
An Effective Precision Afforestation System for UAV
Abstract
:1. Introduction
2. Principles and Methods
2.1. Design Principles of Unmanned Aerial Vehicle Seeding System
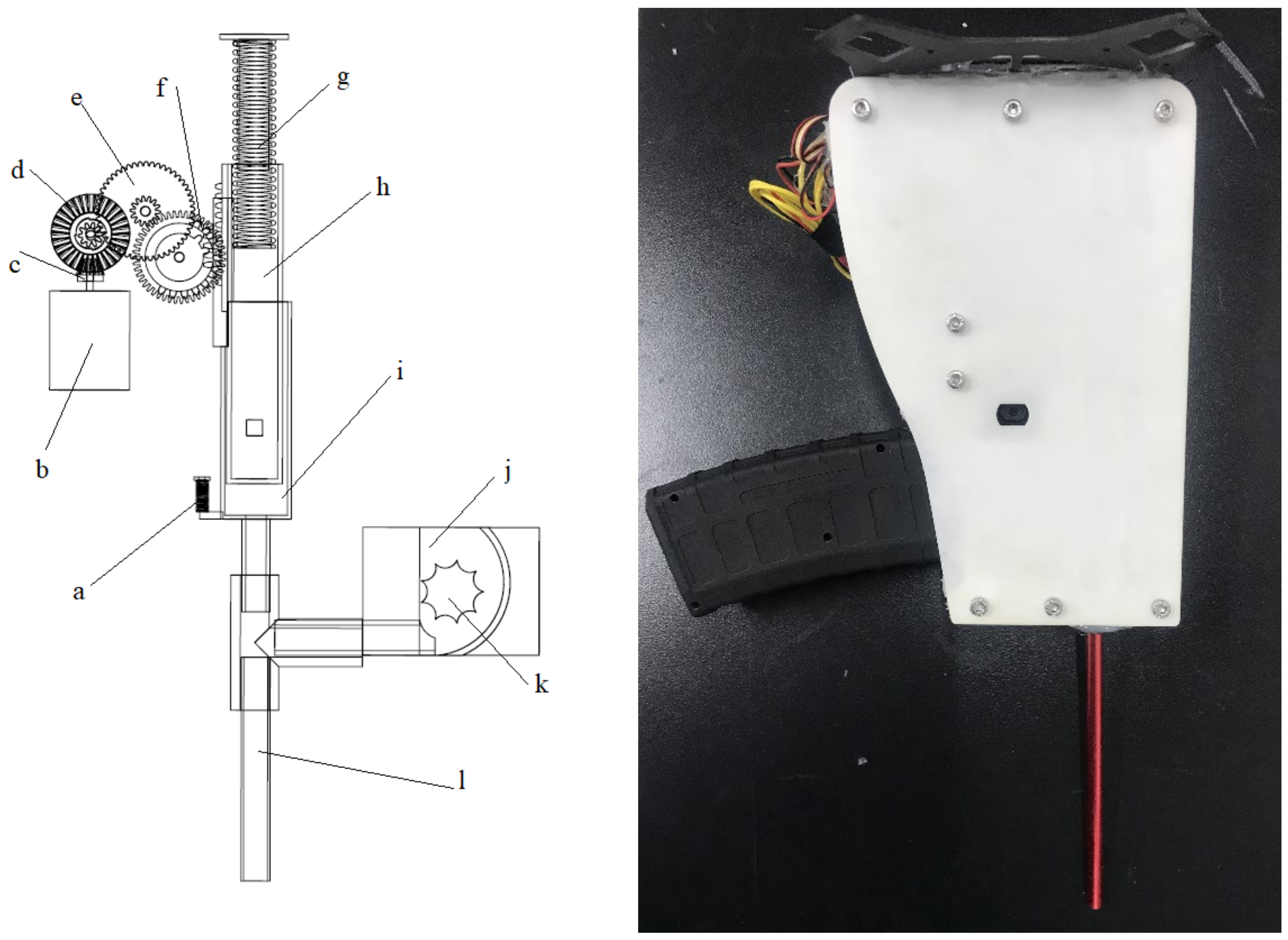
2.2. Development of the Seeding Device
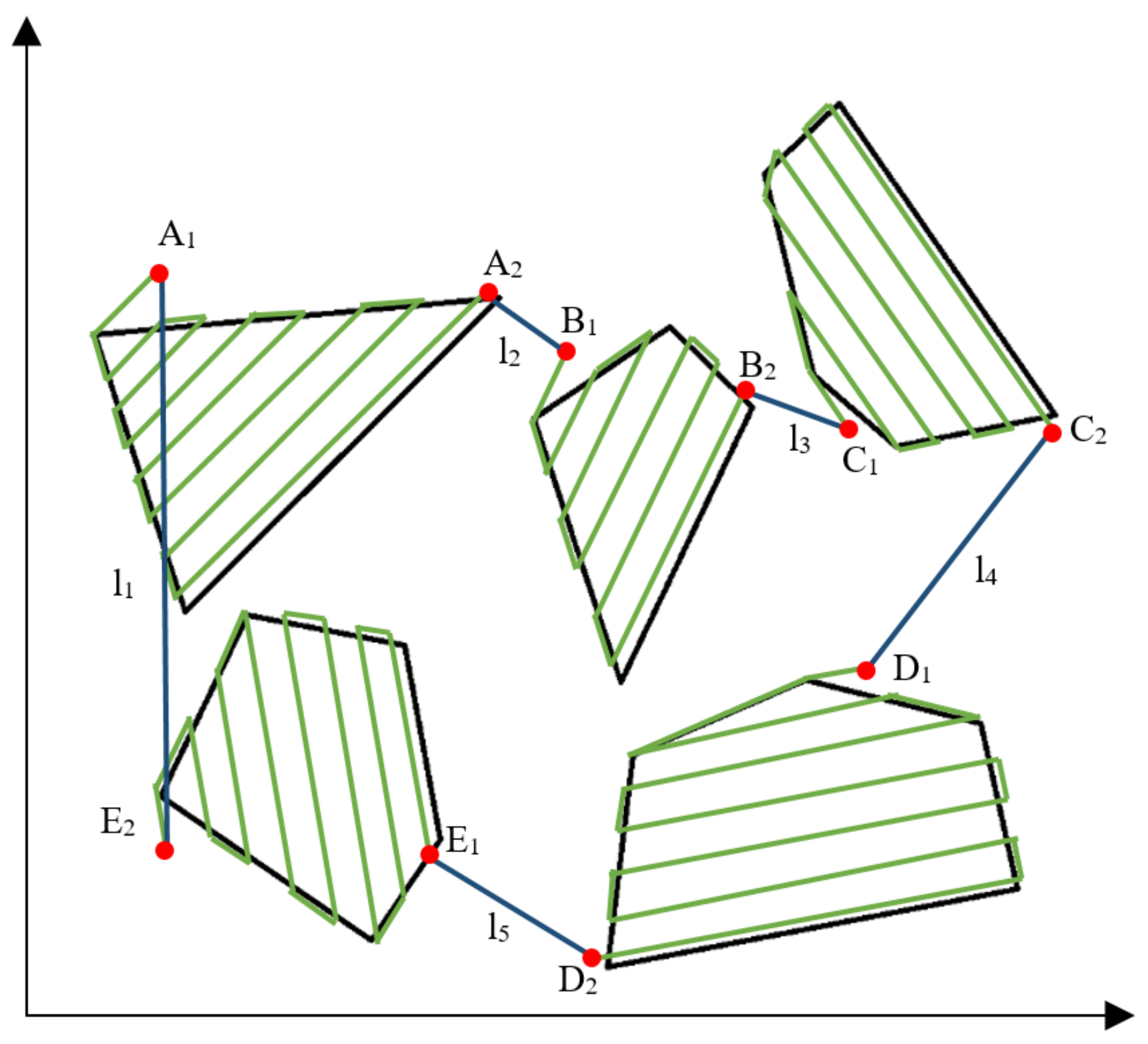
2.3. UAV Seeding Route Planning
2.4. Description of the Test Area
2.5. Experimental Test Gradient
3. Field Experiment and Results
3.1. Sowing Depth Test
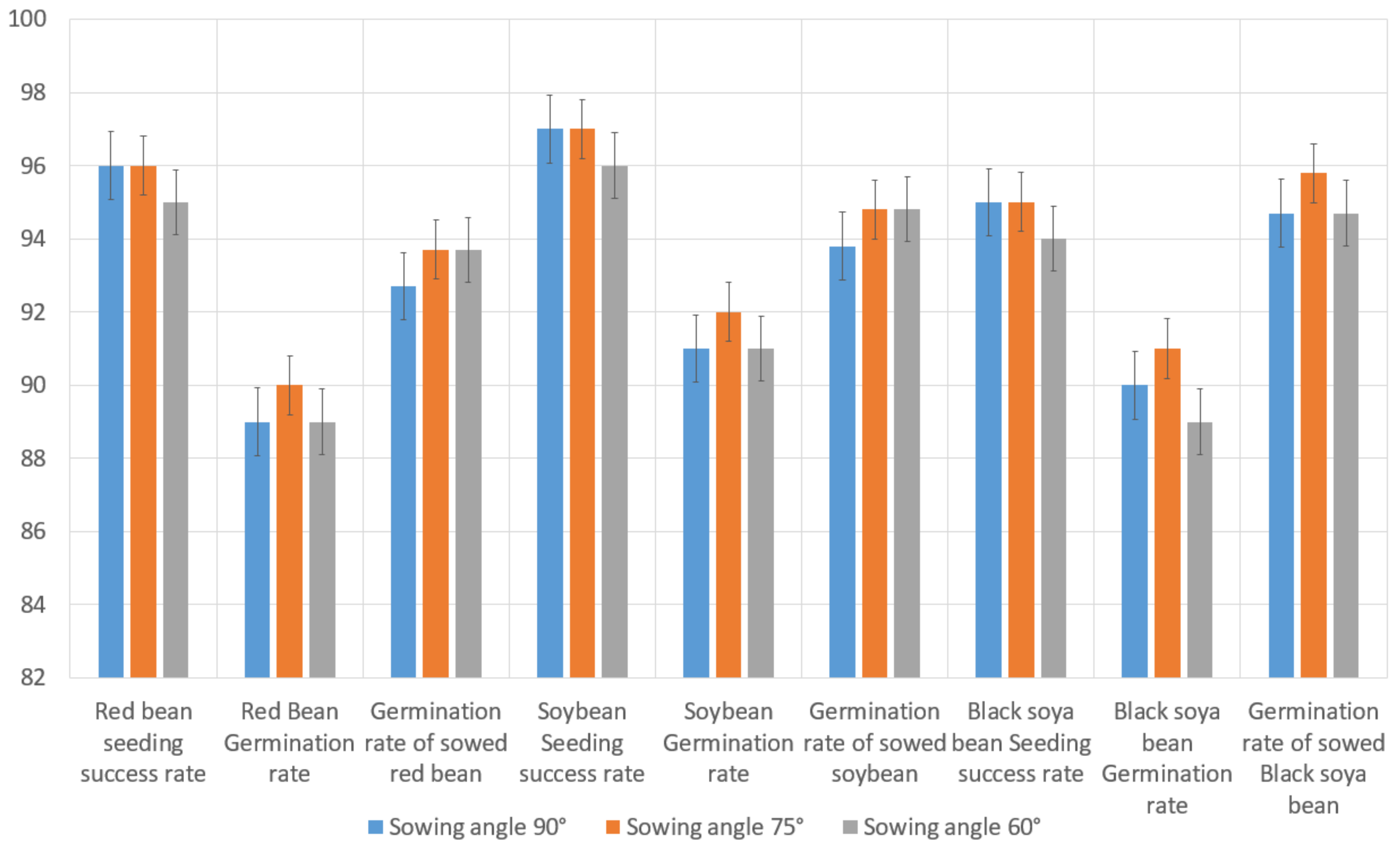
3.2. Seed-Metering Test
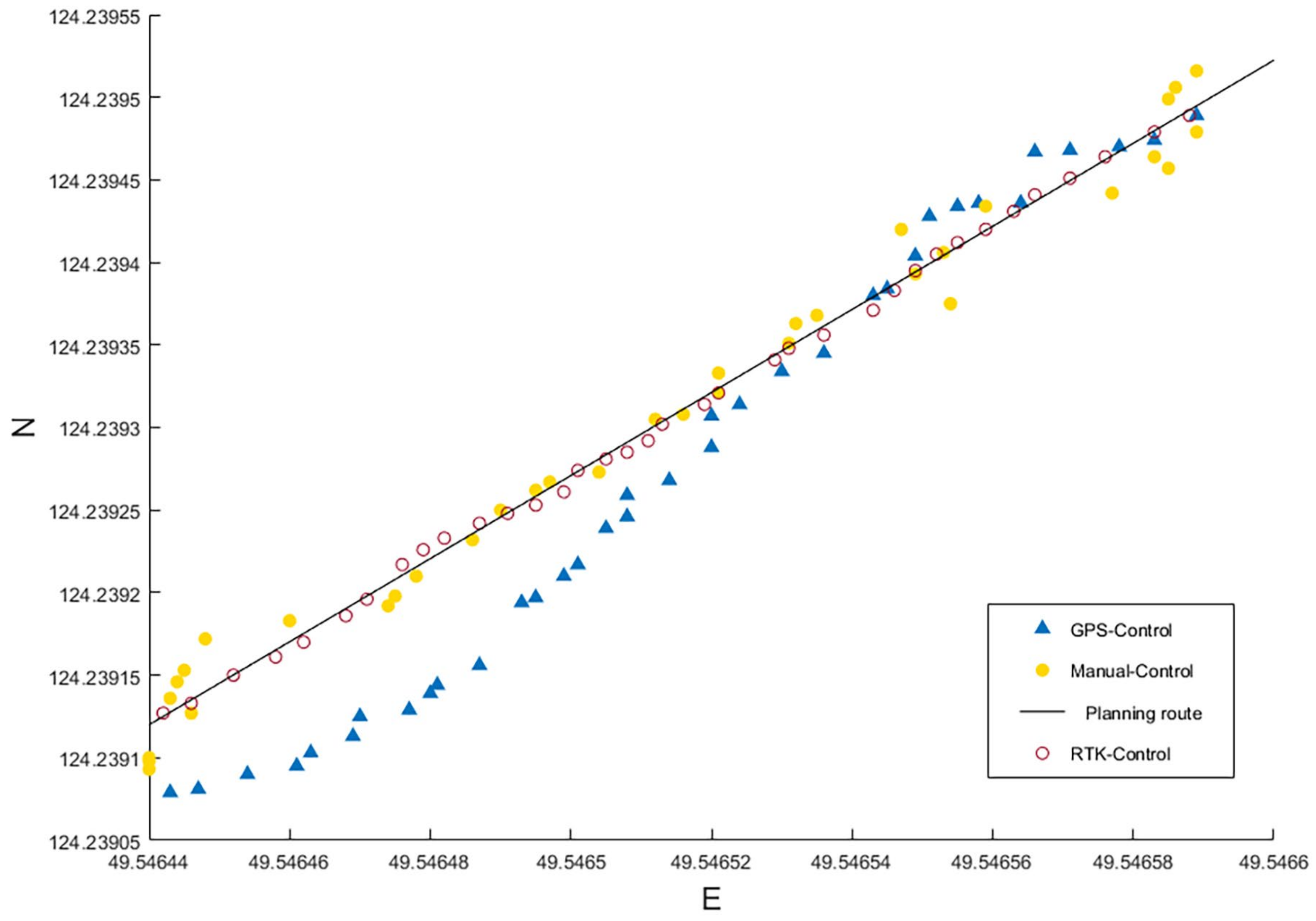
3.3. Afforestation Positioning Accuracy Test
4. Discussion
5. Conclusions
- The UAV seeding equipment studied in this paper can stably and effectively sow seeds into the soil. The stability of a given sowing depth is related to the content of sand and gravel in the soil. It is difficult to sow in sandy loam soil with a high sand content. Accordingly, the sowing qualification index of the soil with a small sand content was higher, and the sowing depth was greater;
- The UAV seeding equipment had good stability, a low missed seeding index, and a well qualified index;
- For some seeds, the precision of seed position sown by the UAV can meet the practical requirements of sowing operations;
- The precision afforestation system of the UAV can accurately and effectively adjust and control the speed of seed launching. The system enables precise control of the sowing depth to ensure a suitable seed position for a variety of agricultural and forestry crops.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Schäfer-Landefeld, L.A.; Brandhuber, R.; Fenner, S.; Koch, H.J.; Stockfisch, N. Effects of agricultural machinery with high axle load on soil properties of normally managed fields. Soil Tillage Res. 2004, 75, 75–86. [Google Scholar] [CrossRef]
- Flower, K.C.; Crabtree, W.L. Soil ph change after surface application of lime related to the levels of soil disturbance caused by no-tillage seeding machinery. Field Crops Res. 2011, 121, 75–87. [Google Scholar] [CrossRef]
- Townsend, J.S.; Chinsuwan, W.; Bethge, J.M.; Stobbe, E.H. Zero-tillage seeding machinery development at the university of manitoba. Soil Tillage Res. 1986, 8, 374. [Google Scholar] [CrossRef]
- Bochtis, D.D.; Sørensen, C.G.C.; Busato, P. Advances in agricultural machinery management: A review. Biosyst. Eng. 2014, 126, 69–81. [Google Scholar] [CrossRef]
- Augello, A.; Gaglio, S.; Lo Re, G.; Peri, D. Time-Constrained Node Visit Planning for Collaborative UAV–WSN Distributed Applications. Sensors 2022, 22, 5298. [Google Scholar] [CrossRef]
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAV monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Hadjichristodoulou, A.; Della, A.; Photiades, J. Effect of sowing depth on plant establishment, tillering capacity and other agronomic characters of cereals. J. Agric. Sci. 1977, 89, 161–167. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision uav estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar] [CrossRef] [Green Version]
- Chianucci, F.; Disperati, L.; Guzzi, D.; Bianchini, D.; Nardino, V.; Lastri, C.; Rindinella, A.; Corona, P. Estimation of canopy attributes in beech forests using true colour digital images from a small fixed-wing UAV. Int. J. Appl. Earth Obs. Geoinf. 2016, 47, 60–68. [Google Scholar] [CrossRef] [Green Version]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicle Forest Remote Sensing—A Systematic Review. Part I: A General Framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicles Forest Remote Sensing—A Systematic Review. Part II: Research Applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Peña-Barragán, J.M.; López-Granados, F.; Jurado-Expósito, M.; García-Torres, L. Sunflower yield related to multi-temporal aerial photography, land elevation and weed infestation. Precis. Agric. 2010, 11, 568–585. [Google Scholar] [CrossRef] [Green Version]
- Vauhkonen, J.; Holopainen, M.; Kankare, V.; Vastaranta, M.; Viitala, R. Geometrically explicit description of forest canopy based on 3d triangulations of airborne laser scanning data. Remote Sens. Environ. 2016, 173, 248–257. [Google Scholar] [CrossRef]
- Chen, S.; McDermid, G.J.; Castilla, G.; Linke, J. Measuring Vegetation Height in Linear Disturbances in the Boreal Forest with UAV Photogrammetry. Remote Sens. 2017, 9, 1257. [Google Scholar] [CrossRef] [Green Version]
- Hyyppä, E.; Hyyppä, J.; Hakala, T.; Kukko, A.; Wulder, M.A.; White, J.C.; Pyörälä, J.; Yu, X.; Wang, Y.; Virtanen, J.P.; et al. Under-canopy UAV laser scanning for accurate forest field measurements. ISPRS J. Photogramm. Remote Sens. 2020, 164, 41–60. [Google Scholar] [CrossRef]
- Vanegas, F.; Bratanov, D.; Powell, K.; Weiss, J.; Gonzalez, F. A novel methodology for improving plant pest surveillance in vineyards and crops using uav-based hyperspectral and spatial data. Sensors 2018, 18, 260. [Google Scholar] [CrossRef] [Green Version]
- Szalay, K.D.; Deákvári, J.; Csorba, Á.; Milics, G.; Fenyvesi, L. Remote sensing applications to improve evaluation methods of various plant and soil parameters and efficiency of pest control. J. Phys. Chem. B 2013, 114, 13861–13865. [Google Scholar]
- Cardil, A.; Otsu, K.; Pla, M.; Silva, C.A.; Brotons, L. Quantifying pine processionary moth defoliation in a pine-oak mixed forest using unmanned aerial systems and multispectral imagery. PLoS ONE 2019, 14, 1–19. [Google Scholar] [CrossRef] [Green Version]
- Näsi, R.; Honkavaara, E.; Blomqvist, M.; Lyytikäinen-Saarenmaa, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Holopainen, M. Remote sensing of bark beetle damage in urban forests at individual tree level using a novel hyperspectral camera from UAV and aircraft. Urban For. Urban Green. 2018, 30, 72–83. [Google Scholar] [CrossRef]
- Klouček, T.; Komárek, J.; Surový, P.; Hrach, K.; Janata, P.; Vašíček, B. The Use of UAV Mounted Sensors for Precise Detection of Bark Beetle Infestation. Remote Sens. 2019, 11, 1561. [Google Scholar] [CrossRef] [Green Version]
- Safonova, A.; Tabik, S.; Alcaraz-Segura, D.; Rubtsov, A.; Maglinets, Y.; Herrera, F. Detection of Fir Trees (Abies sibirica) Damaged by the Bark Beetle in Unmanned Aerial Vehicle Images with Deep Learning. Remote Sens. 2019, 11, 643. [Google Scholar] [CrossRef]
- Patel, N.R.; Bhattacharjee, B.; Mohammed, A.J.; Tanupriya, B.; Saha, S.K. Remote sensing of regional yield assessment of wheat in haryana, india. Int. J. Remote Sens. 2006, 27, 4071–4090. [Google Scholar] [CrossRef]
- Chen, H.; Liang, Z.; Liu, Y.; Liang, Q.; Xie, S. Integrated remote sensing imagery and two-dimensional hydraulic modeling approach for impact evaluation of flood on crop yields. J. Hydrol. 2017, 553, 262–275. [Google Scholar] [CrossRef] [Green Version]
- Faiçal, B.S.; Pessin, G.; Filho, G.P.R.; Carvalho, A.C.P.L.F.; Gomes, P.H.; Ueyama, J. Fine-tuning of uav control rules for spraying pesticides on crop fields: An approach for dynamic environments. Int. J. Artif. Intell. Tools 2016, 25, 1660003. [Google Scholar] [CrossRef] [Green Version]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the potential of images from unmanned aerial vehicles (uav) to support herbicide patch spraying in maize. Precis. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- Williams, J.; Jackson, T.D.; Schönlieb, C.-B.; Swinfield, T.; Irawan, B.; Achmad, E.; Zudhi, M.; Habibi, H.; Gemita, E.; Coomes, D.A. Monitoring early-successional trees for tropical forest restoration using low-cost UAV-based species classification. Front. For. Glob. Chang. 2022, 5, 876448. [Google Scholar] [CrossRef]
- Moura, M.M.; de Oliveira, L.E.S.; Sanquetta, C.R.; Bastos, A.; Mohan, M.; Corte, A.P.D. Towards Amazon Forest Restoration: Automatic Detection of Species from UAV Imagery. Remote Sens. 2021, 13, 2627. [Google Scholar] [CrossRef]
- Gobbi, B.; Van Rompaey, A.; Loto, D.; Gasparri, I.; Vanacker, V. Comparing Forest Structural Attributes Derived from UAV-Based Point Clouds with Conventional Forest Inventories in the Dry Chaco. Remote Sens. 2020, 12, 4005. [Google Scholar] [CrossRef]
- Cao, L.; Liu, H.; Fu, X.; Zhang, Z.; Shen, X.; Ruan, H. Comparison of UAV LiDAR and Digital Aerial Photogrammetry Point Clouds for Estimating Forest Structural Attributes in Subtropical Planted Forests. Forests 2019, 10, 145. [Google Scholar] [CrossRef] [Green Version]
- Surový, P.; Ribeiro, N.A.; Panagiotidis, D. Estimation of positions and heights from UAV-sensed imagery in tree plantations in agrosilvopastoral systems. Int. J. Remote Sens. 2018, 39, 4786–4800. [Google Scholar] [CrossRef]
- Panagiotidis, I.; Abdollahnejad, A.; Slavík, M. 3D point cloud fusion from UAV and TLS to assess temperate managed forest structures. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102917. [Google Scholar] [CrossRef]
- Mohan, M.; Richardson, G.; Gopan, G.; Aghai, M.M.; Bajaj, S.; Galgamuwa, G.A.P.; Vastaranta, M.; Arachchige, P.S.P.; Amorós, L.; Corte, A.P.D.; et al. UAV-Supported Forest Regeneration: Current Trends, Challenges and Implications. Remote Sens. 2021, 13, 2596. [Google Scholar] [CrossRef]
- De Rango, F.; Palmieri, N.; Santamaria, A.F.; Potrino, G. A simulator for UAVs management in agriculture domain. Simul. Ser. 2017, 49, 149–156. [Google Scholar]
- Surovỳ, P.; Kuželka, K. Acquisition of forest attributes for decision support at the forest enterprise level using remote-sensing techniques—A review. Forests 2019, 10, 273. [Google Scholar] [CrossRef] [Green Version]
- Lysych, M.; Bukhtoyarov, L.; Druchinin, D. Design and Research Sowing Devices for Aerial Sowing of Forest Seeds with UAVs. Inventions 2021, 6, 83. [Google Scholar] [CrossRef]
- Castro, J.; Morales-Rueda, F.; Navarro, F.B.; Löf, M.; Vacchiano, G.; Alcaraz-Segura, D. Precision restoration: A necessary approach to foster forest recovery in the 21st century. Restor. Ecol. 2021, 29, e13421. [Google Scholar] [CrossRef]
- Greipsson, S. Large-scale reclamation of barren lands in ice land by aerial seeding. Land Degrad. Dev. 2015, 10, 185–193. [Google Scholar] [CrossRef]
- Cancan, S.; Zhiyan, Z.; Rui, J.; Xiwen, L.; Xingang, H.; Rui, M.; Engineering, C.O. Design and parameter optimization of pneumatic rice sowing device for unmanned aerial vehicle. Trans. Chin. Soc. Agric. Eng. 2018, 34, 80–88. [Google Scholar]
- Wang, H.; Yu, S.; Liao, J.; Qing, X.; Sun, D.; Ji, F.; Song, W.; Wang, L.; Li, T. A Robot Platform for Highly Efficient Pollutant Purification. Front. Bioeng. Biotechnol. 2022, 10, 903219. [Google Scholar]
- Precision Forestry. Available online: https://www.droneseed.co/ (accessed on 12 December 2018).
- BioCarbon Engineering. Available online: https://www.biocarbonengineering.com/ (accessed on 12 December 2018).
- Castro, J.; Morales-Rueda, F.; Alcaraz-Segura, D.; Tabik, S. Forest restoration is more than firing seeds from a drone. Restor. Ecol. 2022, 31, e13736. [Google Scholar] [CrossRef]
- Rice, C.R.; McDonald, S.T.; Shi, Y.; Gan, H.; Lee, W.S.; Chen, Y.; Wang, Z. Perception, Path Planning, and Flight Control for a Drone-Enabled Autonomous Pollination System. Robotics 2022, 11, 144. [Google Scholar] [CrossRef]
- Novikov, A.I.; Ersson, B.T. Aerial seeding of forests in Russia: A selected literature analysis. IOP Conf. Ser. Earth Environ. Sci. 2018, 226, 012051. [Google Scholar] [CrossRef]
- Andrio, A. Development of UAV technology in seed dropping for aerial revegetation practices in Indonesia. IOP Conf. Ser. Earth Environ. Sci. 2019, 308, 012051. [Google Scholar] [CrossRef] [Green Version]
- Vovchenko, N.; Novikov, A.; Sokolov, S.; Tishchenko, E. A proposed technology to ensure high-precision aerial seeding of certified seeds. IOP Conf. Ser. Earth Environ. Sci. 2020, 595, 012066. [Google Scholar] [CrossRef]
- Olenin, O.A.; Zudilin, S.N.; Tsarkov, A.V. Development of a Russian pendant seeder-spreader for a multicopter in the conditions of import substitution. IOP Conf. Ser. Earth Environ. Sci. 2021, 954, 012054. [Google Scholar] [CrossRef]
- Marín, C.; Weiner, J. Effects of density and sowing pattern on weed suppression and grain yield in three varieties of maize under high weed pressure. Weed Res. 2015, 54, 467–474. [Google Scholar] [CrossRef]
- Burton, C.M.; Burton, P.J.; Hebda, R.; Turner, N.J. Determining the optimal sowing density for a mixture of native plants used to revegetate degraded ecosystems. Restor. Ecol. 2010, 14, 379–390. [Google Scholar] [CrossRef]
- Kirby, E.J.M. The effect of sowing date and plant density on barley. Ann. Appl. Biol. 2010, 63, 513–521. [Google Scholar] [CrossRef]
- Hecht, V.L.; Temperton, V.M.; Nagel, K.A.; Rascher, U.; Postma, J.A. Sowing density: A neglected factor fundamentally affecting root distribution and biomass allocation of field grown spring barley (Hordeum Vulgare L.). Front. Plant Sci. 2016, 7, 944. [Google Scholar] [CrossRef] [Green Version]
- Ren, Y.; Liu, J.; Wang, Z.; Zhang, S. Planting density and sowing proportions of maize–soybean intercrops affected competitive interactions and water-use efficiencies on the loess plateau, China. Eur. J. Agron. 2016, 72, 70–79. [Google Scholar] [CrossRef]
- Ma, Q.; Han, W.; Huang, S.; Dong, S.; Li, G.; Chen, H. Distinguishing Planting Structures of Different Complexity from UAV Multispectral Images. Sensors 2021, 21, 1994. [Google Scholar] [CrossRef]
- Yatskul, A.; Lemiere, J.P. Establishing the conveying parameters required for the air-seeders. Biosyst. Eng. 2018, 166, 1–12. [Google Scholar] [CrossRef]
- Shafi, M.; Bakht, J.; Ali, S.; Khan, H.; Khan, M.A.; Sharif, M. Effect of planting density on phenology, growth and yield of maize (Zea Mays L.). Pak. J. Bot. 2012, 44, 691–696. [Google Scholar]
- Adipala, E.; Takan, J.P.; Ogenga-Latigo, M.W. Effect of planting density of maize on the progress and spread of northern leaf blight from exserohilum turcicum infested residue source. Eur. J. Plant Pathol. 1995, 101, 25–33. [Google Scholar] [CrossRef]
- Brown, P.R.; Singleton, G.R.; Tann, C.R.; Mock, I. Increasing sowing depth to reduce mouse damage to winter crops. Crop Prot. 2003, 22, 653–660. [Google Scholar] [CrossRef]
- Photiades, I.; Hadjichristodoulou, A. Sowing date, sowing depth, seed rate and row spacing of wheat and barley under dryland conditions. Field Crops Res. 1984, 9, 151–162. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UAV Seeding System Content | Hardware Configuration | Remarks |
|---|---|---|
| Support and Appearance | 8-rotor S1000 UAV frame produced by DJI Company (China) | Symmetrical motor wheelbase 1045 mm |
| Dynamic System | High-speed Electro-Tuning 4114pro Motor | Electricity: 40A Number: 8 |
| Flight Control System | XAG SUPERX2 RTK | |
| Seeding Device | One Microcontroller Unit and four circuits Two motors, two cylinders, a launching tube, a seed storage bin | Electronic control part Mechanical device |
| Sensor | Ranging Radar | The maximum range: 30 m. |
| Video Surveillance System | high-definition camera DJI Lightbridge image transmission | Pixel: 16 megapixels HD: 2.4 G |
| UAV Parameters | Flight Parameters | ||
|---|---|---|---|
| Single arm length | 386 mm | Take-off weight | 6.0~11.0 kg |
| Center frame diameter | 337 mm | Battery power | 16,000 mAh |
| Center frame weight | 1520 g | Maximum power | 4000 W |
| Landing gear size | 660 mm L × 511 mm W × 305 mm H | Hovering power | 1500 W (take-off weight 9.5 kg) |
| Motor KV value | 400 rpm/V | Hover time 15 min | 15 min (take-off weight 9.5 kg) |
| Working voltage | 6S LiPo (22.2 V) | Working environment | −10~+40 °C |
| Number | Seeding Speed r/min | Missed Seeding Index/% | Conformity Index/% |
|---|---|---|---|
| 1 | 30 | 1.0 | 97.0 |
| 2 | 30 | 2.0 | 96.0 |
| 3 | 30 | 1.0 | 97.0 |
| 4 | 60 | 1.5 | 97.5 |
| 5 | 60 | 2.0 | 96.5 |
| 6 | 60 | 1.0 | 98.0 |
| 7 | 90 | 2.7 | 96.5 |
| 8 | 90 | 2.7 | 96.0 |
| 9 | 90 | 3.0 | 96.0 |
| 10 | 120–125 | 3.5 | 95.7 |
| 11 | 120–125 | 2.8 | 96.5 |
| 12 | 120–125 | 3.5 | 95.5 |
| 13 | 150–155 | 6.2 | 92.4 |
| 14 | 150–155 | 5.2 | 93.2 |
| 15 | 150–155 | 5.4 | 93.6 |
| 16 | 180–185 | 9.3 | 89.3 |
| 17 | 180–185 | 9.6 | 88.2 |
| 18 | 180–185 | 10.3 | 87.3 |
| 19 | 240–250 | 15.1 | 83.8 |
| 20 | 240–250 | 16.7 | 81.1 |
| 21 | 240–250 | 16.9 | 81.2 |
| 22 | 270–300 | 25.6 | 73.3 |
| 23 | 270–300 | 19.5 | 78.3 |
| 24 | 270–300 | 26.1 | 72.7 |
| Number | East Longitude/° | North Latitude/° | Average Error/cm | Variance/cm2 |
|---|---|---|---|---|
| 1 | 124.239803 | 49.546697 | 7.2 | 1.75 |
| 2 | 124.239917 | 49.546744 | 7.7 | 4.12 |
| 3 | 124.240041 | 49.546790 | 8.3 | 2.76 |
| 4 | 124.240164 | 49.546836 | 8.6 | 1.46 |
| 5 | 124.240300 | 49.546881 | 6.7 | 3.07 |
| Average | 7.7 | 3.23 |
| Number | Spring Type/mm | Launch Tube Length/mm | Maximum Depth/cm | Average Depth/cm |
|---|---|---|---|---|
| 1 | 1.2 × 15 × 150 | 250 | 3.5 | 2.1 |
| 2 | 1.6 × 15 × 150 | 250 | 4.4 | 3.1 |
| 3 | 2.0 × 15 × 150 | 250 | 6.5 | 4.1 |
| 4 | 1.6 × 15 × 150 | 150 | 3.8 | 2.5 |
| 5 | 1.6 × 15 × 150 | 350 | 5.1 | 3.4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, H.; Chen, Z.; Wang, Z.; Li, J. An Effective Precision Afforestation System for UAV. Sustainability 2023, 15, 2212. https://doi.org/10.3390/su15032212
Liu H, Chen Z, Wang Z, Li J. An Effective Precision Afforestation System for UAV. Sustainability. 2023; 15(3):2212. https://doi.org/10.3390/su15032212
Chicago/Turabian StyleLiu, Haiyang, Zhuo Chen, Zhiliang Wang, and Jian Li. 2023. "An Effective Precision Afforestation System for UAV" Sustainability 15, no. 3: 2212. https://doi.org/10.3390/su15032212