1. Introduction
Sustainable transport refers to ways of moving people and goods that are ecologically, socially, and economically sustainable in the long term. This concept also promotes safe transport practices and measures to reduce the number of traffic accidents and injuries. These include safety initiatives, infrastructure design, the promotion of alternative modes of transport, education, and raising awareness of risks and safety measures among road users.
The integration of Intelligent Transportation Systems (ITS) is continuously enhancing the progress of sustainable transport. ITS represent sophisticated applications designed to offer innovative services to various modes of transport and traffic management. These applications entail the integration of telecommunications, electronics, and information technologies with transport engineering for the planning, design, operation, maintenance, and management of transport systems [
1]. An ITS aims to enhance traffic efficiency (by optimizing traffic flow and improving overall operational effectiveness), traffic safety (by incorporating safety features, such as collision avoidance systems, real-time monitoring, emergency response coordination, etc.), traffic management and control (by enabling the real-time monitoring and control of traffic conditions, adaptive signal control, dynamic route planning, etc.), environmental sustainability (by optimizing traffic flow and reducing congestion), and multimodal integration (by improving connectivity, increasing accessibility, and enhancing the overall mobility of passengers and goods). While ITSs offer immense potential to transform transportation, several challenges need to be addressed to achieve their full benefits, such as interoperability issues (a lack of standardization), privacy and security concerns (the collection and sharing of sensitive data), and regulatory and policy challenges (the rapid evolution of technology often outpaces regulatory frameworks), as well as financial and infrastructure limitations.
In the domain of ITS, a whole range of services is available and divided into several functional areas, such as passenger information, traffic management, in-vehicle support, and personal safety. These services use information and communication technologies, mobile applications, sensors, and data platforms to provide relevant real-time traffic information, including information directed to passengers and drivers about road conditions, public transport, parking, alternative transport, location, road hazards, and more. To achieve this, the concept of Cooperative Intelligent Transport Systems (C-ITS) has been developed, where the cooperation between the main actors of the transport network is considered: vehicles, drivers, and infrastructure [
2]. With the same purpose, the concept of the Internet of Vehicles (IoV) is derived from its previous domain, the Internet of Things (IoT). The IoV represents the developing framework in which vehicles sustain nearly continuous connectivity to the Internet, enabling the exchange of information between themselves and with other services [
3]. It is also considered an extension of Vehicular Ad Hoc Networks (VANETs), with a significant distinction in that VANET vehicles are not directly connected to a shared network but require additional information and communication infrastructure for connectivity [
4].
In this paper, the focus on safety is directed toward locations where various traffic streams or different transportation modes are integrated, such as railway crossings, intersections, pedestrian crossings, etc. Compared to other safety interventions, it is evident that in-vehicle warning systems have a great potential to increase safety at critical points in multimodal traffic, in terms of their impact on user behavior and considering that no major interventions are needed in existing infrastructure. The main guiding idea of this work was to investigate the available technologies and how they could be applied in a system that would be reliable and available to a wide range of users. The first step, described in
Section 2, was to investigate the impact of the information system on drivers, i.e., traffic safety, and thus to justify the need for such a solution. The second step was to research similar solutions and analyze them to determine whether there is space for improvement. In
Section 3, an overview of the available technologies that have the potential to meet the three main system requirements is given: to identify a location as a critical point, to spot a conflicting vehicle in real time, and to transmit this information to the user in a high-quality and timely manner. The reviewed literature offered valuable insights, upon which a novel driver information system architecture framework is proposed in
Section 4, which can contribute to the ongoing safety improvement in multimodal transport networks within the context of sustainable transport. The last section provides an analysis of the reviewed literature.
2. Driver Information Systems
Driving is a social phenomenon, necessitating interactions between all involved road users to guarantee smooth traffic flow and the safety of others [
5]. Such an interaction is very dynamic and includes tasks such as recognizing other road users, analyzing their behavior, communicating with them and, when needed, anticipating their future actions, and selecting an appropriate response accordingly [
6]. This leads to the conclusion that the safety of road users largely depends on users’ behavior.
With the development of ITS services, drivers are provided with additional decision support through various information systems. ITS are growing into systems that are based on the integration of a wide range of relevant technologies that can collect substantial amounts of data, process them, and then take appropriate actions in real time [
7]. Today, vehicles possess the potential for wireless communication with other vehicles and other entities in their immediate proximity to timely share safety-critical information (warnings) primarily to avoid or mitigate collisions. Furthermore, vehicles can be connected to traffic management systems via their accompanying network infrastructure to register any potential road hazards, as well as for guidance, to ensure more efficient traffic flow.
In terms of increasing traffic safety, one of the most used ITS approaches are driver information systems, which provide real-time information about incidents, possible dangerous conditions on the road, etc. This information increases the driver’s awareness of the environment and reduces distractions and their reaction time, which subsequently reduces the risk of accidents.
Driver information systems were mentioned as early as 1975, and with the development of sensory and communication technologies numerous driver warning systems were developed, and studies were conducted on their reliability and efficiency. Only with the rapid development of technologies in the last decade, and their wide application, is more specific research involving technologies such as C-ITS and the IoV being carried out. The swift development of autonomous driving and sophisticated telematic driver assistance systems have notably enhanced vehicle safety. These systems primarily rely on sensors integrated into the vehicle, aiding drivers in decision-making to enhance their self-awareness and mitigate the risk of traffic accidents. While such systems are already widely used in road traffic across Europe and are paving the way for autonomous vehicles, there are very few attempts to achieve the same in a multimodal traffic environment. In the following section, an explanation of why warning systems are essential for increasing traffic safety in terms of their impact on the user is given, and several papers will be presented that propose such systems applicable to a multimodal environment.
2.1. Influence on the Driver’s Behavior
The complex interaction between the entities of different modes of transport is often unpredictable because of the road user’s behavior, and the impact of any system primarily depends on its impact on the road user, specifically, the extent to which the user obeys the system. Driver disobedience can be intentional (when drivers or pedestrians are aware of their surroundings and understand the warning signs but still deliberately ignore them) or unintentional (when they do not notice changes in the environment and/or do not understand warning signs and consequently approach a critical point even with the presence of danger). Furthermore, often the focus of the driver’s attention is not on the location that they are approaching, nor on their observation of the environment; drivers more often rely on the warning signals installed in the traffic infrastructure and on the behavior of their surrounding vehicles as a way of warning them of changes in road conditions, especially drivers with less experience in traffic [
8]. Recent research shows that in-vehicle or smartphone warning systems can have a notable influence on driver and pedestrian behavior, particularly when perceived as credible and reliable. Their impact on users in different studies was analyzed in simulation environments, through field tests, or by surveys. Simulator testing revealed that participants are more inclined to adopt ITS technologies at critical points with passive signaling (traffic signs and protective fences) than with active signaling (changing lights and sound signals or active barriers) and that they prefer the systems that are the simplest to use [
9]. Also, presenting excessive and unnecessary information can potentially confuse or distract drivers. Therefore, the system should only display the essential information required to effectively assist the driver in decision-making [
10]. Solutions for informing drivers at passive crossings resulted in driver behavior similar to that at active crossings [
11]. Also, behavior improves in areas where drivers are more prone to riskier driving [
12]. In general, the implementation of a driver information system significantly improves driver behavior around critical points in terms of observing the environment (in multiple directions), their braking response, and their approach speed [
12]. The approach speed was decreased for all routes with a straight initial segment. However, for horizontal routes incorporating sharp turns and stop signs, the approach speed increased slightly. Despite this, drivers slow down more intensively with the application of the system [
13]. On the negative side, with the active warning system participants’ obedience to the STOP sign decreased by 16.5%, but in the case of system failure, most participants had no difficulty in detecting road hazards despite not receiving any warning message [
14], meaning that in-vehicle warning systems can have a sustained impact on driver behavior even after the system has been removed or is no longer active [
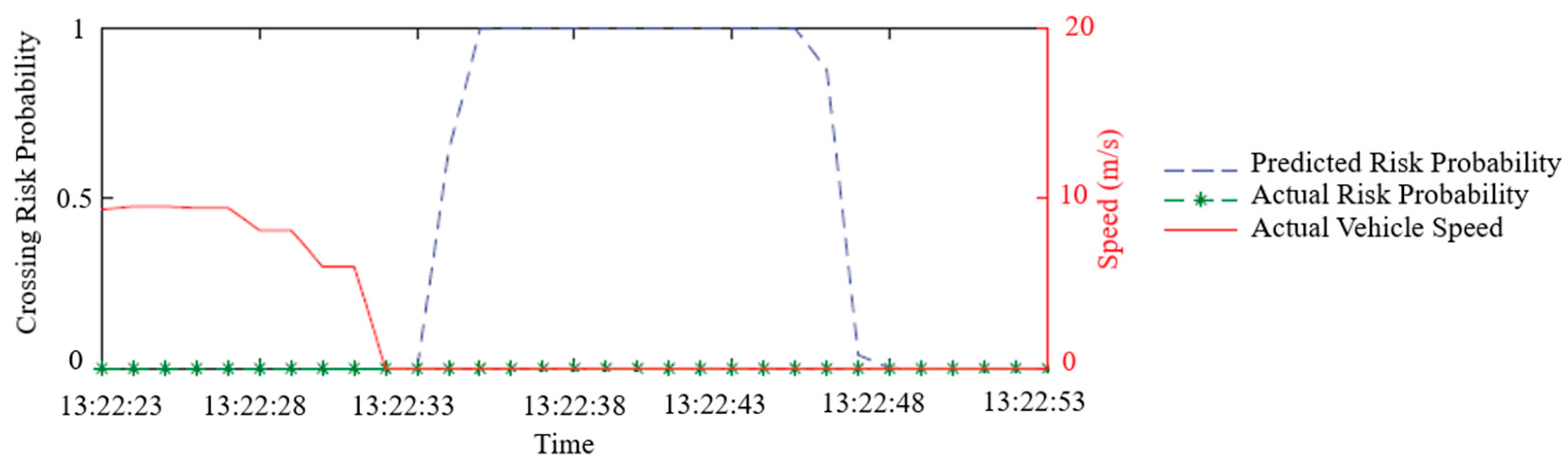
15]. Field research [
16] shows that the predicted crash risk decreases as the approach speed decreases (
Figure 1).
Based on the conducted tests, it is evident that a warning system enhances drivers’ behavior over time, but no immediate effect has been confirmed. Moreover, the individual’s personality significantly influences the effectiveness of the system, therefore, it is imperative to undertake more comprehensive research across diverse scenarios within the multimodal traffic network. Despite numerous simulation tests demonstrating impressive results, field tests at critical multimodal points are still limited. It remains uncertain whether in-vehicle warning systems can maintain equal reliability in real-world field conditions [
17].
2.2. Existing Examples of Driver Information Systems in a Multimodal Environment
Several examples of driver information systems are described below, with an emphasis on level crossings as the most critical points in a multimodal environment. In the available literature, in-vehicle warning systems are mostly related to autonomous driving, and it is necessary to further investigate the possibilities of applying these technologies at a higher level.
2.2.1. Critical Crossing Points of Rail and Road Traffic
When observing the interaction of different traffic modes, the most critical points of the traffic system are level crossings, therefore, they are taken as a reference example for the analysis of a warning system’s application. Level crossings are characterized as locations where a railway line or an industrial track intersects with a road at the same level. This definition may also encompass crossings involving pedestrian and bicycle paths, as well as other roads designed for the passage of people, animals, vehicles, or machinery [
18]. While accidents at these critical points may not occur frequently, their consequences are significantly more severe than other traffic accidents, impacting individuals, society, and economies on a substantial scale. Due to the large disparity between the train’s mass and the road vehicle, most accidents involve serious injuries and fatalities. Also, secondary consequences include damage to vehicles, trains, and infrastructure, the disruption of critical supply chain links, the environmental impact in the case of the transportation of hazardous materials, etc. [
19]. Even with the abundance of technological systems designed to enhance safety at these critical points, accidents persist, and their consequences are consistently deemed the most severe, compared to other traffic-related incidents [
20]. According to the Annual Safety Report for the year 2021 in the Republic of Croatia, out of 80 serious accidents and accidents in railway traffic, 35 occurred at level crossings, in which 6 people died (out of a total of 10) and 7 people were seriously injured [
21]. At the EU level in the same year, 234 people were killed at level crossings, and an equal number of people ended up with serious or life-threatening injuries, which makes level crossings the second largest cause of death in railway traffic [
22].
The prevalent safety measures for level crossings typically involve infrastructure modifications that alter the road or pedestrian crossing levels, along with physical warning signals for road users. Passive signaling, while a straightforward and cost-effective solution, is more prone to human disobedience than active signaling. Active signaling systems commonly rely on sensor devices positioned at a specific distance from the crossing, detecting train arrival and transmitting the information to sound signaling devices installed at the level crossings [
23]. At the EU level, out of approximately 105,000 registered level crossings, only 45% of them are provided with active signaling [
9], while in the Republic of Croatia, it is only slightly more than 20% of the 1500 registered crossings [
9,
21]. Most of the research in the field of level crossing safety deals with the improvement of existing technical solutions, such as more advanced train detection [
24], more effective warnings [
25], better information transmission within the railway environment [
26], warnings to train drivers about obstacles on the track [
27], etc. Although these and similar studies offer high-quality solutions, they lead to minor system design changes that have only marginal effects on safety, considering that accidents at level crossings mostly occur due to irresponsible drivers’ and pedestrians’ behavior: their wrong decision-making or just their unawareness of the environment.
According to previous research, driver information systems can be divided into two basic groups: warning systems about approaching a critical point based on historical data [
17,
19] and warning systems about an approaching train based on real-time data [
13,
16,
28]. The first group does not use real-time data on the approaching train, but does use the location of the vehicle to decide whether to display the warning.
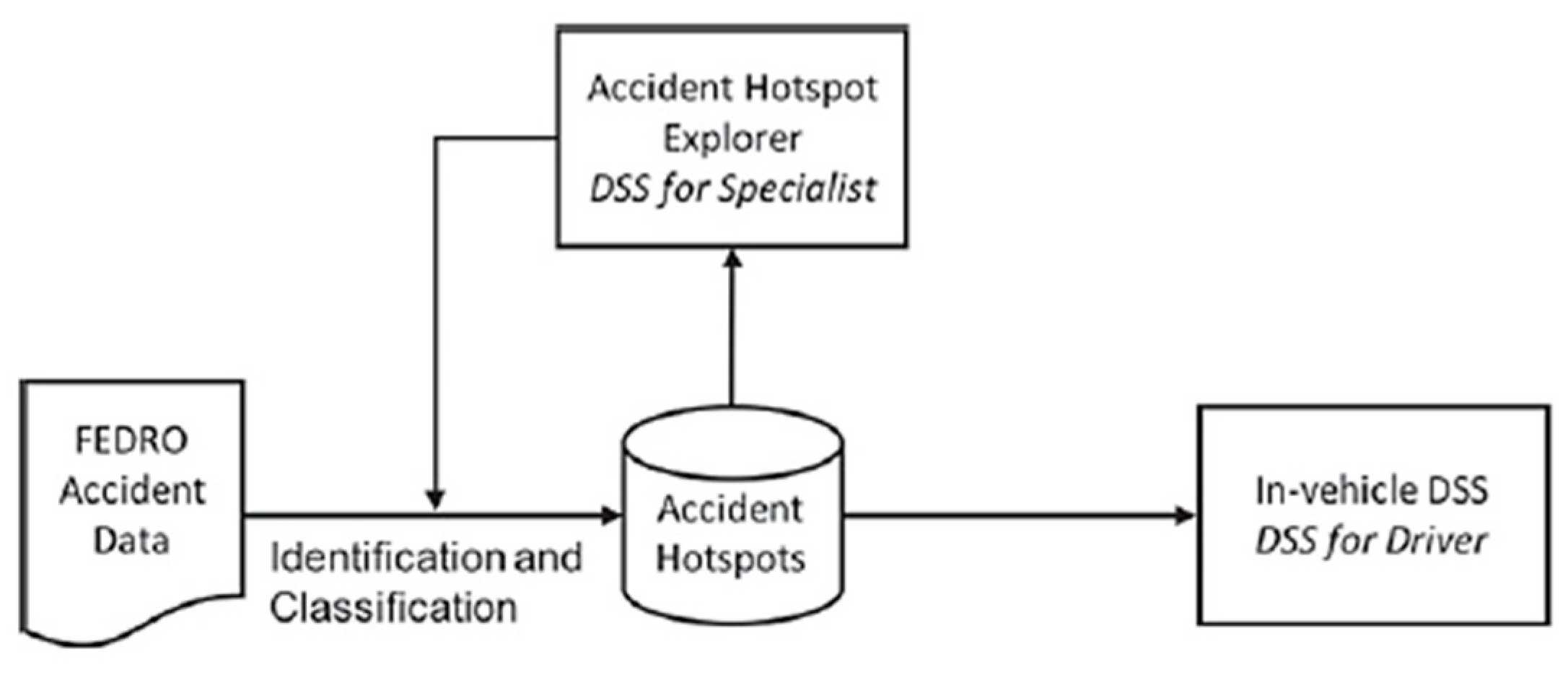
In the study [
17], the authors designed and evaluated (in an actual real-world setting) an extensive in-vehicle Decision Support System (DSS), which is presented in
Figure 2. This system offers information about critical points through location analysis applied to a nationwide dataset of historical accidents, comprising over 266,000 accidents. The in-vehicle unit uses the Density-Based Clustering Algorithm (DBSCAN) to identify and classify critical points. The output informs the driver that he is approaching a critical crossing.
The authors in [
19] proposed an early warning system for oncoming trains based on a wide range of available data, including the train’s schedule. The data sets were incorporated into a Geographic Information System (GIS), with various analyses conducted to evaluate and characterize different locations more thoroughly. The system notifies drivers, using the onboard navigation unit, of an oncoming train, allowing users to efficiently assess the best available route.
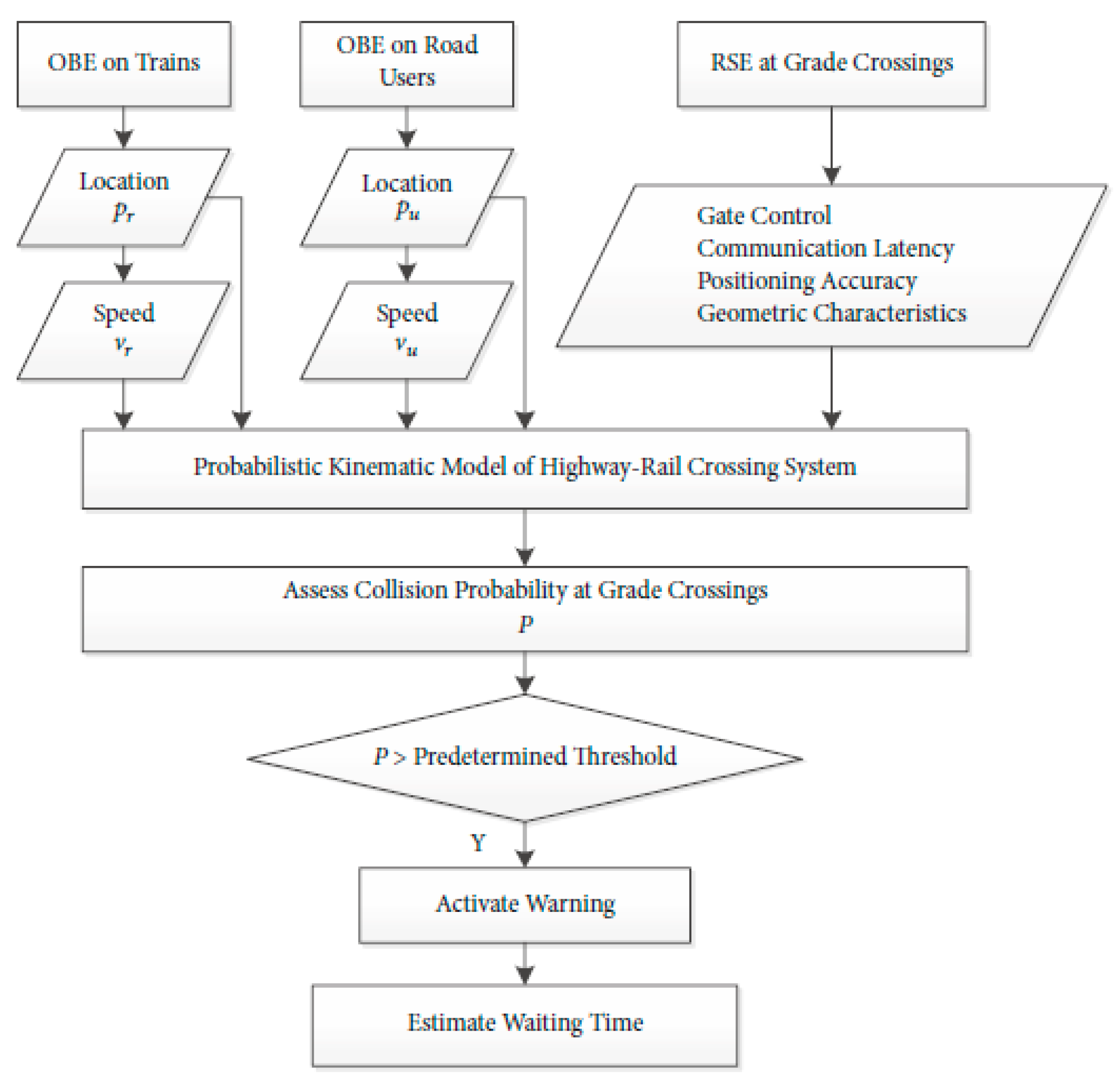
In research involving real-time data, the system architecture consists of two main elements: on-board equipment and infrastructure equipment. In study [
16], the device installed on the Roadside Equipment (RSE) utilizes static information, encompassing geometric characteristics and positioning accuracy parameters for collision risk assessment. The On-Board Equipment (OBE) obtains location data from its Global Navigation Satellite System (GNSS) module, enabling the calculation of the approach speed and travel direction. Combining this information with data stored in the RSE, the system initially estimates the actual location, accounting for latency and user behavior. Subsequently, the system assesses the collision probability using a mathematical collision risk assessment model. If the probability surpasses a predetermined threshold, a warning is activated and promptly transmitted to road users. Simultaneously, the road user can receive a time estimate for how long it will take the train to pass (
Figure 3). Communication between the devices takes place via Dedicated Short-Range Communication (DSRC).
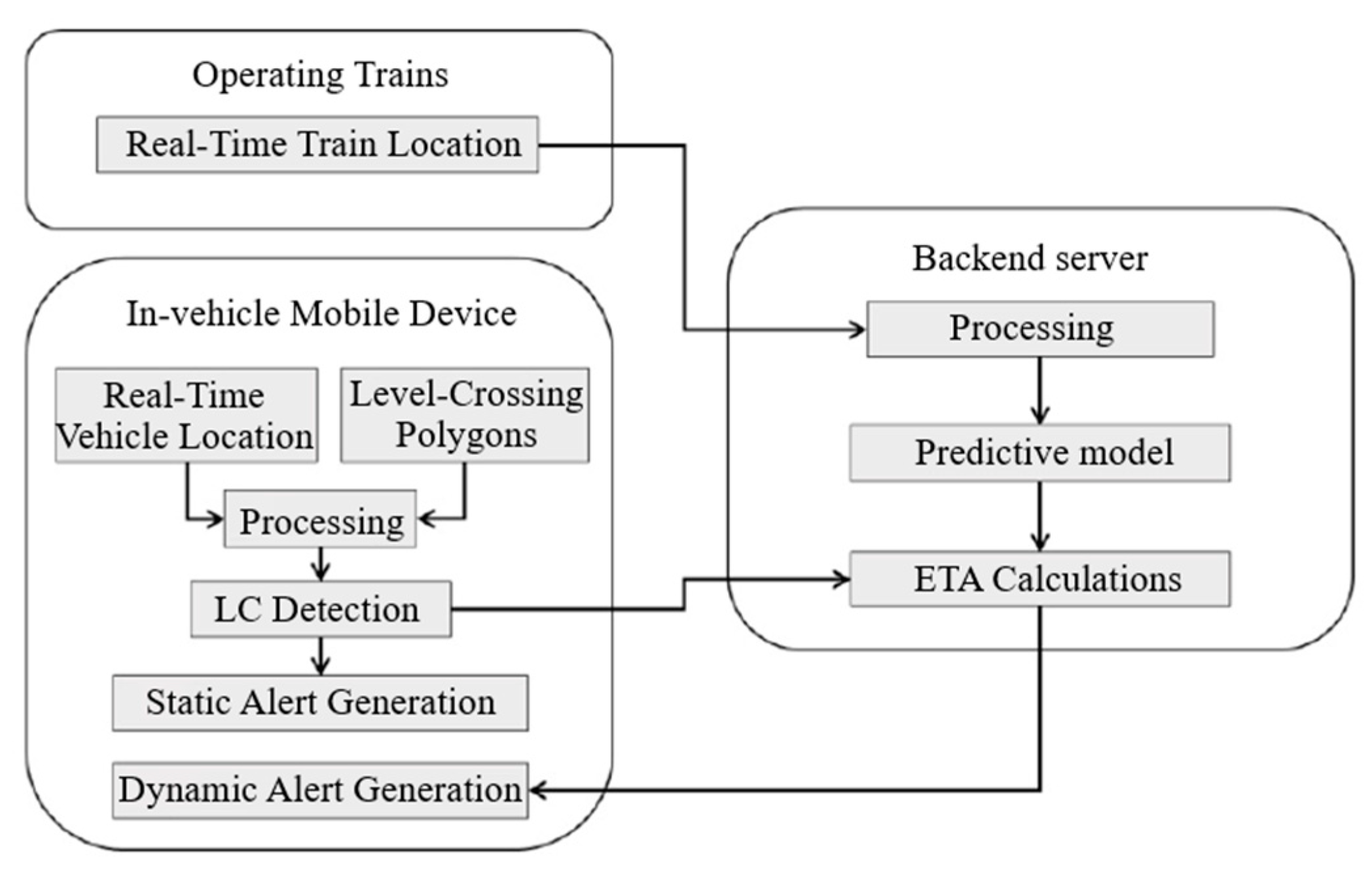
The authors of studies [
13,
28] investigated the safety impact of the C-ITS service as part of the SAFER-LC project. The main elements of this system are a module for train monitoring and arrival time estimation, and a module for vehicle tracking and communication, with a dedicated web service that enables data exchange and storage (
Figure 4). This system gives the driver two forms of messages: a static alert about a level crossing ahead, and a dynamic alert about the approaching train, including the estimated time of arrival. The calculation of the train’s anticipated arrival time relies on factors such as the trains’ current position and speed, with predictions generated through the utilization of machine learning algorithms, i.e., neural networks. The warning system uses mobile communication, delivering alerts through a pop-up window on navigation devices located within the vehicle. The critical area is determined using two predefined polygons: the road network polygon includes all sections of the road leading to the level crossing within a radius of 80 m from the railway, while the railway polygon includes railway tracks at a distance of approx. one kilometer from the level crossing in both directions. An audio-visual warning is generated when the vehicle enters the polygon, or when the train and the vehicle are in the same group of polygons.
The LeCross study [
29] analyzed the concept of a satellite system that enables reliable information about approaching trains at level crossings with passive signaling. The service uses satellite communication and navigation systems. Instead of a trackside detection system, information about the train’s arrival is delivered to the level crossing equipment using wireless communication systems. Its implementation requires a back-end server for data transfer, as well as a communication platform that can distribute information across remote areas. The server maintains an up-to-date database on the train’s position and calculates the train’s arrival time. Warnings are transmitted via a satellite link whenever the train is within a certain distance of the crossing. The system requires the installation of a smaller satellite terminal unit on the level crossing with an interface for users, which enables a two-way connection with the central server. By default, the system runs in failsafe mode: the assessment is made by the trackside unit independently of other systems and is triggered by the lack of the train’s position message when expected. This architecture has the added advantage of a centralized data model and communication platform that can be used to deliver additional information.
The authors of [
30] proposed a system that combines Vehicle-to-Vehicle (V2V) and Vehicle-to-Infrastructure (V2I) communication. The system is based on DSRC, and it works in two types of cases. In the first case, the driver receives the warning directly from the train. This type of communication is favored in situations where the radio channel between the train and the vehicle has a strong line of sight. In the second case, a DSRC receiver positioned at the level crossing intercepts the warning from the train and may subsequently resend it to the vehicle. Alternatively, it produces a warning in the form of light and sound for vehicles lacking a DSRC radio.
A step further was taken by the authors of [
31]. In their work, they presented a DSRC/Wi-Fi hybrid system that acts as a one-way broadcast mechanism for transmitting important information to drivers whose On-Board Units (OBUs) are designed for Wi-Fi reception only. Essential information is routed through the Road Side Unit (RSU) from the trains’ DSRC OBU to the Wi-Fi OBU in the vehicle. The Wi-Fi transmission is based on custom beams that serve a similar function to the roadside warnings in DSRCs but with a configurable repeat interval.
2.2.2. Extended Driver Information Systems—The Smart City Concept
Researchers [
32] presented the 5G mobile technology-based concept of an IoT architecture for collision avoidance systems in smart cities. The cloud-based system functions as traffic management, and it collects data about the environment through distributed applications and sensors and manages all traffic control procedures. With modern vehicles able to communicate with RSUs, the system encompasses all traffic entities, including vulnerable road users. The system architecture (
Figure 5) can be divided into three segments: data input, transmission and processing, and data output. The first segment represents the data input from different sources, such as cameras, radars, and users’ applications, which are employed for the identification and categorization of individual road users. The data is transferred through a 5G network and processed in the cloud. AI-based processing enables the identification of the location, velocity, and direction of users, and based on this information it predicts collision probability. Processed data are transmitted through optical or acoustic devices or users’ warning applications. The advantages of this architecture are that even vehicles without communication technology or other road users can be incorporated into the system. The authors emphasize the particular importance of using the 5G network due to its low latency, high bandwidth, larger number of networked participants, and data processing beyond the capabilities of previous wireless technology.
In study [
33], the authors propose an in-vehicle warning system to avoid collisions with cyclists in the area of a bicycle path at an intersection in a Connected Vehicles (CVs) environment. Based on the 118 collected trajectories of vehicles turning to the right, the behavior of drivers when turning was investigated. The authors proposed an algorithm for calculating the time of entry into the critical area in different circumstances and identifying potential places of collision between vehicles and bicycles around the bicycle path. The critical point can be predicted based on vehicle and bicycle speeds and their location information. The warning system is primarily built on the conceptual foundation of Vehicle-to-Bicycle (V2B) communication, operating under the assumption that the driver or vehicle is aware of the bicycle’s position through GNSS data. The proposed system aims to enhance driver readiness for impending right-turn maneuvers, contributing to the overall improvement of traffic safety at intersections.
Study [
34] considers a pedestrian collision avoidance system designed for low-speed autonomous shuttles, relying on Vehicle-to-Pedestrian (V2P) communication. This system is particularly relevant in situations where pedestrians are not detectable by line-of-sight sensors such as cameras, radar, and Light Detection and Ranging (LiDAR); V2P communication based on pedestrian smartphones and DSRC is used for their detection and positioning. In such scenarios, the vehicle takes the action of either coming to a stop or, if feasible, maneuvering around the pedestrian. In study [
35], the authors investigated the extension of vehicle crash avoidance systems to smartphone-equipped participants. Given the limited functionalities of smartphones in contrast to OBUs, the authors proposed the support of Multi-access Edge Computing (MEC). The MEC-based system architecture includes three main segments: users (i.e., vehicles and vulnerable users), the access points of various technologies, and collision detection servers. They conclude that, thanks to MEC, a system traditionally used in vehicles can be extended to vulnerable users. In their working paper [
36], the authors consider communication between vehicles and vulnerable users through an Android smartphone application based on Bluetooth technology. The proposed system analyses real-time data from a smart intersection close to vehicles and vulnerable users and informs them of having trajectories with potential collision risk. Systems based on smart devices open up the possibility of wide application of warning systems in challenging areas of the multimodal transport network.
3. Driver Information System Architectures—Components and Technologies
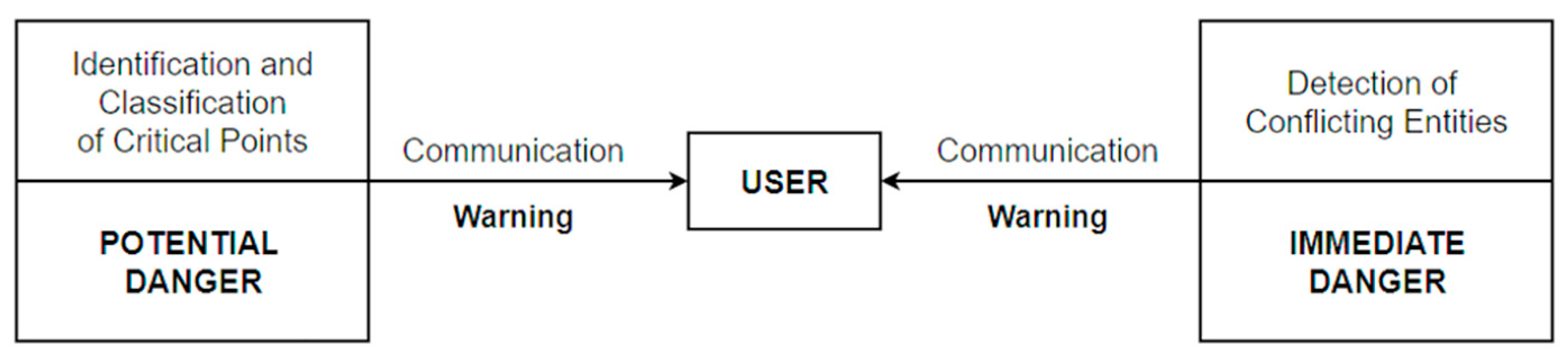
Based on the reviewed system models in the previous chapter, it was concluded that an advanced system, applicable in a multimodal environment, must meet three main requirements: the identification of critical points, the detection of conflicting entities, and real-time and reliable communication between vehicles and/or users (
Figure 6). The identification of critical points enables the driver to be informed of approaching a potentially dangerous location, thereby increasing his awareness of the environment, while the detection of conflicting vehicles provides information on the real immediate danger, enabling a better reaction of the user and thereby avoiding a potential collision. Both requirements must be based on reliable real-time data transfer to influence the user at the right time, thus increasing traffic safety.
For a high-quality information system solution, it is necessary to combine several segments from different research areas, such as different methods for data analysis and processing, identification and classification, and available technologies for detection and communication that could be applicable in a multimodal environment. Also, regarding architecture definition, it is essential to define the physical, logical, and communication components of the system, which are presented below.
3.1. Identification of Critical Points in a Multimodal Environment
Currently, numerous solutions in the transportation sector rely on consistent and dependable spatial data. For the high-quality identification and classification of critical points, it is necessary to connect their safety features with the spatial component. So, the first step is to list potentially dangerous locations, which requires location data for all points where multiple modes of transport meet at the same level. Furthermore, classification according to the hazard criteria requires data on technical equipment and comprehensive historical data on accidents, specific to each location [
23]. The available data in the EU about transport are quite limited. According to the Official European Data Portal, the subject of traffic occupies only 3.75% of the total number of available data sets, and their quality and quantity vary depending on the source [
23]. The data sources are also different in terms of their functionality, characteristics, and quality of service, and the main challenge, besides the lack of publicly available data sets, is their uneven distribution across subdomains [
37].
In the last six decades, the analysis of critical points’ accidents has been thoroughly carried out, leading to the development of numerous methods. However, classical methods often overlook the accidents’ spatial aspects [
17]. In modern computer science, numerous methods and algorithms have been developed that can collect and process a large amount of data (location, time, number of fatalities, severity of injuries, type of vehicle, and other relevant information) and perform qualification according to the given conditions. Many studies are devoted to identifying different patterns of traffic accidents, considering temporal, spatial, and other influences (holidays, days of the week, peak hours, location of the accident, road geometry, type of accident, cause of accidents and liability, weather conditions, etc.). The authors of these studies use methods such as different clustering algorithms [
38,
39], fuzzy pattern recognition [
40], random forest analysis [
41], etc.
Considering the limitations of the available data and their incompatibility with more advanced processing methods, simpler risk assessment methods would be more suitable for identifying critical points, especially for parts of traffic networks where accidents are not frequent. According to the example of basic risk assessment at level crossings [
42], the first step in identifying critical or high-risk points is to create a list of all crossings where incidents have been recorded in at least the last five years. For each transition, the frequency or number of accidents is determined, and divided by the number of years considered. After determining the frequency, the consequence is determined, i.e., the number of fatalities in one accident. Using the equation [
43]
the frequency factor
X and the consequence factor
Y are multiplied to obtain the risk index ℜ. Depending on the values of the risk index, based on qualitative methods, the authors determine the intervals of the indices that represent an acceptable, marginal, and unacceptable degree of risk. In a more advanced analysis of the safety level [
44], all level crossings on one section of the railway were observed, including individual level crossings with passive signaling, which have a history of accidents. A multi-criteria fuzzy model consisting of 15 criteria and 8 alternatives was formed, and data on serious accidents, accidents, incidents, and the number of deceased and injured persons were considered. Based on the obtained results, the authors proposed measures to increase the safety of individual level crossings.
The two mentioned risk assessment methods determine the level of danger at certain critical points but do not attach a spatial component to them. In study [
19], the features of critical places, with their geospatial components, were analyzed through the Geographic Information System (GIS) to determine the causes of the reduction in the effectiveness of traditional security measures. The proposed method evaluates data from several sources, which relate to geospatial information about the multimodal transport network in the observed area, the safety features of the crossings, train schedules, historical information about accidents (frequency, financial damage, injuries, and deaths), daily population migrations, etc. Data analysis revealed patterns in transport traffic and the historical frequency of accidents, based on which locations were singled out as potential candidates for the installation of an advanced warning system.
The authors of [
17] used the DBSCAN to identify critical points using geolocated accident records. The DBSCAN classifies the elements into clusters by organizing them so that the density of the elements inside each cluster is higher than outside the cluster. Elements not associated with any group are designated as noise or considered “forests”. Consequently, the identified clusters can be recognized as critical points with a substantially higher accident density compared to other regions. Noise elements signify “random” accidents, indicating minimal or no spatial dependence on other accidents. The effectiveness of DBSCAN in recognizing clusters is highly dependent on the chosen distance between points within the same cluster and the minimum number of points required to form a cluster. There is no universally optimal selection for these parameters, and relying on domain expertise is recommended to determine the most suitable values based on the objectives of the analysis. According to the recommendation of experts, the authors defined conditions for the identification of critical points: at least ten accidents must have occurred within 15 months at the observed location over five years. With these parameter settings, the authors successfully identified the critical points. Their further classification was based on the output message to the user, consisting of three pieces of information: “What”, “Why”, and “Where”, where more than 50% of the involved accidents must have shared the same predominant contextual detail information.
The aforementioned studies proposed methods for the identification and classification of critical points in specific examples of a multimodal environment. However, there are numerous other papers in the field of artificial intelligence that study methods such as machine learning [
45,
46,
47,
48] or data mining [
49] applicable in the field of traffic. These methods have huge application potential in the driver warning system due to the possibility of processing a large amount of data, including historical and real-time data.
Through the mentioned studies, it can be concluded that the choice of the identification and classification methods of critical points depends on what part of the multimodal network is being observed. For example, level crossings are fixed points in space; their number is far less than, for example, the number of intersections in urban areas, and accidents at these locations do not occur as often. Therefore, a simple method of risk assessment is sufficient for such locations. On the other hand, the urban multimodal environment is extremely dynamic, and critical points are not necessarily connected to intersections, but can appear anywhere on the traffic network. For their identification and classification, it is necessary to collect and process large amounts of data from different sources, which requires a more complex method from the field of artificial intelligence.
3.2. Detection of Conflicting Entities in a Multimodal Environment
Obstacle detection is one of the key aspects of research in the field of driver DSSs. Reliable detection includes the analysis of different types of obstacles, sensor characteristics, and environmental conditions. While roadside driver assistance systems and autonomous driving systems are well-researched in this regard, the methods developed for structured urban roads may fail in a multimodal environment due to their uncertainty and diversity. In principle, there are two sources of data about the environment: those from the vehicle’s built-in sensors and other vehicles or from nearby infrastructure. Autonomous vehicles use a variety of sensors to perceive their surroundings and navigate safely. The main sensors employed in autonomous vehicles include LiDAR, radar, cameras, ultrasonic sensors, and Inertial Measurement Unit (IMU) sensors [
50,
51]. LiDAR sensors use laser beams to measure distances and create detailed 3D maps of the vehicle’s surroundings and are very effective in detecting objects and obstacles [
52]. Radar sensors use radio waves to determine the range, angle, and velocity of objects around the vehicle and are commonly used for object detection and collision avoidance [
53]. Cameras capture visual information, enabling the vehicle to recognize and interpret traffic signs, lane markings, and other objects [
54]. Ultrasonic sensors use sound waves to detect objects in close proximity to the vehicle and are often used for parking assistance and low-speed obstacle detection [
55]. IMU sensors measure the vehicle’s acceleration, angular rate, and sometimes magnetic field orientation so that they can give information on the vehicle’s motion and orientation [
51].
Unlike typical object detection, detection that refers to a vehicle of a different mode of transport, such as a train, has different limitations. The communication environment near level crossings is similar to road intersections for vehicles, but the line of sight is a function of geometry for which greater visual blockages are possible [
30]. Therefore, commercial sensors installed on vehicles are not reliable for train detection. LIDAR sensors have a typical detection range of 120 m, but their range is limited by technical factors such as power requirements and target reflectivity. The intensity of infrared beams is also limited by eye safety regulations. Therefore, currently available automotive LIDAR sensors cannot detect a train early enough [
56]. The sensors capable of detecting objects up to one kilometer away are cameras and radars. Radars intended for adaptive cruise control applications have a detection range of up to 250 m but have a narrow beam of detection, usually ±6–9°, and vegetation or weather conditions can limit visibility [
56]. So, relying only on sensors does not provide sufficiently reliable data for the detection of conflicting entities from different modes of transport, especially because they cannot detect vulnerable users in obstructed areas.
The installation of GNSS devices in vehicles enables real-time monitoring, thus giving car drivers a reliable warning about the presence of other vehicles, but this technology also encounters difficulties in a multimodal environment. In the simulation of a railway environment [
29], one of the main investigated questions was the impact of long-delay satellite communication on the warning time for road users. The first simulation test was performed using terrestrial communication (with an average latency of 5 s), and the second using satellite communication (latency varies statistically between 15 and 40 s). The results show that the developed communication protocol successfully manages delay problems, and the difference in warning time and reliability is negligible. The positioning accuracy was reduced by adding a worst-case error component to the original measured positioning data. The results show that the system is resistant to the degradation of its positioning performance, and standard GNSS accuracy (<30 m) is sufficient for timely train detection.
Higher-level systems such as C-ITS and the IoV rely on several components for data processing, communication, decision-making, and information projection, including GNSS, LIDAR, camera, radar, and electronic control unit systems. Considering the complexity of the multimodal environment, all available data sources must be used for a reliable driver warning system. Looking at the global level, the existing fleet is still, to a lesser extent, equipped with advanced sensors for detecting obstacles, therefore the basis of the solution for detecting conflicting entities in traffic must be real-time position monitoring. Although the average accuracy of a GNSS is about 10–15 m, the mentioned sensor technologies can improve the accuracy of determining the position of the vehicle/user [
57].
3.3. Communication Technologies
For the collected and processed data to have a purpose, it is necessary to reliably and timely transfer them to the user. Today, numerous wireless communication technologies can be applied in a multimodal environment, but one of the key implementation challenges is propagation effects—especially channel statistics and their correlation with obstacles [
58]. In addition, as vehicles move quickly, the physical layers of the communication solution must support very high speeds.
C-ITS research is mostly based on two main solutions: DSRC and Cellular Vehicle to Everything (C-V2X). Both DSRC and C-V2X share the common objective of improving road safety and enhancing the efficiency of journeys for road users. They enable rapid communication between vehicles, roadside infrastructure, and pedestrians through direct communication, utilizing the same frequency band for short-range wireless communication.
DSRC represents the first and the main protocol for V2V and V2I communication, and the key technological driver for the development of ITS applications. It utilizes WLAN technology to create dedicated short-range communication channels, enabling vehicles to communicate directly with other entities within short to medium ranges, typically up to 300 m [
59]. The initial allocation of frequency bands contained 10 MHz channels between 5.855 and 5.925 GHz, but, because of the progress of C-V2X, a change in the operating band of DSRC to 5.895–5.905 GHz was adopted [
30]. At these operating frequencies, the Doppler spread is around 2700 Hz, resulting in rapid channel fluctuations and much more challenging channel estimation [
60].
On the other hand, C-V2X is defined by 3rd Generation Partnership Projects (3GPP), and it employs cellular radio instead of WLAN, using the same set of cellular radio technology as cell phones [
61]. A significant distinction from DSRC is that C-V2X allows both direct and indirect communication [
62]. In direct C-V2X, vehicles communicate directly with other vehicles (V2V) and roadside units (V2I), similar to DSRC. In indirect C-V2X, vehicles communicate with other entities indirectly via the cellular network (V2N), a capability that DSRC lacks.
In the comparison of the two mentioned technologies, according to [
60], in all aspects, C-V2X outperforms DSRC or performs equally. A crucial advantage of C-V2X from the point of vehicle safety is its greater communication range. However, the communication technology that is most often mentioned today in the context of C-ITS is DSRC. The lack of research on the use of C-V2X in the context of C-ITS could be attributed to several factors. C-V2X is a relatively new and evolving technology and there is a lack of standardized protocols or established compatibility between C-V2X and existing C-ITSs. Research efforts often prioritize areas that are more mature or have immediate practical applications, and DSRC, as the first standard for V2X communication, is already used in certain implementations. Also, supporters of DSRC believe that switching to C-V2X would delay the rollout of autonomous driving because DSRC is a more mature standard, proven to work in large commercial settings. Study [
63] is an example of using DSRC in a multimodal environment. The authors analyzed it in a railway–road environment. One of the notable characteristics of the DSRC system is its capability to detect possible collisions and issue a timely warning about them. While DSRC systems typically have a nominal range of one kilometer, this range is highly influenced by the surroundings and can be notably diminished in crowded or obstructed conditions. The DSRC waveform incorporates features that facilitate the establishment of communication systems characterized by high reliability and robustness. More than 10,000 measurements were conducted on two distinct test tracks. The results indicate that signals operating at the designated 5.8GHz frequency maintain operational integrity over considerable distances with minimal fading or spectral distortion, even in somewhat crowded surroundings. In a related study [
64], concentrating on direct DSRC between vehicles and trains, simulations and field tests of DSRCs were conducted. The authors determined that about 80% of the sent warnings arrived on time, about 10% arrived early, and the same amount arrived too late.
The broader term for the dynamic network infrastructure that connects vehicles, users, and other smart devices to the Internet is the IoV. A growing number of vehicles are integrated into IoV environments, wherein each vehicle serves as a node in the network [
65]. These vehicles engage in information exchange within an open wireless mode. Different communication activities occur between IoV users, in which they share crucial information like their identification, position, velocity, and other data that are essential for the operation of the network [
57]. Numerous authors have proposed a three-layered architecture designed to integrate various technologies into the IoV [
57]. Built-in vehicle sensors for collecting local information and detecting critical driving situations represent the first layer. The e-communications layer is the second level, which ensures that existing and emerging networks are seamlessly connected through communication standards. The third layer shapes the IoV’s intelligence, providing a substantial data processing capability. This layer consists of statistical hardware, a processing unit, and storage capacity. The IoV necessitates vehicles’ continuous connection to the Internet, operating within an ad hoc network environment, where public Internet connection is also available. Vehicles can also be equipped with local data storage for future utilization, allowing information sharing through the IoV network [
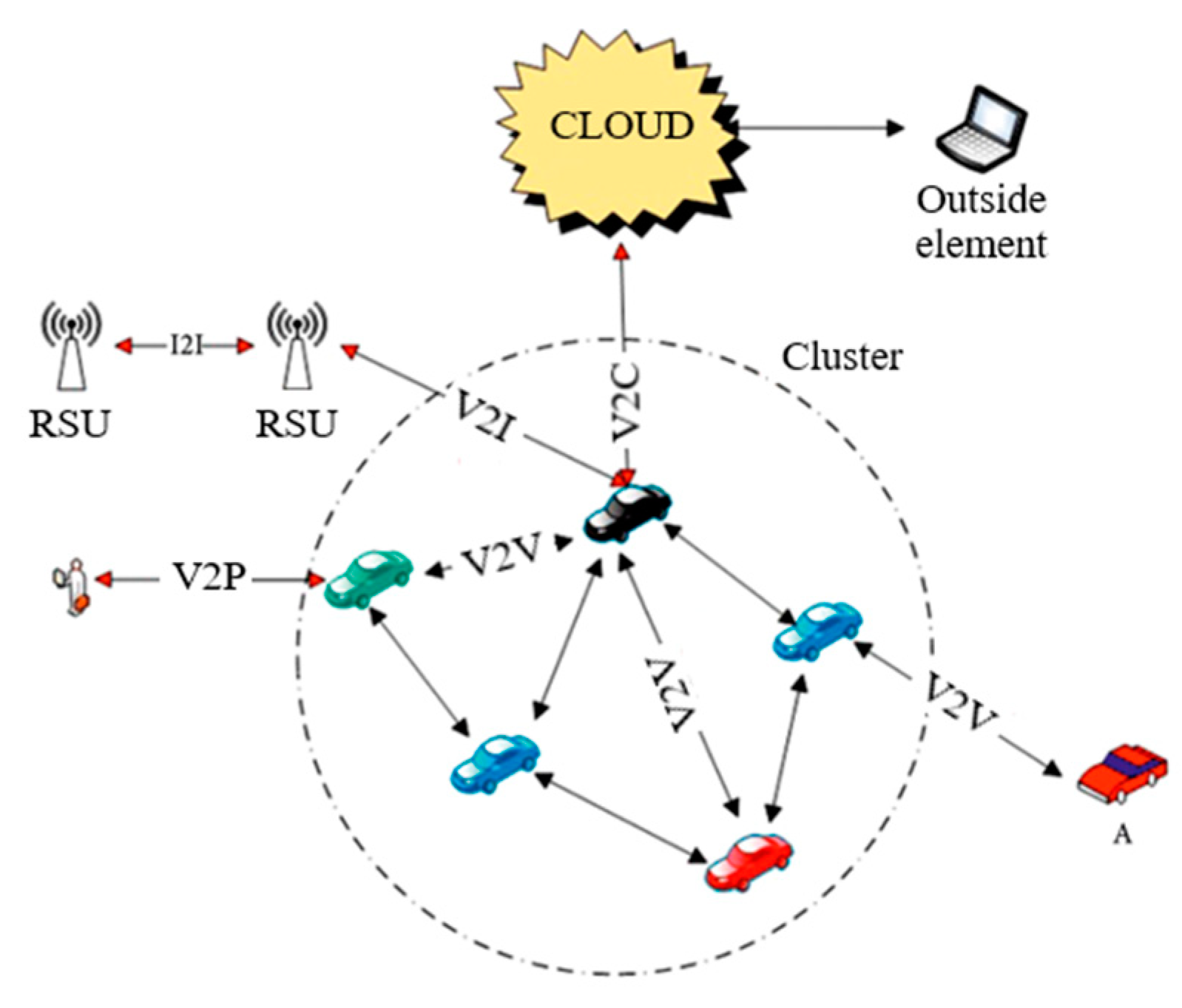
66]. The IoV combines several directions of communication (
Figure 7): V2V communication involves a wireless vehicle connection in which they exchange information about their position, velocity, and other useful data. On the other hand, communication between vehicles and pedestrians (V2P) enables the vehicle to track, check, and exchange information with pedestrians and other vulnerable users, which is instrumental to accident prevention through user awareness systems.
There is a constant exchange of information between RSUs through V2I communication that provides numerous services to the vehicle and the data center of the road service provider. Lastly, Vehicle-to-Cloud communication (V2C) enables the vehicles’ data collection and cloud storage, providing system access for obtaining even more information through the Application Programming Interface (API) [
57].
A review of the literature indicates the different characteristics and advantages of each described technology. DSRC stands out as an established technology that is already used in certain implementations. Its advantage lies in its ability to enable quick communication between the vehicle and the infrastructure. Despite its reliability, DSRC can experience challenges in densely populated areas and requires adequate infrastructure. C-V2X stands out for its ability to use the cellular network, providing wider coverage and improved connectivity. This technology has the potential for enabling communication between different vehicles and devices on the road. A mobile network that supports C-V2X also enables advanced features, such as communication with the cloud, which opens up possibilities for diverse applications. The IoV represents a broader concept that can integrate different technologies, including DSRC and C-V2X. This integration enables complete connectivity between vehicles, infrastructure, and other entities in the transport system. The strength of the IoV lies in its ability to use different technologies depending on its needs, which makes it the most acceptable choice for the real-time communication required for a reliable driver information system.
4. Challenges and Future Research Directions
ITSs bring advances to various fields, including in-vehicle warning systems. However, there are some hidden issues and key technologies that deserve further investigation. The C-ITS environment needs to address several future challenges before it becomes successful, such as:
Interoperability and standardization—considering the variety of the systems and equipment in the field of ITSs, the absence of standardization could cause incompatibility between different components, making it difficult for them to interact with each other. The development of common standards is crucial for optimal system integration.
Data security and privacy—with the increased exchange of data between vehicles and infrastructure, data security becomes crucial. Implementing strong cyber security measures and privacy policies is necessary to ensure user confidence in these systems.
Reliability and redundancy—reliability is essential to a warning system. An intense dependence on communication networks poses challenges, so the implementation of a redundancy system is necessary to ensure continuous functionality even in the case of a failure of certain parts of the network.
Human factors—the growing complexity of information provided by ITSs can lead to driver overload or misunderstandings in the interpretation of information. Additional care is needed when designing the interface to reduce the possibility of misinterpretation and ensure effective communication with drivers.
By solving these hidden problems and leveraging key technologies, in-vehicle warning systems can become more reliable, safer, and more efficient parts of ITSs.
In the available literature, in-vehicle warning systems are mostly related to autonomous driving. In terms of multimodal transport, several quality solutions have been developed for level crossings specifically, while solutions for other critical points of the multimodal network have been very poorly researched, so it is necessary to further investigate the possibilities of applying these technologies at a more advanced level. The primary focus of this paper was to study the available research in the field of C-ITS and the IoV that can be used to create a robust solution, designed to deliver timely and reliable warnings to all drivers, and potentially other users of the traffic system, as they approach critical points of the multimodal network environment. The focus was on synthesizing the available research findings to develop a solution that seamlessly integrates into the existing framework of sustainable transport.
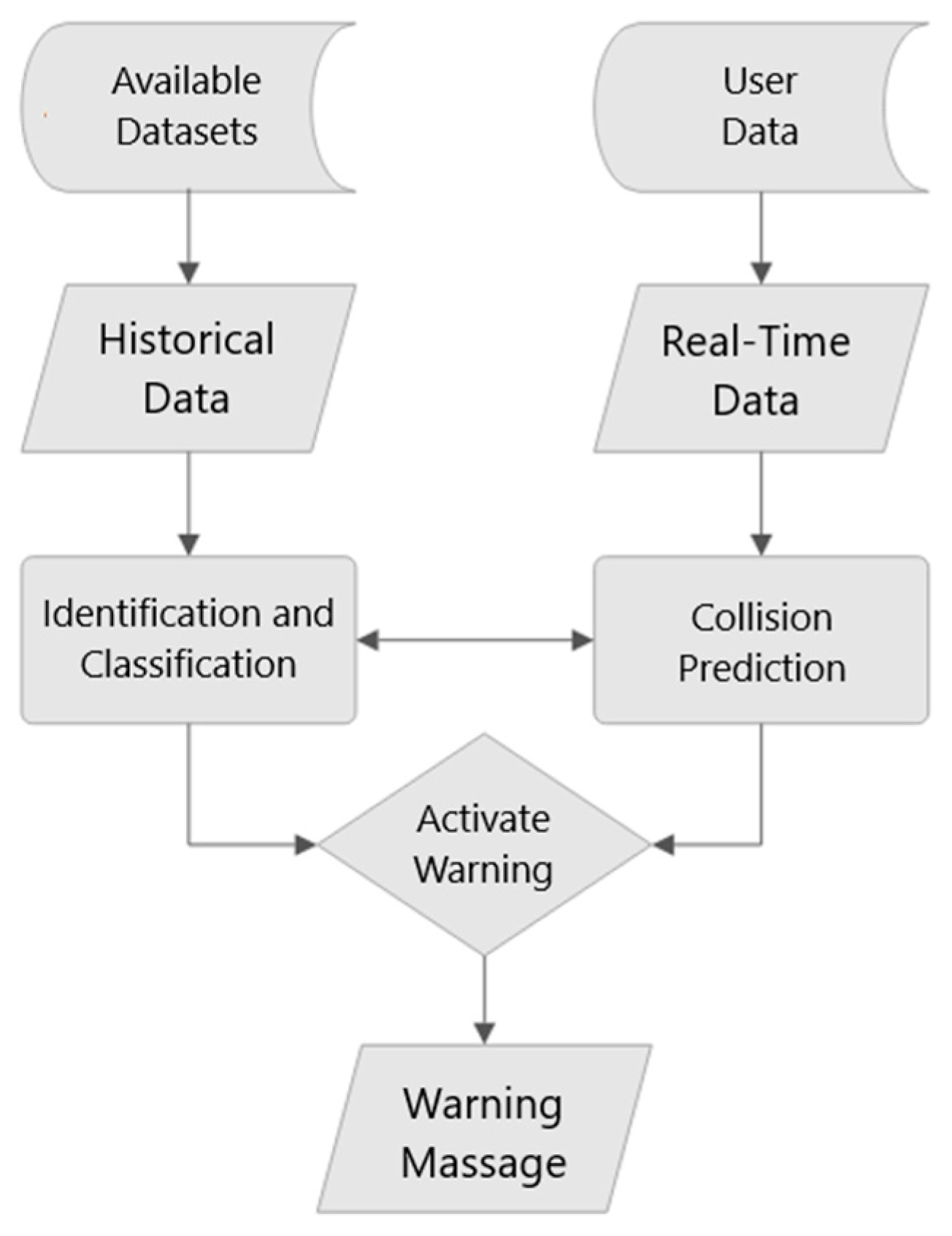
Based on the reviewed literature, a framework for a refined system architecture is proposed, on which future research will be based. This framework combines two existing models of in-vehicle warning systems: the ones based on historical data and the ones based on real-time data, as shown in
Figure 8. The guiding idea was that users of the system have the possibility of obtaining information about both potential and immediate danger when approaching critical points.
The first segment of the proposed architecture uses historical data and can be applied to all critical locations that data are accessible for. Historical data provide valuable information for conducting the identification and classification of locations with a history of traffic accidents. They are crucial for identifying patterns, assessing risks, and informing the system’s response strategies. Traffic is a highly intricate system consisting of numerous independent subsystems. Therefore, most of these subsystems employ specific information system architectures and data collection methods, so, for high-quality and usable data, it is necessary to connect the data sets available from multiple sources, e.g., the government, scientific community, industry, and the public [
23], therefore, there is a need to establish stable and open access to these data.
Simultaneously, the second segment deals with real-time location data and provides dynamic and timely information about the current state of the driver’s environment. The sources are system users from different modes of transport. Based on the precise data about their location, the system calculates the collision probability of conflicting traffic entities. This process can also consider the results of the critical point classification process, and vice versa, to make a more reliable decision. Based on the outputs of these two segments, the system will decide whether to warn the driver of potential or immediate danger.
Combining real-time data with historical data not only enhances the reliability of the system but also extends its applicability to locations lacking a history of incident situations. Integrating these system segments requires a comprehensive understanding of their functioning, mechanisms, and how they can complement each other to create a more robust and effective system.
For a truly sustainable intelligent driver information system, the integration of the following technologies within the ITS is required:
Edge Computing—processing data at the source (computing at the edge of the network) reduces latency in the transmission of information, which is essential for providing fast and accurate warnings to drivers.
Cloud computing—data storage and analysis in the cloud provides the necessary infrastructure to further improve warning system algorithms based on large amounts of data.
Machine learning and artificial intelligence—machine learning and artificial intelligence algorithms enable ITS to learn from experience, adapt to changing conditions, and improve the accuracy of their predictions and alerts.
Sensors and detection systems—advanced sensors such as LiDAR, radar, and cameras enable vehicles to accurately identify potential hazards in the environment, providing important information to the warning system.
V2V communication—vehicle-to-vehicle communication ensures the rapid exchange of information about the speed, position, and condition of vehicles in real-time, thus contributing to the prevention of collisions and improving overall traffic safety.
Cybersecurity measures—protecting communication networks and data from cyber threats is essential to maintaining the integrity of the in-vehicle warning system.
Blockchain technology—the integration of blockchain technology can improve the security and transparency of data exchange between vehicles and infrastructure within ITSs.
Human–Machine Interface (HMI)—a quality human–machine interface helps drivers understand and respond appropriately to alerts, increasing the overall efficiency of the system.
Furthermore, within these key technologies, it is necessary to investigate which applications are most suitable for the proposed information system. One type of sensor can hardly meet the needs for obstacle detection in a multimodal environment due to the sensor’s limitations in range, signal characteristics, and detection operating conditions, and it is necessary to investigate in detail the methodology of combining multiple sensors and their system integration. The combination of real-time monitoring and sensor technologies is proving to be a sustainable solution.
Regarding the transfer of information, the emphasis of future research should be on direct communication between transport entities, excluding the RSU if possible. A reliable warning system requires a stable network connection with low latency and global coverage. Today, numerous wireless communication technologies can be deployed in a multimodal environment, but any mobile vehicle or device may face network disconnection, wireless bottlenecks, and security threats in different geographic locations. Over the years, the speed and efficiency of wireless networks have improved, but there are still some areas in which current wireless networks struggle to perform efficiently. New generations of mobile networks are expected to be able to meet the performance criteria for low latency, high speed, and improved system reliability. The IoV combines different technologies depending on its needs, which makes it the most acceptable choice for the real-time communication required for a reliable driver information system.
In conclusion, the good design of a driver warning system is crucial to achieving its purpose, which is to provide relevant information that contributes to safer and more efficient driving. This is why it is important to carefully choose the most appropriate technologies on which the system will be based.
5. Conclusions
Traffic safety is a critical issue that concerns all sectors involved worldwide. At present, in the transport system, there are numerous high-quality solutions used to increase safety, but in the field of multimodal transport networks such solutions are very limited. Critical points in a multimodal environment represent challenging situations in which different modes of transport are in “physical conflict”. Due to specific differences in the infrastructure, vehicles, and users’ behavior, places where different modes of traffic intersect are recognized as critical points of the traffic system, making them crucial aspects of the implementation of Sustainable Urban Mobility Plans (SUMPs). The unpredictable nature of these interactions is a result of road users’ behavior. Various passenger and driver information systems are already widely used within ITSs, and recent research indicates that warning systems implemented within vehicles or smartphones can have a substantial influence on users’ behavior, provided they are perceived as conceivable and trustworthy.
The existing literature predominantly associates in-vehicle warning systems with autonomous driving, necessitating further exploration of the potential applications of these technologies at an elevated level. Several examples of driver information systems were described in this paper, with an emphasis on level crossings as the most critical points in the multimodal environment. All the mentioned examples showed a certain impact on the driver through simulations and/or field tests, while providing guidelines for designing a more advanced system. The conclusion was that the system must fulfill three key requirements: the identification of critical points, the detection of conflicting entities, and real-time and reliable communication.
Identifying and classifying critical points requires linking security aspects with spatial components, for which reliable and consistent spatial data play a key role. The first step is to identify potentially dangerous places, considering different modes of transport at the same level. Detailed technical and historical accident data are essential for risk assessment. Classical methods do not consider spatial components, while more advanced methods include analyses where geospatial elements are combined with accident data to identify critical points. The choice of method depends on the specific parameters of the system and the degree of risk at the crossing points for different forms of traffic.
Regarding the detection of conflicting entities, commercial sensors, such as LIDAR, cameras, and radars are not reliable due to their limitations in range and reflections. The installation of GNSS devices enables the monitoring and warning of drivers in real time, and research shows that the standard performance of the GNSS meets the needs of the system, reducing its complexity and costs. Alongside the GNSS, the mentioned sensor technologies can improve the accuracy of detection.
Wireless communication technologies play a key role in the multimodal environment but face numerous challenges due to the effects of propagation and vehicle speed. The main technologies used for communication are DSRC and C-V2X. C-V2X shows advantages in terms of its communication range and security applications, but DSRC is more often mentioned in the context of C-ITSs. The IoV enables complete connectivity between vehicles, infrastructure, and other entities in the transport system, and is presented as the most acceptable choice for real-time communication. Since the integration of communication systems between multiple transportation modes is still in its infancy, there is limited evidence within current research to completely recognize the potential benefits and drawbacks for user safety that this technology might present.
The proposed framework for advanced driver information systems combines two existing models of in-vehicle warning systems found in the literature: the ones based on historical data and the ones based on real-time data. Most of the research so far focuses on systems that require additional devices for detection and data processing, while the proposed system relies on methods for direct communication between users and cloud-based processing. The implementation of the system proposed in this paper would be technologically and financially less demanding than classic solutions and could alleviate the stagnation of the effectiveness of existing security measures.
The effectiveness of driver warning systems depends on their design, implementation, and driver education on their proper use. Each driver warning system has its advantages and disadvantages, and its effectiveness depends on various factors. The advantages of driver warning systems are manifested in increasing the driver’s awareness of the environment, providing them with information about potential and immediate dangers; shortening the reaction time, which reduces the risk of accidents; and generally increasing the safety of road traffic by preventing or reducing the severity of accidents. On the other hand, when designing, the potential disadvantages of such a system must also be taken into account, such as possible driver distraction (if the warning system is not properly designed it can cause driver distraction and reduce attention on the road), technology dependence (drivers can rely on systems warnings so much that they ignore their personal responsibility for driving), and possible technical failures (warning systems are subject to technical difficulties, such as sensor or electronic component failures, which can cause a lack of reliability). Therefore, it is important to point out that the gradual implementation of new technologies to increase traffic safety should not be considered a substitute for traditional approaches, but part of an active protection that informs drivers of the potential dangers in their environment.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







