
Wind Power Interval Prediction via an Integrated Variational Empirical Decomposition Deep Learning Model
Abstract
:1. Introduction
2. Methods
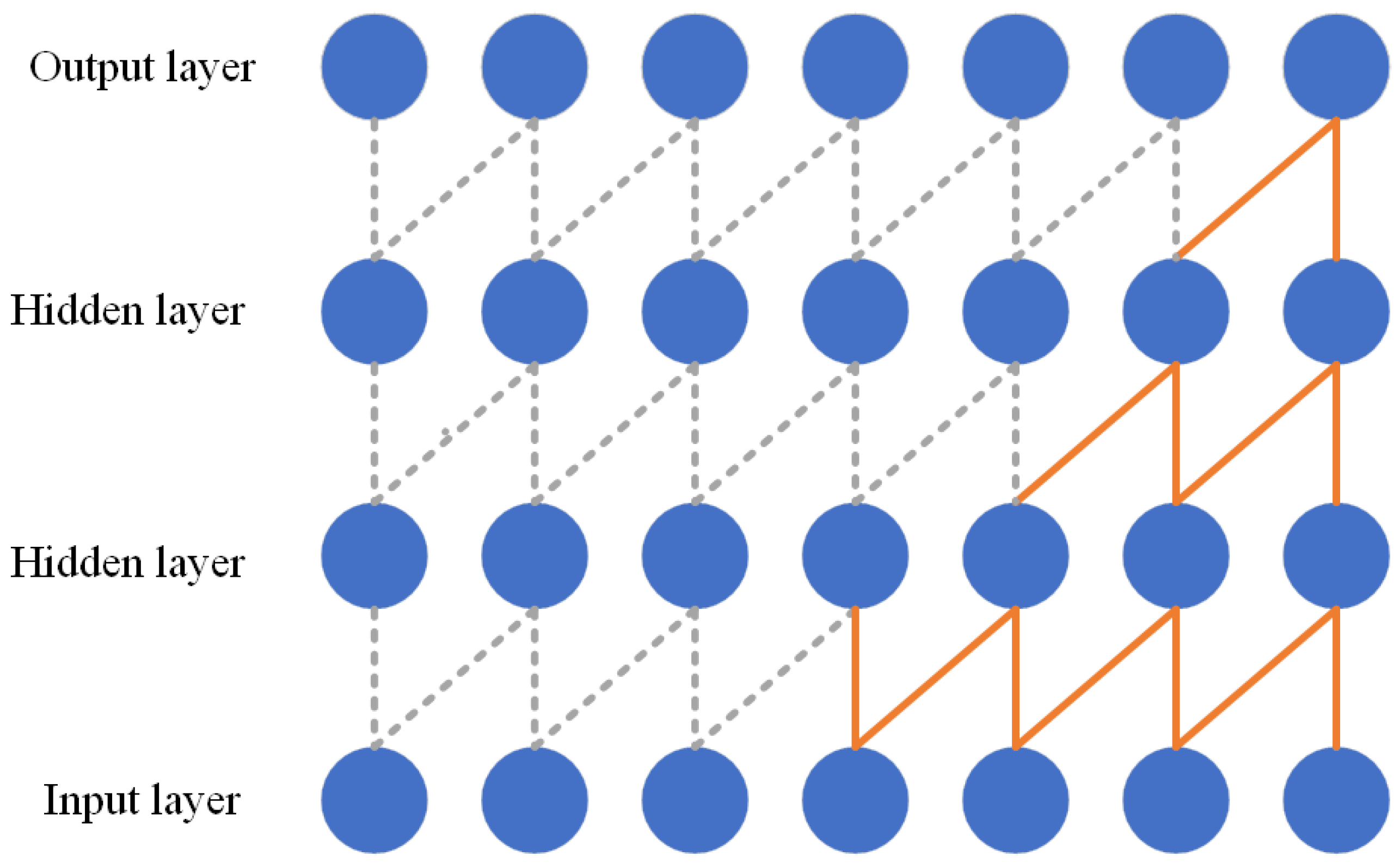
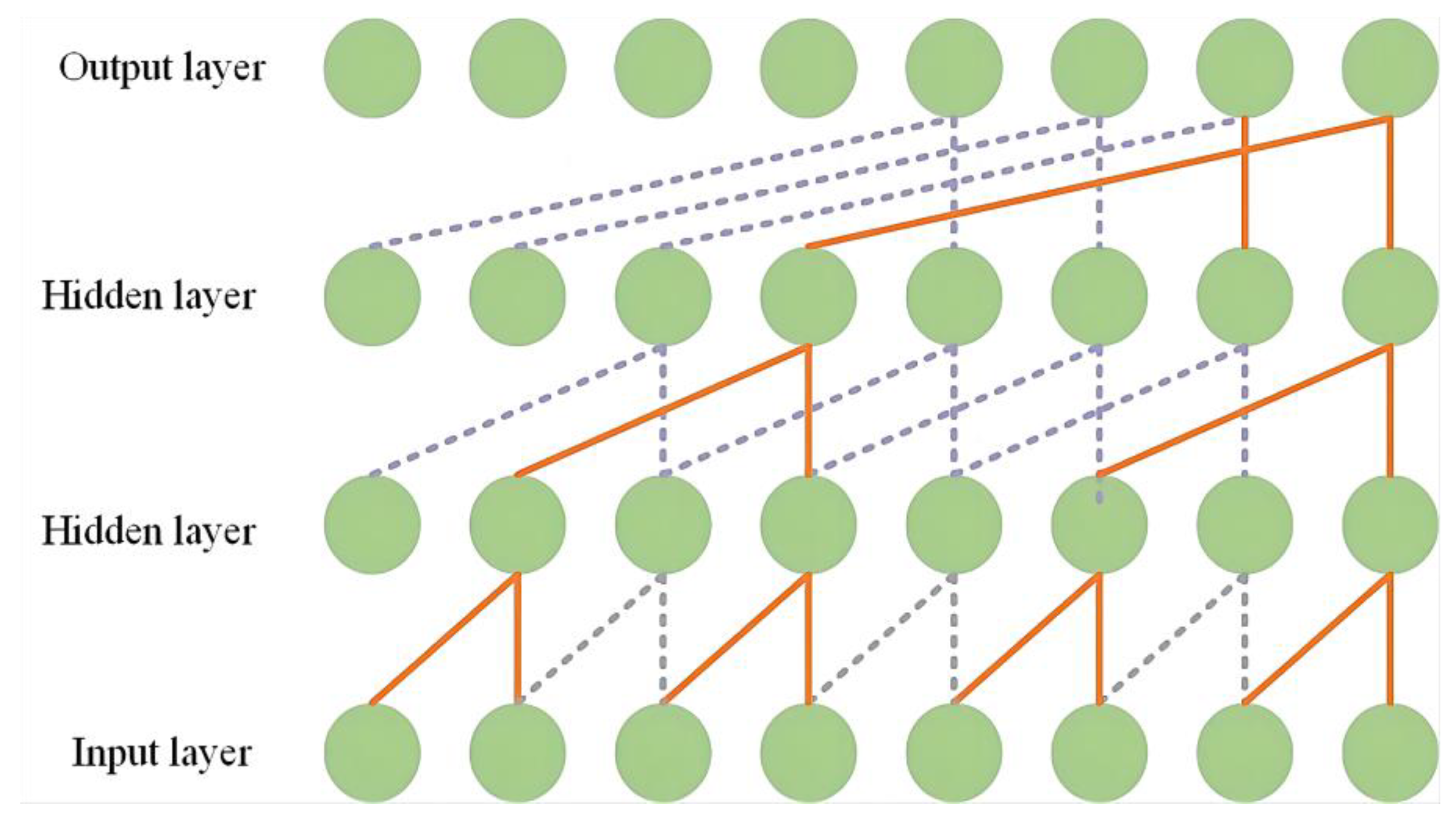
2.1. Temporal Convolutional Network Model
2.1.1. Convolutional Network Model
2.1.2. Residual Connection Structure
2.1.3. Attention Mechanism
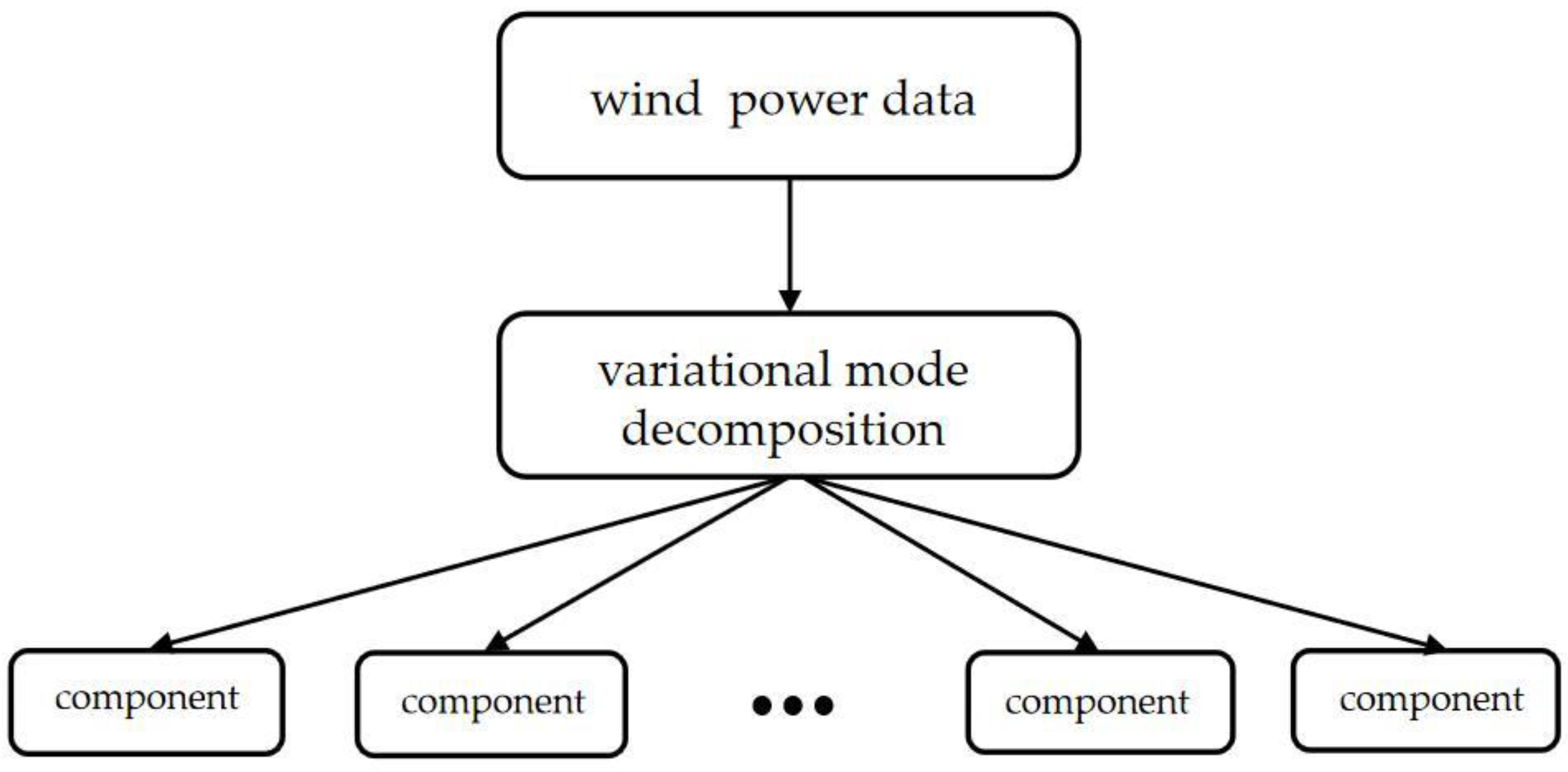
2.2. Variational Mode Decomposition
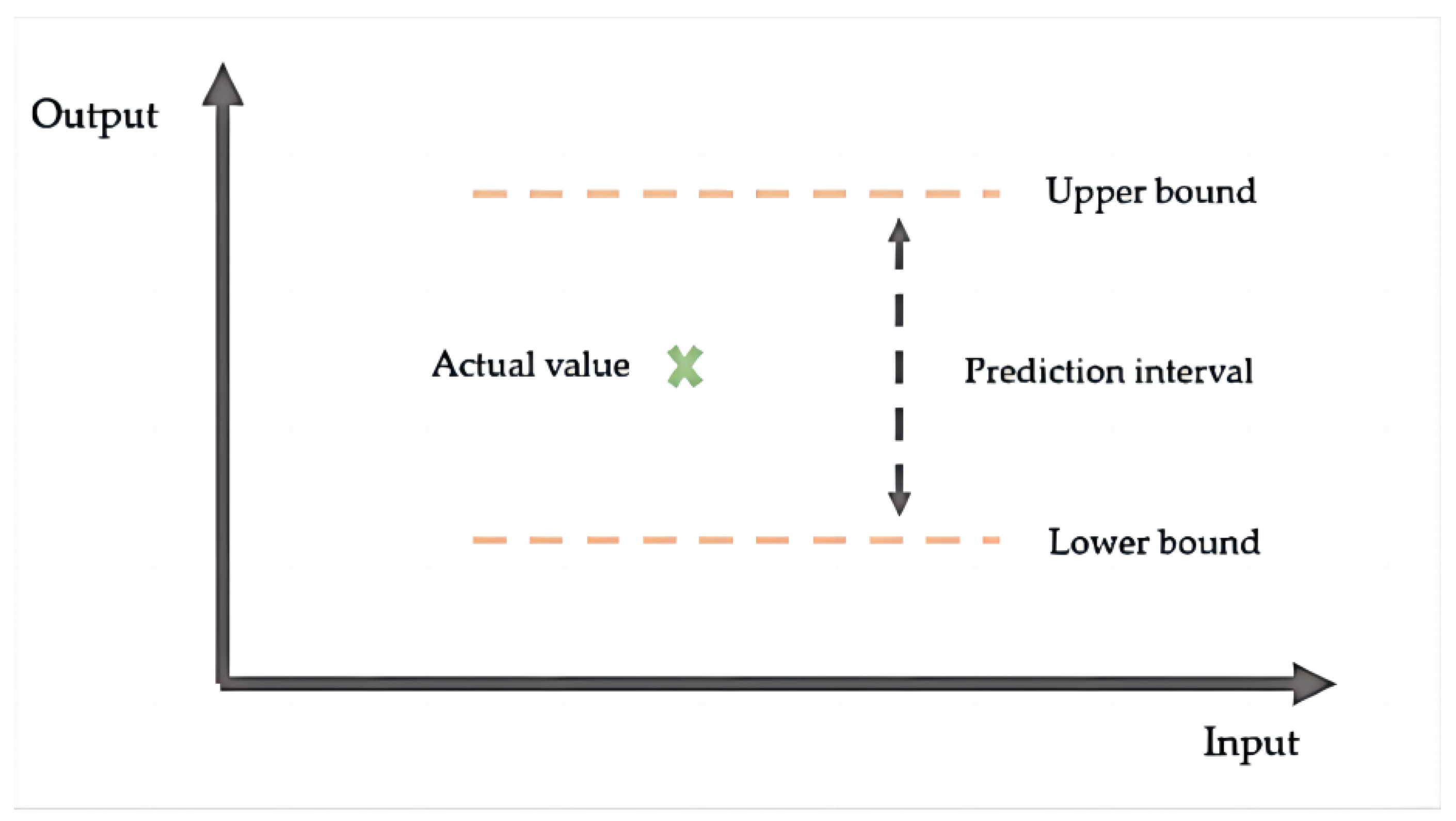
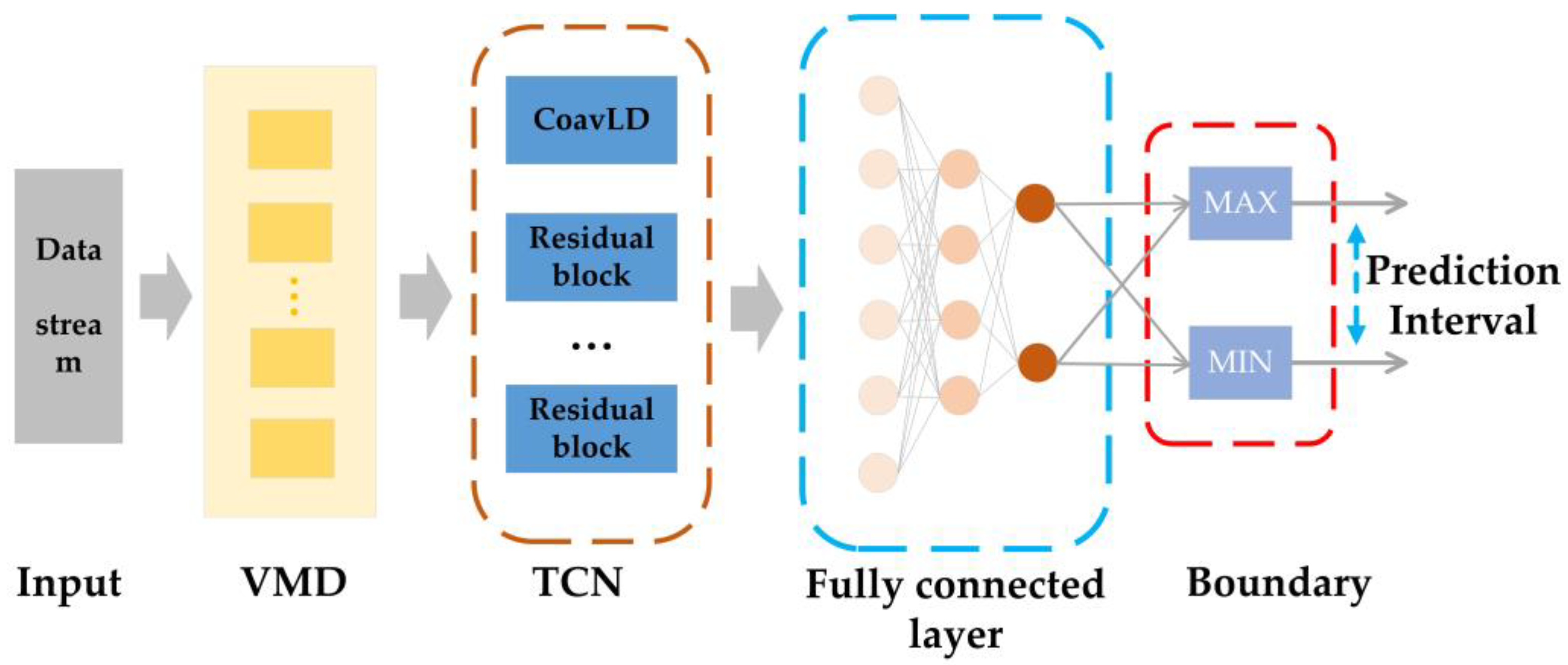
2.3. Interval Prediction Framework
2.4. Evaluation Indicators
3. Analysis and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Zhou, M.; Huang, Y.; Li, G. Changes in the concentration of air pollutants before and after the COVID-19 blockade period and their correlation with vegetation coverage. Environ. Sci. Pollut. Res. Int. 2021, 28, 23405–23419. [Google Scholar] [CrossRef] [PubMed]
- Xiao, G.; Xiao, Y.; Ni, A.; Zhang, C.; Zong, F. Exploring influence mechanism of bike sharing on the use of public transportation-a case of Shanghai. Transp. Lett. Int. J. Transp. Res. 2022, 1–9. [Google Scholar] [CrossRef]
- Wan, C.; Song, Y. Theories, Methodologies and Applications of Probabilistic Forecasting for Power Systems with Renewable Energy Sources. Autom. Electr. Power Syst. 2021, 45, 2–16. [Google Scholar]
- Huang, Y.; Zhou, N.; Zhang, S.; Yang, X.; Zhang, S.; Liu, H. Research on PV Power Forecasting Based on Wavelet Decomposition and Temporal Convolutional Networks. In Proceedings of the 2021 IEEE 4th International Electrical and Energy Conference (CIEEC), Wuhan, China, 28–30 May 2021; pp. 1–6. [Google Scholar]
- Pullanagari, R.R.; Kereszturi, G.; Yule, I.J.; Irwin, M. Determining Uncertainty Prediction Map of Copper Concentration in Pasture from Hyperspectral Data Using Quantile Regression Forest. In Proceedings of the IGARSS 2018—2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3809–3811. [Google Scholar]
- Yang, X.Y.; Zhang, Y.F.; Ye, T.Z. Prediction of Combination Probability Interval of Wind Power Based on Naive Bayes. High Volt. Technol. 2020, 46, 1099–1108. [Google Scholar]
- Xiao, G.; Cui, W. Evolutionary game between government and shipping companies based on shipping cycle and carbon quota. Front. Mar. Sci. 2023, 10, 11321. [Google Scholar] [CrossRef]
- Yang, X.Y.; Xing, G.; Ma, X. A model of quantile regression with kernel extreme learning machine and wind power interval prediction. Sol. Energy 2020, 41, 300–306. [Google Scholar]
- Yan, J.; Li, K.; Bai, E.-W.; Deng, J.; Foley, A.M. Hybrid probabilistic wind power forecasting using temporally local gaussian process. IEEE Trans. Sustain. Energy 2015, 7, 87–95. [Google Scholar] [CrossRef] [Green Version]
- Gan, Z.; Li, C.; Zhou, J.; Tang, G. Temporal convolutional networks interval prediction model for wind speed forecasting. Electr. Power Syst. Res. 2021, 191, 106865. [Google Scholar] [CrossRef]
- Chen, X.; Liu, S.; Liu, R.W.; Wu, H.; Han, B.; Zhao, J. Quantifying Arctic oil spilling event risk by integrating an analytic network process and a fuzzy comprehensive evaluation model. Ocean Coast. Manag. 2022, 228, 106326. [Google Scholar] [CrossRef]
- Khosravi, A.; Nahavandi, S.; Creighton, D.; Atiya, A.F. Lower upper bound estimation method for construction of neural network-based prediction intervals. IEEE Trans. Neural Netw. 2010, 22, 337–346. [Google Scholar] [CrossRef]
- Shrivastava, N.A.; Khosravi, A.; Panigrahi, B.K. Prediction interval estimation of electricity prices using PSO tuned support vector machines. IEEE Trans. Ind. Inf. 2015, 11, 322–331. [Google Scholar] [CrossRef]
- Viet, D.T.; Phuong, V.V.; Duong, M.Q.; Tran, Q.T. Models for Short-Term Wind Power Forecasting Based on Improved Artificial Neural Network Using Particle Swarm Optimization and Genetic Algorithms. Energies 2020, 13, 2873. [Google Scholar] [CrossRef]
- Zhang, C.; Wei, H.; Xie, L. Direct interval forecasting of wind speed using radial basis function neural networks in a multi-objective optimization framework. Neurocomputing 2016, 205, 53–63. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Rodriguez, J.; Wang, K.; Li, Y.; Fang, Y. Learning-Based Neural Dynamic Surface Predictive Control for MMC. IEEE Trans. Power Electron. 2023, 38, 53–59. [Google Scholar] [CrossRef]
- Liu, X.; Qiu, L.; Fang, Y.; Rodriguez, J. Reinforcement Learning-Based Event-Triggered FCS-MPC for Power Converters. IEEE Trans. Ind. Electron. 2023, 1–12. [Google Scholar] [CrossRef]
- Mhaskar, H.; Liao, Q.; Poggio, T. Learning functions: When is deep better than shallow. arXiv 2016, arXiv:1603.00988. [Google Scholar]
- Huang, Y.; Zhou, M.; Yang, X. Ultra-short-term photovoltaic power forecasting of multi-feature based on hybrid deep learning. Int. J. Energy Res. 2022, 46, 1370–1386. [Google Scholar] [CrossRef]
- Zhou, M.; Huang, Y.; Yang, H. Temperature forecast based on integration of GRU neural network and Grey model. J. Trop. Meteorol. 2020, 36, 855–864. [Google Scholar]
- Aly, H.H. A novel deep learning intelligent clustered hybrid models for wind speed and power forecasting. Energy 2020, 213, 118773. [Google Scholar] [CrossRef]
- Quan, H.; Srinivasan, D.; Khosravi, A. Short-term load and wind power forecasting using neural network-based prediction intervals. IEEE Trans. Neural Netw. 2014, 25, 305–315. [Google Scholar] [CrossRef]
- Kavousi-Fard, A.; Khosravi, A.; Nahavandi, S. A new fuzzy-based combined prediction interval for wind power forecasting. IEEE Trans. Power Syst. 2015, 31, 18–26. [Google Scholar] [CrossRef]
- Tahmasebifar, R.; Moghaddam, M.P.; Sheikh-El-Eslami, M.K.; Kheirollahi, R. A new hybrid model for point and probabilistic forecasting of wind power. Energy 2020, 211, 119016. [Google Scholar] [CrossRef]
- Korprasertsak, N.; Leephakpreeda, T. Robust short-term prediction of wind power generation under uncertainty via statistical interpretation of multiple forecasting models. Energy 2019, 180, 387–397. [Google Scholar] [CrossRef]
- Li, C.; Tang, G.; Xue, X. Short-term wind speed interval prediction based on ensemble GRU model. IEEE Trans. Sustain. Energy 2020, 11, 1370–1380. [Google Scholar] [CrossRef]
- Khodayar, M.; Wang, J. Spatiotemporal graph deep neural network for short-term wind speed forecasting. IEEE Trans. Sustain. Energy 2019, 10, 670–681. [Google Scholar] [CrossRef]
- Bai, S.; Kolter, J.Z.; Koltun, V. An empirical evaluation of generic convolutional and recurrent networks for sequence modeling. arXiv 2018, arXiv:1803.01271. [Google Scholar]
- Wan, R.; Mei, S.; Wang, J. Multivariate temporal convolutional network: A deep neural networks approach for multivariate time series forecasting. Electronics 2019, 8, 876. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Wang, X.; Jung, C. DCSR: Dilated convolutions for single image super-resolution. IEEE Trans. Image Process. 2019, 28, 1625–1635. [Google Scholar] [CrossRef]
- Zhang, K.; Sun, M.; Han, T.X. Residual networks of residual networks: Multilevel residual networks. IEEE Trans. Circuits Syst. Video Technol. 2018, 28, 1303–1314. [Google Scholar] [CrossRef] [Green Version]
- Vaswani, A.; Shazeer, N.; Parmar, N. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems 30: Annual Conference on Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Chen, X.; Wu, S.; Shi, C.; Huang, Y.; Yang, Y.; Ke, R.; Zhao, J. Sensing Data Supported Traffic Flow Prediction via Denoising Schemes and ANN: A Comparison. IEEE Sens. J. 2020, 20, 14317–14328. [Google Scholar] [CrossRef]
- Zheng, J. Experimental study of IMF component determination Criterion Method in empirical mode decomposition. Geomat. Geogr. Inf. Technol. 2021, 46, 33–37. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
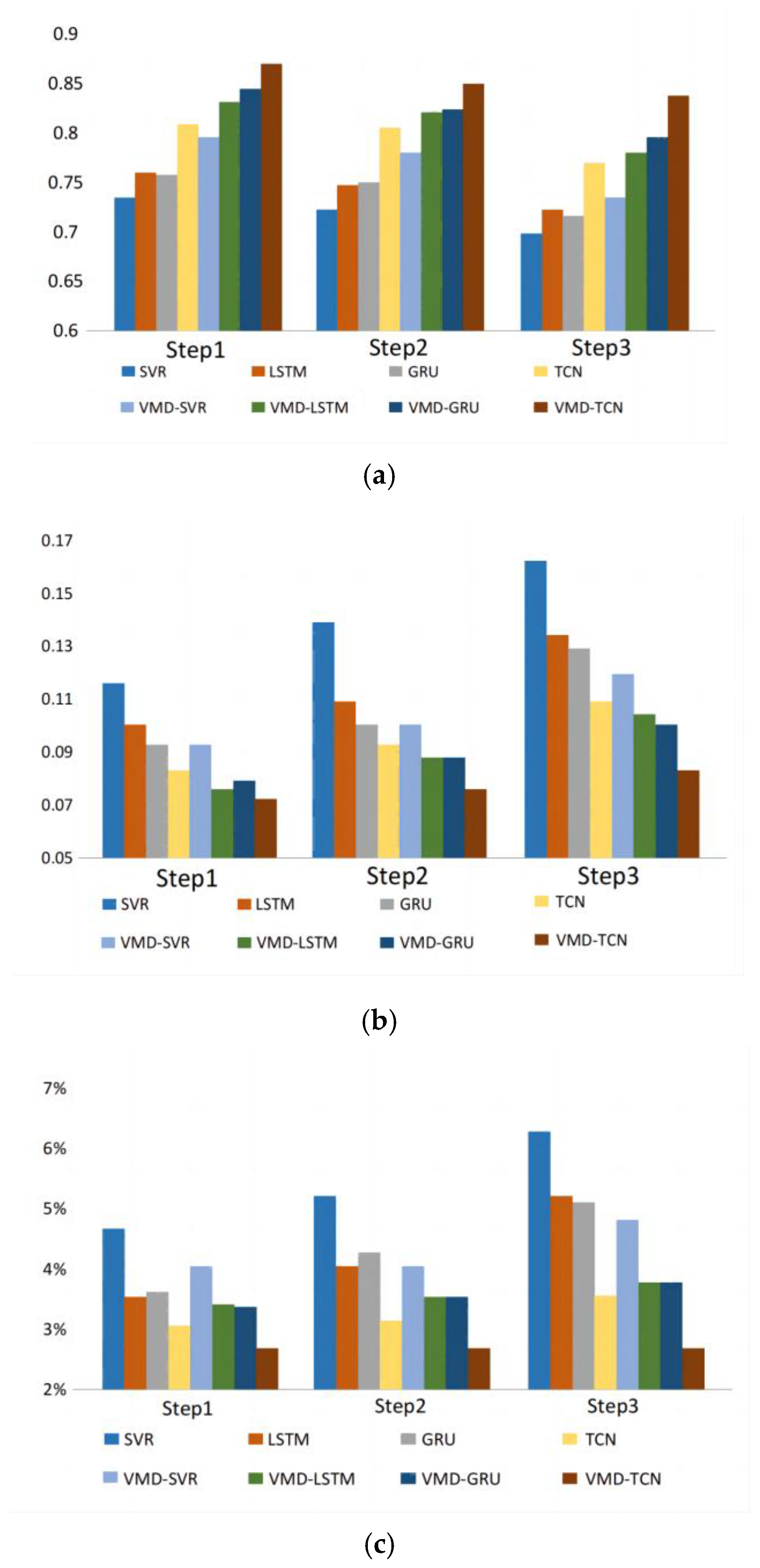
| Model | PICP | CWC | ERROR |
|---|---|---|---|
| SVR | 0.690 | 0.123 | 4.643 |
| LSTM | 0.718 | 0.105 | 3.656 |
| GRU | 0.716 | 0.099 | 3.716 |
| TCN | 0.768 | 0.089 | 2.951 |
| VMD-SVR | 0.725 | 0.098 | 4.138 |
| VMD-LSTM | 0.821 | 0.081 | 3.441 |
| VMD-GRU | 0.826 | 0.083 | 3.413 |
| VMD-TCN | 0.882 | 0.073 | 2.713 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, S.; Zhao, S. Wind Power Interval Prediction via an Integrated Variational Empirical Decomposition Deep Learning Model. Sustainability 2023, 15, 6114. https://doi.org/10.3390/su15076114
Zhao S, Zhao S. Wind Power Interval Prediction via an Integrated Variational Empirical Decomposition Deep Learning Model. Sustainability. 2023; 15(7):6114. https://doi.org/10.3390/su15076114
Chicago/Turabian StyleZhao, Shuling, and Sishuo Zhao. 2023. "Wind Power Interval Prediction via an Integrated Variational Empirical Decomposition Deep Learning Model" Sustainability 15, no. 7: 6114. https://doi.org/10.3390/su15076114