


Hierarchical Model-Predictive-Control-Based Energy Management Strategy for Fuel Cell Hybrid Commercial Vehicles Incorporating Traffic Information

Abstract
:1. Introduction
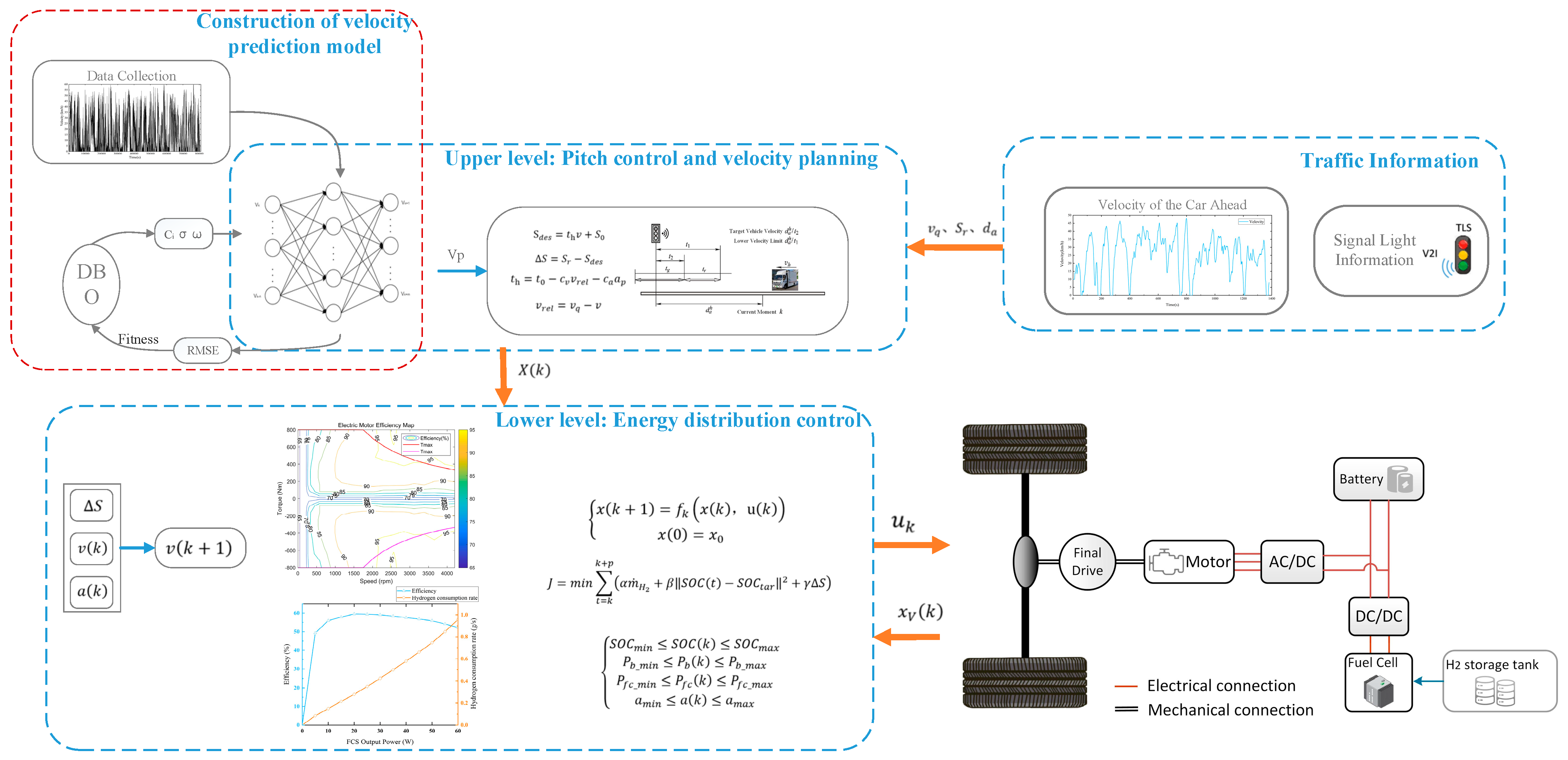
- A hierarchical energy management strategy tailored for fuel cell commercial vehicles integrating traffic information is proposed. Based on the large framework of MPC, a hierarchical energy management strategy is constructed. In the upper layer, an optimal economic velocity for the vehicle is planned by considering the front vehicle velocity, the following distance, and the traffic light information. The lower layer allocates the power of each power source in accordance with the sequence of the optimal economic velocity.
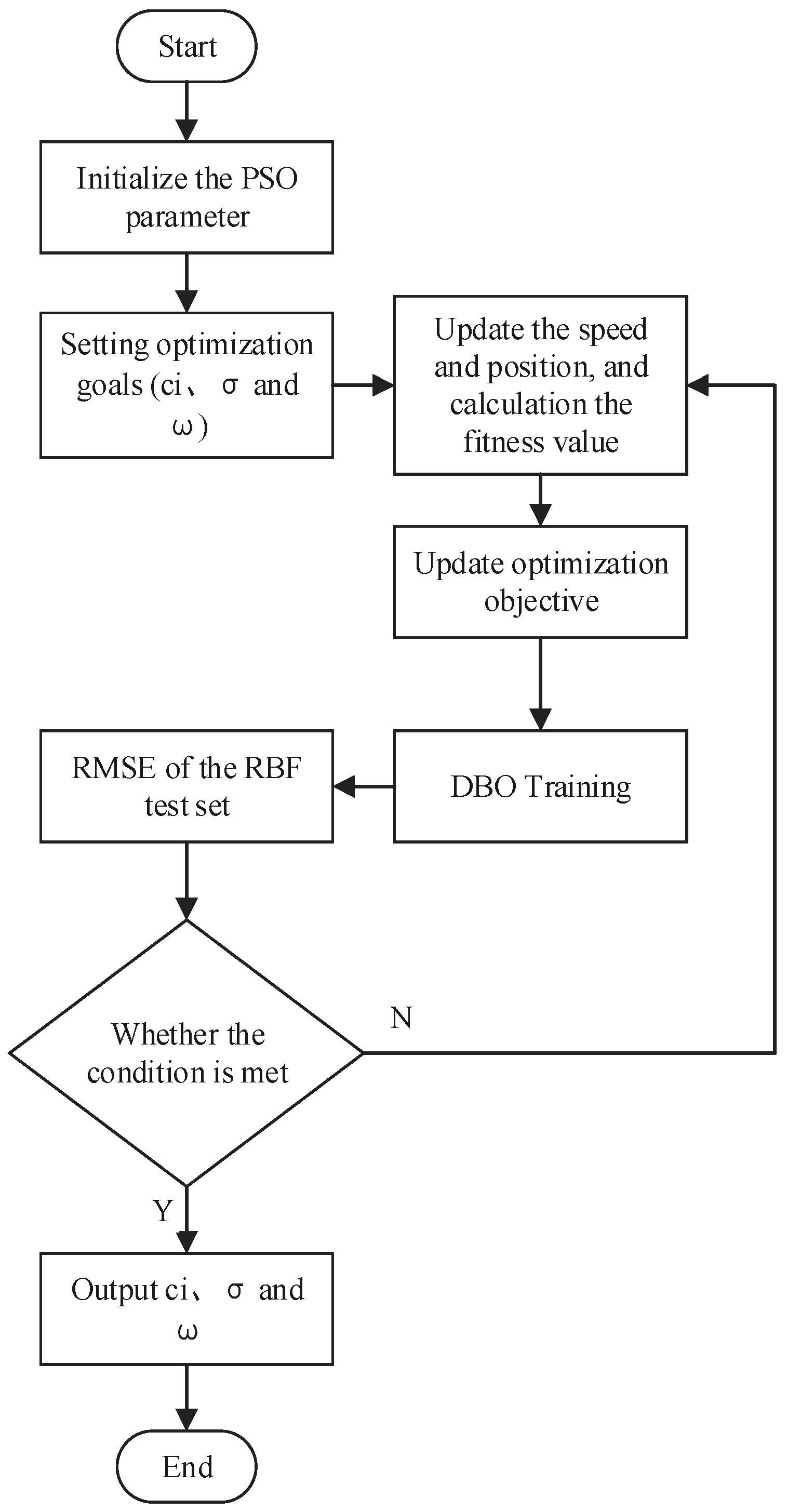
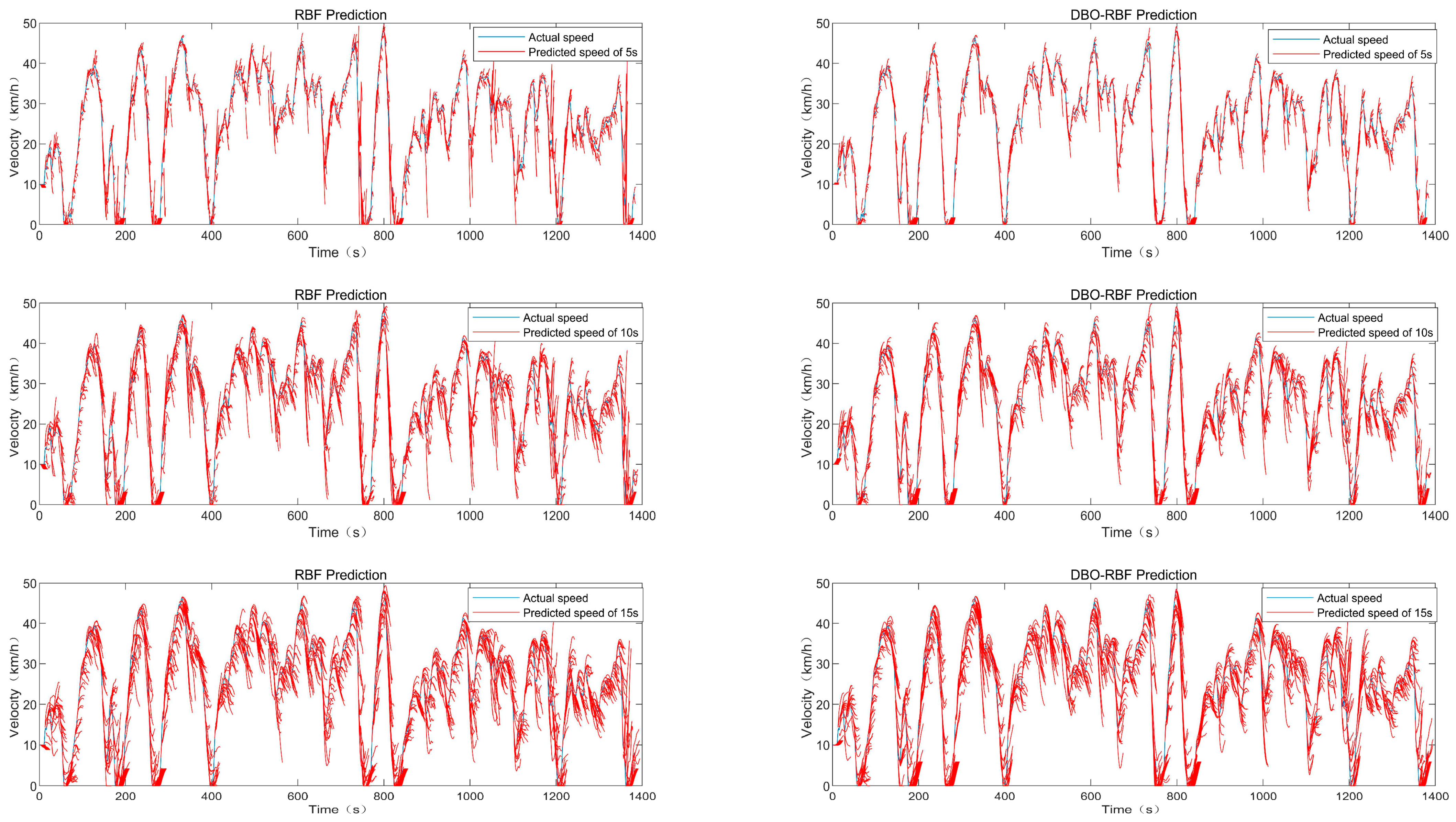
- The dung beetle optimization-radial basis function (DBO-RBF) neural network prediction model is constructed. The performance of the model predictive control is closely related to the prediction accuracy. Therefore, the dung beetle optimization (DBO) algorithm is used to optimize the radial basis function (RBF) neural network, which improves both the velocity prediction accuracy and the operational velocity of the prediction model.
- Different from the traditional velocity prediction, this paper predicts the future velocity of the front vehicle. The historical velocity information and environmental information of the preceding vehicle are used to predict the future velocity of the preceding vehicle.
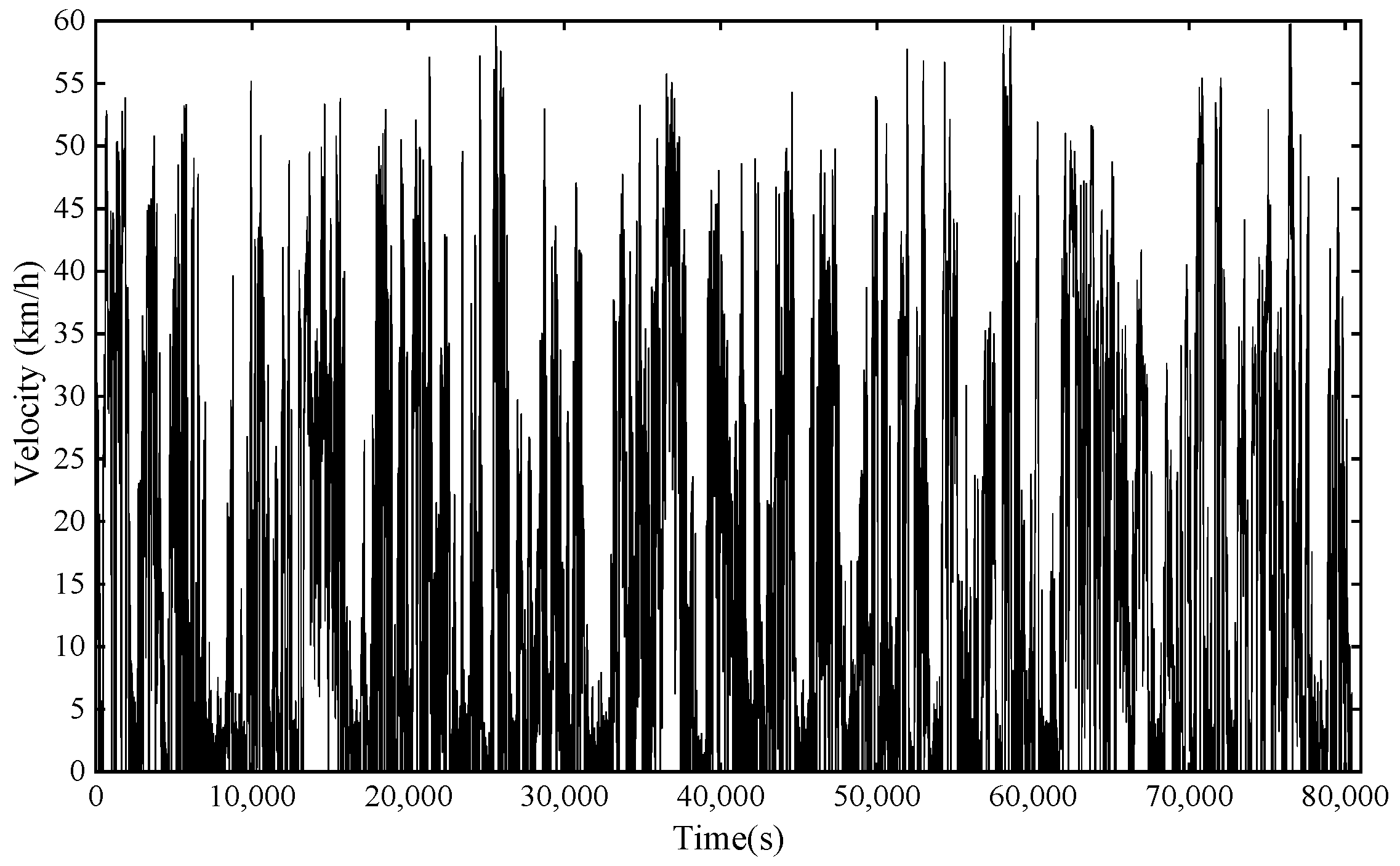
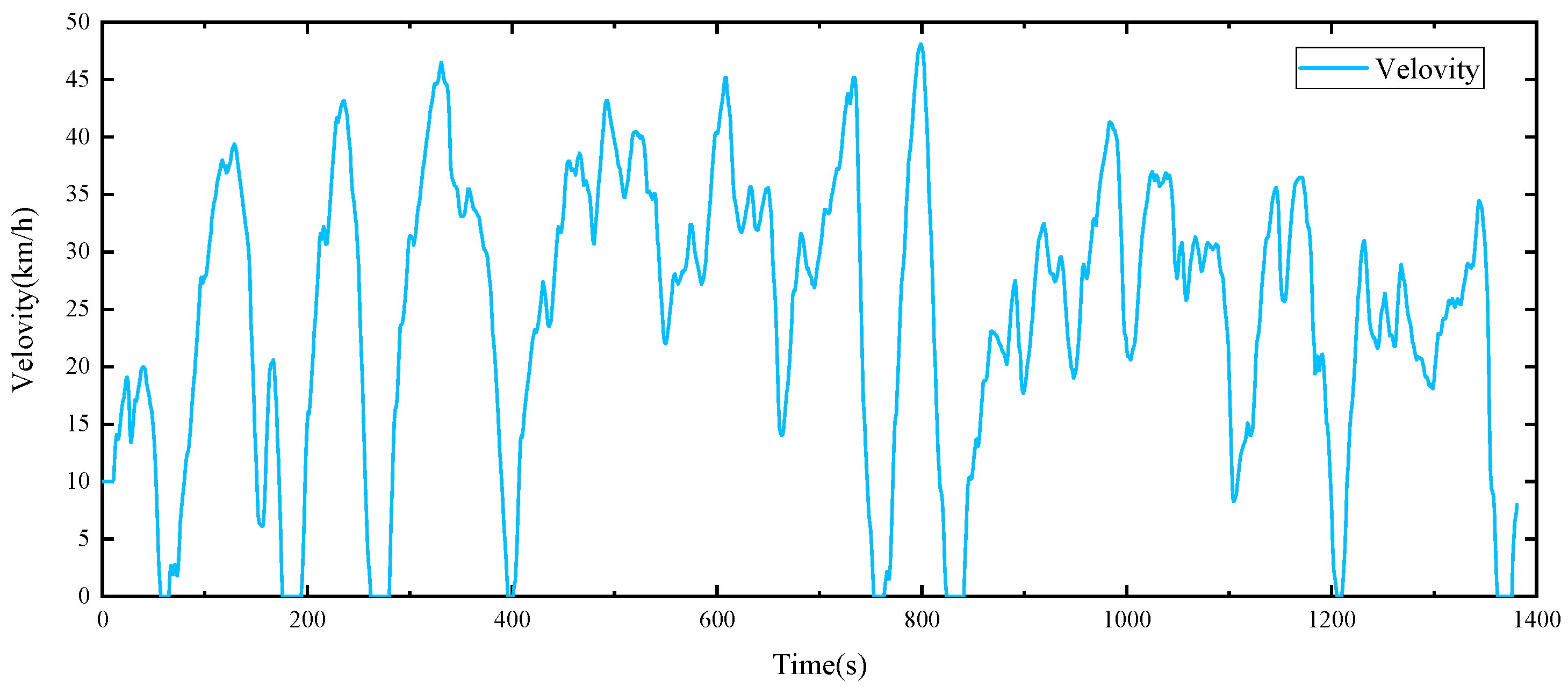
- Real fuel cell commercial vehicle driving data are collected as the neural network training set is used. To make the simulation closer to the actual situation and avoid the limitations of the working conditions used in the training model, the velocity data of the real fuel cell commercial vehicle are collected, data processing is performed on these original data, and the processed data are used for training and testing.
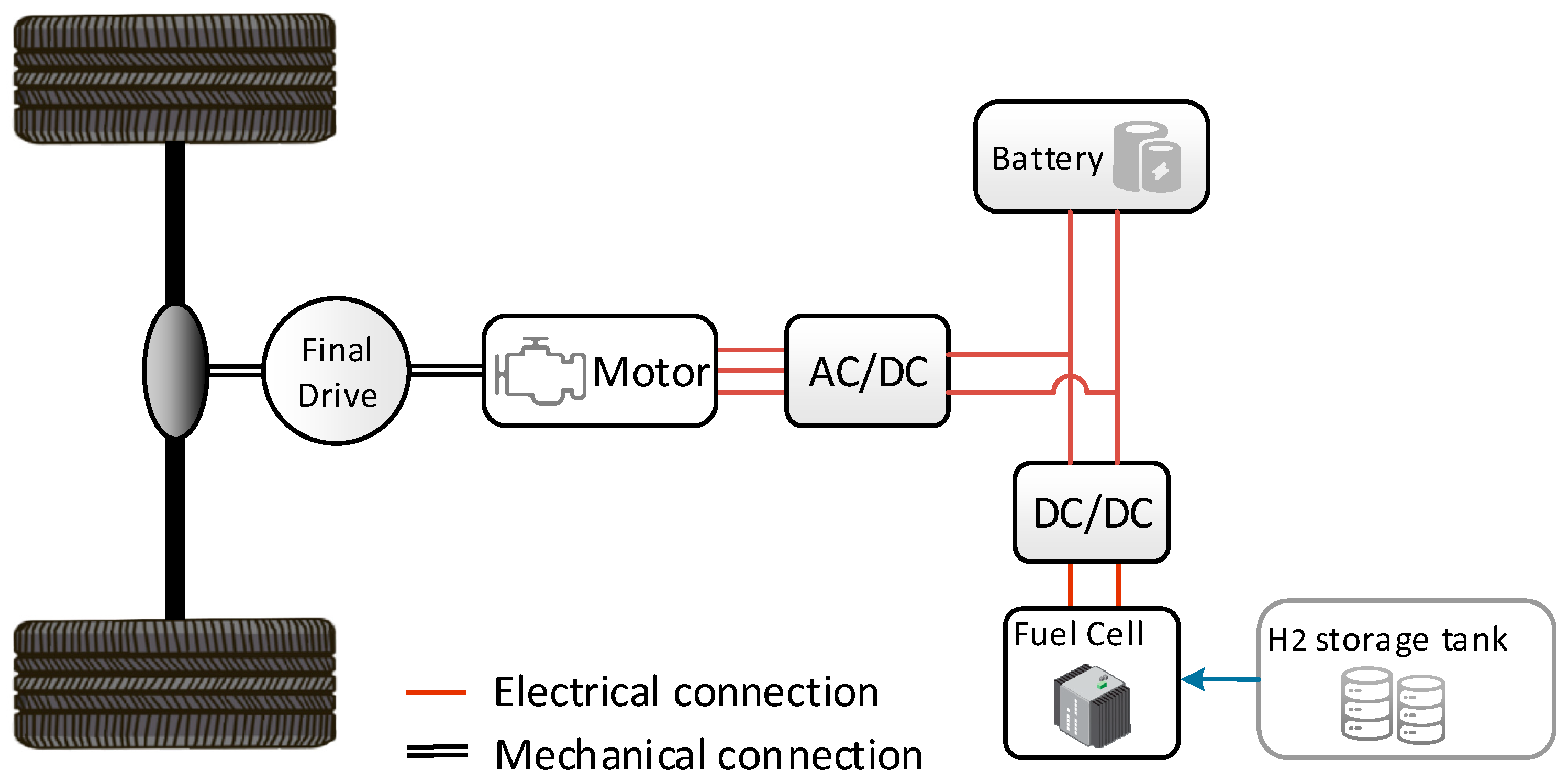
2. Vehicle System Configuration and Modeling
2.1. Vehicle Dynamics
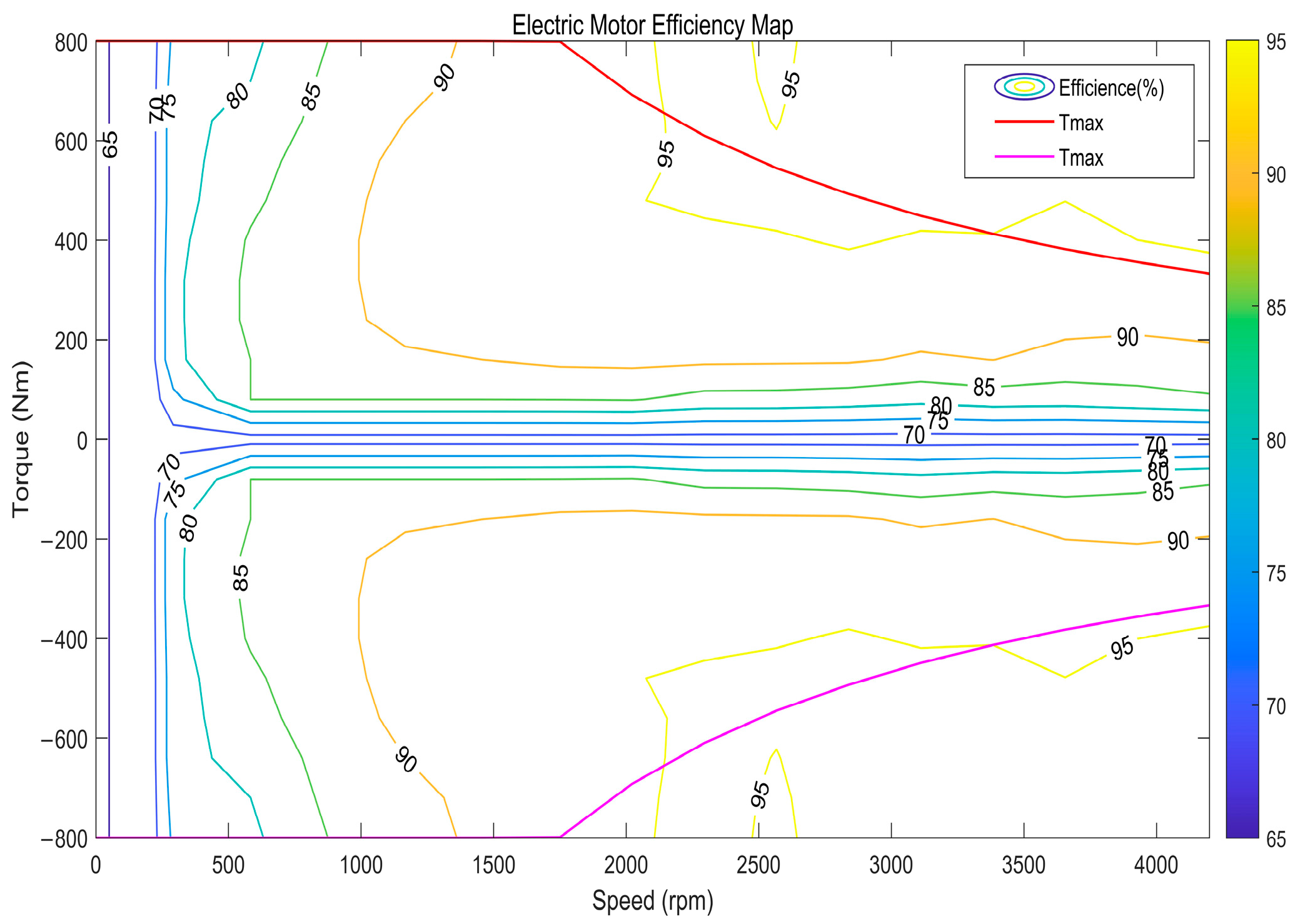
2.2. Motor Modeling
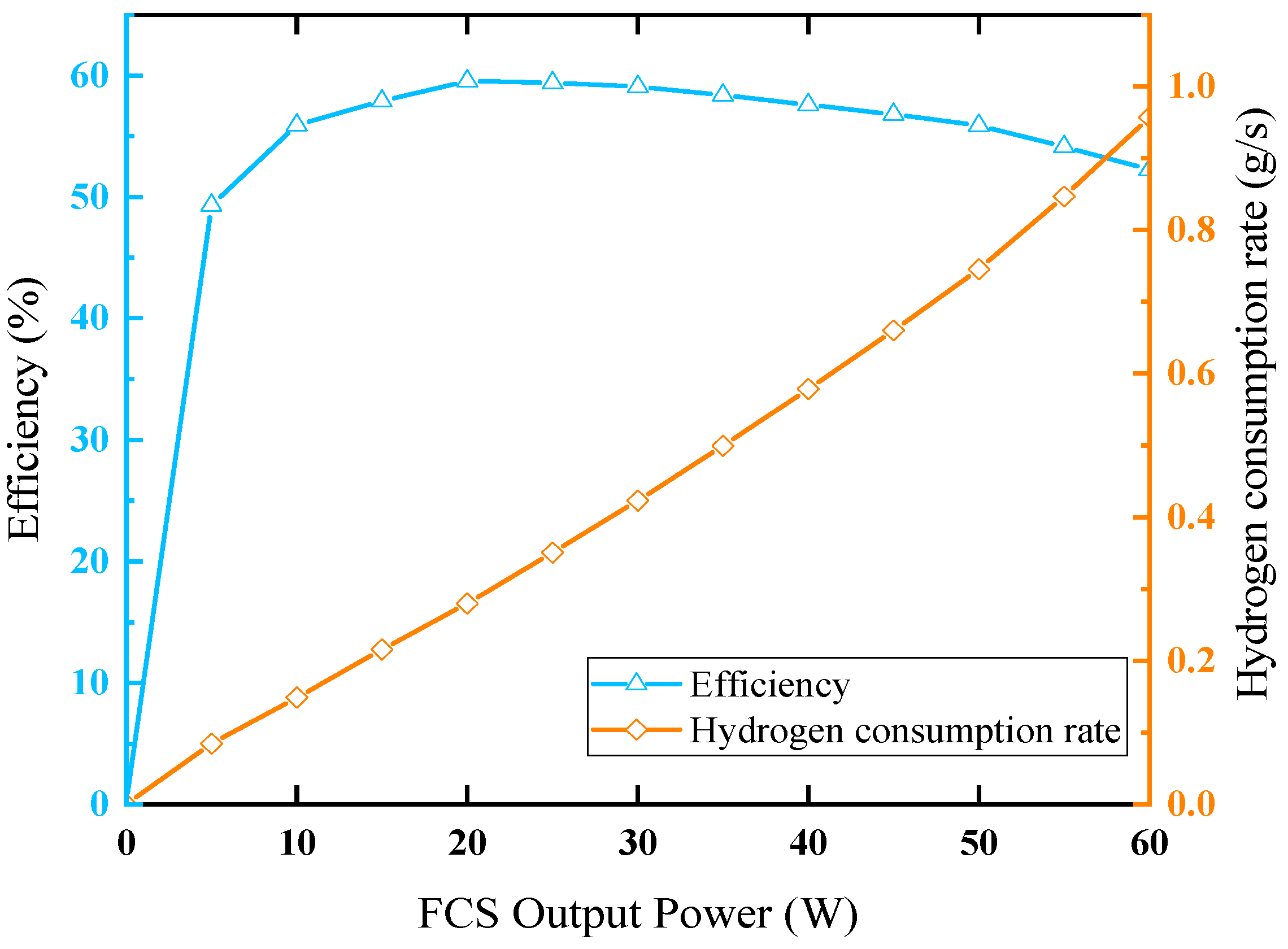
2.3. Fuel Cell System Modeling
2.4. Battery Modeling
3. Formulation of Control Strategy
3.1. Road Model
3.2. Improvement of The Prediction Model
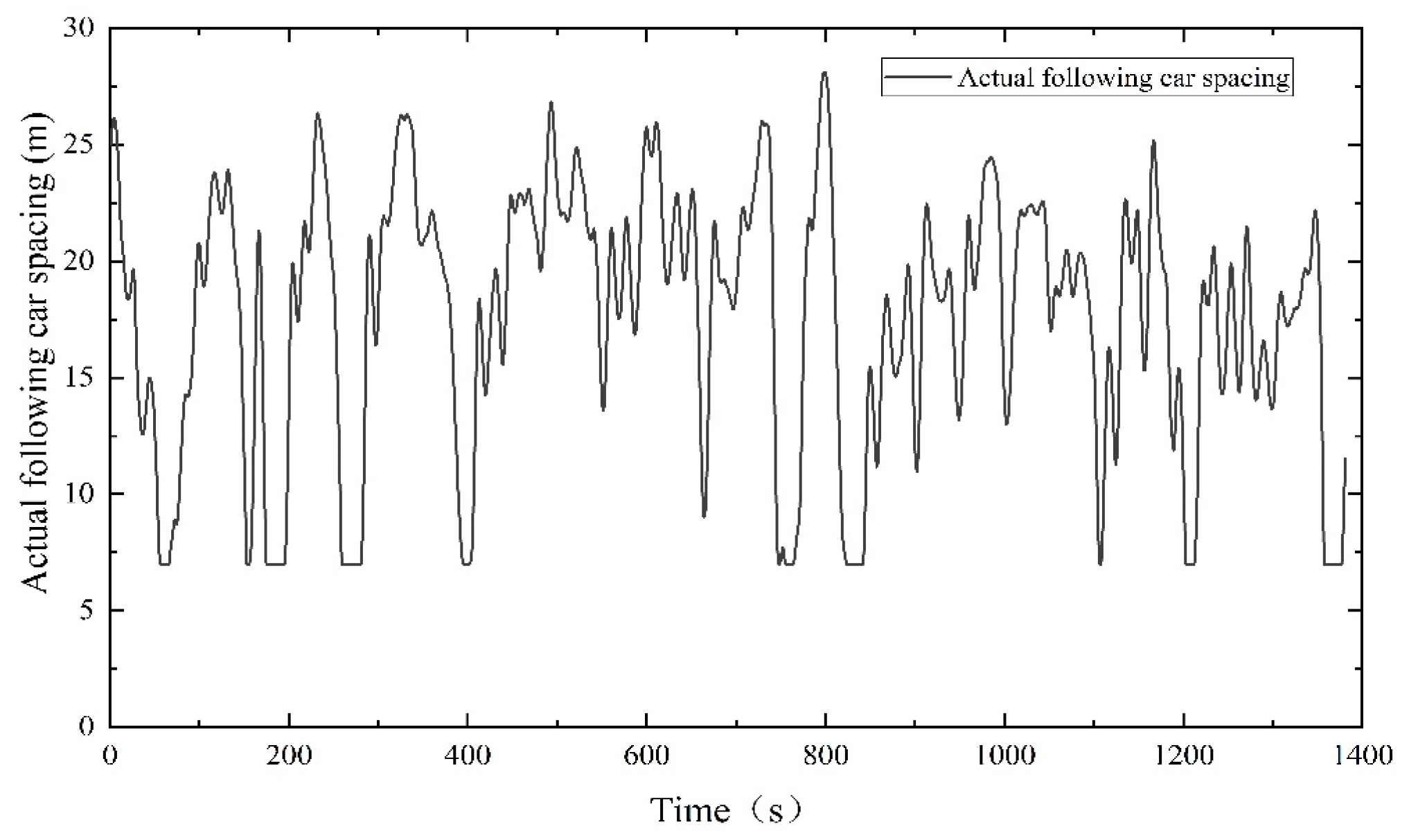
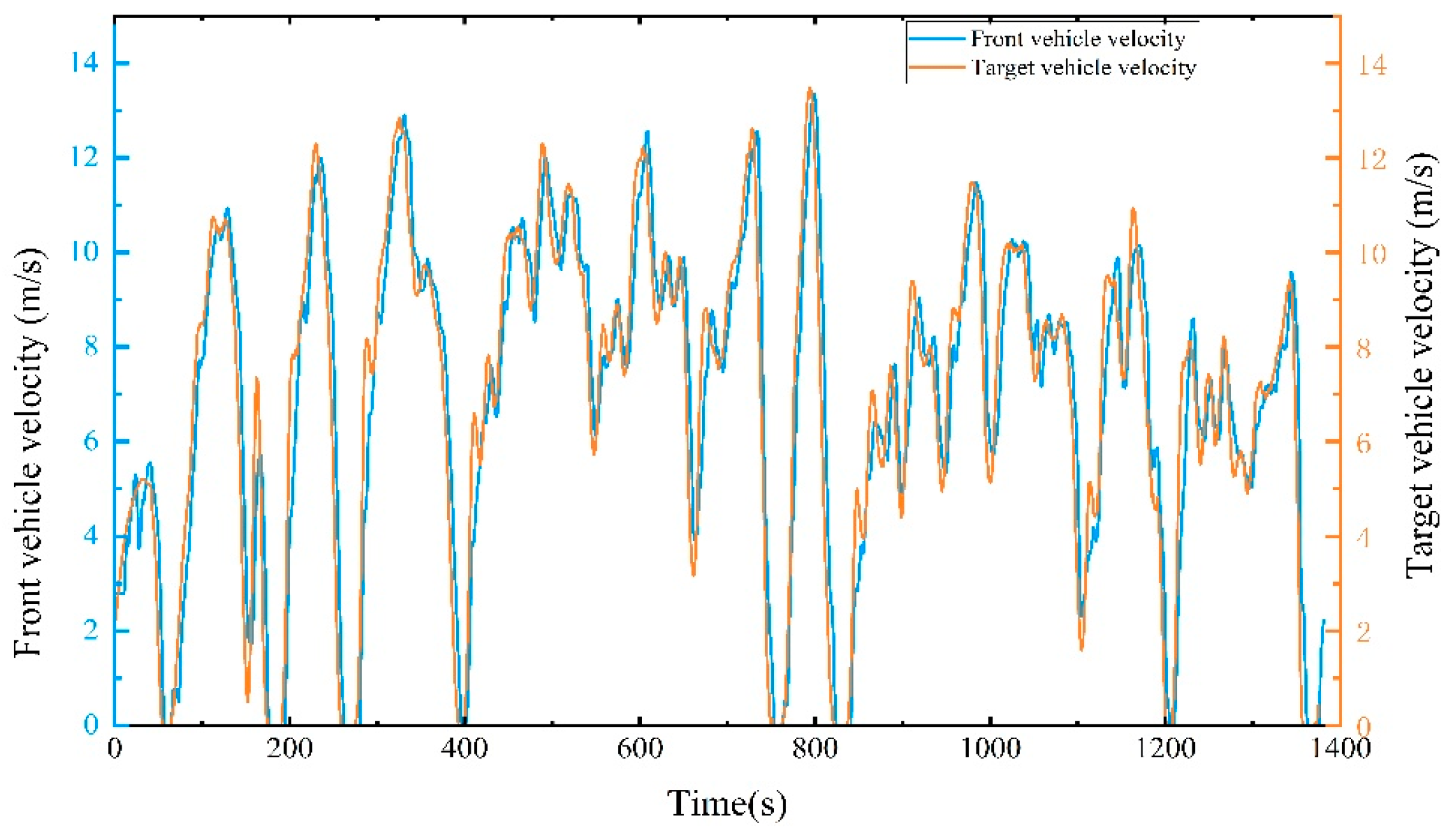
3.3. Following Distance and Velocity Planning Model
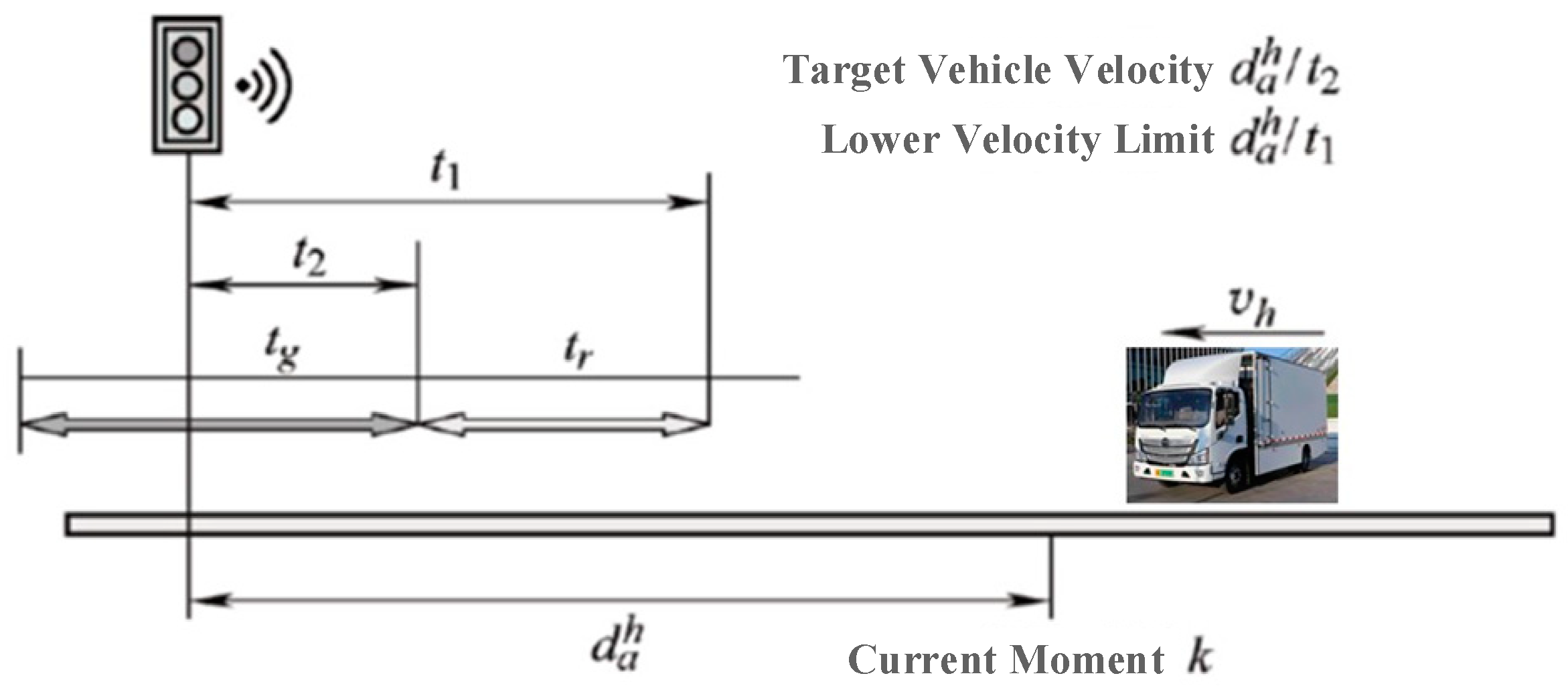
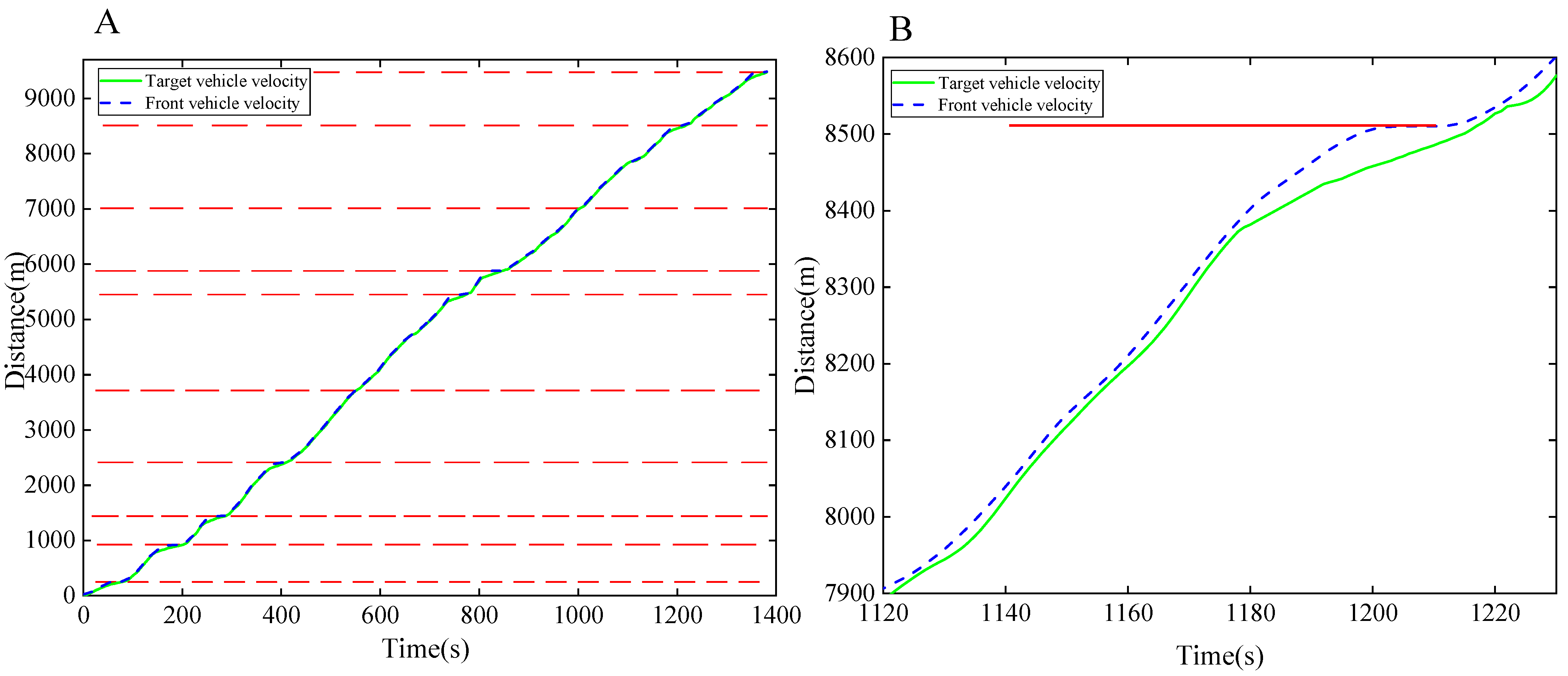
3.4. Vehicle Velocity Planning Model at Traffic Light Intersections
3.5. DP-Based MPC solver
4. Validation and Discussion
4.1. Optimization Effect of RBF Neural Network Prediction Model
4.2. Verification of the Effect of the Upper Layer Spacing and Velocity Planning Model
4.3. Verification of Velocity Planning Model at Traffic Light Intersection
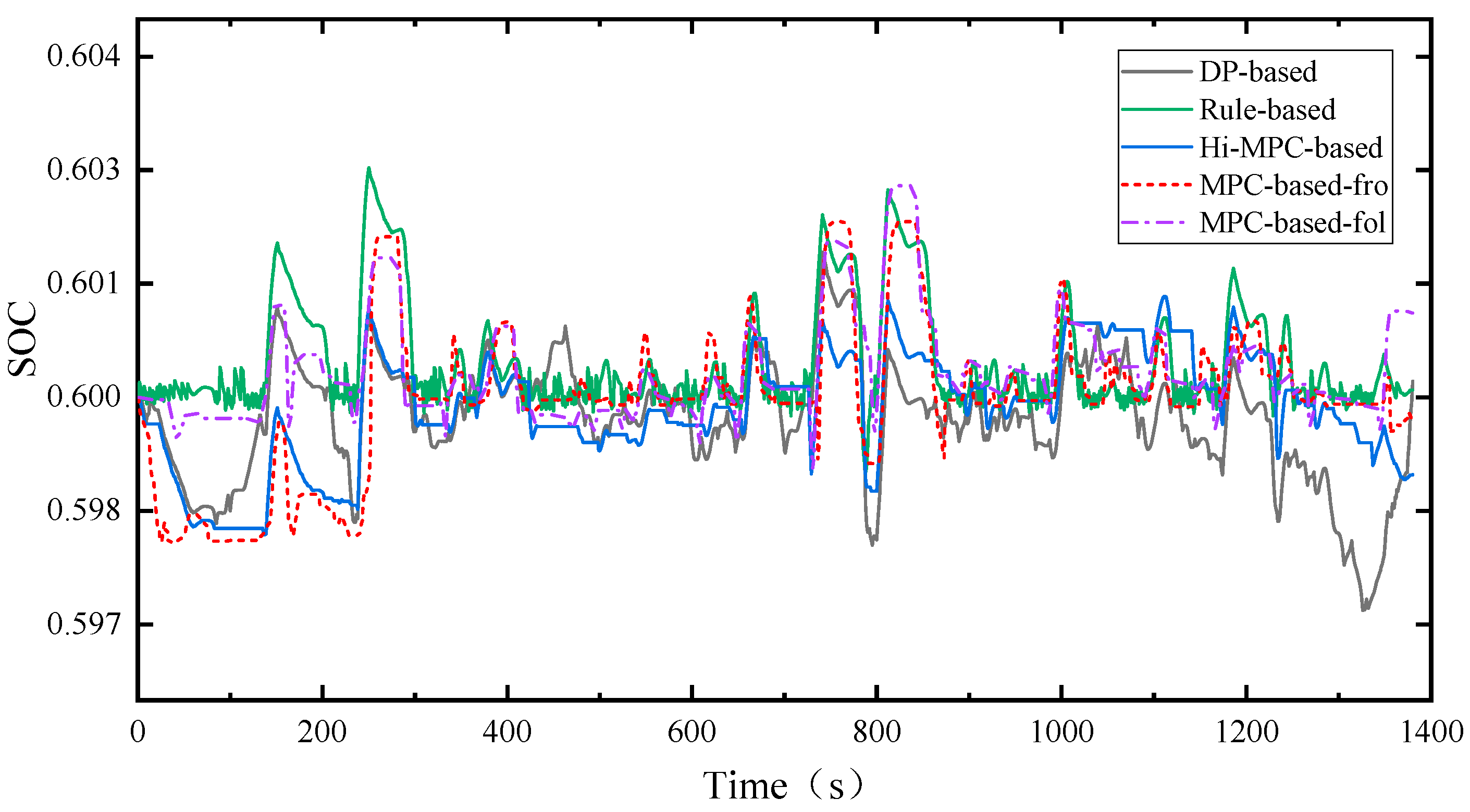
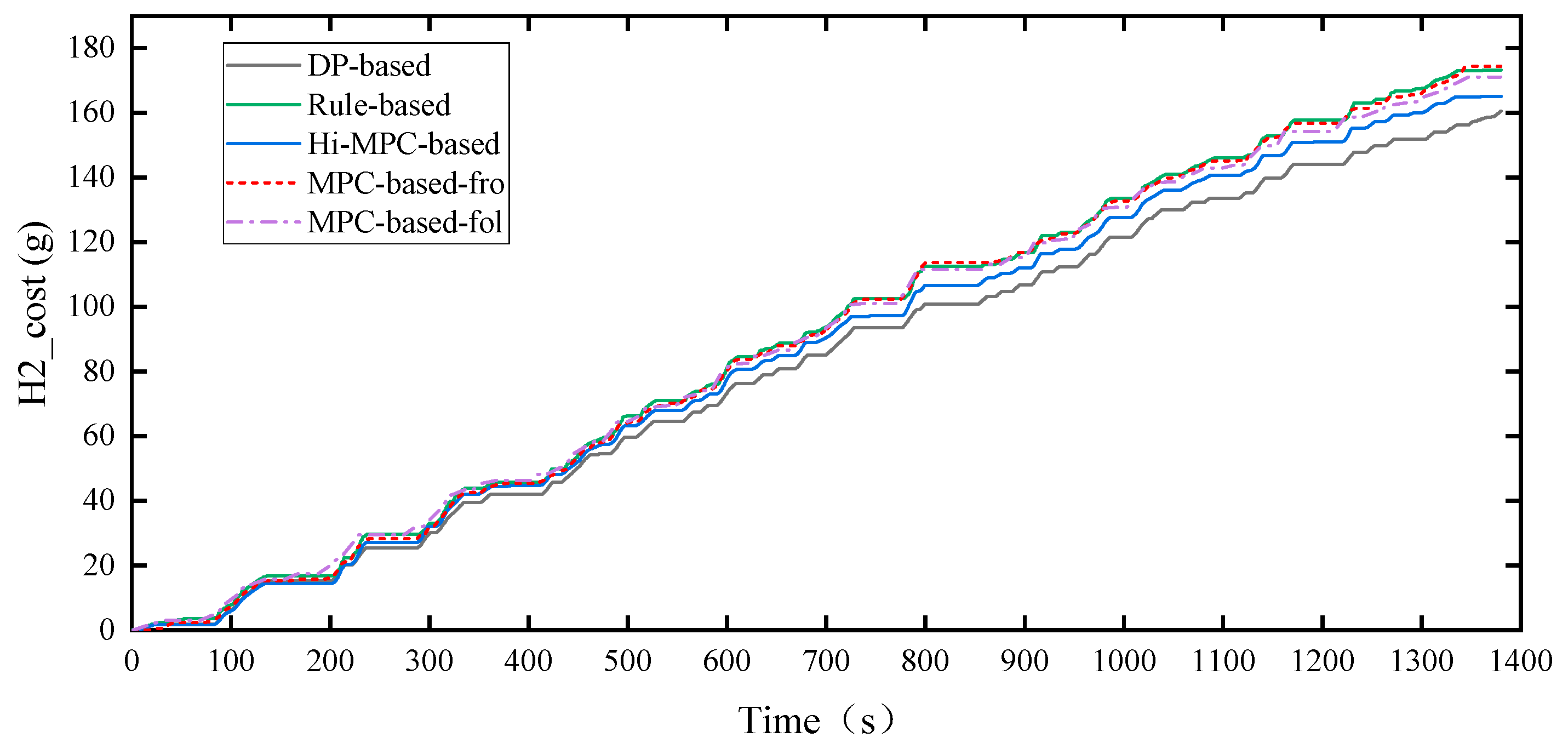
4.4. Overall Performance Verification of Hierarchical EMS
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahmadi, P.; Torabi, S.H.; Afsaneh, H.; Sadegheih, Y.; Ganjehsarabi, H.; Ashjaee, M. The effects of driving patterns and PEM fuel cell degradation on the lifecycle assessment of hydrogen fuel cell vehicles. Int. J. Hydrog. Energy 2019, 45, 3595–3608. [Google Scholar] [CrossRef]
- Hames, Y.; Kaya, K.; Baltacioglu, E.; Turksoy, A. Analysis of the control strategies for fuel saving in the hydrogen fuel cell vehicles. Int. J. Hydrog. Energy 2018, 43, 10810–10821. [Google Scholar] [CrossRef]
- Fernandez, L.M.; Garcia, P.; Garcia, C.A.; Jurado, F. Hybrid electric system based on fuel cell and battery and integrating a single dc/dc converter for a tramway. Energy Convers. Manag. 2010, 52, 2183–2192. [Google Scholar] [CrossRef]
- Sulaiman, N.; Hannan, M.A.; Mohamed, A.; Ker, P.J.; Majlan, E.H.; Daud, W.R.W. Optimization of energy management system for fuel-cell hybrid electric vehicles: Issues and recommendations. Appl. Energy 2018, 228, 2061–2079. [Google Scholar] [CrossRef]
- IoanSorin, S.; Nicu, B.; Phatiphat, T.; Mihai, V.; Elena, C.; Mihai, C.; Mariana, I.; Mircea, R. Fuel Cell Electric Vehicles—A Brief Review of Current Topologies and Energy Management Strategies. Energies 2021, 14, 252. [Google Scholar] [CrossRef]
- Shaohua, L.; Changqing, D.; Fuwu, Y.; Jun, W. A rule-based energy management strategy for a new BSG hybrid electric vehicle. In Proceedings of the 2012 Third Global Congress on Intelligent Systems, Wuhan, China, 6–8 November 2012; pp. 209–212. [Google Scholar]
- Changqing, D.; Shiyang, H.; Yuyao, J.; Dongmei, W.; Yang, L. Optimization of Energy Management Strategy for Fuel Cell Hybrid Electric Vehicles Based on Dynamic Programming. Energies 2022, 15, 4325. [Google Scholar] [CrossRef]
- Veer, S.K.; Om, B.H.; Dheerendra, S. Fuzzy logic and Elman neural network tuned energy management strategies for a power-split HEVs. Energy 2021, 225, 120152. [Google Scholar] [CrossRef]
- Trinh, H.-A.; Truong, H.-V.-A.; Ahn, K.K. Development of fuzzy-adaptive control based energy management strategy for PEM fuel cell hybrid tramway system. Appl. Sci. 2022, 12, 3880. [Google Scholar] [CrossRef]
- Yanwei, L.; Jiansheng, L.; Jiaqing, S.; Ye, J. Research on Energy Management Strategy of Fuel Cell Vehicle Based on Multi-Dimensional Dynamic Programming. Energies 2022, 15, 5190. [Google Scholar] [CrossRef]
- Hujun, P.; Zhu, C.; Jianxiang, L.; Kai, D.; Steffen, D.; Jonas, G.; Cem, Ü.; Andreas, T.; Lars, L.; Stefan, P.; et al. Offline optimal energy management strategies considering high dynamics in batteries and constraints on fuel cell system power rate: From analytical derivation to validation on test bench. Appl. Energy 2021, 282, 116152. [Google Scholar] [CrossRef]
- Jiayi, H.; Jianqiu, L.; Zunyan, H.; Liangfei, X.; Ouyang, M. Power distribution strategy of a dual-engine system for heavy-duty hybrid electric vehicles using dynamic programming. Energy 2021, 215, 118851. [Google Scholar] [CrossRef]
- Paganelli, G.; Delprat, S.; Guerra, T.-M.; Rimaux, J.; Santin, J.-J. Equivalent consumption minimization strategy for parallel hybrid powertrains. In Proceedings of the Vehicular Technology Conference, IEEE 55th Vehicular Technology Conference, VTC Spring 2002 (Cat. No. 02CH37367), Birmingham, AL, USA, 6–9 May 2002; pp. 2076–2081. [Google Scholar]
- Yuanjian, Z.; Liang, C.; Zicheng, F.; Nan, X.; Chong, G.; Di, Z.; Yang, O.; Lei, X. Energy management strategy for plug-in hybrid electric vehicle integrated with vehicle-environment cooperation control. Energy 2020, 197, 117192. [Google Scholar] [CrossRef]
- Lin, X.; Zhou, K.; Li, H. AER adaptive control strategy via energy prediction for PHEV. IET Intell. Transp. Syst. 2019, 13, 1822–1831. [Google Scholar] [CrossRef]
- Srinivasan, S.; Tiwari, R.; Krishnamoorthy, M.; Lalitha, M.P.; Raj, K.K. Neural network based MPPT control with reconfigured quadratic boost converter for fuel cell application. Int. J. Hydrog. Energy 2021, 46, 6709–6719. [Google Scholar] [CrossRef]
- Pereira, D.F.; da Costa Lopes, F.; Watanabe, E.H. Nonlinear model predictive control for the energy management of fuel cell hybrid electric vehicles in real time. IEEE Trans. Ind. Electron. 2020, 68, 3213–3223. [Google Scholar] [CrossRef]
- Xinyou, L.; Zhaorui, W.; Jiayun, W. Energy management strategy based on velocity prediction using back propagation neural network for a plug-in fuel cell electric vehicle. Int. J. Energy Res. 2021, 45, 2629–2643. [Google Scholar] [CrossRef]
- Xuncheng, C.; Shengwei, Q.; Jinzhou, C.; Ya-Xiong, W.; He, H. Proton exchange membrane fuel cell-powered bidirectional DC motor control based on adaptive sliding-mode technique with neural network estimation. Int. J. Hydrog. Energy 2020, 45, 20282–20292. [Google Scholar] [CrossRef]
- Huachun, T.; Hailong, Z.; Jiankun, P.; Zhuxi, J.; Yuankai, W. Energy management of hybrid electric bus based on deep reinforcement learning in continuous state and action space. Energy Convers. Manag. 2019, 195, 548–560. [Google Scholar] [CrossRef]
- Xuechao, W.; Jinzhou, C.; Shengwei, Q.; Ya-Xiong, W.; Hongwen, H. Hierarchical model predictive control via deep learning vehicle speed predictions for oxygen stoichiometry regulation of fuel cells. Appl. Energy 2020, 276, 115460. [Google Scholar] [CrossRef]
- Darbha, S.; Konduri, S.; Pagilla, P.R. Benefits of V2V Communication for Autonomous and Connected Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1954–1963. [Google Scholar] [CrossRef]
- Hongbo, G.; Shengbo, L.; GuoTao, X. Discrete-time model predictive control for lateral trajectory tracking of Intelligent cars. J. Command. Control. 2018, 4, 297–305. [Google Scholar]
- Qiuyi, G.; Zhiguo, Z.; Peihong, S.; Peidong, Z. Optimization management of hybrid energy source of fuel cell truck based on model predictive control using traffic light information. Control. Theory Technol. 2019, 17, 309–324. [Google Scholar] [CrossRef]
- Kaijiang, Y.; Junqi, Y.; Daisuke, Y. Model predictive control for hybrid vehicle ecological driving using traffic signal and road slope information. Control. Theory Technol. 2015, 13, 17–28. [Google Scholar] [CrossRef]
- Fengqi, Z.; Junqiang, X.; Reza, L. Real-Time Energy Management Strategy Based on Velocity Forecasts Using V2V and V2I Communications. IEEE Trans. Intell. Transp. Syst. 2017, 18, 416–430. [Google Scholar] [CrossRef]
- Chenglin, L.; Jianqiang, W.; Wenjuan, C.; Yuzhao, Z. An Energy-Efficient Dynamic Route Optimization Algorithm for Connected and Automated Vehicles Using Velocity-Space-Time Networks. IEEE Access 2019, 7, 108866–108877. [Google Scholar] [CrossRef]
- Xiaolin, T.; Shanshan, L.; Hong, W.; Ziwen, D.; Yinong, L. Research on energy control strategy based on hierarchical model predictive control in connected environment. J. Mech. Eng. 2020, 56, 119–128. [Google Scholar] [CrossRef]
- Hongwen, H.; Yunlong, W.; Ruoyan, H.; Mo, H.; Yunfei, B.; Qingwu, L. An improved MPC-based energy management strategy for hybrid vehicles using V2V and V2I communications. Energy 2021, 225, 120273. [Google Scholar] [CrossRef]
- Fengqi, Z.; Xiaosong, H.; Teng, L.; Kanghui, X.; Ziwen, D.; Hui, P. Computationally Efficient Energy Management for Hybrid Electric Vehicles Using Model Predictive Control and Vehicle-to-Vehicle Communication. IEEE Trans. Veh. Technol. 2021, 70, 237–250. [Google Scholar] [CrossRef]
- Pukrushpan, J.T.; Peng, H.; Stefanopoulou, A.G. Control-Oriented Modeling and Analysis for Automotive Fuel Cell Systems. J. Dyn. Syst. Meas. Control. 2004, 126, 14–25. [Google Scholar] [CrossRef]
- Shan-Jen, C.; Jui-Jung, L. Nonlinear modeling and identification of proton exchange membrane fuel cell (PEMFC). Int. J. Hydrog. Energy 2015, 40, 9452–9461. [Google Scholar] [CrossRef]
- Morari, M.; Barić, M. Recent developments in the control of constrained hybrid systems. Comput. Chem. Eng. 2006, 30, 1619–1631. [Google Scholar] [CrossRef]
- Shuo, Z.; Rui, X.; Fengchun, S. Model predictive control for power management in a plug-in hybrid electric vehicle with a hybrid energy storage system. Appl. Energy 2017, 185, 1654–1662. [Google Scholar] [CrossRef]
- Weiwei, X.; Enyong, X.; Weiguang, Z.; Haibo, F.; Jirong, Q. Optimal energy management of fuel cell hybrid electric vehicle based on model predictive control and on-line mass estimation. Energy Rep. 2022, 8, 4964–4974. [Google Scholar] [CrossRef]
- Jiankai, X.; Bo, S. Dung beetle optimizer: A new meta-heuristic algorithm for global optimization. J. Supercomput. 2023, 79, 7305–7336. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Vehicle total mass | 6000 | kg |
| Wheel radius | 0.375 | m |
| Gravitational acceleration | 9.8 | m/s2 |
| Air density | 6.125 | kg/m3 |
| Aerodynamic drag coefficient | 0.492 | - |
| Final drive gear ratio | 6.5071 | - |
| Transmission efficiency | 95 | % |
| Parameter | Symbol | Value |
|---|---|---|
| Number of cells in the stack | N | 300 |
| Full cell active area | A | 280 cm2 |
| Thickness of the membrane layer | L | 50 μm |
| Universal gas constant | R | k) |
| Faraday’s constant | F | 96,485.34 C/mol |
| Signal Lamp Number | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
|---|---|---|---|---|---|---|---|---|---|---|
| Green light duration (s) | 25 | 28 | 18 | 30 | 25 | 33 | 25 | 35 | 40 | 36 |
| Red light duration (s) | 40 | 69 | 52 | 70 | 66 | 76 | 80 | 65 | 70 | 50 |
| Cycle duration (s) | 65 | 97 | 70 | 100 | 91 | 109 | 105 | 100 | 110 | 86 |
| Distance from the starting point (m) | 223 | 897 | 1413 | 2388 | 3689 | 5425 | 5855 | 7037 | 8486 | 9452 |
| RMSE | Prediction Lengths | ||
|---|---|---|---|
| 5 s | 10 s | 15 s | |
| RBF | 1.8568 | 4.2762 | 6.7317 |
| DBO-RBF | 1.5976 | 3.9017 | 6.5687 |
| Improvement | 13.96% | 8.76% | 2.42% |
| EMS | Cost | Final SOC | E-Cost |
|---|---|---|---|
| DP-based | 160.584 | 0.6002 | 160.299 |
| Rule-based | 173.279 | 0.6001 | 173.138 |
| Hi-EMS-based | 165.009 | 0.5990 | 166.260 |
| MPC-based-fol | 171.051 | 0.6011 | 169.332 |
| MPC-based-fro | 174.371 | 0.5997 | 174.763 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Xu, E.; Zheng, W.; Huang, Q. Hierarchical Model-Predictive-Control-Based Energy Management Strategy for Fuel Cell Hybrid Commercial Vehicles Incorporating Traffic Information. Sustainability 2023, 15, 12833. https://doi.org/10.3390/su151712833
Xu Y, Xu E, Zheng W, Huang Q. Hierarchical Model-Predictive-Control-Based Energy Management Strategy for Fuel Cell Hybrid Commercial Vehicles Incorporating Traffic Information. Sustainability. 2023; 15(17):12833. https://doi.org/10.3390/su151712833
Chicago/Turabian StyleXu, Yuguo, Enyong Xu, Weiguang Zheng, and Qibai Huang. 2023. "Hierarchical Model-Predictive-Control-Based Energy Management Strategy for Fuel Cell Hybrid Commercial Vehicles Incorporating Traffic Information" Sustainability 15, no. 17: 12833. https://doi.org/10.3390/su151712833