
A Study and Implementation of Inductive Power Transfer System Using Hybrid Control Strategy for CC-CV Battery Charging

Abstract
:1. Introduction
2. Analysis of SS-Compensated IPT System
2.1. System Specifications
2.2. Steady-State Analysis of Pulse Frequency Modulation
- (1)
- The inductance of the primary and secondary coil must be quite large to achieve the desired mutual inductance M. For instance, the output current at γ = 1 is approximately inversely proportional to M, i.e., Io = Vin/(ωM). Assuming that the operating frequency is 85 kHz and k = 0.2, M = 187 μH and the inductance of Lp and Ls is about 0.94 mH. Accordingly, the ac resistance of Litz-wire is quite large, which significantly degrades the overall efficiency.
- (2)
- The current of primary coil ip turns out to be infinite in the absence of a secondary coil, which may damage the switches.
2.3. Operation Principle of ZVS Tracking
2.4. Limitation in Degree of Freedom for VF Control
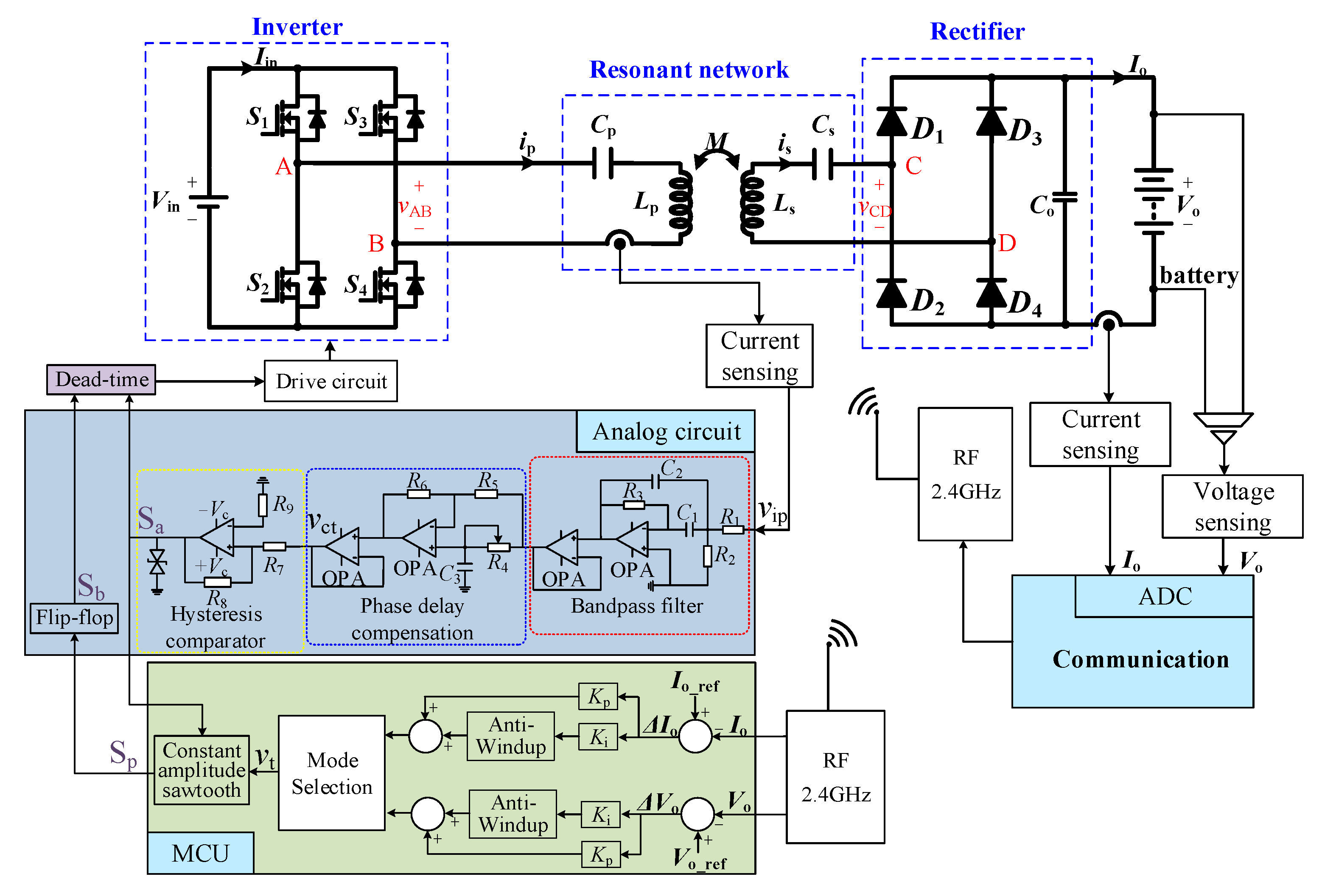
3. Implementation of Hybrid Control Strategy
Self-Oscillating Phase Shift Control Strategy
4. Experimental Verifications
4.1. Operation Waveforms
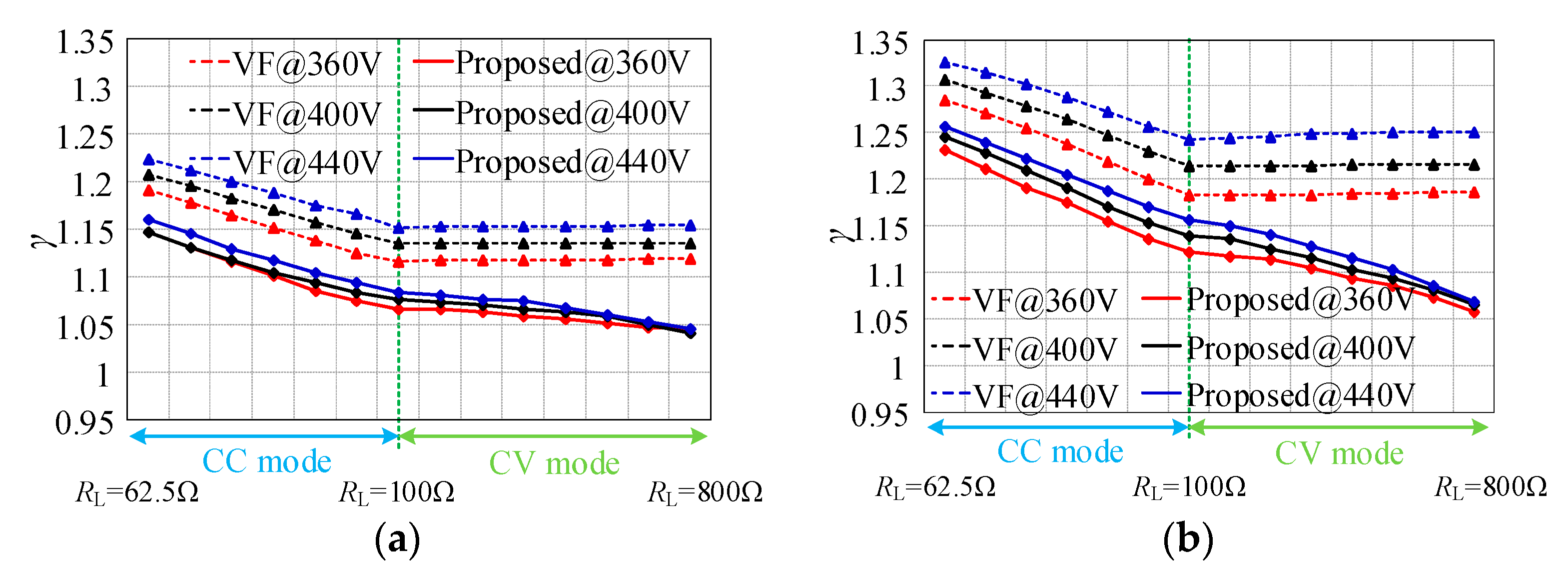
4.2. System Efficiency
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| IPT | Inductive power transfer |
| ZVS | Zero voltage switching |
| CC | Constant current |
| CV | Constant voltage |
| SO | Self-oscillating |
| PS | Phase shift |
| SS | Series-series |
| VF | Variable frequency |
| EV | Electric vehicle |
| EMI | Electromagnetic interference |
| ZPA | Zero phase angle |
| PWM | Pulse width modulation |
| PDM | Pulse density modulation |
| PLL | Phase-locked loop |
| VI | Variable inductor |
| FHA | Fundamental harmonic approximation |
| Vin | DC input voltage |
| Si | ith MOSFET in the inverter |
| Cp | Primary-side capacitor |
| Lp | Transmitter coil |
| Ls | Receiver coil |
| Cs | Secondary-side capacitor |
| Di | ith diode in the rectifier |
| Co | Output filter capacitor |
| Vo | Charging voltage |
| Io | Charging current |
| vp | Inverter output voltage |
| ip | Inverter output current |
| vs | Rectifier input voltage |
| is | Rectifier input current |
| Rac | Equivalent load resistance |
| M | Mutual Inductance |
| ω | Switching angular frequency of the system |
| Izvs | Commutation current |
| α | Inductance ratio of transmitter coil over receiver coil |
| γ | Normalized switching frequency |
| XLs | Impedance of receiver coil |
| Q | Load quality factor |
| Gv | Steady-state voltage gain |
| φ | Input impedance angle |
| k | Coupling coefficient |
| d | Air gap |
| Dout | Maximum coil diameter |
| RL | Load resistance |
| Qr | Charge on the parasitic capacitor of the MOSFET |
| Coss | Capacitance of parasitic capacitor of the MOSFET |
| Vds | Drain-source voltage of the parasitic capacitor of the MOSFET |
References
- Ahn, D.; Hong, S. Wireless power transmission with self-regulated output voltage for biomedical implant. IEEE Trans. Ind. Electron. 2014, 61, 2225–2235. [Google Scholar] [CrossRef]
- Xiao, C.; Cheng, D.; Wei, K. An LCC-C compensated wireless charging system for implantable cardiac pacemakers: Theory, experiment, and safety evaluation. IEEE Trans. Power Electron. 2018, 33, 4894–4905. [Google Scholar] [CrossRef]
- Jang, Y.; Jovanovic, M.M. A contactless electrical energy transmission system for portable-telephone battery chargers. IEEE Trans. Ind. Electron. 2003, 50, 520–527. [Google Scholar] [CrossRef] [Green Version]
- Hui, S.Y.R.; Ho, W.W.C. A new generation of universal contactless battery charging platform for portable consumer electronic equipment. IEEE Trans. Power Electron. 2005, 20, 620–627. [Google Scholar] [CrossRef]
- Zhao, L.; Thrimawithana, D.; Madawala, U. Hybrid bidirectional wireless EV charging system tolerant to pad misalignment. IEEE Trans. Ind. Electron. 2017, 64, 7079–7086. [Google Scholar] [CrossRef]
- Guo, Y.; Wang, L.; Zhu, Q.; Liao, C.; Li, F. Switch-on modeling and analysis of dynamic wireless charging system used for electric vehicles. IEEE Trans. Ind. Electron. 2016, 63, 6568–6579. [Google Scholar] [CrossRef]
- Chen, C.; Zhou, H.; Deng, Q.; Hu, W.; Yu, Y.; Lu, X.; Lai, J. Modeling and decoupled control of inductive power transfer to implement constant current/voltage charging and zvs operating for electric vehicles. IEEE Access 2018, 6, 59917–59928. [Google Scholar] [CrossRef]
- Li, Z.; Zhu, C.; Jiang, J.; Song, K.; Wei, G. A 3-kW wireless power transfer system for sightseeing car supercapacitor charge. IEEE Trans. Power Electron. 2017, 32, 3301–3316. [Google Scholar] [CrossRef]
- Kim, J.H.; Lee, B.S.; Lee, J.H.; Lee, S.H.; Park, C.B.; Jung, S.M.; Lee, S.G.; Yi, K.P.; Baek, J. Development of 1-MW inductive power transfer system for a high-speed train. IEEE Trans. Ind. Electron. 2015, 62, 6242–6250. [Google Scholar] [CrossRef]
- Jiang, Y.; Chen, K.; Zhao, Z.; Yuan, L.; Tan, T.; Lin, Q. Designing an M-Shape Magnetic Coupler for the Wireless Charging System in Railway Applications. IEEE Trans. Power Electron. 2022, 37, 1059–1073. [Google Scholar] [CrossRef]
- Chan, C.C.; Jian, L.; Tu, D. Smart charging of electric vehicles—Integration of energy and information. IET Electr. Syst. Transp. 2014, 4, 89–96. [Google Scholar] [CrossRef] [Green Version]
- He, L.; Zhao, S.; Wang, X.; Lee, C.-K. Artificial Neural Network-Based Parameter Identification Method for Wireless Power Transfer Systems. Electronics 2022, 11, 1415. [Google Scholar] [CrossRef]
- Bosshard, R.; Kolar, J.W. Inductive power transfer for electric vehicle charging: Technical challenges and tradeoffs. IEEE Power Electron. Mag. 2016, 3, 22–30. [Google Scholar] [CrossRef]
- Al-Saadi, M.; Al-Omari, A.; Al-Chlaihawi, S.; Al-Gizi, A.; Crăciunescu, A. Inductive Power Transfer for Charging the Electric Vehicle Batteries. Electroteh. Electron. Autom. 2018, 66, 29–39. [Google Scholar]
- Jiang, Y.; Wang, L.; Wang, Y.; Liu, J.; Li, X.; Ning, G. Analysis, design, and implementation of accurate ZVS angle control for EV battery charging in wireless high-power transfer. IEEE Trans. Ind. Electron. 2019, 66, 4075–4085. [Google Scholar] [CrossRef]
- Wang, X.; He, L.; Xu, J.; Lee, C.K. Widening the Operating Range of a Wireless Charging System Using Tapped Transmitter Winding and Bifrequency Pulse Train Control. IEEE Trans. Power Electron. 2022, 37, 13874–13883. [Google Scholar] [CrossRef]
- Deng, P.; Tang, C.; Fan, Y.; Sun, M.; Liu, Z.; Li, X. A Frequency Regulation Strategy for Dynamic Process Noise Suppression in LCC-S WPT Systems. IEEE Trans. Power Electron. 2022, 37, 13978–13988. [Google Scholar] [CrossRef]
- Qu, X.; Han, H.; Wong, S.; Tse, C.K.; Chen, W. Hybrid IPT topologies with constant current or constant voltage output for battery charging applications. IEEE Trans. Power Electron. 2015, 30, 6329–6337. [Google Scholar] [CrossRef]
- Mai, R.; Chen, Y.; Li, Y.; Zhang, Y.; Cao, G.; He, Z. Inductive Power Transfer for Massive Electric Bicycles Charging Based on Hybrid Topology Switching with a Single Inverter. IEEE Trans. Power Electron. 2017, 32, 5897–5906. [Google Scholar] [CrossRef]
- Chen, Y.; Yang, B.; Li, Q.; Feng, H.; Zhou, X.; He, Z.; Mai, R. Reconfigurable Topology for IPT System Maintaining Stable Transmission Power over Large Coupling Variation. IEEE Trans. Power Electron. 2020, 35, 4915–4924. [Google Scholar] [CrossRef]
- Qu, X.; Jing, Y.; Han, H.; Wong, S.; Tse, C.K. Higher order compensation for inductive-power-transfer converters with constant-voltage or constant-current output combating transformer parameter constraints. IEEE Trans. Power Electron. 2017, 32, 394–405. [Google Scholar] [CrossRef]
- Vu, V.; Tran, D.; Choi, W. Implementation of the constant current and constant voltage charge of inductive power transfer systems with the double-sided LCC compensation topology for electric vehicle battery charge applications. IEEE Trans. Power Electron. 2018, 33, 7398–7410. [Google Scholar] [CrossRef] [Green Version]
- Song, K.; Li, Z.; Jiang, J.; Zhu, C. Constant current/voltage charging operation for series–series and series–parallel compensated wireless power transfer systems employing primary-side controller. IEEE Trans. Power Electron. 2018, 33, 8065–8080. [Google Scholar] [CrossRef]
- Gati, E.; Kampitsis, G.; Manias, S. Variable Frequency Controller for Inductive Power Transfer in Dynamic Conditions. IEEE Trans. Power Electron. 2017, 32, 1684–1696. [Google Scholar] [CrossRef]
- Li, H.; Wang, K.; Fang, J.; Tang, Y. Pulse density modulated ZVS full-bridge converters for wireless power transfer systems. IEEE Trans. Power Electron. 2019, 34, 369–377. [Google Scholar] [CrossRef]
- Xu, L.; Chen, Q.; Ren, X.; Wong, S.; Tse, C.K. Self-oscillating resonant converter with contactless power transfer and integrated current sensing transformer. IEEE Trans. Power Electron. 2017, 32, 4839–4851. [Google Scholar] [CrossRef]
- Namadmalan, A. Self-oscillating tuning loops for series resonant inductive power transfer systems. IEEE Trans. Power Electron. 2016, 31, 7320–7327. [Google Scholar] [CrossRef]
- Chen, Q.; Wong, S.C.; Tse, C.K.; Ruan, X. Analysis, design, and control of a transcutaneous power regulator for artificial hearts. IEEE Trans. Biomed. Circuits Syst. 2009, 3, 23–31. [Google Scholar] [CrossRef]
- Namadmalan, A. Self-Oscillating Pulsewidth Modulation for Inductive Power Transfer Systems. IEEE Trans. Emerg. Sel. Topics Power Electron. 2020, 8, 1813–1820. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, L.; Wang, Y.; Liu, J.; Wu, M.; Ning, G. Analysis, design, and implementation of WPT system for EV’s battery charging based on optimal operation frequency range. IEEE Trans. Power Electron. 2019, 34, 6890–6905. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, J.; Hu, X.; Wang, L.; Wang, Y.; Ning, G. An optimized frequency and phase shift control strategy for constant current charging and zero voltage switching operation in series-series compensated wireless power transmission. IEEE Energy Convers. Congr. Expo. 2017, 961–966. [Google Scholar]
- Li, Y.; Sun, W.; Zhu, X.; Hu, J. A Hybrid Modulation Control for Wireless Power Transfer Systems to Improve Efficiency Under Light-Load Conditions. IEEE Trans. Ind. Electron. 2022, 69, 6870–6880. [Google Scholar] [CrossRef]
- Li, Y.; Liu, S.; Zhu, X.; Hu, J.; Zhang, M.; Mai, R.; He, Z. Extension of ZVS Region of Series–Series WPT Systems by an Auxiliary Variable Inductor for Improving Efficiency. IEEE Trans. Power Electron. 2021, 36, 7513–7525. [Google Scholar] [CrossRef]
- Kavimandan, U.D.; Mahajan, S.M.; Van Neste, C.W. Analysis and Demonstration of a Dynamic ZVS Angle Control Using a Tuning Capacitor in a Wireless Power Transfer System. IEEE Trans. Emerg. Sel. Topics Power Electron. 2021, 9, 1876–1890. [Google Scholar] [CrossRef]
- Ganapathee, M.; Alavandar, S.; Kasinathan, P.; Sowmmiya, U.; Ramachandaramurthy, V.K.; Pachaivannan, N. Evaluation of hybrid controllers for space vector modulation-inverter driven permanent magnet synchronous motor-pump assembly. ISA Trans. 2022, 128, 635–649. [Google Scholar] [CrossRef]
- Zhang, W.; Wong, S.C.; Tse, C.K. Chen. Design for Efficiency Optimization and Voltage Controllability of Series–Series Compensated Inductive Power Transfer Systems. IEEE Trans. Power Electron. 2014, 29, 191–200. [Google Scholar] [CrossRef]
- Li, S.; Li, W.; Deng, J.; Nguyen, T.D.; Mi, C.C. A Double-Sided LCC Compensation Network and Its Tuning Method for Wireless Power Transfer. IEEE Trans. Veh. Technol. 2015, 64, 2261–2273. [Google Scholar] [CrossRef]
- Wang, C.-S.; Covic, G.A.; Stielau, O.H. Power transfer capability and bifurcation phenomena of loosely coupled inductive power transfer systems. IEEE Trans. Ind. Electron. 2004, 51, 148–157. [Google Scholar] [CrossRef]
- Youssef, M.Z.; Pinheiro, H.; Jain, P.K. Self-sustained phase-shift modulated resonant converters: Modeling, design, and performance. IEEE Trans. Power Electron. 2006, 21, 401–414. [Google Scholar] [CrossRef]
- Youssef, M.Z.; Jain, P.K. Series–parallel resonant converter in self-sustained oscillation mode with the high-frequency transformer- leakage-inductance effect: Analysis, modeling, and design. IEEE Trans. Ind. Electron. 2007, 54, 1329–1341. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Symbol | Value |
|---|---|---|
| Input voltage Vin | Vin_min − Vin_max | 360–440 V |
| Output voltage Vout | Vout_min − Vout_max | 250–400 V |
| Maximum output power | Po_max | 1.6 kW |
| Air gap | d | 10–15 cm |
| Maximum coil diameter | Dout | 30 cm |
| Load resistance | RL | 62.5–800 Ω |
| Parameters | Symbol | Value |
|---|---|---|
| Primary coil inductor | Lp | 239.7 μH |
| Primary compensation capacitor | Cp | 18.7 nF |
| Secondary coil inductor | Ls | 332.1 μH |
| Secondary compensation capacitor | Cs | 13.5 nF |
| Coupling coefficient | k | 0.2–0.3 |
| Power MOSFETs | S1–S4 | FCH76N60NF |
| Rectifier diodes | D1–D4 | DSEI120-06A |
| Control Strategy | Input Voltage | Maximum Power | Battery Voltage | System Efficiency | Output Type | |
|---|---|---|---|---|---|---|
| [28] | PWM-PLL | 30–60 V | 60 W | 24 V | 87.8% | CV |
| [29] | SOS PS-PWM | 50 V | 220 W | 50 V | 88% | CV |
| [31] | VF-PS | 80 V | 288 W | 32–72 V | 94.9% | CC-CV |
| [33] | VI-PS | 100 V | 170 W | 72 V | 92% | CV |
| [34] | SC-PS | 30 V | 10 W | 26 V | 87% | CC-CV |
| This work | SO-PS | 360–440 V | 1.6 kW | 250–400 V | 96.7% | CC-CV |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, L.; Wang, X.; Lee, C.-K. A Study and Implementation of Inductive Power Transfer System Using Hybrid Control Strategy for CC-CV Battery Charging. Sustainability 2023, 15, 3606. https://doi.org/10.3390/su15043606
He L, Wang X, Lee C-K. A Study and Implementation of Inductive Power Transfer System Using Hybrid Control Strategy for CC-CV Battery Charging. Sustainability. 2023; 15(4):3606. https://doi.org/10.3390/su15043606
Chicago/Turabian StyleHe, Liangxi, Xiaoqiang Wang, and Chi-Kwan Lee. 2023. "A Study and Implementation of Inductive Power Transfer System Using Hybrid Control Strategy for CC-CV Battery Charging" Sustainability 15, no. 4: 3606. https://doi.org/10.3390/su15043606