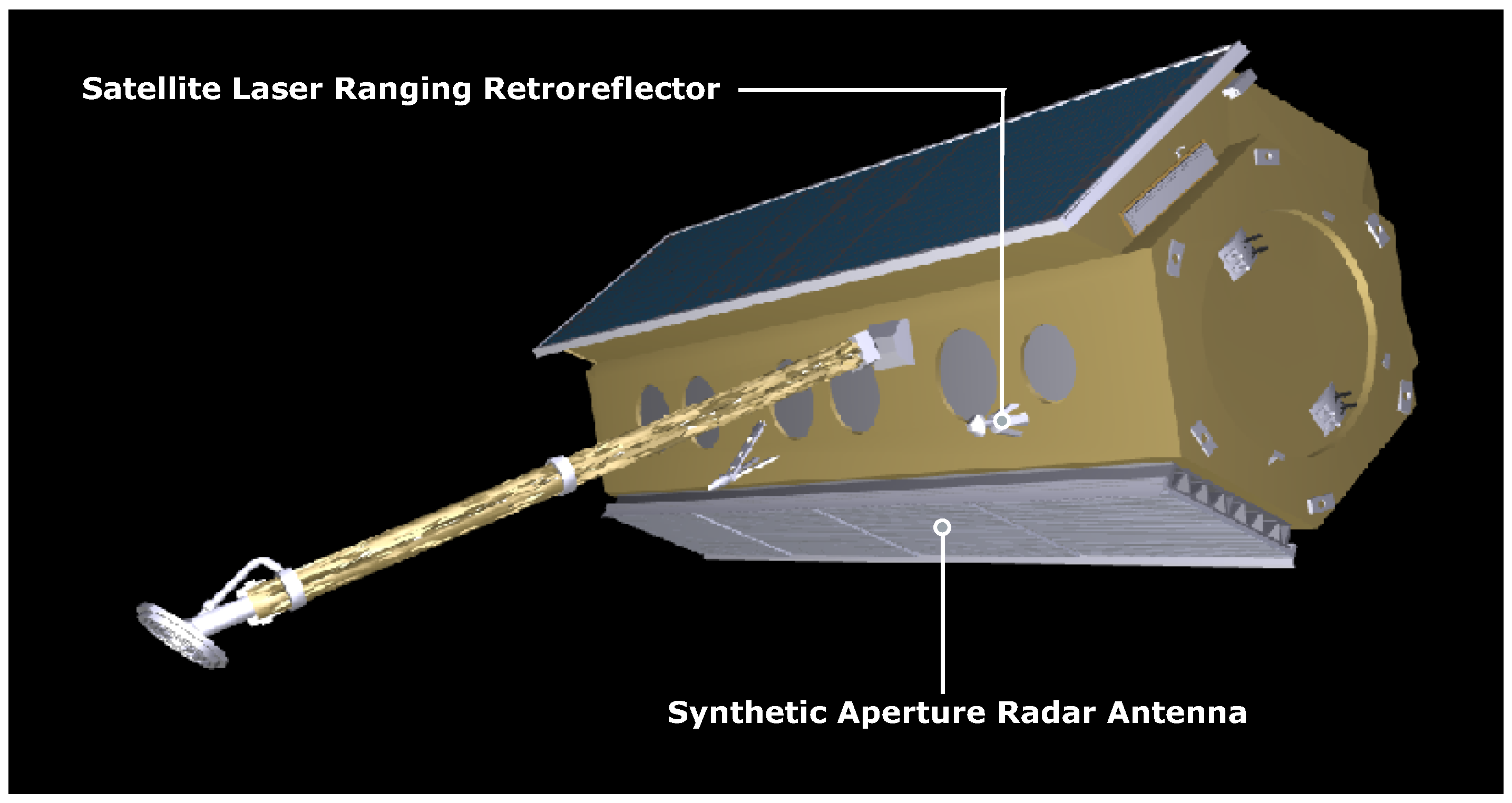
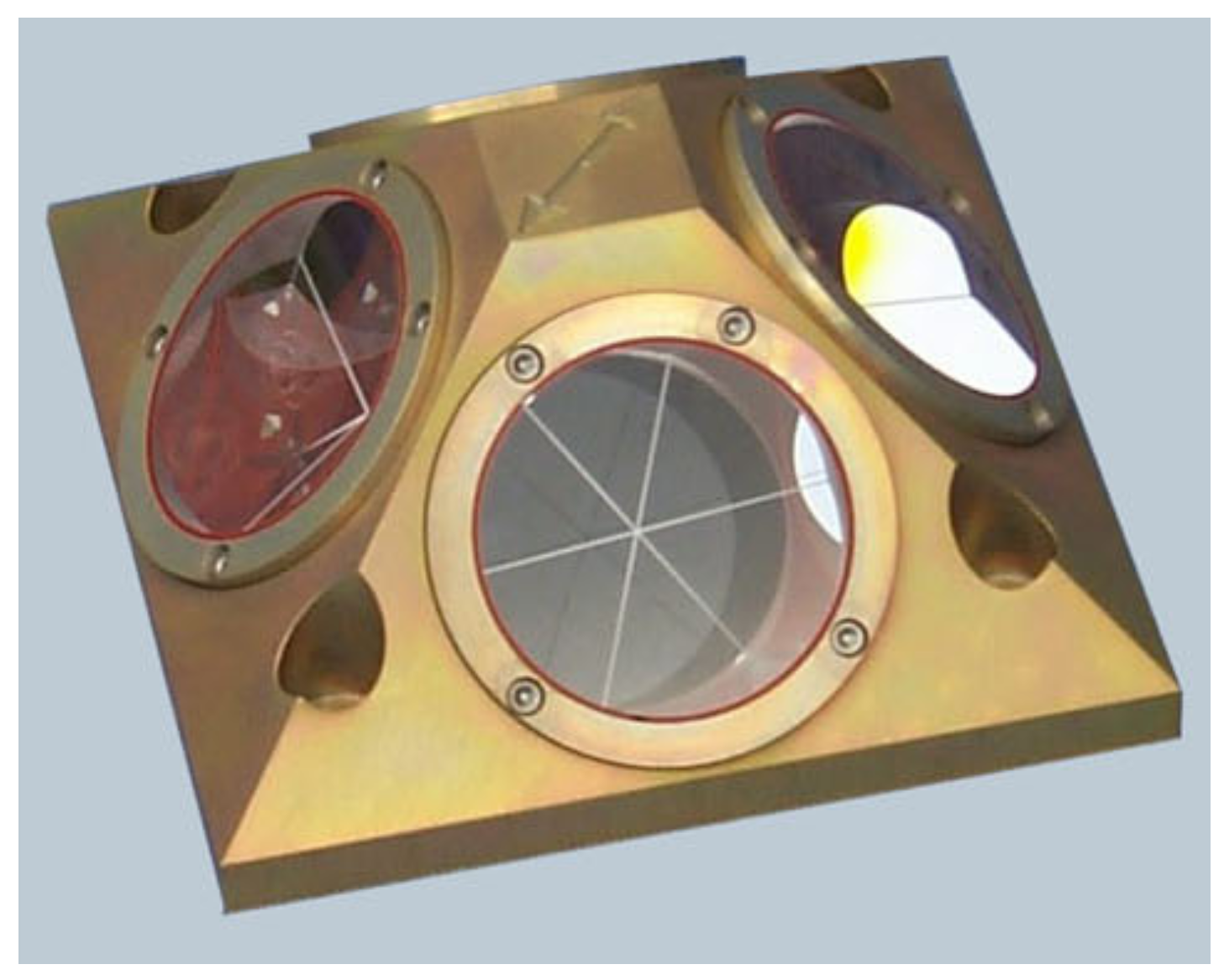
39]. In order to accurately relate this 2-D timing information to a dedicated location within the image, one may create a bright point response by placing a trihedral CR, see
Figure 5. From the SAR sensor perspective, the CR needs to be large enough to offer a strong signal return in the radar image, and it must fulfill tight limits in terms of plate orthogonality, planar surface geometries, and mechanical stability [
40]. If such a reflector is permanently installed and the reference coordinates are known in the International Terrestrial Reference Frame (ITRF, for the latest release 2014 see [
22]), then the SAR measurements may be verified on a pass by pass basis by analyzing the radar timings. As already discussed for the SLR, the terrestrial CR coordinates have to be consistent with IGb08 and IGS14 frame realizations used in the orbit determination.
In accordance with the TerraSAR-X imaging model, we use the range-Doppler equations [
37] in zero-Doppler geometry, which relate the satellite trajectory, given by the time-dependent position vector
and velocity vector
, and the reflector position vector
with the observed radar times
t and
, also referred to as slow time and fast time or azimuth and range, respectively.
The conversion of geometrical distance for the
uses the speed of light in vacuum
c. The slow time
t is linked to the satellite trajectory and can be resolved by interpolating a given orbit solution and performing an iterative search for the instant of Doppler-zero using the Equation (3). Subsequently, the corresponding round trip time
is derived from Equation (
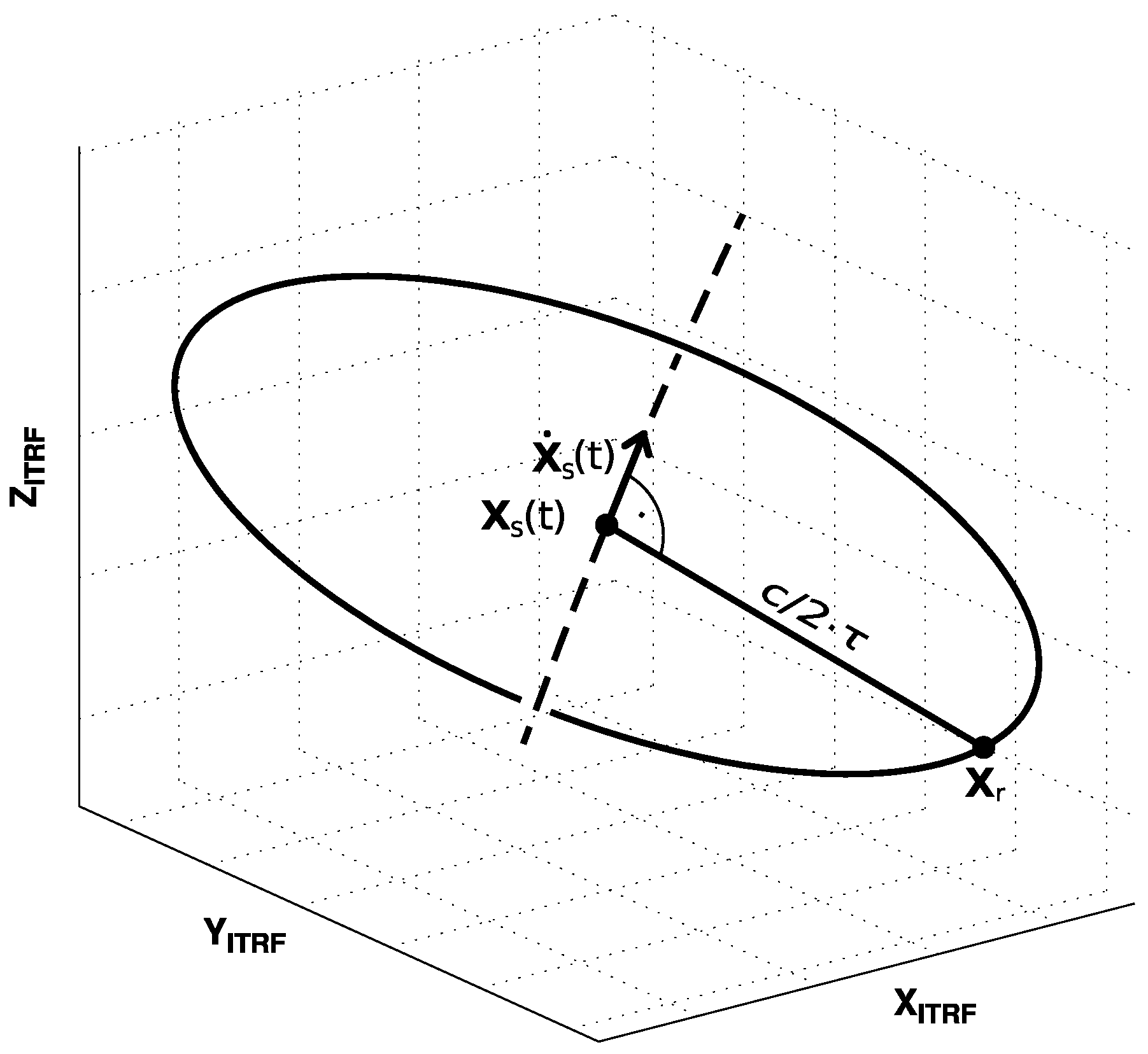
2). From a geometrical point of view, the combination of the Equations (
2) and (3) models a circle located at the satellite’s zero-Doppler position and oriented according to the zero-Doppler plane, and which intersects with the reflector position on ground, see
Figure 6.
In order to compute the reference radar times from the geometric model, the tidal-related solid Earth effects have to be taken into account when defining the
for each pass. This is identical to the modeling of SLR station coordinates or other reference markers in the ITRF, see
Section 4.1.2 and
Table 2. The details of the ITRF models that have to be applied are given in the conventions issued by the International Earth Rotation and Reference Systems Service (IERS) [
41]. We include all the models listed in chapter 7 of the conventions in our SAR analysis, and the reflector position
is corrected for the epoch of the image acquisition before computing the reference timings with the Equations (
2) and (3).
The measured radar timings are extracted from the images by performing the so-called point target analysis [
11], which detects the center of the reflector’s point signature in the image with better than
of a pixel. The precision of the extraction in range and azimuth is equivalent to the signal-to-noise ratio, or Signal to Clutter Ratio (SCR) in radar terminology, and may be expressed by [
42,
43]:
The
denotes the image resolution in range and azimuth, respectively. For the CRs with 0.7 m and 1.5 m inner leg dimension that we use in our study, see
Section 4.2.2, we determined a typical SCR of 31 dB and 46 dB for the TerraSAR-X high resolution spotlight images (0.6 m by 1.1 m resolution, [
39]) employed in the analysis. According to Equation (
4), these SCR values translate into range and azimuth precisions at the millimeter to centimeter level, see
Table 3.
Regarding the TerraSAR-X azimuth measurements, a limitation was found in the link between the GPS time provided by the secondary MosaicGNSS receiver (cf.
Section 2) and the SAR payload, but this could be improved to about 1–2 cm by exploiting the accurately known pulse repetition interval of the SAR instrument [
44]. For the range measurements, additional corrections are required for the atmospheric path delays, for which we rely on the permanently operated GNSS receivers at the geodetic stations hosting the CRs. The slant range tropospheric delay is computed from the zenith delay product provided on a daily basis by the IGS [
45], and the slant range ionospheric delay is inferred from the dual-frequency GNSS observations at the stations. The details of our methods are given in [
5]. The tropospheric products are estimated with an accuracy of better than 5 mm [
45], whereas the cross-comparison of the ionospheric delays from the two or more GNSS receivers available at each of our test sites indicate a similar 5 mm quality level for the ionospheric correction. Finally, there are the range and azimuth geometrical calibration constants of the SAR instrument, which need to be determined in dedicated experiments, as described in
Section 4.2.3.
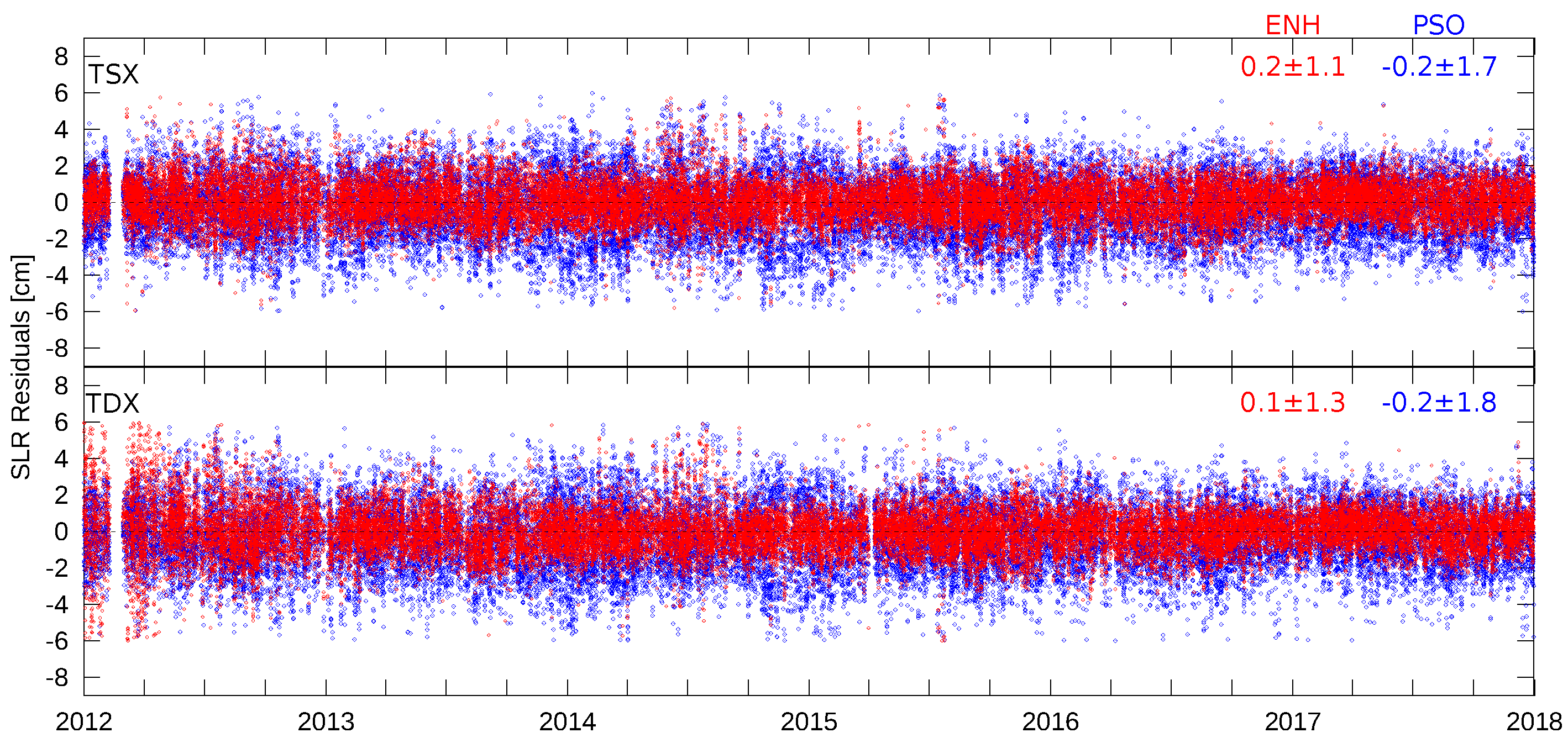
In summary, the combination of CRs with reference coordinates and the orbit solution allows for the computation of residuals in range and azimuth using the radar payload. The correction of the atmospheric path delay in the measurements and the modeling of the reference coordinates according to the geodetic conventions ensure accurate SAR-based residuals, which are also useful when testing different orbit solutions. Like in the case of SLR, the SAR residuals may be interpreted as orbital errors and can in principle be decomposed into radial, along-track and cross-track residuals [
18]. However, it has to be emphasized that the SAR provides only one range per pass, i.e., the range at the instant of zero-Doppler, and the corresponding azimuth is basically the along-track error, whereas the SLR enables the tracking of the entire pass.
4.2.2. Ground Infrastructure
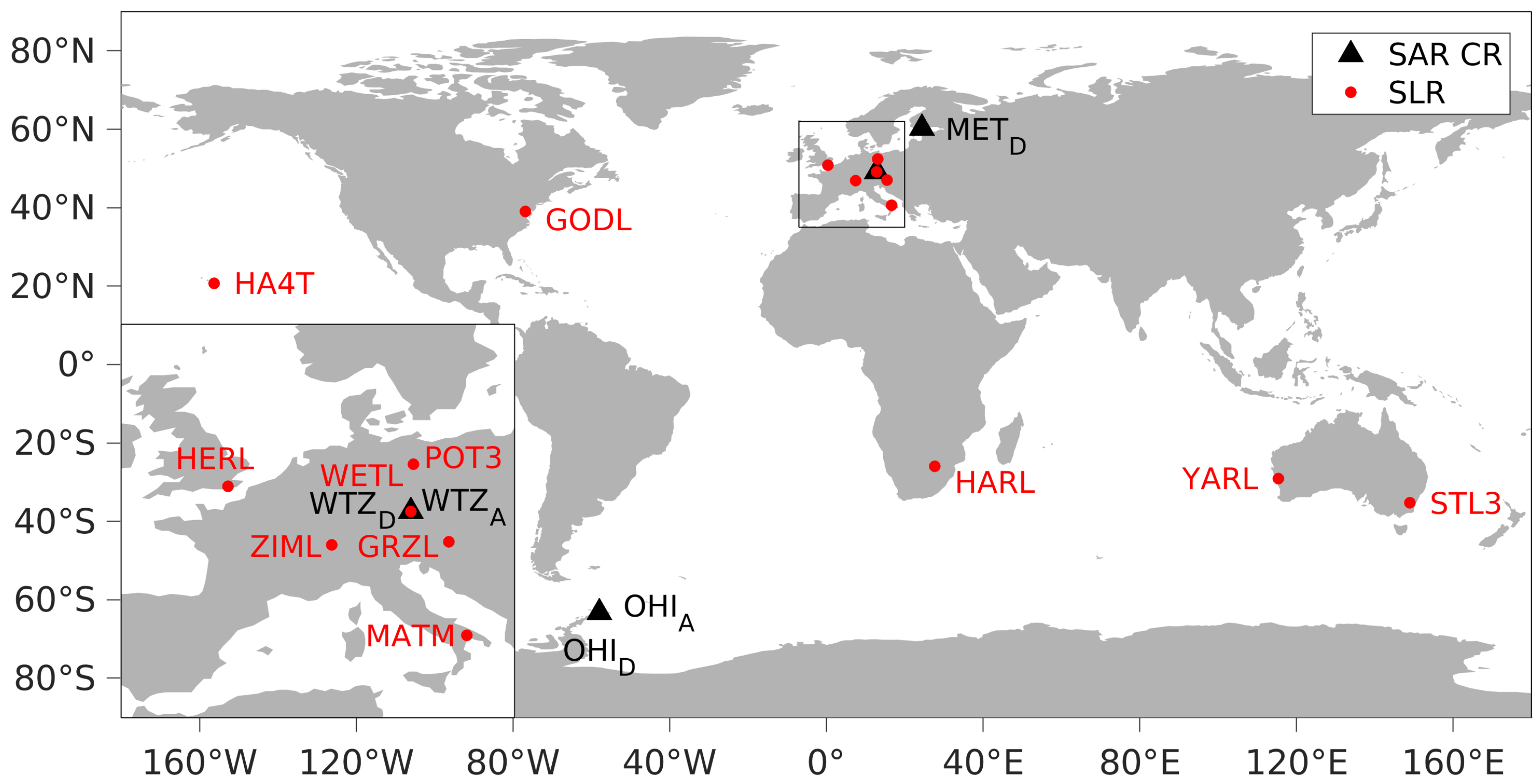
In the course of our long-term monitoring of the geometrical quality of TerraSAR-X, the three geodetic stations marked in
Figure 2 have become equipped with permanent CR installations, see
Figure 5. The Wettzell geodetic station in Germany hosts two CRs with 1.5 m inner leg dimension, with one CR aligned for the ascending passes (
) and the other CR aligned for the descending passes (
). The reflectors became available in July 2011 and October 2013, respectively. The Metsähovi geodetic station in Finland was equipped with a 1.5 m CR in October 2013 that is aligned for descending passes (
). Moreover, two CRs with 0.7 m inner leg dimension were permanently installed at the German Antarctic Receiving Station (GARS) O’Higgins in March 2012. They are oriented for ascending passes (
) and descending passes (
). All of the five CRs are linked by local ties to the reference coordinates of their respective station. The local ties have been determined in terrestrial geodetic surveys of the CR phase centers, i.e., the intersection of the three orthogonal plates. The accuracy of the local ties as reported from the surveys is better than 5 mm for each of the reflectors, and the transformation to the global ITRF, release 2008 [
46], was carried out with the dedicated transformation parameters of each station. This ensures that the ITRF reference coordinates of the CRs retain the accuracy of the local survey. For a general description of the methods to determine the local ties at geodetic stations, see for instance the example of Wettzell [
47,
48].
Repeated measurements of the local ties of the
reflector in 2011, 2012 and 2014 revealed small changes in the CR position during the first years, which were caused by soil compaction below the concrete pad supporting the reflector mount, see
Table 4. The changes occurred mostly in the vertical direction and were considered as a piece-wise linear displacement in addition to the ITRF velocity of the Wettzell station when modeling the CR reference coordinates. Beyond 2014, the reflector was determined to be stable. Because of these early experiences, a more stable ground was chosen to place the concrete pad of the second Wettzell reflector, while for the reflectors at the other stations we do not expect such secondary deformation, because there the reflector mounts are directly attached to stable bedrock.
On 29 January 2017, the IGS adopted the latest ITRF solution, namely the ITRF2014 [
22]. This frame updates results in refined coordinate solutions for all the IGS GNSS sites, which in turn affect the orbit and clock products of the GNSS constellations provided by the IGS after the aforementioned date. Consequently, the orbits of TSX and TDX also refer to the renewed ITRF2014 solution, because the IGS products are used in the reduced dynamic orbit determination, see
Table 1 and the details in [
18]. To ensure a consistent SAR data analysis beyond January 2017, the reference coordinates of all the reflectors were transformed from ITRF2008 to ITRF2014 using the official transformation parameters [
22]. The station velocities of Wettzell, GARS O’Higgins and Metsähovi required for linearly transforming the reference coordinates of the reflectors to the epoch of the SAR acquisition were also taken from the corresponding ITRF2008 and ITRF2014 solution files, which are available at the IERS [
49].
4.2.3. TerraSAR-X Image Acquisitions
From 2012 to 2017, the satellites TSX and TDX acquired in total
scenes for the five reflectors located at the geodetic stations. The imaging mode was the TerraSAR-X high resolution spotlight mode, which features an average resolution of 0.6 m by 1.1 m in slant range and azimuth, as well as a scene extent of approximately 5 km by 10 km [
39]. Out of these acquisitions, 68 scenes had to be eliminated from the processing because they were rendered unusable by snow or water in the reflectors, which significantly reduce the signal backscatter. The degraded measurements are easily detected by computing the SCR from the CR point response in the radar image, and comparing it to the average SCR of the data series. In addition, 10 scenes were eliminated because of non-final alignments of the CRs or because of gross outliers at the decimeter level in the processed SAR residuals. The remaining scenes are distributed across several pass geometries that may be identified by the incidence angle at the CR at Doppler zero, see
Table 5. Both satellites TSX and TDX captured data for all of the available reflectors, but in the case of TDX the majority of the data was acquired at GARS O’Higgins, while for TSX the data distribution across the sites is more homogeneous.
In order to center the SAR measurements and account for any unresolved biases caused by internal electronic delays of the SAR instrument, radar payloads are empirically calibrated against stable CRs with known reference coordinates. For the TerraSAR-X mission, the calibration was performed during the commissioning phase according to the initial requirements of 1 m [
39,
50], but because of our improvement in the TerraSAR-X range and azimuth measurements, we adopted the procedure to determine our own refined calibration constants for TSX and TDX [
5,
6]. The CR located at the Metsähovi station is used for this task. For the analysis presented in this study, the calibration constants were derived separately for both the standard PSOs and the enhanced orbit products, see
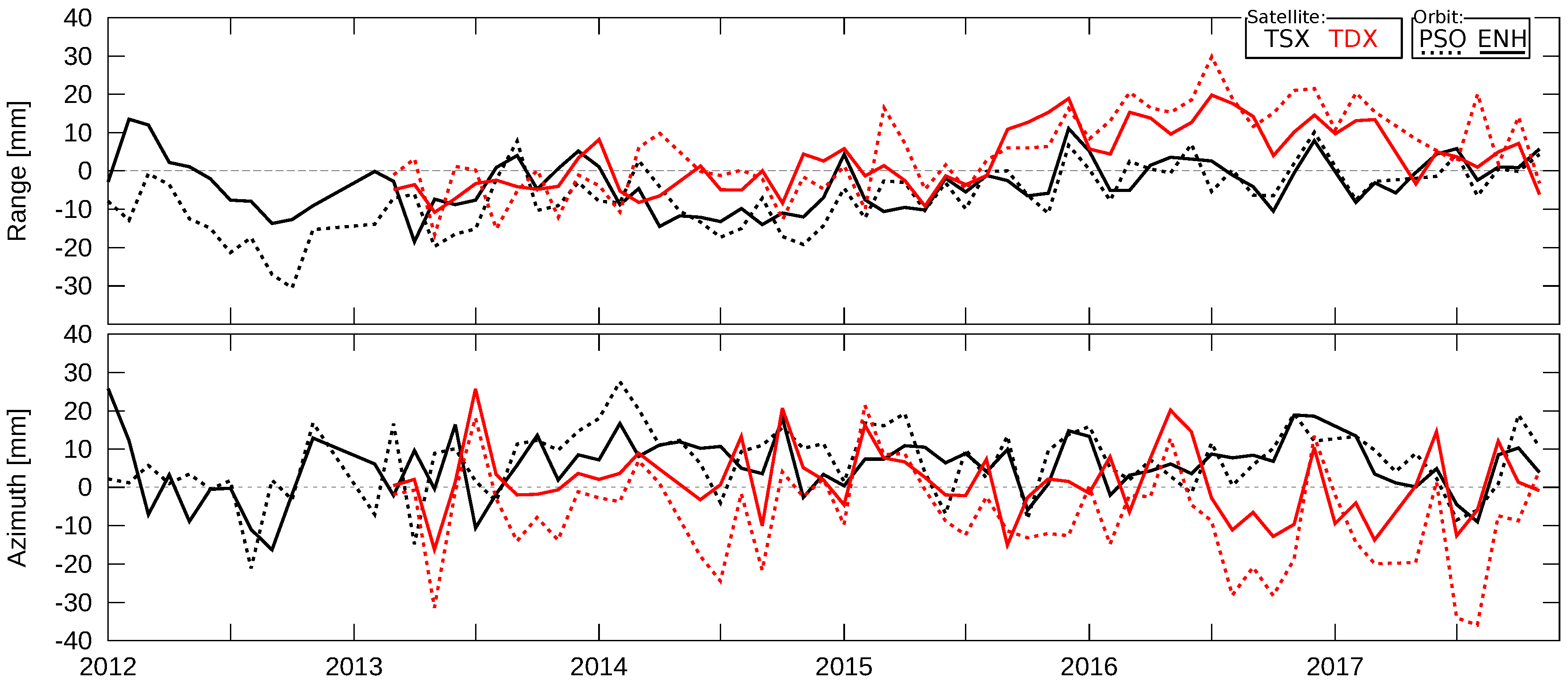
Table 6. The changes in the calibration constants caused by the enhanced orbit product become as large as 1 cm. We may conclude that other uncompensated biases, e.g. from the orbit, are included in these constants in addition to the actual electronic instrument delays. This is also the reason why we decided to redetermine these constants after we introduced the refined modeling of the TerraSAR-X radar observations, see
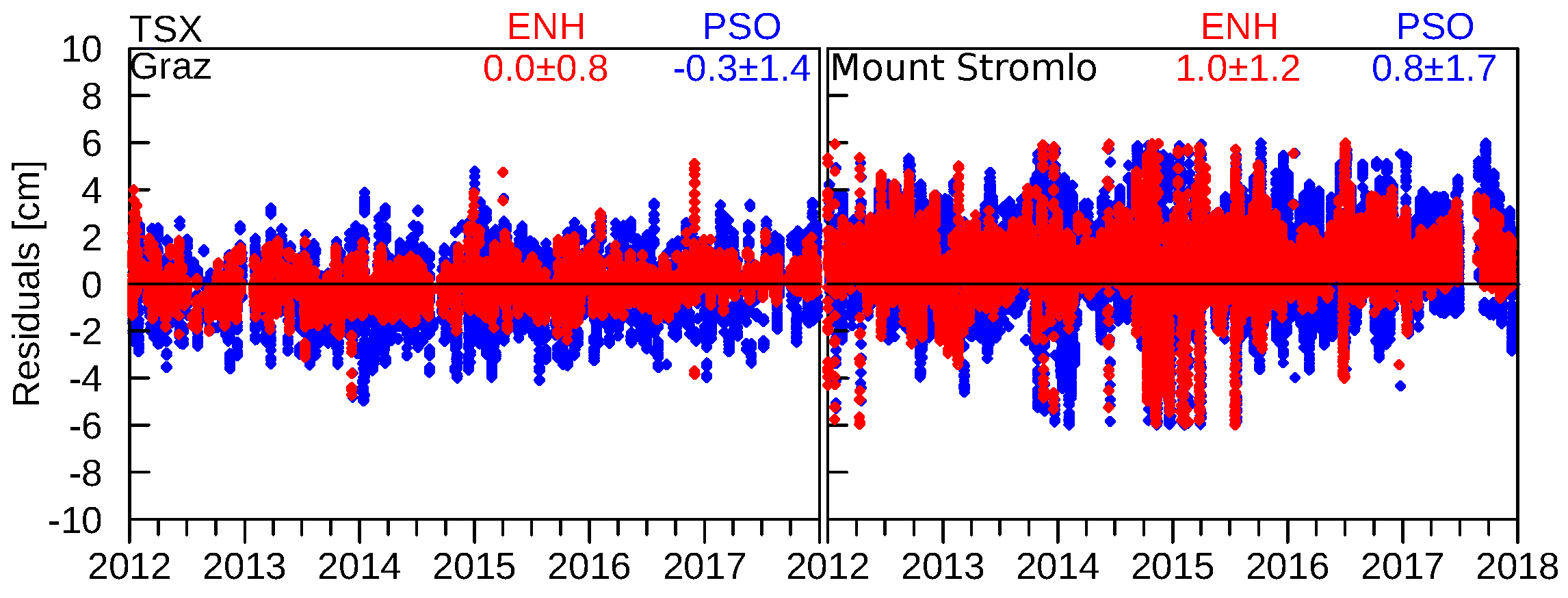
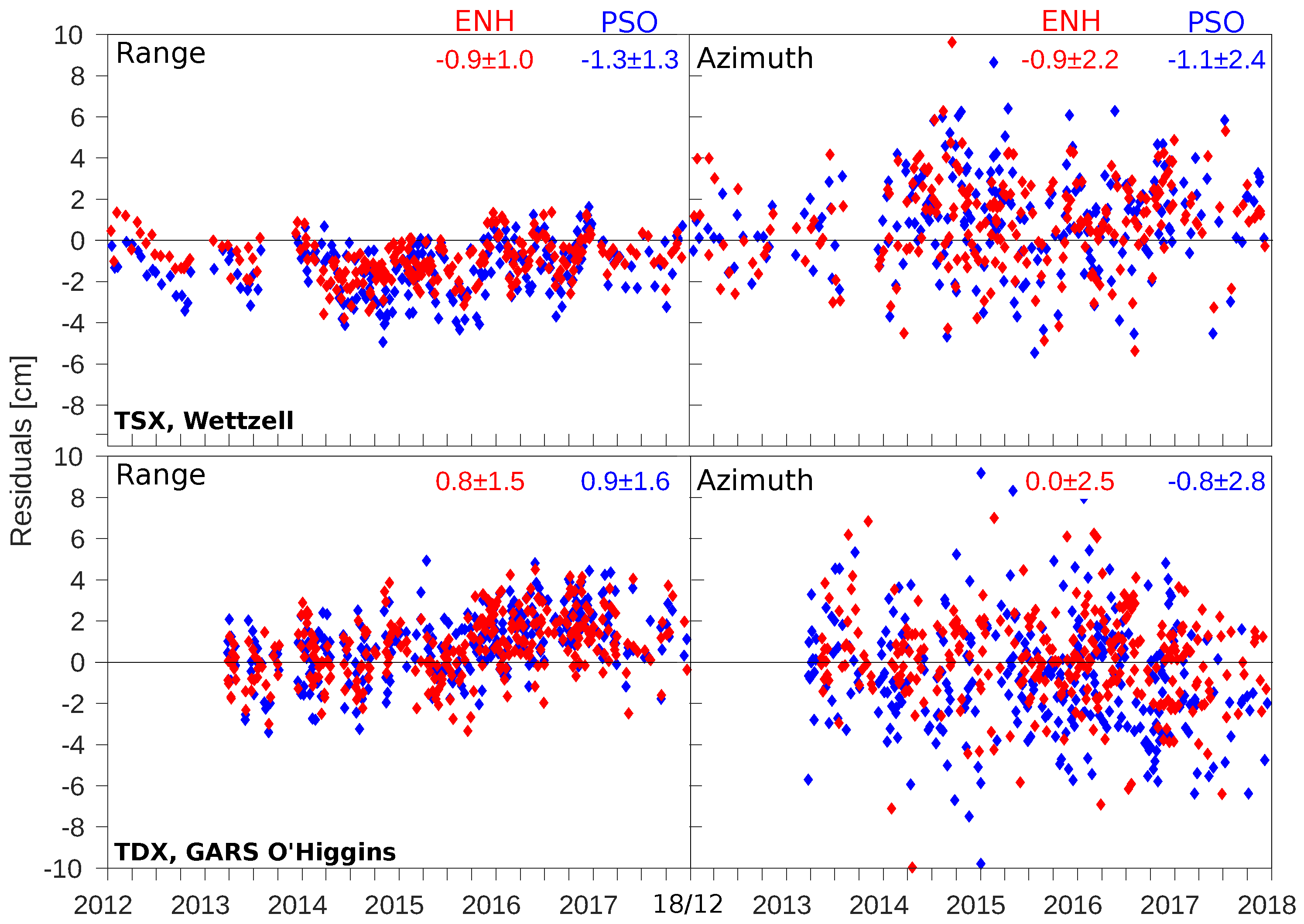
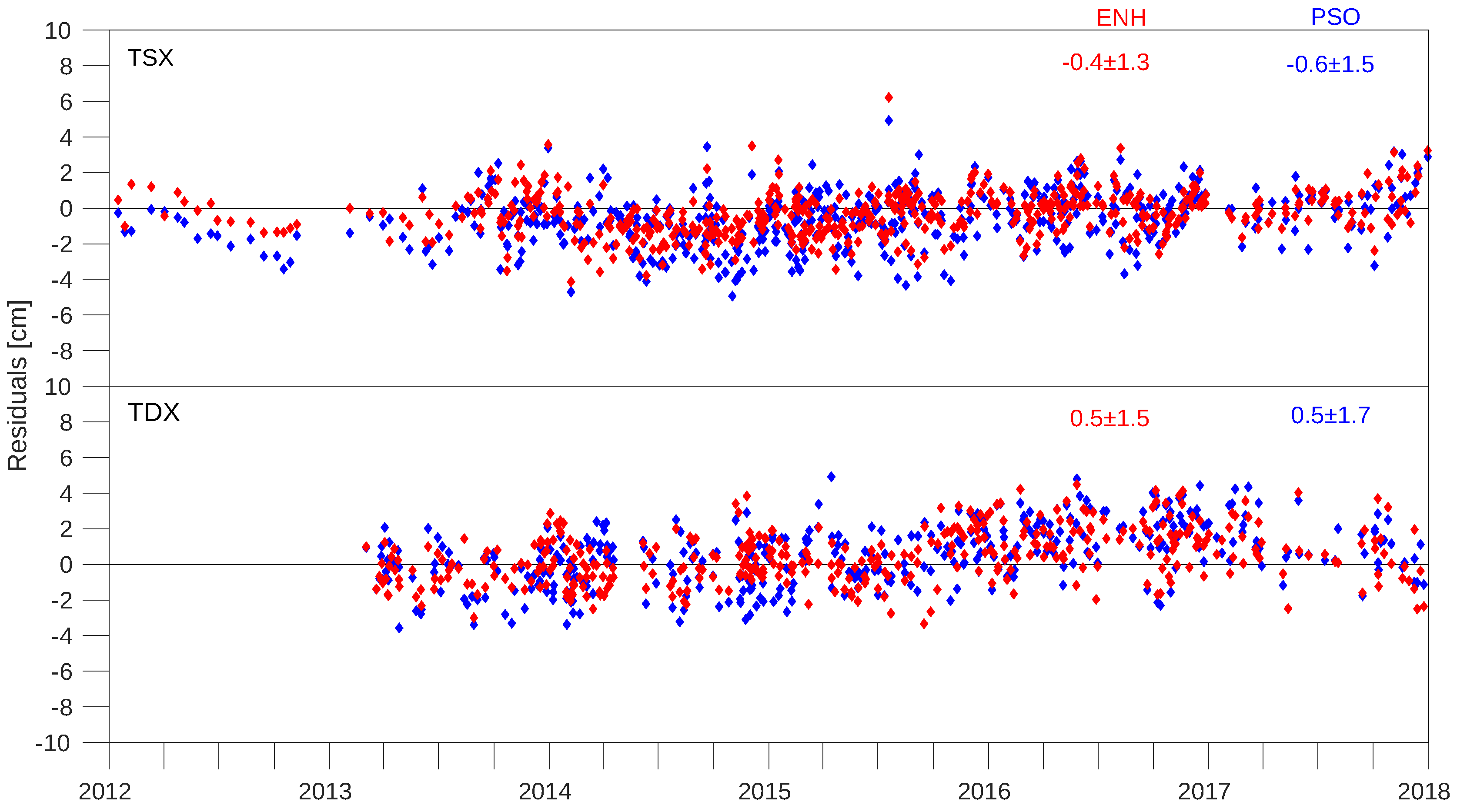
Section 4.2.1. Naturally, the remaining offset in the Metsähovi SAR residuals will become very small, but the offsets at the remaining four CRs can be used to judge the quality and the consistency of the SAR data and the two orbit products.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}