
Mitigating Low-Frequency Oscillations and Enhancing the Dynamic Stability of Power System Using Optimal Coordination of Power System Stabilizer and Unified Power Flow Controller

 , ,
, ,  ,
,  ,
,  and
and
Abstract
:1. Introduction
1.1. Related Work
1.2. Research Gaps
1.3. Contribution of the Manuscript
- The optimal coordination of a power system stabilizer, power oscillation damper and unified power flow controller is proposed using ant lion optimization for low-frequency oscillation mitigation;
- The controllers are optimally sized and placed using ALO;
- The tuning parameters of the controller are optimally computed;
- A detailed comparative analysis to show the dominance of the ALO-coordinated UPFC-PSS system over the existing literature is presented. Comparative analysis is presented on the performance characteristics, such as the damping ratio and eigenvalue analysis.
1.4. Aims of the Manuscript
- To collect and analyze the necessary data from different sources;
- To obtain the synchronous machine rotor angle value, rotor speed deviation and DC-link voltage;
- To ensure the size of the power oscillation damping controller is a properly sized damping controller;
- To perform eigenvalue and time domain analyses.
1.5. Scope of the Study
1.6. Methodology
2. Modeling of Proposed System
2.1. Modeling of Synchronous Generator
2.2. Modeling of Excitation System
2.3. Power System Stabilizer
2.3.1. Optimal Parameter of PSS
2.3.2. PSS Model
2.4. Modeling of UPFC
2.4.1. Mathematical Model of SMIB with UPFC
2.4.2. Non Linear Dynamic form of UPFC
2.4.3. Linear Model of UPFC
2.4.4. Dynamic Form of DC-Link Capacitor
2.4.5. PSS and UPFC Controllers
3. Methodology
3.1. Ant Lion Optimization Technique
3.2. Objective Function
Constraint Equation
3.3. Optimal Sizing of Power System Stabilizer
3.4. Design of UPFC Supplementary Controllers
4. Simulation Results and Discussion
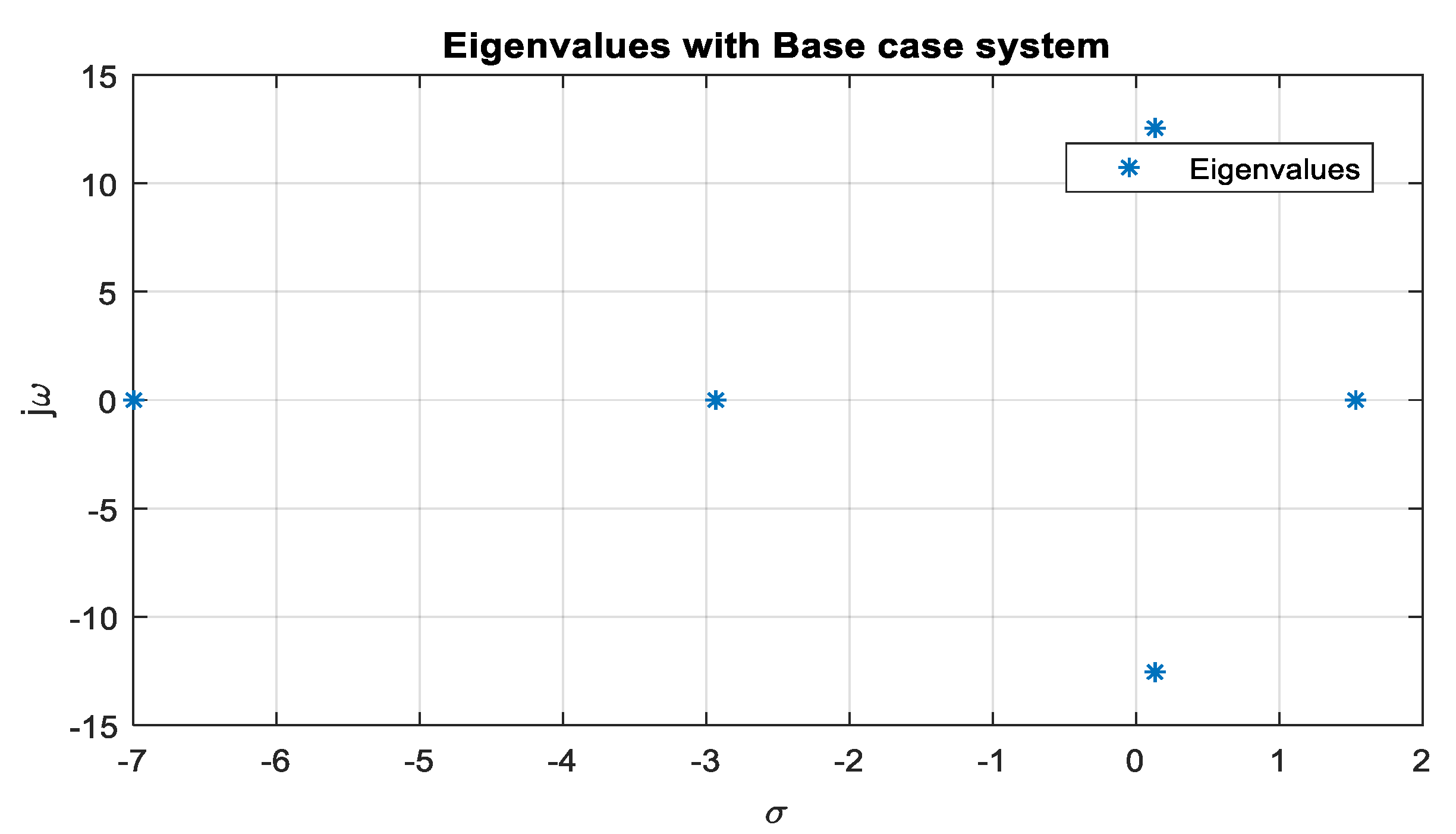
4.1. Eigenvalue Analysis and Minimum Damping Ratio (MDR)
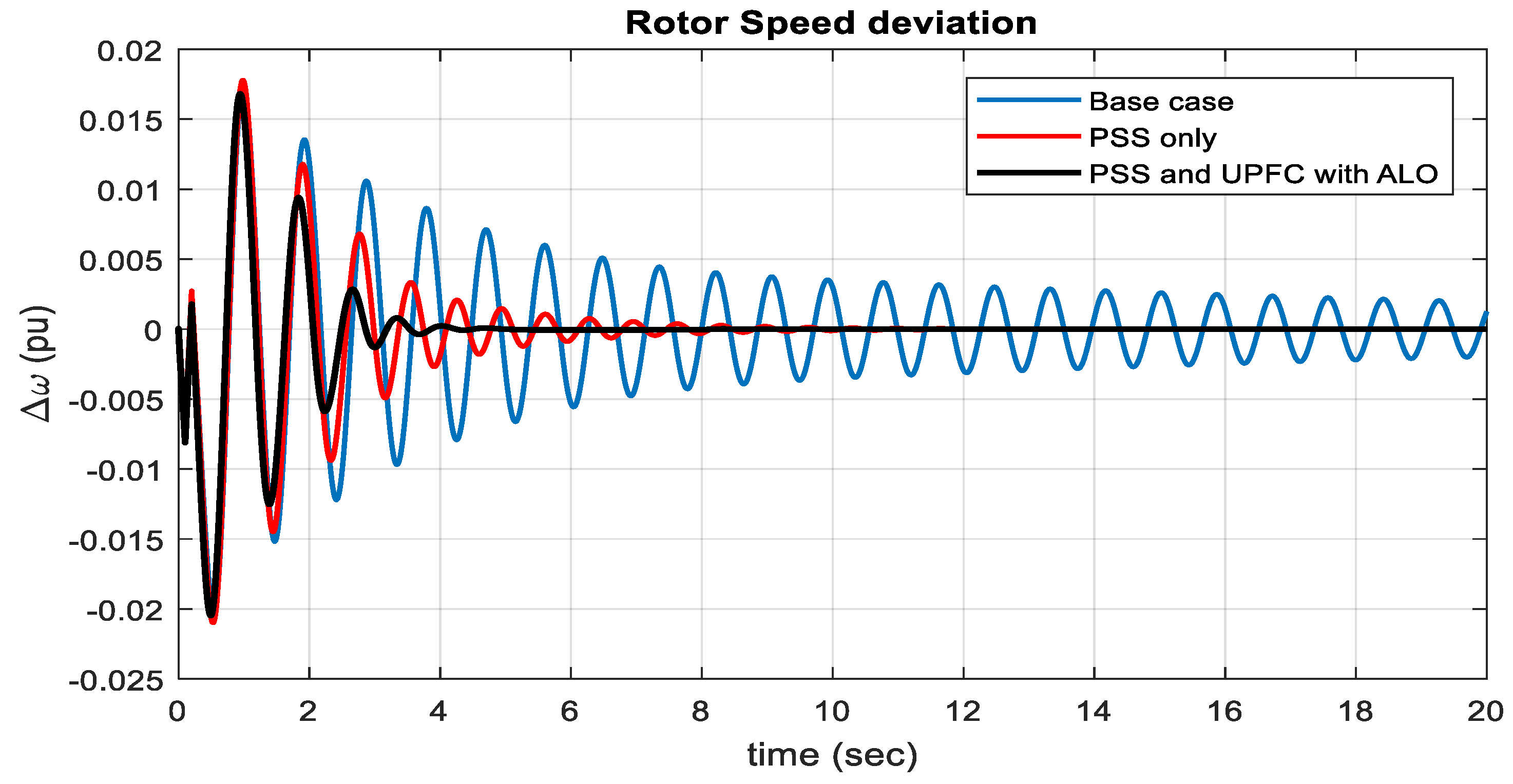
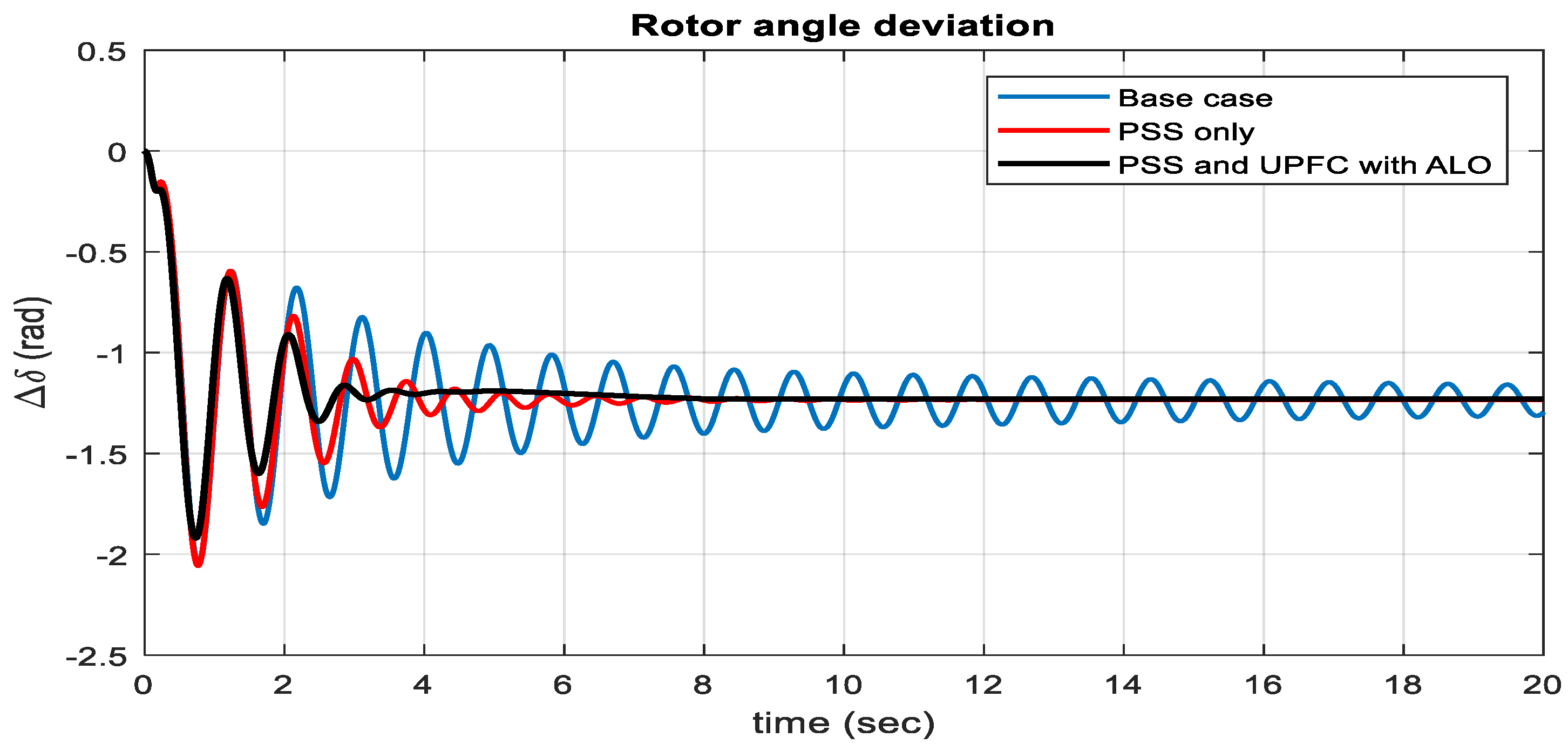
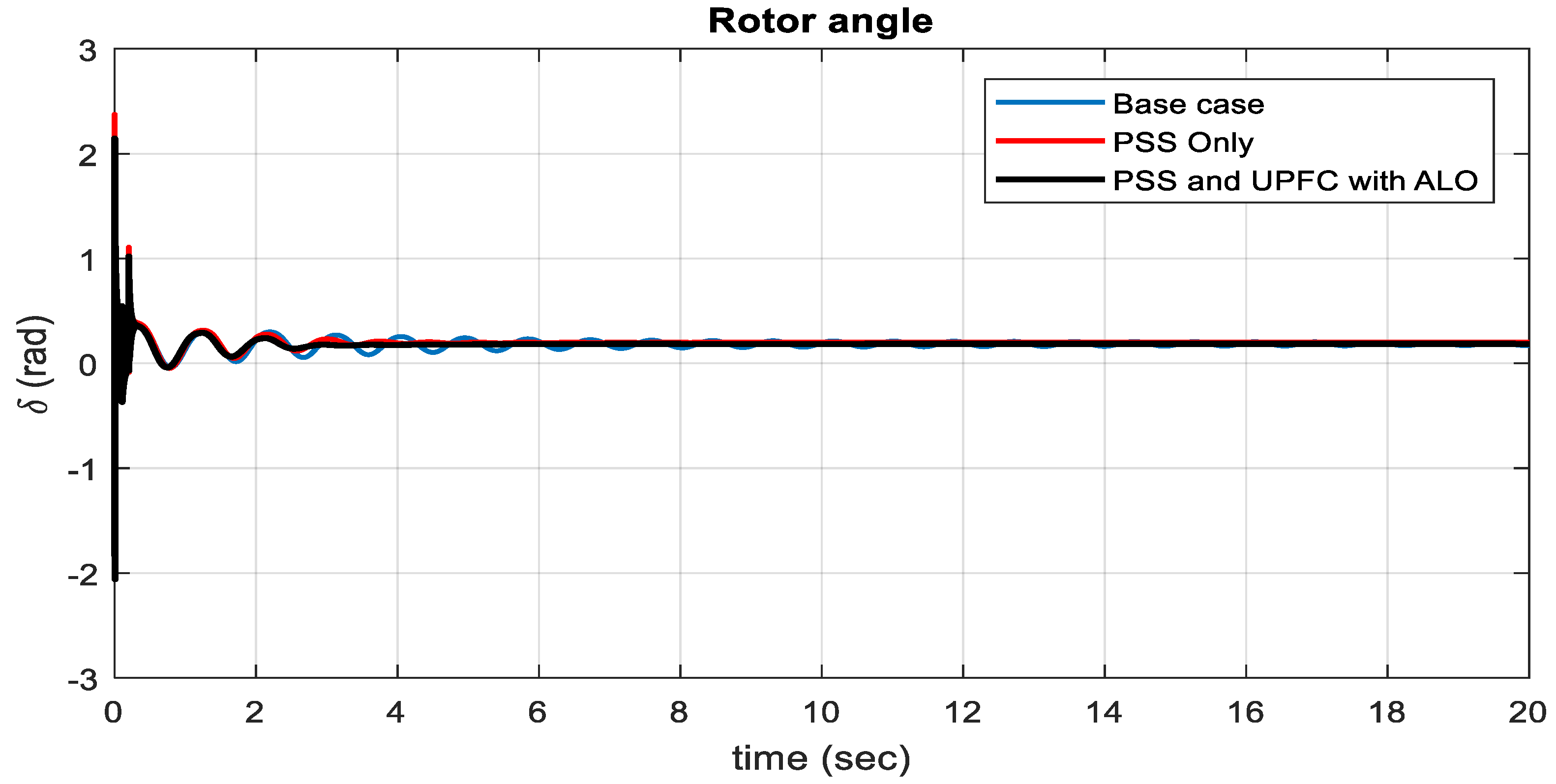
4.2. Time Domain Analysis
4.2.1. PSS and UPFC Parameters
4.2.2. Simulation Results of UPFC
4.2.3. Simulation Results Using Different Techniques
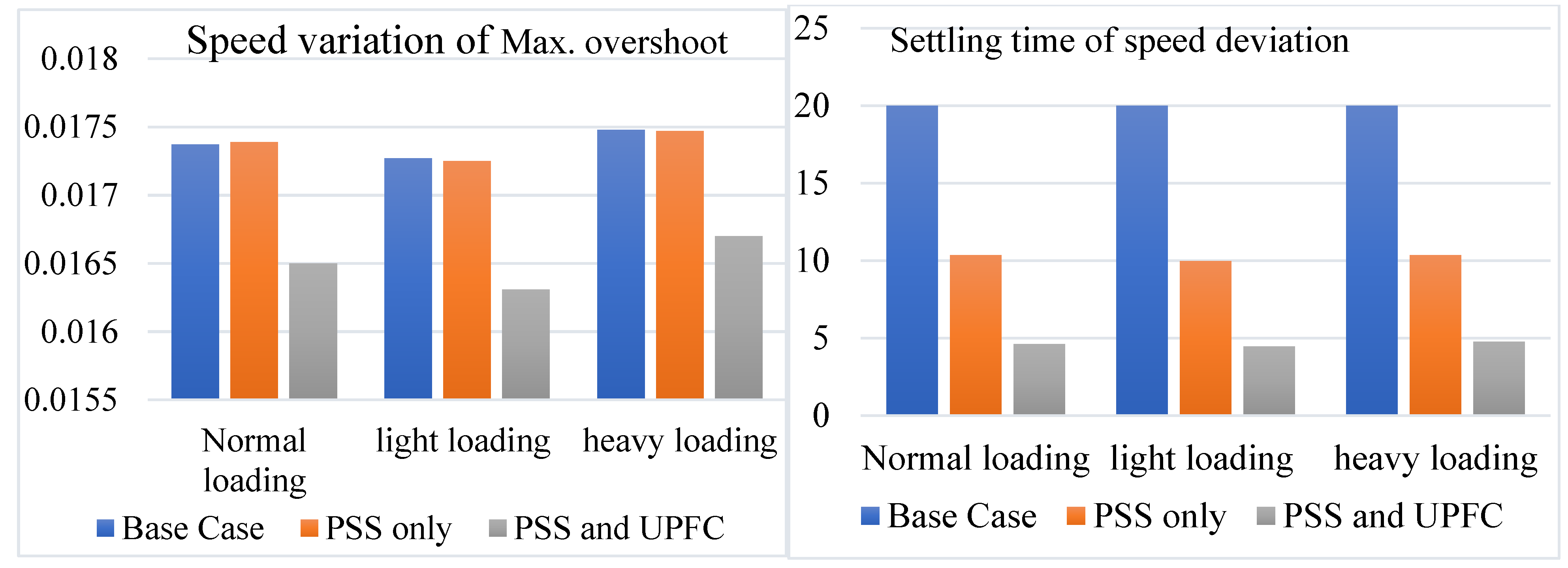
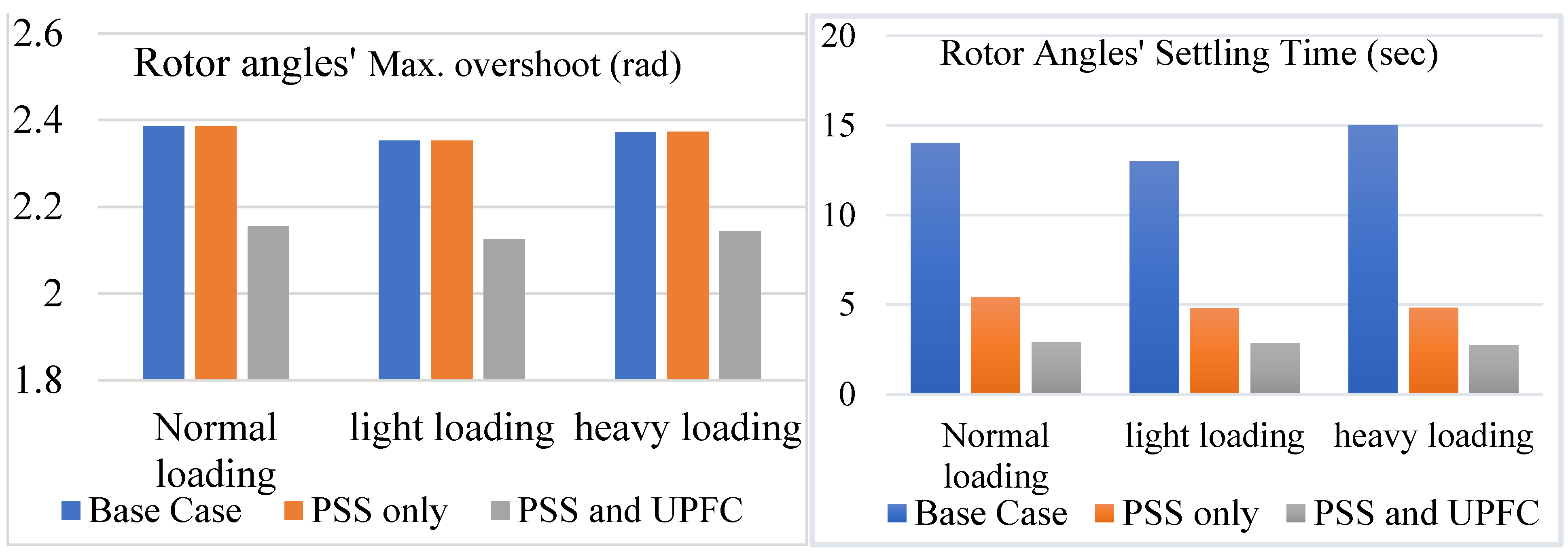
4.3. Simulation Results in Different Loading Conditions
4.3.1. Simulation Results in Normal Operating Conditions
4.3.2. Simulation Results in Heavy Operating Conditions
4.3.3. Simulation Results in Light Operating Conditions
4.4. General Description of Results
4.5. Simulation Results Comparison
5. Conclusions
6. Recommendation
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kundur, P. Power System Stability and Control, 1st ed.; McGraw Hill: New York, NY, USA, 1994. [Google Scholar]
- Bayu, E.S.; Khan, B.; Ali, Z.M.; Alaas, Z.M.; Mahela, O.P. Mitigation of Low-Frequency Oscillation in Power Systems through Optimal Design of Power System Stabilizer Employing ALO. Energies 2022, 15, 3809. [Google Scholar] [CrossRef]
- Shahgholian, G.; Movahedi, A.; Faiz, J. Coordinated design of TCSC and PSS controllers using VURPSO and Genetic algorithms for multi-machine power system stability. Int. J. Control. Autom. Syst. 2014, 13, 398–409. [Google Scholar] [CrossRef]
- Yadav, M.; Soni, A. Improvement of power flow and voltage stability using unified power flow controller. In Proceedings of the 2016 International Conference on Electrical, Electronics, and Optimization Techniques (ICEEOT), Chennai, India, 3–5 March 2016; pp. 4056–4060. [Google Scholar] [CrossRef]
- Parhizgar, N.; Roopaei, M.; Esfandiar, P.; Dehghani, Z. Analysis of unified power flow controller (UPFC) parameters on power flow in power system. Aust. J. Basic Appl. Sci. 2011, 5, 703–710. [Google Scholar]
- Patil, S.; Mahajan, P.K. A Review on Implementation of UPFC for improvement of active power flow capability in power system using IEEE 14 bus system. Int. Res. J. Eng. Technol. 2017, 4, 542–547. [Google Scholar]
- Khodabakhshian, A.; Hooshmand, R.; Sharifian, R. Power system stability enhancement by designing PSS and SVC parameters coordinately using RCGA. In Proceedings of the 2009 Canadian Conference on Electrical and Computer Engineering, St. John’s, NL, Canada, 3–6 May 2009; pp. 579–582. [Google Scholar] [CrossRef]
- Thu, W.M.; Lin, K.M. Mitigation of Low Frequency Oscillations by Optimal Allocation of Power System Stabilizers: Case Study on MEPE Test System. Energy Power Eng. 2018, 10, 333–350. [Google Scholar] [CrossRef]
- Singla, C.R.; Rana, P. A critical study on the role of unified power flow control in voltage power transfer. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 3132–3135. [Google Scholar]
- Hussain, A.N.; Malek, F.; Rashid, M.A.; Malek, M.F.H.A. Performance improvement of power system stability by using multiple damping controllers based on PSS and the UPFC. Int. J. Eng. Technol. 2013, 5, 3257–3269. [Google Scholar]
- Alam, M.S.; Shafiullah, M.; Hossain, M.I.; Hasan, M.N. Enhancement of power system damping employing TCSC with genetic algorithm based controller design. In Proceedings of the 2015 International Conference on Electrical Engineering and Information Communication Technology (ICEEICT), Savar, Dhaka, Bangladesh, 21–23 May 2015; pp. 21–23. [Google Scholar]
- Wang, H. Damping function of unified power flow controller. IEE Proc. Gener. Transm. Distrib. 1999, 146, 81–87. [Google Scholar] [CrossRef]
- Hassan, L.H.; Moghavvemi, M.; Mohamed, H.A.F. Impact of UPFC-based damping controller on dynamic stability of Iraqi power network. Sci. Res. Essays 2011, 6, 136–145. [Google Scholar]
- Abdel-Magid, Y.L.; Abido, M.A. Optimal Multi objective Design of Robust Power System Stabilizers Using Genetic Algorithms. IEEE Trans. Power Syst. 2003, 18, 1125–1132. [Google Scholar] [CrossRef]
- Prasad, K.H.; Tirumalaiah, S. Dynamic Performance of the Interline Unified Power Flow Controller (IUPFC) System Using 48-Pulse GTO Thyristor. Citeseer 2014, 1, 13–22. [Google Scholar]
- Banaei, M.R.; Hashemi, A. An adaptive UPFC based stabilizer for damping of low frequency oscillation. J. Electr. Eng. Technol. 2010, 5, 197–208. [Google Scholar] [CrossRef]
- Shahriar, M.S.; Shafiullah, M.; Rana, M.J. Stability enhancement of PSS-UPFC installed power system by support vector regression. Electr. Eng. 2017, 100, 1601–1612. [Google Scholar] [CrossRef]
- Shayeghi, H.; Shayanfar, H.A.; Jalilzadeh, S.; Safari, A. Design of output feedback UPFC controller for damping of elec-tromechanical oscillations using PSO. Energy Convers. Manag. 2009, 50, 2554–2561. [Google Scholar] [CrossRef]
- Utami, R.S.; Abu-Siada, A.; Suwarno; Hariyanto, N.; Djalal, M.R.; Hartono, J. Optimal Tuning of Unified Power Flow Controller Using Firefly Algorithm to Improve Damping of Inter-Area Oscillations in Multi-Machine System. In Proceedings of the 2020 2nd International Conference on Smart Power & Internet Energy Systems (SPIES), Bangkok, Thailand, 15–18 September 2020; pp. 436–441. [Google Scholar] [CrossRef]
- Haghshenas, M.; Hajibabaee, M.; Ebadian, M. Controller Design of STATCOM Using Modified Shuffled Frog Leaping Algorithm for Damping of Power System Low Frequency Oscillation. Int. J. Mechatron. Electr. Comput. Technol. 2016, 6, 2786–2799. [Google Scholar]
- Jalali, A.; Aldeen, M. Placement and operation of STATCOM-storage for voltage stability enhancement of power systems with embedded wind farms. In Proceedings of the 2016 IEEE Innovative Smart Grid Technologies-Asia (ISGT-Asia), Melbourne, VIC, Australia, 28 November–1 December 2016; pp. 948–953. [Google Scholar] [CrossRef]
- Vigneysh, T.; Kumarappan, N. Stability analysis and dynamic performance enhancement of autonomous microgrid using adaptive fuzzy PI controller. In Proceedings of the 2017 IEEE Congress on Evolutionary Computation (CEC), Donostia, Spain, 5–8 June 2017; pp. 1199–1206. [Google Scholar] [CrossRef]
- Vantsevitch, V. Enhancement of Dynamical Characteristics of a Fuzzy Control. In Proceedings of the 2018 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Rio de Janeiro, Brazil, 8–13 July 2018; pp. 1–8. [Google Scholar]









































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | T1 | T2 | T3 | T4 | K |
|---|---|---|---|---|---|
| Lower bound | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 |
| Upper bound | 1 | 1 | 1 | 1 | 20 |
| Parameters | K | Tw | T1 | T2 | T3 | T4 |
|---|---|---|---|---|---|---|
| Values | 14.265 | 10 | 0.01968 | 0.3608 | 0.1544 | 0.4632 |
| Operating Condition | Normal Loading | Light Loading | Heavy Loading |
|---|---|---|---|
| Eigenvalues for base case system | +0.1527 + 9.1627i | −7.0589 + 0.0000i | +0.1320 + 12.5527i |
| +0.1527 − 9.1627i | +1.5345 + 0.0000i | +0.1320 − 12.5527i | |
| +1.4242 + 0.0000i | +0.1156 + 5.1410i | +1.5318 + 0.0000i | |
| −6.9972 + 0.0000i | +0.1156 − 5.1410i | −6.9952 + 0.0000i | |
| −2.8657 + 0.0000i | −2.8400 + 0.0000i | −2.9339 + 0.0000i | |
| Eigenvalues for PSS and UPFC Controller | −0.2655 + 7.2754i | −0.2616 + 4.1837i | −0.2701 + 10.1023i |
| −0.2655 − 7.2754i | −0.2616 − 4.1837i | −0.2701 − 10.1023i | |
| −2.5097 + 2.447i | −2.5210 + 2.4518i | −2.5038 + 2.4946i | |
| −2.5097 − 2.447i | −2.5210 − 2.45181i | −2.5038 − 2.4946i | |
| −0.0154 + 0.000i | −0.0007 + 0.0000i | −0.0182 + 0.0000i |
| Parameters Algorithm | K | Tw | T1 | T2 | T3 | T4 | Sizing Time (s) |
|---|---|---|---|---|---|---|---|
| ALO | 6.5396 | 10 | 0.11789 | 0 0.60062 | 0.31586 | 0.66675 | 15.531407 |
| GA | 8.0538 | 10 | 0.020261 | 0. 91612 | 0. 99006 | 0. 1817 | 19.4363 |
| PSO | 13.0739 | 10 | 0.506848 | 0.0413708 | 0.78713 | 0.8195 | 106.3817 |
| TLBO | 9.0307 | 10 | 0.95754 | 0.39032 | 0.27762 | 0.22551 | 203.4058 |
| Maximum Overshoot | Settling Time (s) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Conventional | GA | PSO | TLBO | ALO | Conventional | GA | PSO | TLBO | ALO | |
| 0.0183 | 0.0182 | 0.0181 | 0.0180 | 0.0166 | 20 | 6.98 | 11.87 | 14.45 | 4.6 | |
| −2.166 | −1.933 | −1.934 | −1.931 | −1.862 | 20 | 6.26 | 9.74 | 12.22 | 3.92 | |
| 2.1506 | 2.1893 | 2.1935 | 2.1958 | 2.1936 | 20 | 3.2 | 4.85 | 7.76 | 2.74 | |
| Power System States | Overshoot | Settling Time (s) | ||||
|---|---|---|---|---|---|---|
| Base Case | PSS Only | PSS and UPFC | Base Case | PSS Only | PSS-UPFC | |
| 0.0172 | 0.0171 | 0.0161 | 20 | 10.2 | 4.17 | |
| −2.016 | −2.017 | −1.88 | 20 | 10.25 | 4.01 | |
| 2.26 | 2.25 | 2.05 | 12 | 5.17 | 2.77 | |
| System States | Maximum Overshoot | Settling Time (s) | ||||
|---|---|---|---|---|---|---|
| Base Case | PSS Only | PSS-UPFC | Base Case | PSS Only | PSS-UPFC | |
| 0.0173 | 0.0172 | 0.0162 | 20 | 10.24 | 4.67 | |
| −2.03 | −2.02 | −1.82 | 20 | 10.31 | 4.13 | |
| 2.36 | 2.35 | 2.11 | 11.2 | 4.29 | 2.5 | |
| System States | Maximum Overshoot | Settling Time (s) | ||||
|---|---|---|---|---|---|---|
| Base Case | PSS Only | PSS-UPFC | Base Case | PSS Only | PSS-UPFC | |
| 0.0172 | 0.0171 | 0.0160 | 20 | 9.87 | 4.24 | |
| −2.015 | −2.012 | −1.761 | 20 | 8.03 | 4.01 | |
| 2.25 | 2.24 | 2.12 | 10 | 4.6 | 2.72 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Solomon, E.; Khan, B.; Boulkaibet, I.; Neji, B.; Khezami, N.; Ali, A.; Mahela, O.P.; Pascual Barrera, A.E. Mitigating Low-Frequency Oscillations and Enhancing the Dynamic Stability of Power System Using Optimal Coordination of Power System Stabilizer and Unified Power Flow Controller. Sustainability 2023, 15, 6980. https://doi.org/10.3390/su15086980
Solomon E, Khan B, Boulkaibet I, Neji B, Khezami N, Ali A, Mahela OP, Pascual Barrera AE. Mitigating Low-Frequency Oscillations and Enhancing the Dynamic Stability of Power System Using Optimal Coordination of Power System Stabilizer and Unified Power Flow Controller. Sustainability. 2023; 15(8):6980. https://doi.org/10.3390/su15086980
Chicago/Turabian StyleSolomon, Endeshaw, Baseem Khan, Ilyes Boulkaibet, Bilel Neji, Nadhira Khezami, Ahmed Ali, Om Prakash Mahela, and Alina Eugenia Pascual Barrera. 2023. "Mitigating Low-Frequency Oscillations and Enhancing the Dynamic Stability of Power System Using Optimal Coordination of Power System Stabilizer and Unified Power Flow Controller" Sustainability 15, no. 8: 6980. https://doi.org/10.3390/su15086980