


Analysing the Effects of Scenario-Based Explanations on Automated Vehicle HMIs from Objective and Subjective Perspectives

Abstract
:1. Introduction
2. Preliminary Study of an Automated Valet Parking System
- Participants:
- In the AVP system of a highly automated vehicle, the vehicle autonomously controls the lateral and longitudinal behaviours, transforming the driver into a passenger free to engage in activities like reading or working. If the system reaches a limit, the driver is prompted to take control for a specific duration of time.
- 2.
- Background information and assumptions regarding the participants and their environment:
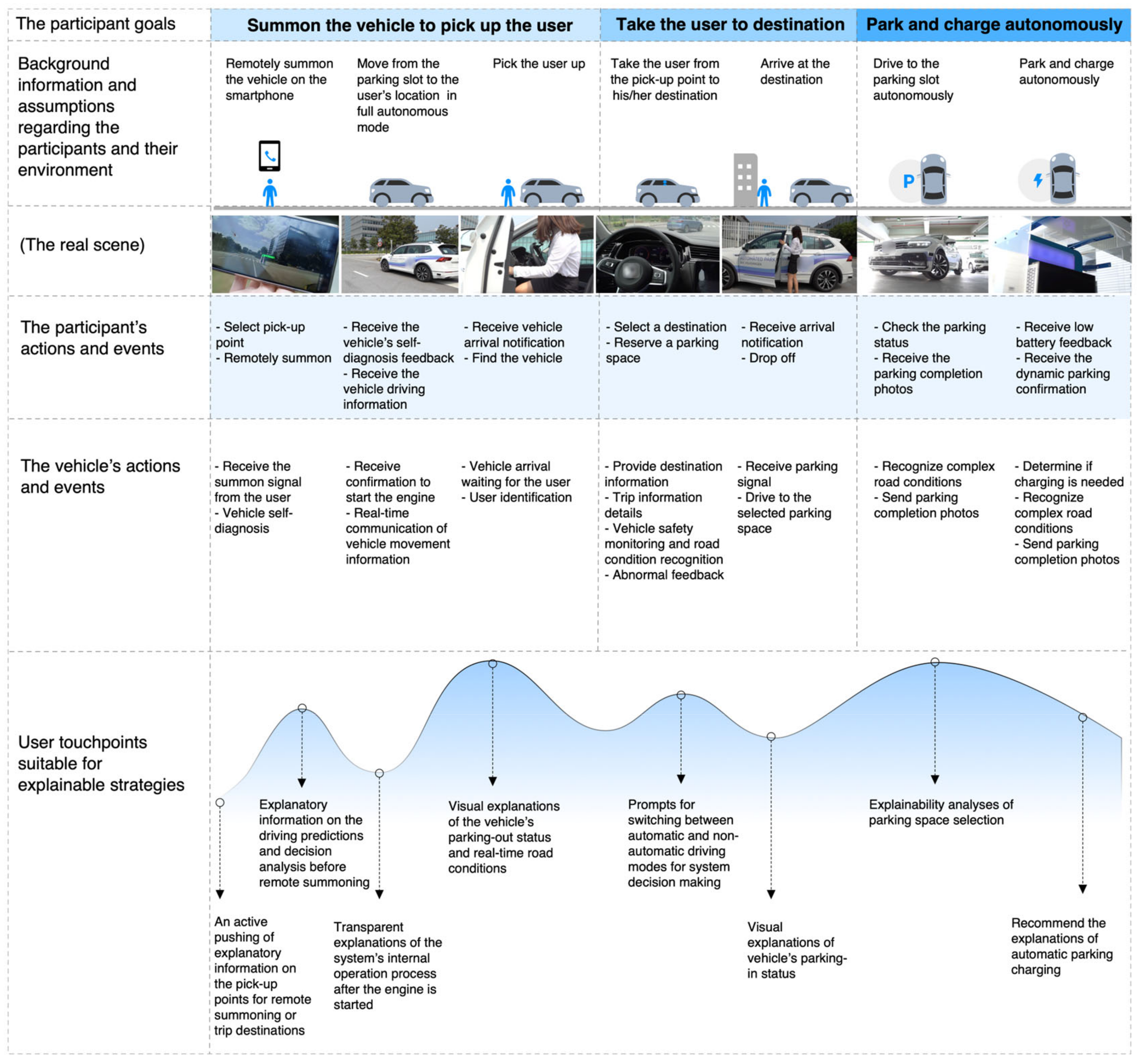
- As the role of the driver in autonomous driving changes, the usage scenarios of AVP expand beyond in-car human–machine interaction. The AVP provides safe and convenient travel while also introducing challenges related to user inadaptation. Therefore, to include the human factor in engineering, it is necessary to study highly automated vehicles that cater to diverse user needs while considering the environments in which AVs operate, and how they are used. Figure 1 visually and textually presents the background and environment in which users utilize AVPs, including summoning vehicles from any location and allowing drivers to step out of the car to monitor and control the overall parking process through their mobile phones.
- 3.
- Participant goals or objectives:
- Understanding the goals and objectives of participants is integral to tailoring the AVP system to meet diverse user needs. The basic goals include the following: summoning the vehicle to pick up the user, taking the user to a destination, self-parking, and charging.
- 4.
- The sequence of actions and events:
- A critical aspect of this framework is its focus on the sequential flow of actions and events within the AVP system. By elucidating the step-by-step journey of users interacting with the system, this focus helps explore what types of explanations users might need while using the AVP system. The primary interaction process of the system is as follows: Firstly, the user can remotely control his or her vehicle using a smartphone. When the vehicle is summoned, it leaves the parking space and automatically drives to the user’s location. After picking the user up, the vehicle drives to the destination selected by the user. At the same time, the user can choose a parking space near the destination via the in-car system; thus, some of the services of the AVP system are linked to the in-car system. When the vehicle arrives at the destination and drops the user off, the vehicle automatically drives to the garage and starts parking. From the perspective of the whole service process design, the interaction medium of the AVP system includes the mobile phone application and Human–machine Interface (HMI) in the vehicle. In addition, the interaction medium switches between different scenarios during the usage process. Therefore, the functional design and information presentation in different scenarios must be based on the corresponding user scenario and environment.
3. Experiment 1 Method
3.1. Prototypes
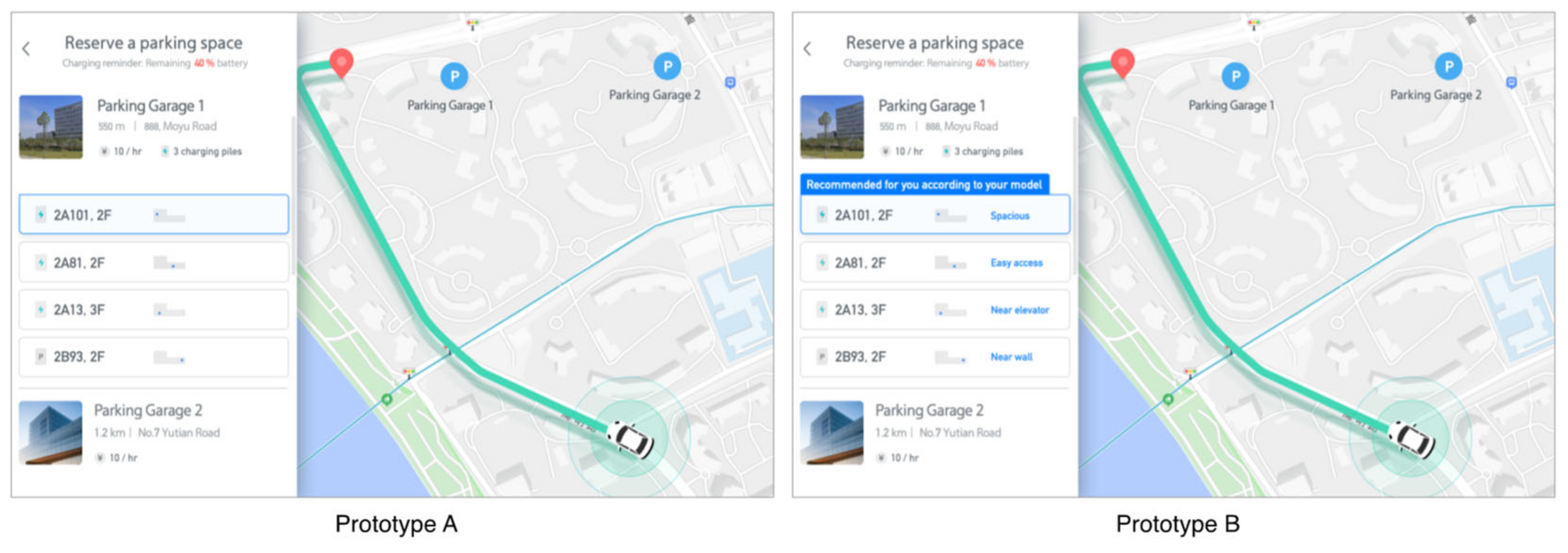
- Text with a coloured background on the screen.
- Textual information regarding how the AVP system makes decisions.
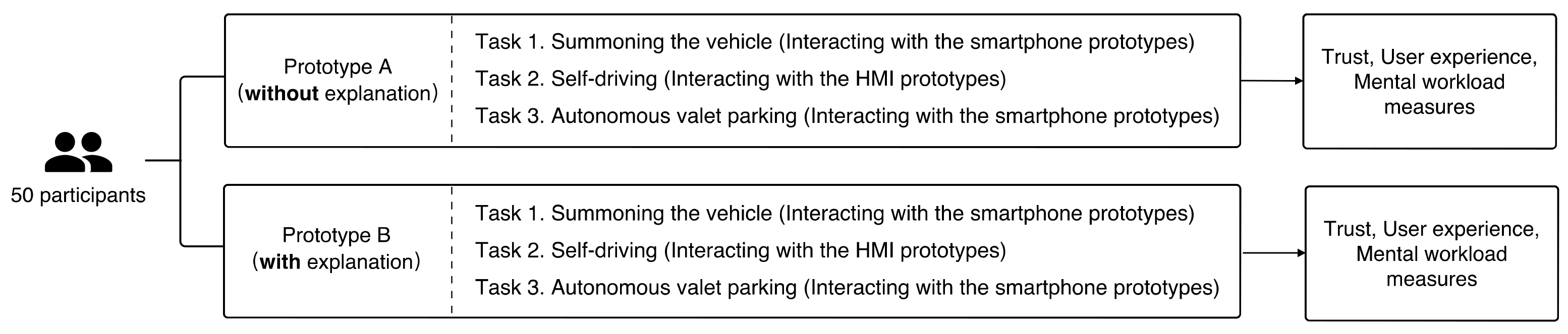
3.2. Procedures
3.3. Sample
3.4. Dependent Variables
3.5. Hypotheses
4. Experiment 1 Results
5. Experiment 2 Method
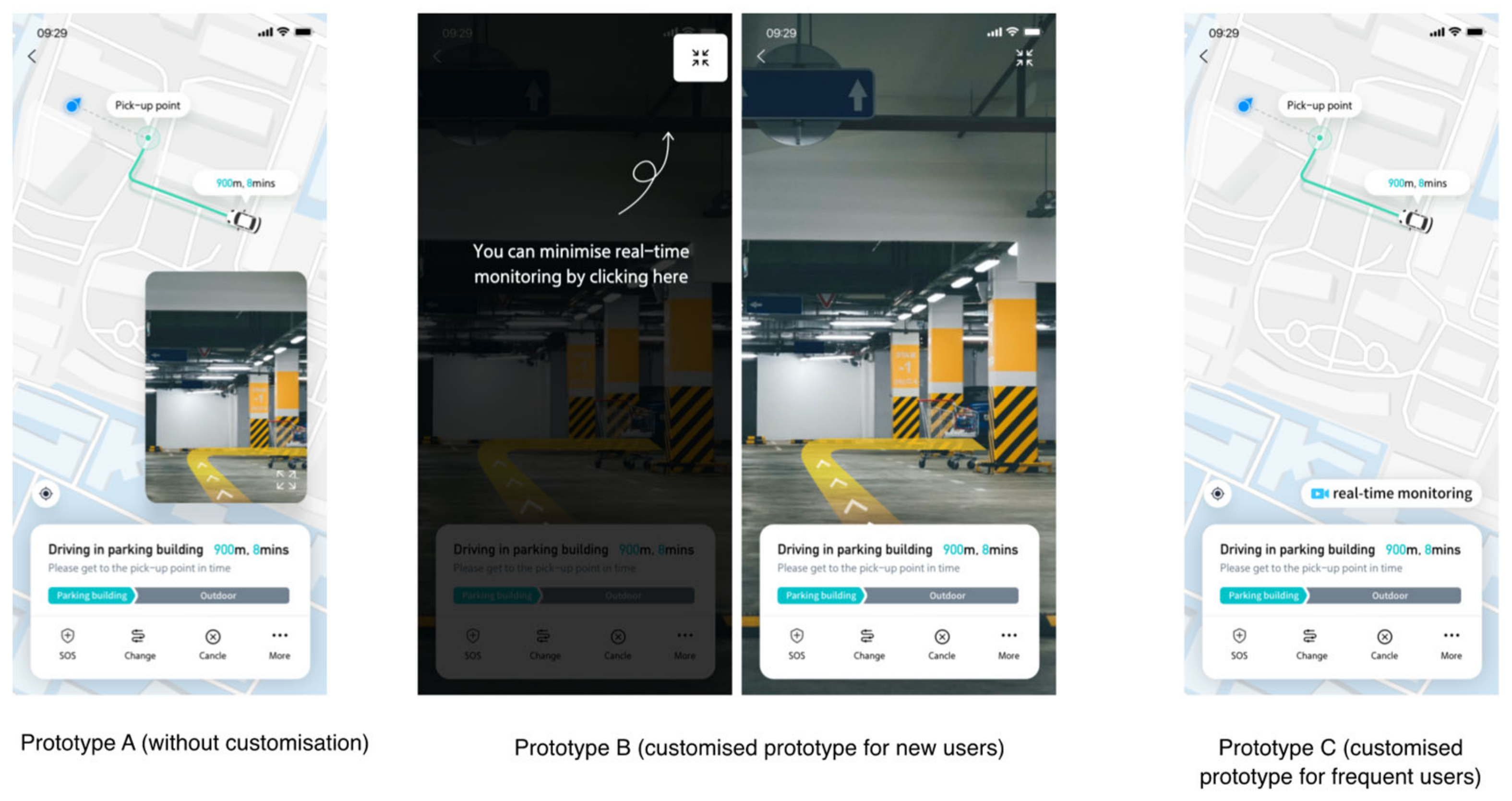
5.1. Prototypes
- Textual information is provided with guides for key functions during initial use.
- A full-screen live video presents the real-time vehicle status, with overlay visualisations simulating augmented reality to enhance system transparency.
- By presenting information concisely, the vehicle provides users with an overview of the travel route for easy viewing and convenience.
- Textual information with an icon conveys semantic information to help users monitor the vehicle’s parking status.
5.2. Procedures
5.3. Sample
5.4. Dependent Variables
5.5. Hypothesis
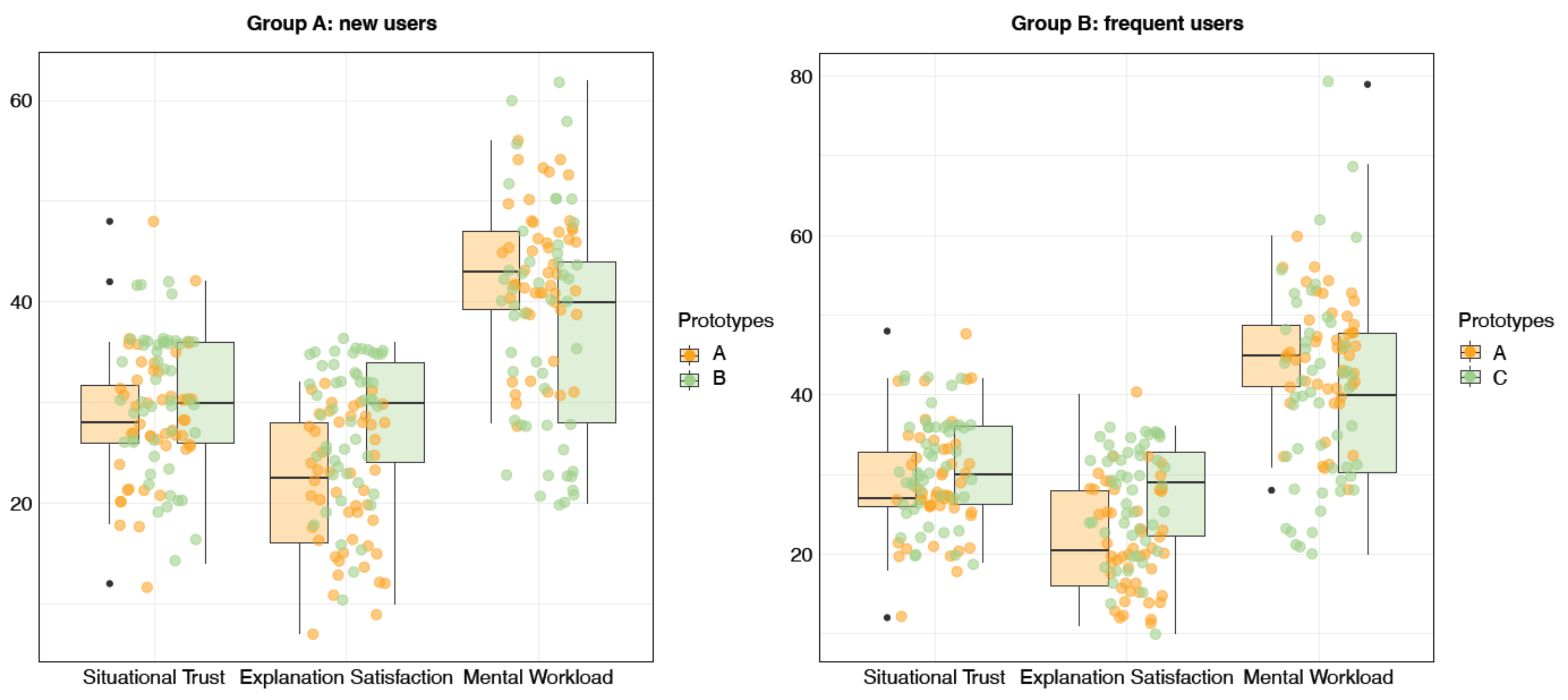
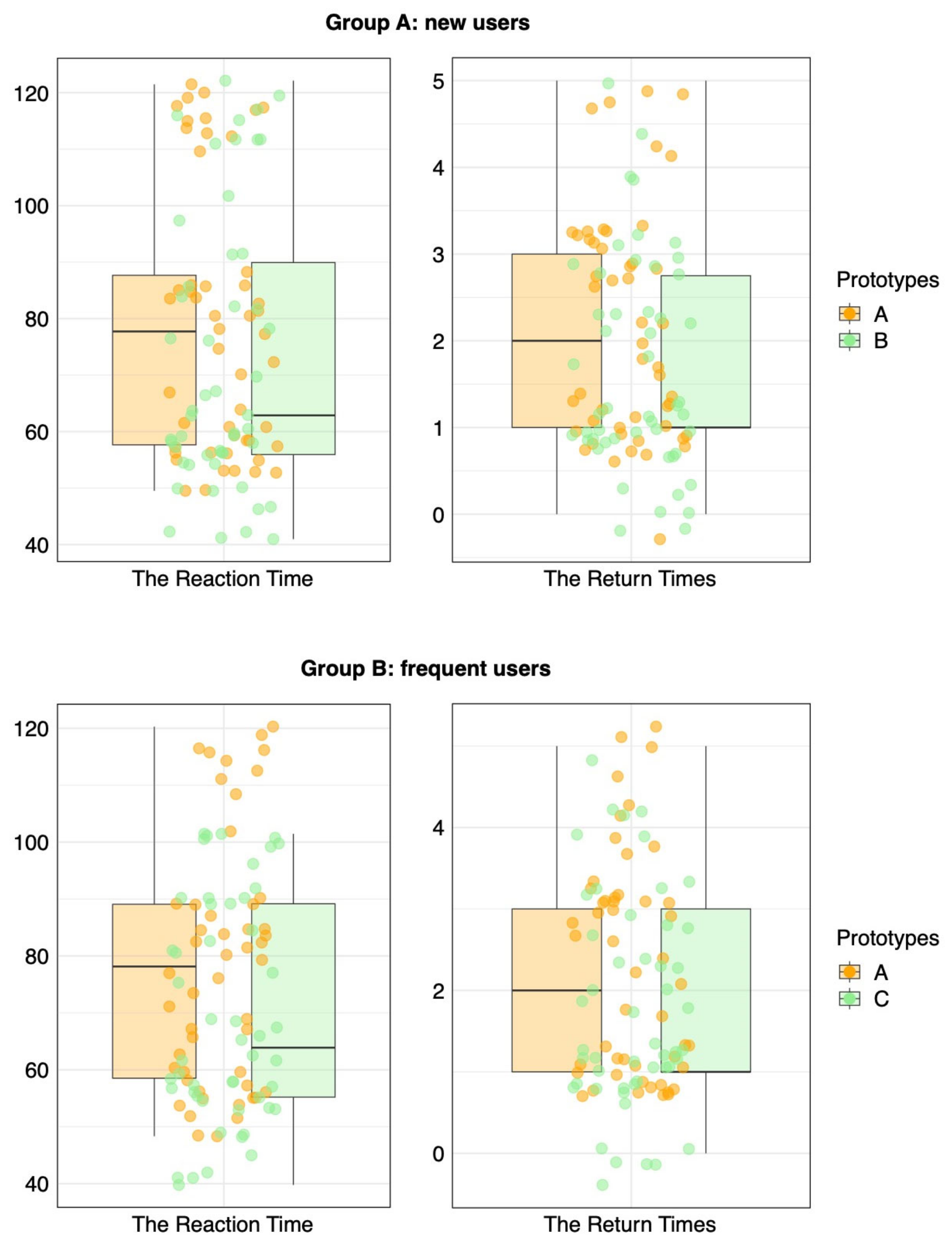
6. Experiment 2 Results
7. Discussion
7.1. Design Implications and Future Challenges
7.2. Limitations and Future Research
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variables | Questions | Scale | References | |
|---|---|---|---|---|
| Situational Trust | 01. | I trust the automation in this situation. | 7-point Likert scale (Ratings that range from 1 = not at all, to 7 = extremely) | [33] |
| 02. | I would have performed better than the automated vehicle in this situation (reverse scored). | |||
| 03. | In this situation, the automated vehicle performs well enough for me to engage in other activities (such as reading). | |||
| 04. | The situation was risky (reverse scored). | |||
| 05. | The automated vehicle made an unsafe judgement in this situation (reverse scored). | |||
| 06. | The automated vehicle reacted appropriately to the environment. | |||
| NASA-TLX | 07. | How much mental and perceptual activity was required (e.g., thinking, deciding, calculating, remembering, looking, searching, etc.)? Was the task easy or demanding, simple or complex, exacting or forgiving? | 7-point Likert scale (Ratings that range from 1 = low, to 7 = high) | [36] |
| 08. | How much physical activity was required (e.g., pushing, pulling, turning, controlling, activating, etc.)? Was the task easy or demanding, slow or brisk, slack or strenuous, restful or laborious? | |||
| 09. | How much time pressure did you feel due to the rate or pace at which the tasks or task elements occurred? Was the pace slow and leisurely or rapid and frantic? | |||
| 10. | How hard did you have to work (mentally and physically) to accomplish your level of performance? | |||
| 11. | How insecure, discouraged, irritated, stressed, and annoyed versus secure, gratified, content, relaxed, and complacent did you feel during the task? | |||
| 12. | How successful do you think you were in accomplishing the goals of the task set by the experimenter (or yourself)? How satisfied were you with your performance in accomplishing these goals? | 7-point Likert scale (Ratings that range from 1 = good, to 7 = poor) | ||
| User Experience | 13. | Is it clear or confusing? | 7-point Likert scale (Ratings that range from 1 = negative term, to 7 = positive term) | [34] |
| 14. | Is it inefficient or efficient? | |||
| 15. | Is it complicated or easy? | |||
| 16. | Is it obstructive or supportive? | |||
| 17 | Is it boring or exciting? | |||
| 18. | Is it not interesting or interesting? | |||
| 19. | Is it conventional or inventive? | |||
| 20. | Is it usual or leading edge? | |||
| Explanation Satisfaction | 21. | This explanation of how the [software, algorithm, tool] works is satisfying. | 7-point Likert scale (Ratings that range from 1 = not at all, to 7 = extremely) | [37] |
| 22. | This explanation of how the [software, algorithm, tool] works has sufficient detail. | |||
| 23. | This explanation of how the [software, algorithm, tool] works tells me how to use it. | |||
| 24. | This explanation of how the [software, algorithm, tool] works is helpful. | |||
| 25. | This explanation lets me judge when I should trust and not trust the [software, algorithm, tool]. |
References
- Tomasevic, N.; Young, K.L.; Horberry, T.; Fildes, B. A path towards sustainable vehicle automation: Willingness to engage in Level 3 automated driving. Sustainability 2022, 14, 4602. [Google Scholar] [CrossRef]
- Banzhaf, H.; Nienhuser, D.; Knoop, S.; Zollner, J.M. The future of parking: A survey on automated valet parking with an outlook on high density parking. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1827–1834. [Google Scholar]
- Ni, J.; Lin, X.; Shen, X. Toward Privacy-Preserving Valet Parking in Autonomous Driving Era. IEEE Trans. Veh. Technol. 2019, 68, 2893–2905. [Google Scholar] [CrossRef]
- Chehri, A.; Mouftah, H.T. Autonomous vehicles in the sustainable cities, the beginning of a green adventure. Sustain. Cities Soc. 2019, 51, e101751. [Google Scholar] [CrossRef]
- J3016; Automated Driving—Levels of Driving Automation. SAE International: Warrendale, PA, USA, 2014.
- Rödel, C.; Stadler, S.; Meschtscherjakov, A.; Tscheligi, M. Towards autonomous cars: The effect of autonomy levels on acceptance and user experience. In Proceedings of the AutomotiveUI ‘14: 6th International Conference on Automotive user Interfaces and Interactive Vehicular Applications, Seattle, WA, USA, 17–19 September 2014; pp. 1–8. [Google Scholar]
- Ha, T.; Kim, S.; Seo, D.; Lee, S. Effects of explanation types and perceived risk on trust in autonomous vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2020, 73, 271–280. [Google Scholar] [CrossRef]
- Edmonds, E. AAA Newsroom: Self-Driving Cars Stuck in Neutral on the Road to Acceptance. 2020. Available online: https://newsroom.aaa.com/tag/autonomous-vehicles/ (accessed on 5 March 2020).
- Cunneen, M.; Mullins, M.; Murphy, F. Autonomous Vehicles and Embedded Artificial Intelligence: The Challenges of Framing Machine Driving Decisions. Appl. Artif. Intell. 2019, 33, 706–731. [Google Scholar] [CrossRef]
- Omeiza, D.; Webb, H.; Jirotka, M.; Kunze, L. Explanations in autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 10142–10162. [Google Scholar] [CrossRef]
- Schneider, T.; Hois, J.; Rosenstein, A.; Ghellal, S.; Theofanou-Fülbier, D.; Gerlicher, A.R. Explain yourself! Transparency for positive ux in autonomous driving. In Proceedings of the CHI ‘2021 Conference on Human Factors in Computing Systems, Yokohama, Japan, 8–13 May 2021; pp. 1–12. [Google Scholar]
- Goldman, C.V.; Bustin, R. Trusting Explainable Autonomous Driving: Simulated Studies. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 1255–1260. [Google Scholar]
- Zhang, Q.; Yang, X.J.; Robert, L.P. What and When to Explain? A Survey of the Impact of Explanation on Attitudes toward Adopting Automated Vehicles. IEEE Access 2021, 9, 159533–159540. [Google Scholar] [CrossRef]
- Haspiel, J.; Du, N.; Meyerson, J.; Lionel, P.R., Jr.; Tilbury, D.; Yang, X.J.; Pradhan, A.K. Explanations and expectations: Trust building in automated vehicles. In Proceedings of the HRI’18: ACM/IEEE International Conference on Human-Robot Interaction, Chicago, IL, USA, 5–8 March 2018; pp. 119–120. [Google Scholar]
- Häuslschmid, R.; von Buelow, M.; Pfleging, B.; Butz, A. Supporting Trust in autonomous driving. In Proceedings of the IUI ‘17: 22nd International Conference on Intelligent User Interfaces, Limassol, Cyprus, 13–16 March 2017; pp. 319–329. [Google Scholar]
- Koo, J.; Kwac, J.; Ju, W.; Steinert, M.; Leifer, L.; Nass, C. Why did my car just do that? Explaining semi-autonomous driving actions to improve driver understanding, trust, and performance. Int. J. Interact. Des. Manuf. 2014, 9, 269–275. [Google Scholar] [CrossRef]
- Naujoks, F.; Forster, Y.; Wiedemann, K.; Neukum, A. Speech improves human-automation cooperation in automated driving. In Proceedings of the Mensch und Computer 2016–Workshopband, Aachen, Germany, 4–7 September 2016. [Google Scholar]
- Hois, J.; Theofanou-Fuelbier, D.; Junk, A.J. How to Achieve Explainability and Transparency in Human AI Interaction. In Proceedings of the HCII 2019: International Conference on Human-Computer Interaction, Orlado, FL, USA, 26–31 July 2019; pp. 177–183. [Google Scholar]
- Abdul, A.; Vermeulen, J.; Wang, D.; Lim, B.Y.; Kankanhalli, M. Trends and trajectories for explainable, accountable and intelligible systems: An HCI research agenda. In Proceedings of the CHI ‘18 Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–18. [Google Scholar]
- Park, S.Y.; Moore, D.J.; Sirkin, D. What a Driver Wants: User Preferences in Semi-Autonomous Vehicle Decision-Making. In Proceedings of the CHI‘20: Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–13. [Google Scholar] [CrossRef]
- De Craen, S.; Twisk, D.; Hagenzieker, M.; Elffers, H.; Brookhuis, K. Do young novice drivers overestimate their driving skills more than experienced drivers? Different methods lead to different conclusions. Accid. Anal. Prev. 2011, 43, 1660–1665. [Google Scholar] [CrossRef]
- Zhang, J.; Guo, G.; Wang, P.; Tang, Q.; Zhang, Z. Research on the Differences of Risk Perception Ability Between Novice and Experienced Drivers. In Proceedings of the HCII 2019: International Conference on Human-Computer Interaction, Orlando, FL, USA, 26–31 July 2019; pp. 433–447. [Google Scholar]
- Wolf, T.C. Explainability scenarios: Towards scenario-based XAI design. In Proceedings of the IUI ‘19: 24th International Conference on Intelligent User Interfaces, Los Angeles, CA, USA, 17–20 March 2019; pp. 252–257. [Google Scholar]
- Rosson, M.B.; Carroll, J.M. Scenario-based Design. Human-Computer Interaction: Development Process. In The Human-Computer Interaction Handbook; Jacko, J.A., Sears, A., Eds.; Lawrence Erlbaum Associates Inc.: Mahwah, NJ, USA, 2003; pp. 1032–1050. [Google Scholar]
- Carroll, J.M. Becoming social: Expanding scenario-based approaches in HCI. Behav. Inf. Technol. 1996, 15, 266–275. [Google Scholar] [CrossRef]
- Jo, Y.; Ha, J.; Hwang, S. Survey of Technology in Autonomous Valet Parking System. Int. J. Automot. Technol. 2023, 24, 1577–1587. [Google Scholar] [CrossRef]
- Williams, L. The whole story of parking: The world of parking is no longer stationary. Eng. Technol. 2019, 14, 56–61. [Google Scholar] [CrossRef]
- Khalid, M.; Cao, Y.; Aslam, N.; Raza, M.; Moon, A.; Zhou, H. AVPark: Reservation and Cost Optimization-Based Cyber-Physical System for Long-Range Autonomous Valet Parking (L-AVP). IEEE Access 2019, 7, 114141–114153. [Google Scholar] [CrossRef]
- Khalid, M.; Cao, Y.; Zhang, X.; Han, C.; Peng, L.; Aslam, N.; Ahmad, N. Towards autonomy: Cost-effective scheduling for long-range autonomous valet parking (LAVP). In Proceedings of the 2018 IEEE Wireless Communications and Networking Conference (WCNC), Barcelona, Spain, 15–18 April 2018; pp. 1–6. [Google Scholar]
- Khalid, M.; Wang, K.; Aslam, N.; Cao, Y.; Ahmad, N.; Khan, M.K. From smart parking towards autonomous valet parking: A survey, challenges and future Works. J. Netw. Comput. Appl. 2020, 175, 102935. [Google Scholar] [CrossRef]
- Go, K.; Carroll, J.M. The blind men and the elephant: Views of scenario-based system design. Interactions 2004, 11, 44–53. [Google Scholar] [CrossRef]
- Fröhlich, P.; Schatz, R.; Buchta, M.; Schrammel, J.; Suette, S.; Tscheligi, M. “What’s the Robo-Driver up to?” Requirements for Screen-based Awareness and Intent Communication in Autonomous Buses. i-com 2019, 18, 151–165. [Google Scholar] [CrossRef]
- Holthausen, B.E.; Wintersberger, P.; Walker, B.N.; Riener, A. Situational trust scale for automated driving (STS-AD): Development and initial validation. In Proceedings of the Automotive UI ‘20: 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual Event, 21–22 September 2020; pp. 40–47. [Google Scholar]
- Schrepp, M.; Hinderks, A.; Thomaschewski, J. Design and Evaluation of a Short Version of the User Experience Questionnaire (UEQ-S). Int. J. Interact. Multimedia Artif. Intell. 2017, 4, 103–108. [Google Scholar] [CrossRef]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. In Advances in Psychology; North-Holland: Amsterdam, The Netherlands, 1988; Volume 52, pp. 139–183. [Google Scholar]
- Hart, S.G. Nasa-Task Load Index (NASA-TLX); 20 Years Later. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2006, 50, 904–908. [Google Scholar] [CrossRef]
- Hoffman, R.R.; Mueller, S.T.; Klein, G.; Litman, J. Metrics for explainable AI: Challenges and prospects. arXiv 2018, arXiv:1812.04608. [Google Scholar]
- Helldin, T.; Falkman, G.; Riveiro, M.; Davidsson, S. Presenting system uncertainty in automotive UIs for sup-porting trust calibration in autonomous driving. In Proceedings of the Automotive UI ‘13: 5th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Eindhoven, The Netherlands, 28–30 October 2013; pp. 210–217. [Google Scholar]
- Du, N.; Haspiel, J.; Zhang, Q.; Tilbury, D.; Pradhan, A.K.; Yang, X.J.; Lione, P.R., Jr. Look who’s talking now: Implications of AV’s explanations on driver’s trust, AV preference, anxiety and mental workload. Transp. Res. Part C Emerg. Technol. 2019, 104, 428–442. [Google Scholar] [CrossRef]
- Bilgic, M.; Mooney, R.J. Explaining recommendations: Satisfaction vs. promotion. In Beyond Personalization 2005, A Workshop on the Next Stage of Recommender Systems Research, Proceedings of the 2005 International Conference on Intelligent User Interfaces, San Diego, CA, USA, 10–13 January 2005; GroupLens Research: Minneapolis, MN, USA, 2005; Volume 5, p. 153. [Google Scholar]
- Ehsan, U.; Harrison, B.; Chan, L.; Riedl, M.O. Rationalization: A Neural Machine Translation Approach to Generating Natural Language Explanations. In Proceedings of the AIES ‘18: AAAI/ACM Conference on AI, Ethics, and Society, New Orleans, LA, USA, 2–3 February 2018; pp. 81–87. [Google Scholar]
- Hendricks, L.A.; Akata, Z.; Rohrbach, M.; Donahue, J.; Schiele, B.; Darrell, T. Generating visual explanations. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 3–19. [Google Scholar]
- Herlocker, J.L.; Konstan, J.A.; Riedl, J. Explaining collaborative filtering recommendations. In Proceedings of the 2000 ACM Conference on Computer Supported Cooperative Work, Philadelphia, PA, USA, 2–6 December 2000; pp. 241–250. [Google Scholar]
- Ye, L.R.; Johnson, P.E. The Impact of Explanation Facilities on User Acceptance of Expert Systems Advice. MIS Q. 1995, 19, 157–172. [Google Scholar] [CrossRef]
- Zhou, J.; Li, Z.; Hu, H.; Yu, K.; Chen, F.; Li, Z.; Wang, Y. Effects of influence on user trust in predictive decision making. In Extended Abstracts of the 2019 CHI Conference on Human Factors in Computing Systems; Association for Computing Machinery: New York, NY, USA, 2019; pp. 1–6. [Google Scholar]
- Berkovsky, S.; Taib, R.; Conway, D. How to Recommend?: User Trust Factors in Movie Recommender Systems. In Proceedings of the IUI’17: 22nd International Conference on Intelligent User Interfaces, Limassol, Cyprus, 13–16 March 2017; pp. 287–300. [Google Scholar]
- Holliday, D.; Wilson, S.; Stumpf, S. User Trust in Intelligent Systems: A Journey Over Time. In Proceedings of the IUI’16: 21st International Conference on Intelligent User Interfaces, Sonoma, CA, USA, 7–10 March 2016; pp. 164–168. [Google Scholar]
- Nothdurft, F.; Heinroth, T.; Minker, W. The impact of explanation dialogues on human-computer trust. In Human-Computer Interaction. Users and Contexts of Use. HCII 2013; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8006, pp. 59–67. [Google Scholar]
- van der Waa, J.; Nieuwburg, E.; Cremers, A.; Neerincx, M. Evaluating XAI: A comparison of rule-based and example-based explanations. Artif. Intell. 2021, 291, 103404. [Google Scholar] [CrossRef]
- Silva, A.; Schrum, M.; Hedlund-Botti, E.; Gopalan, N.; Gombolay, M. Explainable Artificial Intelligence: Evaluating the Objective and Subjective Impacts of xAI on Human-Agent Interaction. Int. J. Human–Computer Interact. 2023, 39, 1390–1404. [Google Scholar] [CrossRef]
- Hoff, K.A.; Bashir, M. Trust in automation: Integrating empirical evidence on factors that influence trust. Hum. Factors 2015, 57, 407–434. [Google Scholar] [CrossRef] [PubMed]
- Zhou, S.; Sun, X.; Wang, Q.; Liu, B.; Burnett, G. Examining pedestrians’ trust in automated vehicles based on attributes of trust: A qualitative study. Appl. Ergon. 2023, 109, 103997. [Google Scholar] [CrossRef] [PubMed]
- Sun, X.; Li, J.; Tang, P.; Zhou, S.; Peng, X.; Li, H.N.; Wang, Q. Exploring Personalised Autonomous Vehicles to Influence User Trust. Cogn. Comput. 2020, 12, 1170–1186. [Google Scholar] [CrossRef]
- Dikmen, M.; Burns, C. Trust in autonomous vehicles: The case of Tesla Autopilot and Summon. In Proceedings of the 2017 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Banff, AB, Canada, 5–8 October 2017. [Google Scholar] [CrossRef]
- Schuß, M.; Riener, A. ”Give Me the Keys, I’ll Drive!”. In Proceedings of the AutomotiveUI ‘20: 12th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Virtual Event, 20–21 September 2020. [Google Scholar]
- Mehrotra, S.; Wang, M.; Wong, N.; Parker, J.I.; Roberts, S.C.; Kim, W.; Romo, A.; Horrey, W.J. Human-Machine Interfaces and Vehicle Automation: A Review of the Literature and Recommendations for System Design, Feedback, and Alerts; AAA Foundation for Traffic Safety: Washington, DC, USA, 2022. [Google Scholar]
- Korpi, J.; Ahonen-Rainio, P. Design guidelines for pictographic symbols: Evidence from symbols designed by students. In Proceedings of the 1st ICA European Symposium on Cartography, Vienna, Austria, 10–12 November 2015; pp. 1–16. [Google Scholar]
- Collaud, R.; Reppa, I.; Défayes, L.; McDougall, S.; Henchoz, N.; Sonderegger, A. Design standards for icons: The independent role of aesthetics, visual complexity and concreteness in icon design and icon understanding. Displays 2022, 74, 102290. [Google Scholar] [CrossRef]
- Colley, M.; Stampf, A.; Fischer, W.; Rukzio, E. Effects of 3D Displays on Mental Workload, Situation Awareness, Trust, and Performance Assessment in Automated Vehicles. In Proceedings of the MUM ‘23: International Conference on Mobile and Ubiquitous Multimedia, Vienna, Austria, 3–6 December 2023. [Google Scholar]
- Lee, S.C.; Yoon, S.H.; Ji, Y.G. Effects of Non-Driving-Related Task Attributes on Takeover Quality in Automated Vehicles. Int. J. Human–Computer Interact. 2021, 37, 211–219. [Google Scholar] [CrossRef]
- Pink, S.; Osz, K.; Raats, K.; Lindgren, T.; Fors, V. Design anthropology for emerging technologies: Trust and sharing in autonomous driving futures. Des. Stud. 2020, 69, 100942. [Google Scholar] [CrossRef]
- Molnar, C. Interpretable Machine Learning. 2019. Available online: https://christophm.github.io/interpretable-ml-book/ (accessed on 17 December 2023).
- Lee, S.; Hong, J.; Jeon, G.; Jo, J.; Boo, S.; Kim, H.; Jung, S.; Park, J.; Choi, I.; Kim, S. Investigating effects of multimodal explanations using multiple In-vehicle displays for takeover request in conditionally automated driving. Transp. Res. Part F Traffic Psychol. Behav. 2023, 96, 1–22. [Google Scholar] [CrossRef]
- Goudarzi, A.; Ghayoor, F.; Waseem, M.; Fahad, S.; Traore, I. A Survey on IoT-Enabled Smart Grids: Emerging, Applications, Challenges, and Outlook. Energies 2022, 15, 6984. [Google Scholar] [CrossRef]
- Waseem, M.; Khan, M.A.; Goudarzi, A.; Fahad, S.; Sajjad, I.A.; Siano, P. Incorporation of Blockchain Technology for Different Smart Grid Applications: Architecture, Prospects, and Challenges. Energies 2023, 16, 820. [Google Scholar] [CrossRef]










| Respondents | Title | Gender | Country | Position |
|---|---|---|---|---|
| 1 | Dr | F | China | Researcher |
| 2 | Dr | M | Germany | Senior Researcher |
| 3 | Dr | M | China | Lead Tech |
| 4 | Dr | F | China | Researcher |
| 5 | Mr. | M | China | Senior Project Manager |
| 6 | Mr. | M | China | Director |
| 7 | Ms. | F | China | Senior Project Manager |
| 8 | Dr | F | China | Researcher |
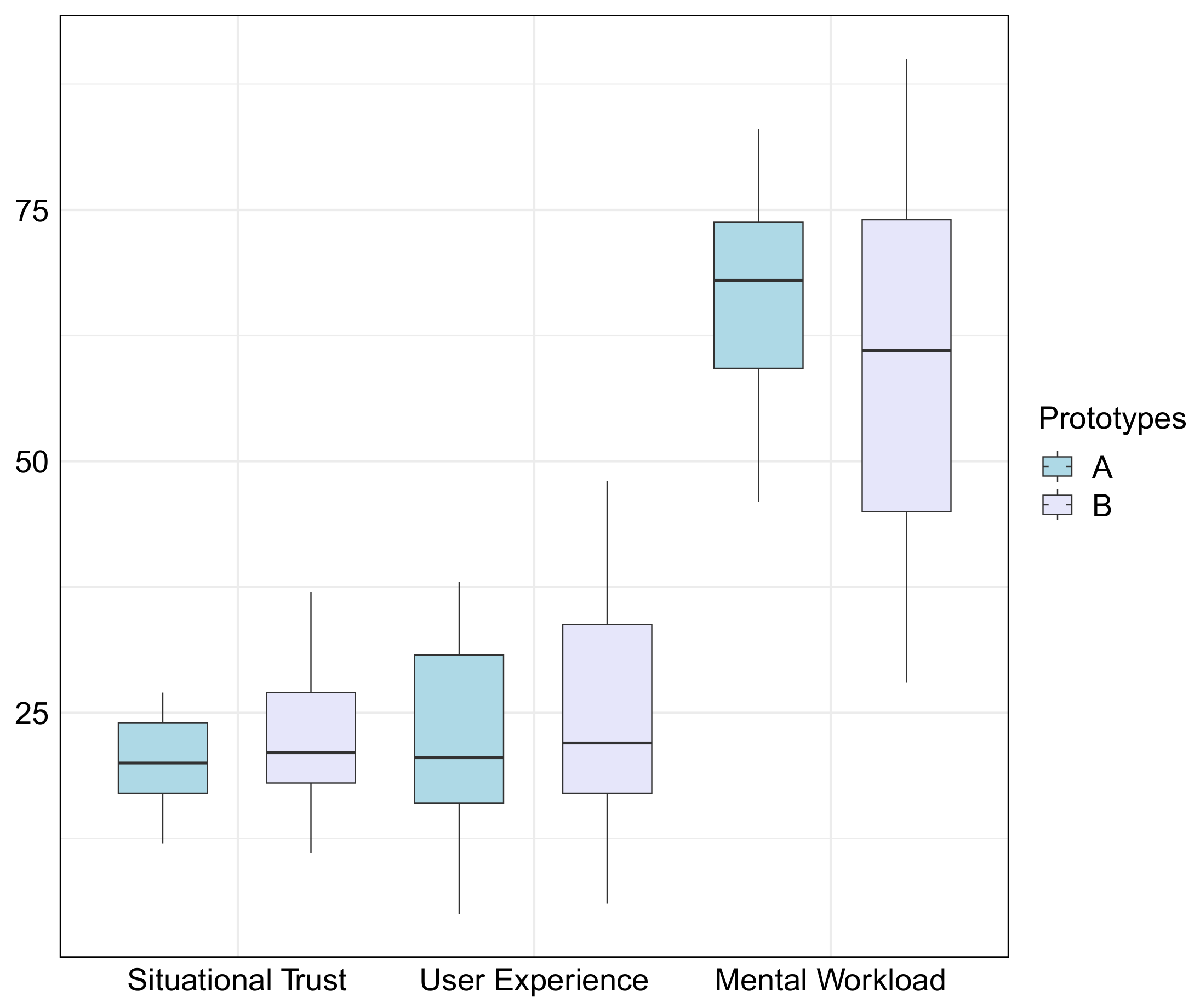
| Situational Trust (B)- Situational Trust (A) | UX (B)-UX (A) | Mental Workload (B)- Mental Workload (A) | |
|---|---|---|---|
| Z | −3.421 c | −2.900 c | −3.310 b |
| Asymptotic significance (two-tailed) | <0.001 | 0.004 | <0.001 |
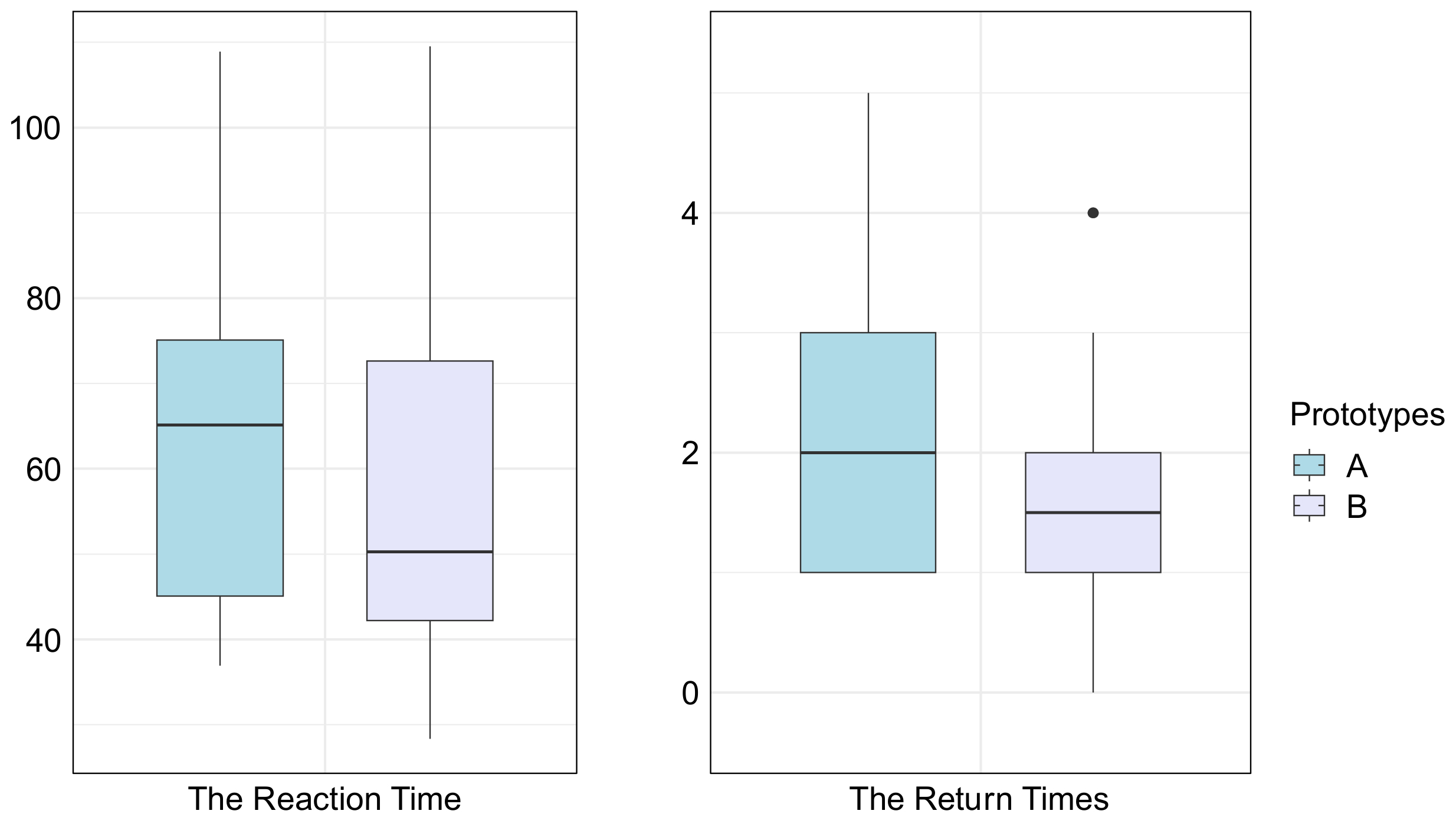
| The Reaction Time (B)-The Reaction Time (A) | The Return Times (B)-The Return Times (A) | |
|---|---|---|
| Z | −2.906 b | −3.059 b |
| Asymptotic significance (two-tailed) | 0.004 | 0.002 |
| Situational Trust (B)-Situational Trust (A) | Explanation Satisfaction (B)-Explanation Satisfaction (A) | Mental Workload (B)-Mental Workload (A) | |
|---|---|---|---|
| Z | −2.631 c | −5.786 c | −3.075 b |
| Asymptotic significance (two-tailed) | 0.009 | <0.001 | 0.002 |
| Situational Trust (C)-Situational Trust (A) | Explanation Satisfaction (C)-Explanation Satisfaction (A) | Mental Workload (C)-Mental Workload (A) | |
|---|---|---|---|
| Z | −2.996 c | −5.032 c | −2.632 b |
| Asymptotic significance (two-tailed) | 0.003 | <0.001 | 0.008 |
| The Reaction Time (B)-The Reaction time (A) | The Reaction Time (C)-The Reaction Time (A) | The Return Times (B)- The Return Times (A) | The Return Times (C)-The Return Times (A) | |
|---|---|---|---|---|
| Z | −2.751 b | −4.107 b | −2.418 b | −2.557 b |
| Asymptotic significance (two-tailed) | 0.006 | <0.001 | 0.016 | 0.011 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Feng, X. Analysing the Effects of Scenario-Based Explanations on Automated Vehicle HMIs from Objective and Subjective Perspectives. Sustainability 2024, 16, 63. https://doi.org/10.3390/su16010063
Ma J, Feng X. Analysing the Effects of Scenario-Based Explanations on Automated Vehicle HMIs from Objective and Subjective Perspectives. Sustainability. 2024; 16(1):63. https://doi.org/10.3390/su16010063
Chicago/Turabian StyleMa, Jun, and Xuejing Feng. 2024. "Analysing the Effects of Scenario-Based Explanations on Automated Vehicle HMIs from Objective and Subjective Perspectives" Sustainability 16, no. 1: 63. https://doi.org/10.3390/su16010063