1. Introduction
The exploitation of marine resources is rising along with the scarcity of land resources, which considerably accelerates the development of the Internet of Underwater Things (IoUT). At the same time, a new type of smart city has aroused widespread attention, and researchers have accordingly proposed marine smart cities, e.g., the oceanix city [
1], smart coastal city [
2], and underwater smart cities [
3]. The IoUT is defined as a worldwide network of interconnected underwater objects [
4], considered as one of the potential inventions for creating smart city communities [
5], and has become one of the current research hotspots in the marine field.
Data collection is an important application of the IoUT. An Autonomous Underwater Vehicle (AUV) is mainly used to collect data in the network, and a large number of AUV path planning algorithms have been proposed accordingly. However, considering path planning alone is not enough to accomplish efficient underwater data collection. It is commonly known that the MAC protocol plays a crucial role in data transmission, which is designed to solve the competition issue for shared channels. Hence, this study focuses on the design of a MAC protocol for AUV-assisted underwater data collection.
Unlike terrestrial wireless communication, electromagnetic waves attenuate too much in seawater and it is not suitable for underwater environments, while acoustic waves have less propagation attenuation compared to electromagnetic waves and can be used for long-distance data transmission. Hence, acoustic waves are usually used for underwater communication. However, the underwater acoustic signal propagation speed is slow and the underwater environment is complex and changeable, which brings difficulties to the MAC protocol design.
The current underwater MAC protocols are mainly classified into two categories: contention-based MAC protocols and contention-free MAC protocols. ALOHA is a common contention-based MAC protocol. In this protocol, when a node has data to transmit, it can send it directly. If one of its neighboring nodes receives data from only one node at a time, then the packet can be successfully received. Otherwise, data sent by multiple nodes may conflict at the receiver and cause packet loss. In [
6], the performance of ALOHA for underwater acoustic sensor networks is carefully analyzed. L.G. Roberts proposed the Slotted-ALOHA [
7] protocol, which divides the time into equal time slots. Unlike Aloha, nodes in the Slotted-ALOHA are not able to send information at any time but rather only at the beginning of the time slot. To further reduce conflicts, a carrier-based listening multiple access (CSMA)-based protocol is proposed, where each node determines whether a conflict occurs and chooses the appropriate retreat time for data transmission by listening to the channel. In [
8], a contention-based protocol named EAST (contention-based MAC protocol) is proposed for the IoUT, in which each node can change its role and switch its sleep/wake state based on the data buffer usage and network traffic load to save energy and improve the channel utilization.
The contention-free MAC protocols enable conflict-free data transmission by allocating different resources such as a spectrum or time slots to each node. FDMA, CDMA, and TDMA are all contention-free MAC protocols. FDMA divides the available frequency bands into sub-bands and assigns each sub-band to a single user for data transmission. M. Hayajneh et al. proposed an orthogonal frequency division multiple access-based underwater MAC protocol [
9] to ensure that nodes using different frequency bands can transmit simultaneously without conflict. I. Khalil et al. proposed an adaptive underwater MAC protocol based on orthogonal frequency division multiple access [
10] to obtain better utilization of frequency band resources. In [
11,
12], two kinds of CDMA-based MAC protocols were proposed for underwater acoustic sensor networks. TDMA allocates separate time slots to each individual user, thus achieving conflict-free transmission. For example, in [
13,
14], the graph coloring method and the interference-free graph were adopted to allocate time slots for nodes, respectively. In [
15], each node generates a time-slot scheduling table by seeding and shares the scheduling table with neighboring nodes, thus reducing the control overhead of the data transmission. In [
16], the interference is reduced and the throughput is increased by having the interference of multiple nodes overlap in the same time slot as much as possible.
The above-mentioned typical contention-free MAC protocol, with its channel non-competitive sharing property, can ensure efficient and conflict-free data transmission under a heavy network load and achieve high network throughput; however, it is also constrained by this feature, which makes it unable to allocate channel resources efficiently and flexibly under a light network load and has a high delay overhead. Similarly, a typical contention-based MAC protocol, with flexible channel access, can efficiently complete the data transmission with low latency when the network load is light; however, when the network service load is heavy, the degree of competition for channels among nodes increases, making data conflicts serious. In addition, when the IoUT performs tasks such as underwater data collection, the network topology constantly changes with the task requirements and the marine environment, and the changing topology further affects the channel utilization efficiency, intensifying the conflict of data packets, which in turn affects the protocol performance. In short, the above-mentioned traditional MAC cannot be directly used in mobile data collection scenarios.
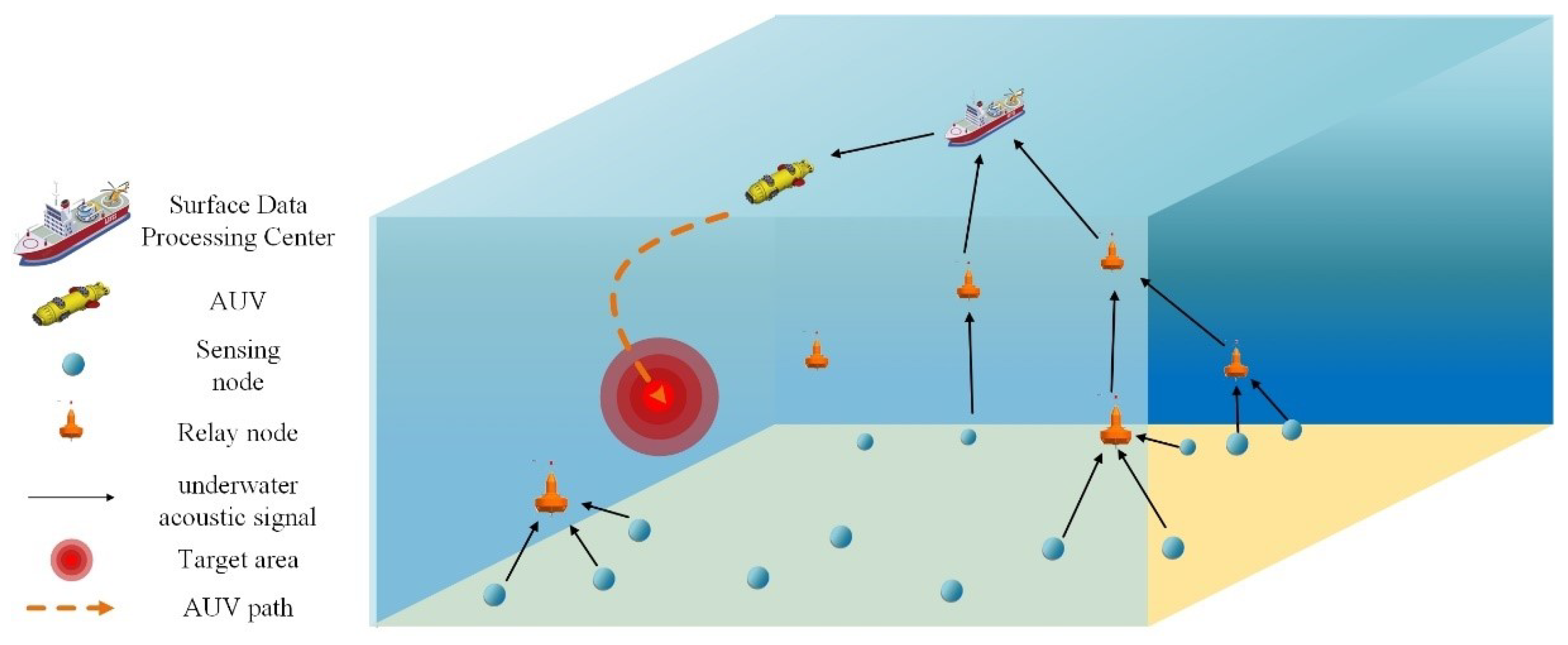
Figure 1 shows an example scenario of AUV-assisted data collection in the IoUT. Sensor nodes are randomly deployed and are responsible for sensing and monitoring environmental data and transmitting the data to the surface destination, i.e., the surface data processing center, via a multi-hop approach. Among them, the nodes responsible for forwarding consume more energy and create routing voids. Some of the nodes may also be detached from the original network due to factors such as ocean currents. In this case, the data collection is assisted by an AUV moving to the target area, e.g., routing voids.
The contributions of this paper are presented as follows:
In mobile data acquisition, three types of interference are taken into account, e.g., send interference, receive interference, and send/receive interference. In addition, the data conflicts between adjacent nodes and the link interference between nodes and an AUV are analyzed. Based on this, an Interference Cancellation Graph is established.
A MAC Protocol based on an Interference Cancellation Graph (ICG-MAC) is proposed for the AUV-assisted IoUT. It ensures that AUVs can join the network for data transmission immediately after arriving at the target area and do not interfere with the normal work of other sensor nodes.
The remainder of this paper is organized as follows. The next section introduces the related work;
Section 3 describes the system model, including the network model and channel model;
Section 4 describes the detail of the proposed ICG-MAC;
Section 5 presents simulations to analyze the performance of the ICG-MAC; and the conclusion follows in
Section 6.
4. A MAC Protocol Based on Interference Cancellation Graph
This section presents the details of the proposed ICG-MAC. In the process of data transmission, the target areas that require AUV traversal for data collection are first identified. Then, conflict-free time slots are assigned to nodes in the target region based on Interference Cancellation Graph. Finally, the AUV moves to the target region for data collection. Hence, in this section, the ICG-MAC is presented, including four parts: (1) network initialization, (2) time-slot allocation, (3) target area determination, and (4) conflict-free data collection.
4.1. Network Initialization
During the initialization phase, network layering is first performed. Nodes in different layers of the network can multiplex time slots for data transmission. Then, in each layer, the LEADER node is selected, and the LEADER node is responsible for the distributed and conflict-free time-slot allocation of neighboring nodes.
4.1.1. Network Layering
Inspired by the idea of network layering, the AUV-assisted MAC protocol is designed. As illustrated in
Figure 3, nodes in two adjacent layers use different time frames, and layers more than two layers apart can use the same time frames for conflict-free data transmission [
13]. In this study, the network is first layered by depth and then time slots are assigned for the nodes. The layer number is calculated by Equation (
5) as follows:
where
W is the height of a layer,
is the depth of the node, and
is the number of divided time frames, which is usually taken as 3 when
W is the maximum communication radius of the node.
4.1.2. Leader Node Selection
During the initialization phase, each node exchanges information with its neighboring nodes by broadcasting its own node ID in the control channel. This process continues for some time to ensure that each node can obtain information about its neighbor nodes. Meanwhile, during the data transmission phase, nodes can obtain the neighbor information by parsing the data header. In order to design the conflict-free MAC protocol, this study first sets the node priority. In the time-slot allocation process, time slots are allocated for the nodes with high priority first. The node priority is set by Equation (
6) as follows:
where
d is the node degree,
is the normalized residual energy, and
is the layer number of the node.
The network has been layered above, and the next discussion focuses on the time-slot allocation algorithm for the sensor nodes located in the same layer. The first step is to elect the leader node in the same layer. The role of the leader node is to broadcast the time-slot scheduling information, so the leader node should cover as many nodes as possible. The nodes closer to the middle region in the same layer can cover a larger area and have a higher chance of covering more nodes. As shown in
Figure 4, a layer in the network is marked as a rectangular region of
. A cylindrical region with bottom radius
is divided in the center of this rectangular area.
is set as
in this study, and the nodes located in the cylindrical region are the candidate nodes for leader. The node with the largest
p-value among all candidate nodes is selected as the leader and is responsible for the time-slot scheduling of the neighboring nodes.
4.2. Time-Slot Allocation
Subject to the limitations of the communication range, nodes that are too far away can use the same time slot or frequency for data transmission without causing interference. Therefore, in order to improve the multiplexing rate of time slots, this study layers the network to ensure that nodes in the layer with a long distance can use the same time slot for communication. Then, different priority levels are assigned to nodes, in order to prioritize time slots for the nodes with more neighbor nodes, more data, and less residual energy to help them transmit data successfully. Finally, in the same layers, nodes are allocated conflict-free time slots based on the analysis of interference models and the creation of Interference Cancellation Graphs. Hence, in this sub-section, the analysis of interference models and the creation of Interference Cancellation Graph are presented, respectively.
4.2.1. Interference Model
In order to design conflict-free MAC, an Interference Cancellation Graph is investigated. In this study, three types of interference are taken into account, e.g., send interference, receive interference, and send/receive interference. As illustrated in
Figure 5a, node A and node C cannot send different messages to node B at the same time, which is send interference. As illustrated in
Figure 5b, node B cannot send different messages to node A and node C at the same time, which is receive interference. As illustrated in
Figure 5c, in half-duplex condition, node B cannot send information to node C while receiving information from node A. This is send/receive interference.
4.2.2. Interference Cancellation Graph
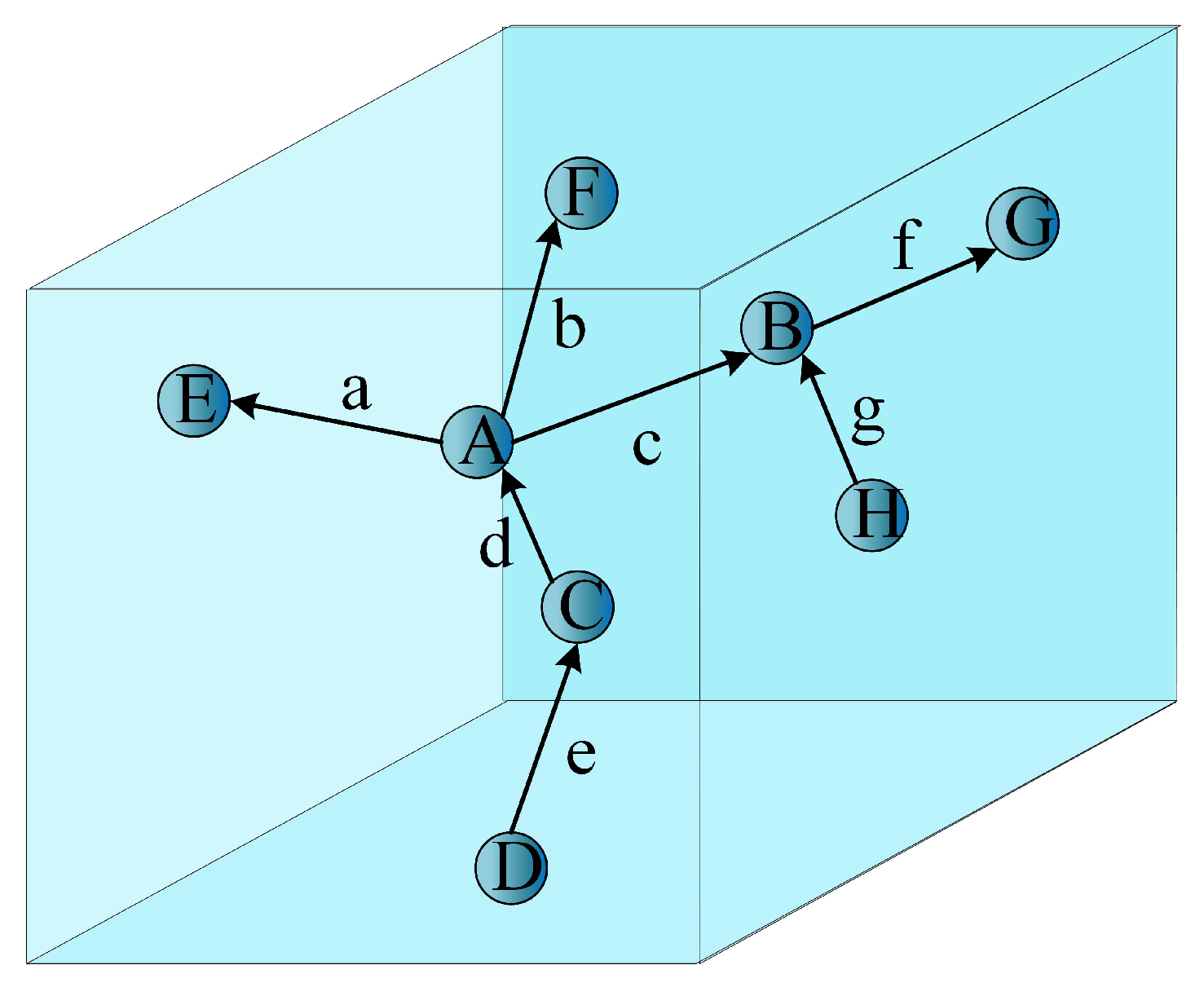
Based on the interference model, the interference graph is established. Assume that
Figure 6 shows an actual distribution scenario of nodes, where upper case letters denote nodes and lower case letters denote communication links.
In the traditional construction of a directionless interference graph, adjacent links, or links with common adjacent links are considered to interfere with each other. For example, link
c is adjacent to links
a and
f. It generates receive interference at endpoint
B of link
c. The interference graph is obtained as shown in
Figure 7a. However, in the scenario discussed in this study, data are transmitted from bottom to top, and nodes on the same layer do not transmit downward or parallel, and information is only sent from endpoint
B to endpoint
G. Therefore, interference between link
a and link
f is eliminated. The interference graph after optimization is shown in
Figure 7b.
On the basis of the interference graph derived above, the vertex set
V is obtained. First, the vertex with the largest
p-value is selected and assigned a time slot for it in priority. Then, the vertices with no interference are added to the set
S. All the vertices that have been assigned time slots are removed from the vertex set
V. The above process is repeated until the vertex set
V is empty. As shown in
Figure 8, suppose the
p-values of vertices are
, the time-slot allocation process of this graph is as follows. The vertex with the largest
p-value is
C, and the vertex not connected to it is
E. Therefore, there is no interference between
C and
E, and they can share the same time slot. Remove vertices
C and
E from the set of vertices
V and add them to the set
S. When the
p-values of vertices are the same, a node can be randomly selected for time-slot allocation. For example, node
D is selected. There is no interference between nodes
G,
F, and
D; however, because node
F has a higher priority, nodes
D and
F are first allocated with the same time slot. Then, continue to allocate time slot for nodes
B and
G. Finally, node
A is left with a single time slot.
4.3. Target Area Determination
Network connectivity is very important for real-time data transmission [
25]. To ensure that the network can transmit data efficiently and stably, it is essential to determine that the nodes in the network are connected to each other. In [
26], a relay location selection algorithm (RLSA) is proposed that can ensure network connectivity with a minimum number of forwarding nodes. In [
27], the effect of ocean waves is considered to ensure the connectivity of the network by adding redundant nodes. In [
28], a cluster head selection scheme is proposed. The nodes select appropriate cluster heads based on the neighbor density. The cluster heads collect the data of the member nodes in the cluster and then transmit it to the buoy nodes, finding a balance between ensuring network connectivity and saving energy. In [
29], the influence of the number of nodes and transmission range on network connectivity was explored. In the above research, network connectivity is ensured by node placement in the network initialization phase or by clustering. In the above study, network connectivity was ensured by arranging node locations during the initialization phase or by using a clustering approach. These methods are not applicable in networks with dynamically changing network topology. Hence, in this study, the connectivity and robustness of the network are greatly improved by introducing AUV-assisted sensor nodes for data transmission.
The underwater environment is complex and volatile, and the network topology changes over time. Nodes may be disconnected from the network due to drifting currents or the influence of marine life such as fish, or the original network topology may be affected by energy depletion and death. Hence, in this study, firstly, the important nodes that change the network topology need to be identified. Secondly, the AUV moves to the network area where these nodes are located to assist in data collection, and then the MAC protocol is designed for time-slot allocation.
A network can be modeled as a graph, denoted by
, where the nodes in the network are the vertices of the graph, denoted by
V, and the communication links that exist between the nodes are the edges of the vertices, denoted by
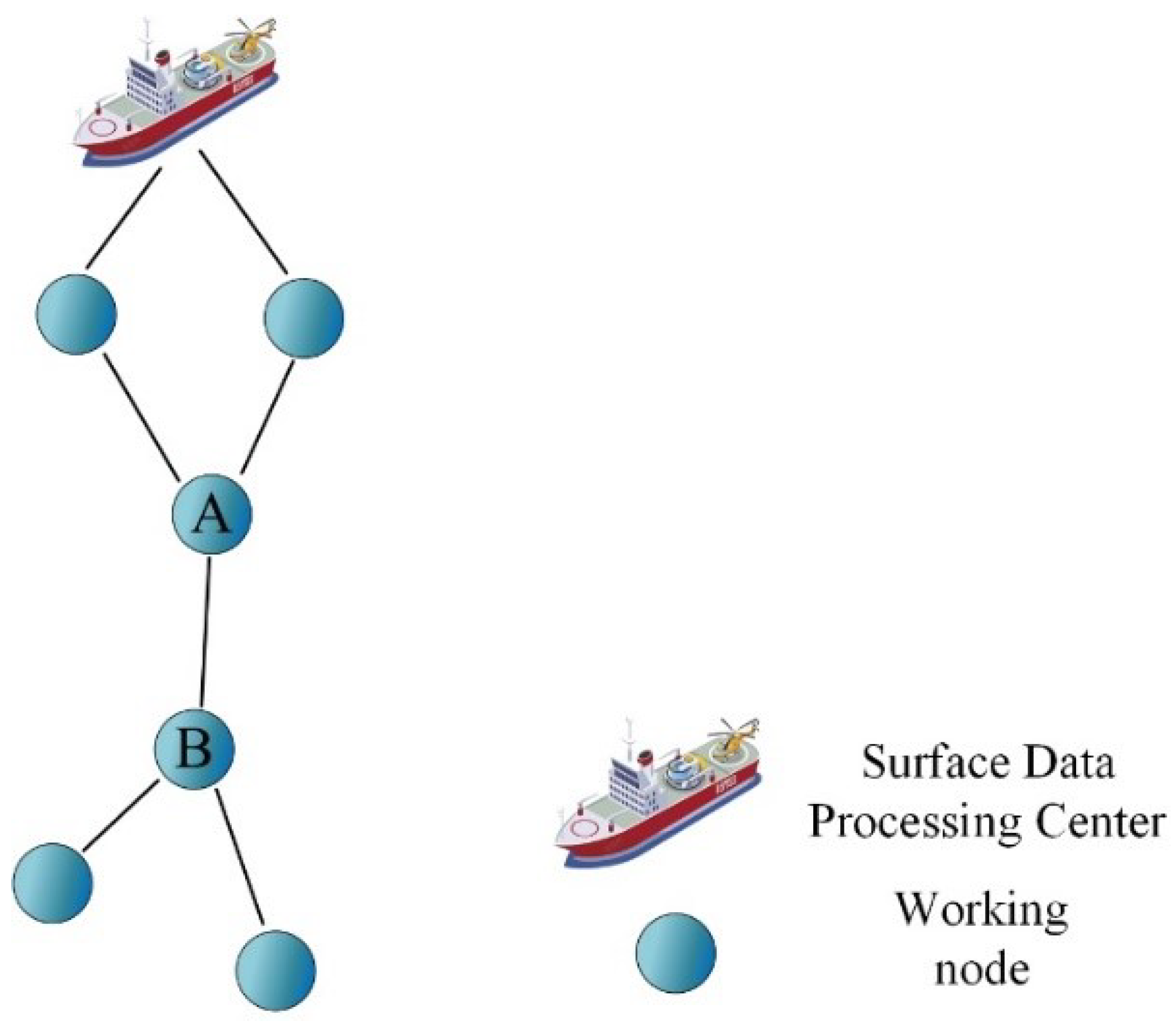
E. If after eliminating a point in the graph and the edges connected to it, it appears that two points cannot be connected in the graph, and the removed point is named the cut vertex of the graph. As illustrated in
Figure 9, node A and B are cut vertexes. If the cut vertexes are disconnected, the data cannot be transmitted. Hence, this study uses AUV to connect the area where the cut vertexes are located for data collection.
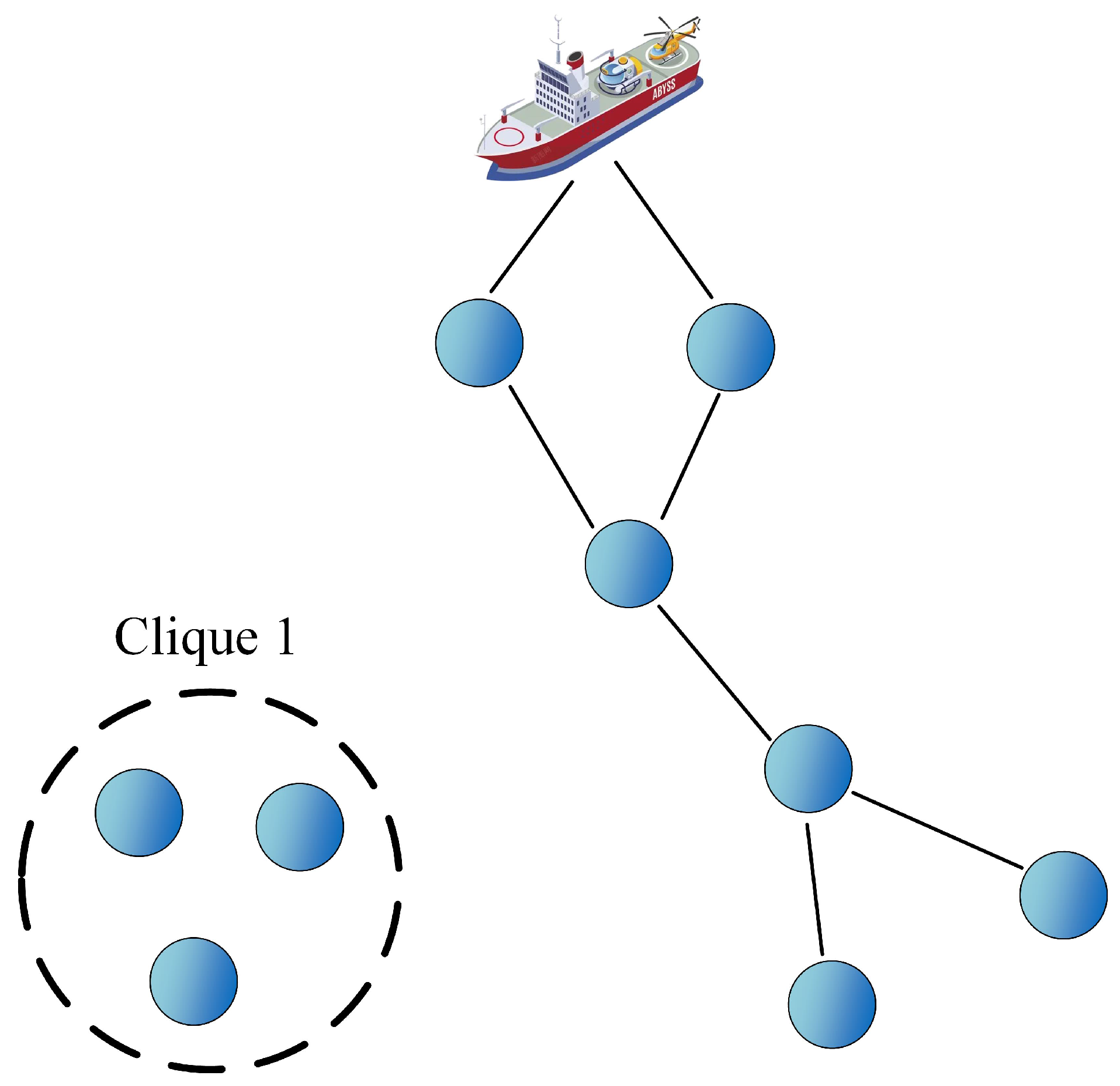
If the cut vertex is an isolated node, then the AUV can go directly to the location of the node for data collection. If the cut vertex causes several nodes to be unconnected, a clique of vertexes disengage from the original network, as shown in
Figure 10. As the AUV moves to the cut clique, many vertexes need to upload data, so a conflict-free time-slot allocation mechanism is required for these nodes. In this study, all the isolated vertexes or cut cliques form the target region. The target region search needs to be performed first, and the AUV moves to the target region for data collection. In order to find the target area, the “importance” value of each node in the target area is defined by Equation (
7) as follows:
where
d is the degree of the vertex, i.e., the number of neighbors of the node,
is the residual energy of the node, and
is the initial energy of the node.
I is proportional to
d because the higher the number of neighboring nodes, the heavier the amount of data forwarding, and therefore the more important the node is. The residual energy and the “importance” value are inversely related because the lower the energy, the higher the risk of the node dying, so the AUV is urgently needed to share the data transmission task.
For a cut clique, its “importance” value is calculated by Equation (
8):
where
n is the number of vertexes in the cut clique, and
is the “importance” value of the
i-th vertex. AUV traverses target areas for data collection based on the order of “importance” values, from largest to smallest.
4.4. Conflict-Free Data Collection
When the AUV reaches the target area, it needs to join the original network for data transmission, then how to join the network with minimum conflict cost is the focus of study in this section.
The number of edges of an undirected complete graph with n vertices is . When a new node is added to the network, then the number of edges increases by . That is, the least desirable case is that communication links exist between the newly added node and the previous n nodes, at which point the newly added node requires n time slots. Therefore, to enable an AUV to join the network without affecting the original communication of the network without conflict, sufficient communication time slots need to be reserved for the AUV.
In this study, each time slot that has been allocated is further divided into two sub-time slots. When the AUV performs data collection, a notification packet is broadcast through the control channel. All nodes that receive the notification packet and have data packets to be transmitted concede one of the sub-time slots to communicate with the AUV and keep one of the sub-time slots to maintain the original data communication in the network. As shown in
Figure 11, the green squares indicate the packets sent by node 1, the red squares indicate the packets sent by node 2, and the small yellow squares indicate the control packets of AUV. Before the AUV is reached, two sub-time slots are used for data transmission between nodes 1 and 2. After the AUV arrives, the notification packet is broadcast first for data set. Both nodes 1 and 2 yield the time slot denoted by
a to deliver packets to the AUV and reserve the time slot denoted by
b for data transmission with neighboring nodes.
6. Conclusions
For the problems of unstable data transmission and energy limitation in the IoUT, this paper proposes an AUV-assisted MAC protocol, named ICG-MAC, which effectively improves the network connectivity and network throughput and alleviates the hot-zone problem. The protocol is mainly divided into three parts. First, the surface data processing center calculates the location of the nodes that need AUV-assisted data transmission nodes, i.e., the target area, based on the location of the nodes and residual energy. Then, based on the link interference model, an interference-free map is established and time slots are allocated for the nodes in the target area. Finally, when the AUV arrives at the designated area, it takes up part of the data transmission work without affecting the nodes in the network that are operating normally, relieving the network congestion and improving the network throughput.
In future work, the cooperative data transmission problem among multiple AUVs will be further investigated. First, the issue of path planning for multiple AUVs should be investigated. In this paper, we study the target area search and assume that AUVs can arrive in a straight line as soon as possible, while in practical applications, the movement of AUVs is affected by environmental factors such as obstacles, thus reducing the efficiency of the data collection. Second, a more intelligent allocation algorithm that combines the factors of energy, location, and communication resources to assign tasks to different AUVs in a more reasonable and efficient way is required. Last but not least, the safety issue in data collection has been neglected. Nodes are generally considered to be reliable and trustworthy. However, in practice, the network is vulnerable to malicious attacks due to its openness and unattended nature. It is important to identify the reliability of nodes and motivate them to actively participate in collaborative data forwarding.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}