

Effective Placement Strategies for Portable Fishways in Agricultural Drainage Canals: A Numerical Investigation
Abstract
:1. Introduction
2. Materials and Methods
2.1. Portable Fishway
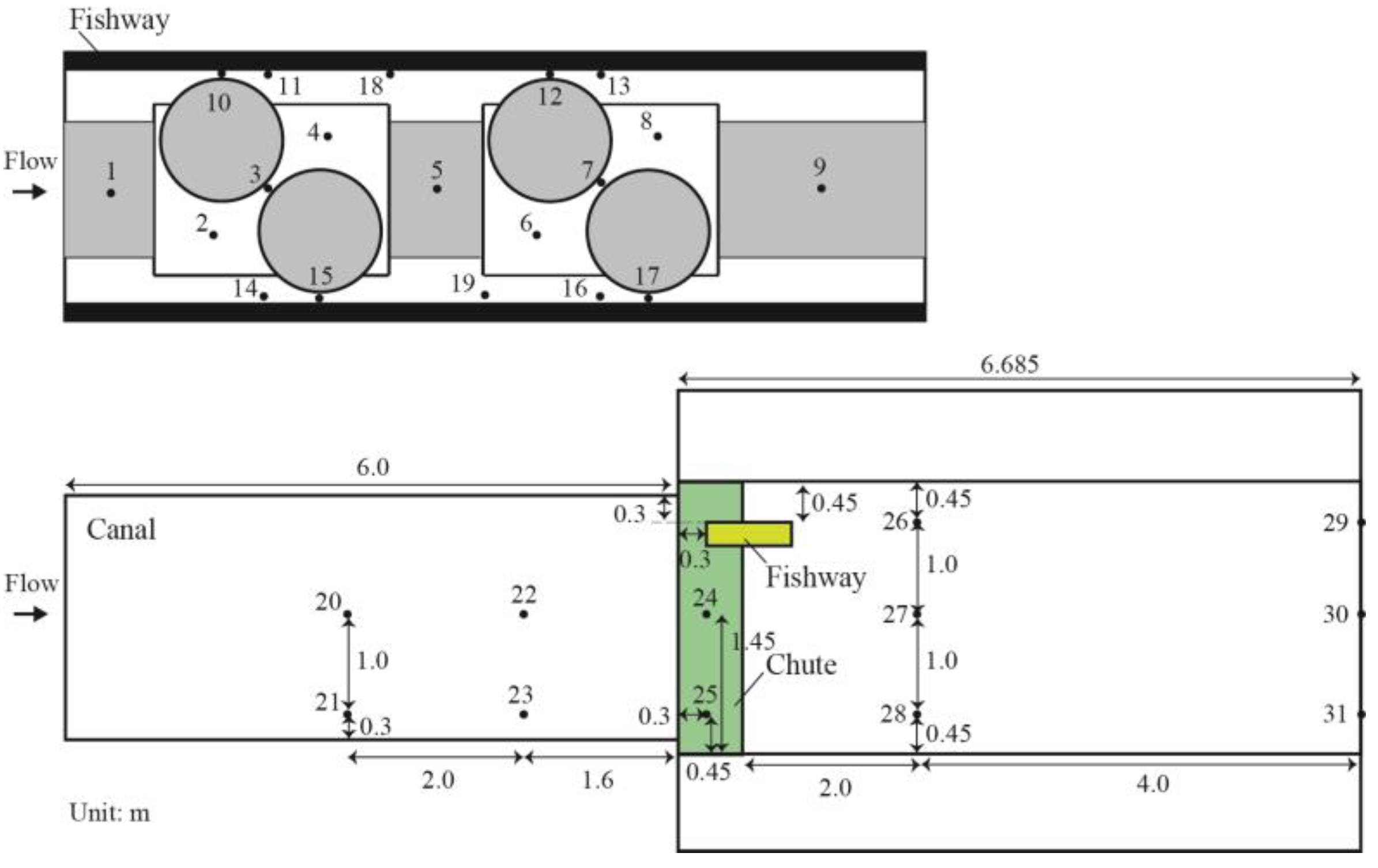
2.2. Study Area
2.3. Field Observations
2.4. Numerical Computation of the Flow in the Canal and Fishway
3. Results
3.1. Fish Capture
3.2. Calibration of the Flow Model
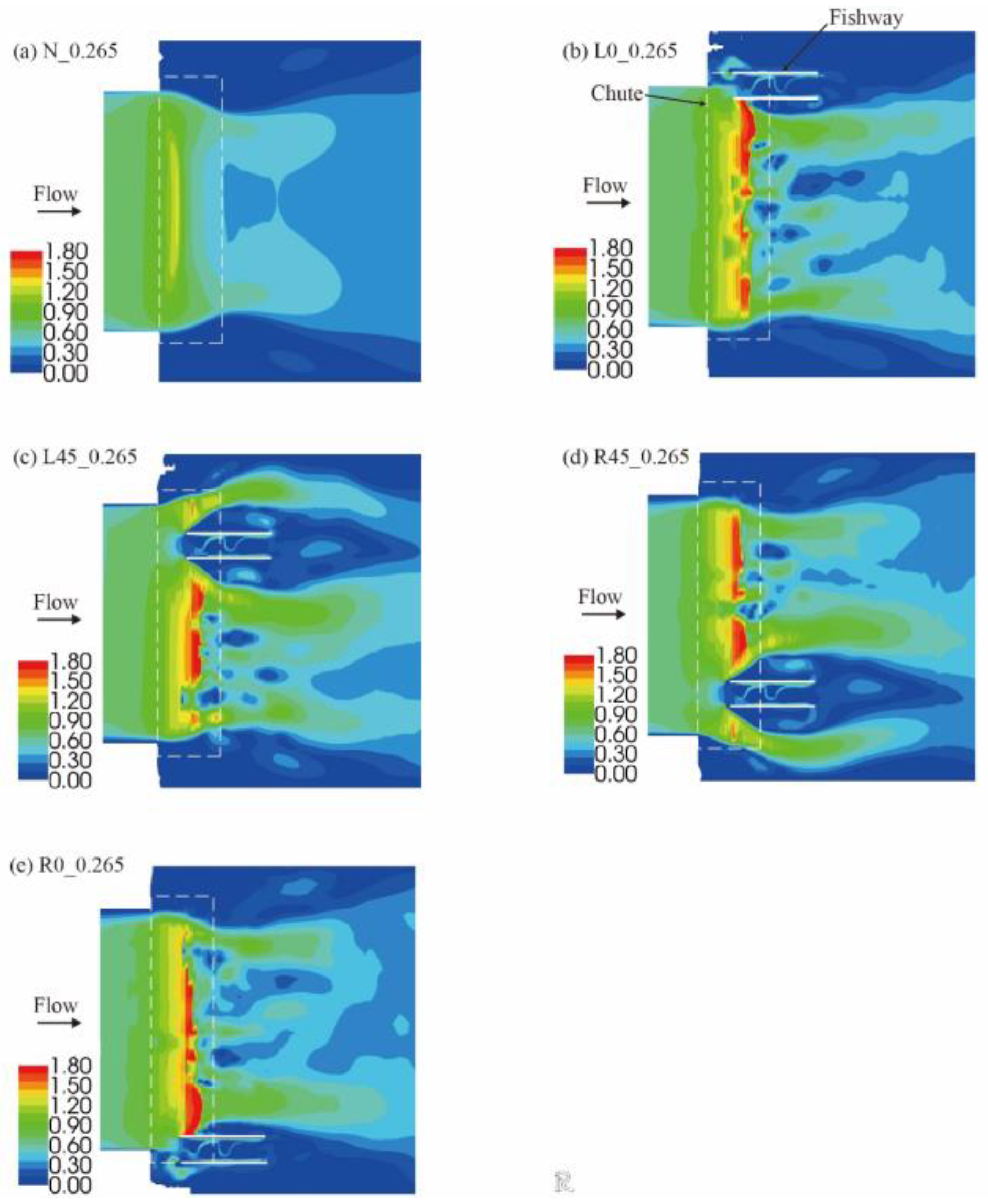
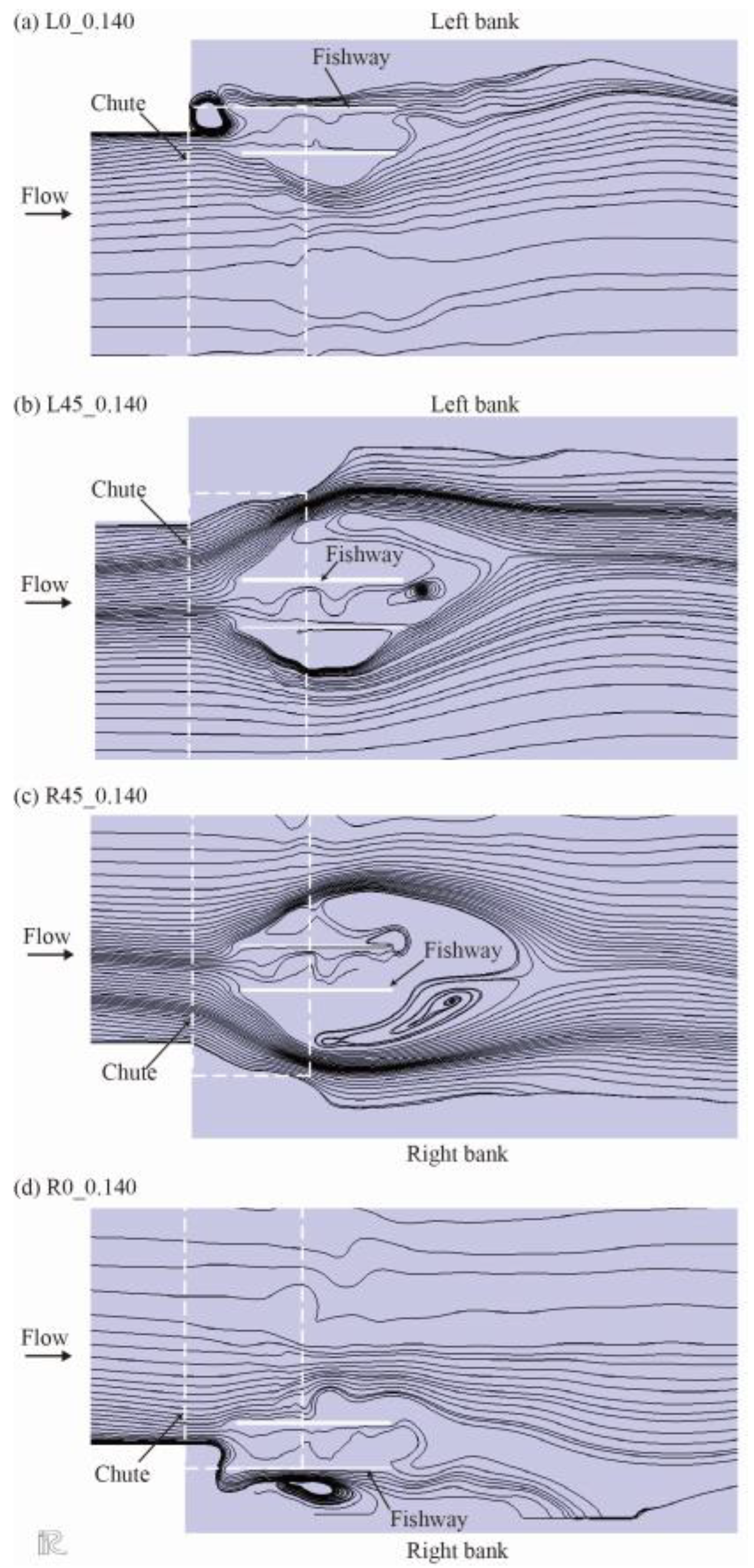
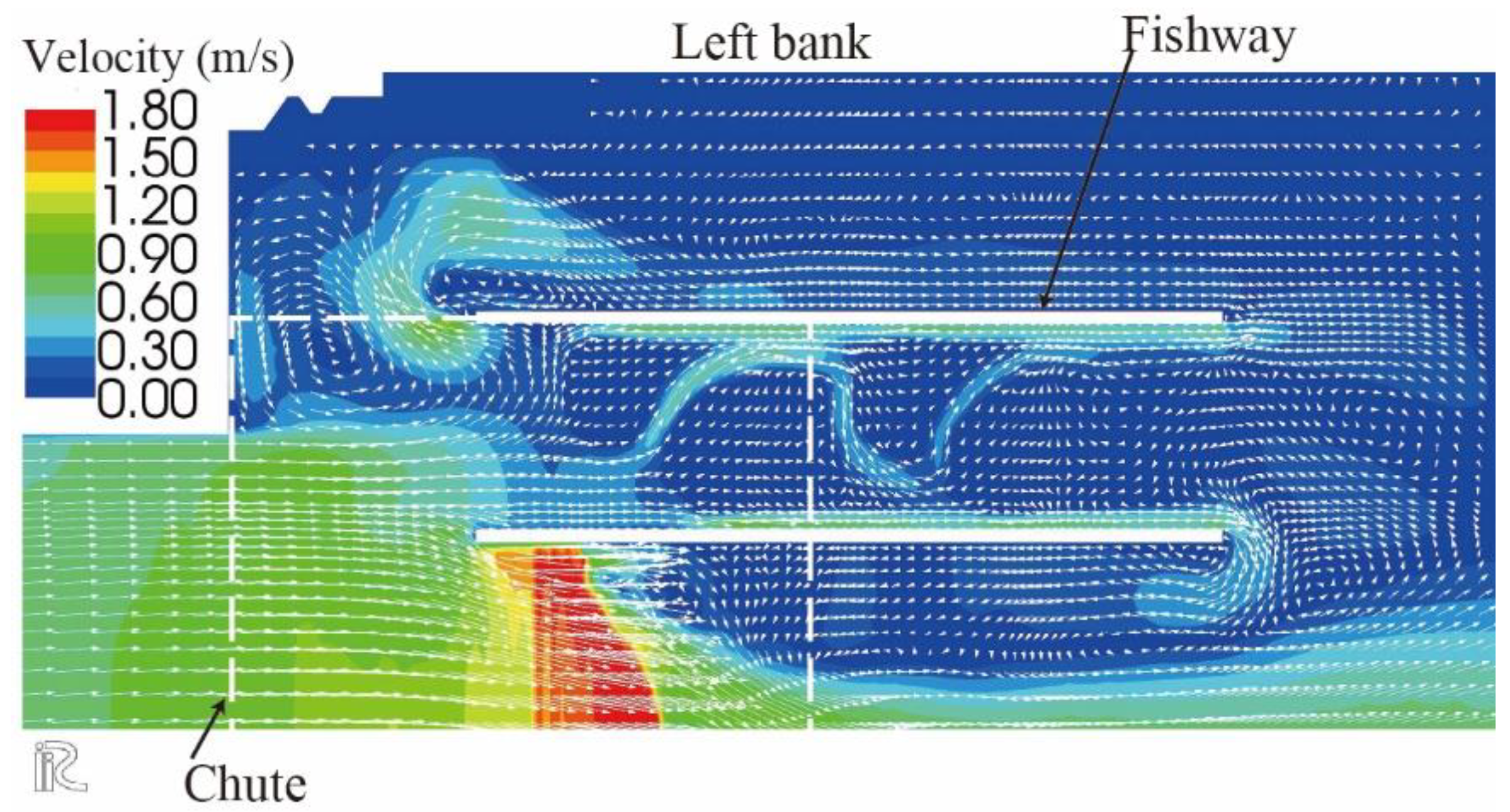
3.3. Effect of Introducing the Portable Fishway to the Chute
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Takahashi, N.; Misawa, Y.; Honzu, M.; Yanagawa, R.; Tagawa, T.; Nakata, K. Proposal of portable fishway system applicable to agricultural waterways. Trans. Jpn. Soc. Irrig. Drain. Rur. Eng. 2021, 89, I_29–I_35. [Google Scholar] [CrossRef]
- Zhong, Z.; Ruan, T.; Hu, Y.; Liu, J.; Liu, B.; Xu, W. Experimental and numerical assessment of hydraulic characteristic of a new semi-frustum weir in the pool-weir fishway. Ecol. Eng. 2021, 170, 106362. [Google Scholar] [CrossRef]
- An, R.; Li, J.; Liang, R.; Tuo, Y. Three-dimensional simulation and experimental study for optimizing a vertical slot fishway. J. Hydro-Environ. Res. 2016, 12, 119–129. [Google Scholar] [CrossRef]
- Gao, Z.; Andersson, H.I.; Dai, H.; Jiang, F.; Zhao, L. A new Eulerian–Lagrangian agent method to model fish paths in a vertical slot fishway. Ecol. Eng. 2016, 88, 217–225. [Google Scholar] [CrossRef]
- Amaral, S.D.; Quaresma, A.L.; Branco, P.; Romão, F.; Katopodis, C.; Ferreira, M.T.; Pinheiro, A.N.; Santos, J.M. Assessment of retrofitted ramped weirs to improve passage of potamodromous fish. Water 2019, 11, 2441. [Google Scholar] [CrossRef]
- Chorda, J.; Cassan, L.; Laurens, P. Modeling steep-slope flow across staggered emergent cylinders: Application to fish passes. J. Hydraul. Eng. 2019, 145, 04019038. [Google Scholar] [CrossRef]
- Sudo, S. Observation of Fish Passage and Flow Analysis in Portable Fishway Located on Chute in Canal. Bachelor’s Thesis, Ibaraki University, Mito, Japan, 2020; pp. 20–24. (In Japanese). [Google Scholar]
- Hosoya, K.; Uchiyama, R.; Fujita, T.; Takeuchi, H.; Kawase, S. Japanese Freshwater Fish; Yama-Kei Publishers: Minato, Japan, 2019; pp. 474–476. (In Japanese) [Google Scholar]
- Nays2DH Development Team. Nays2DH. Solver Manual. IRIC Project. 2011. Available online: https://i-irc.org/en (accessed on 20 October 2023).
- Nelson, J.M.; Shimizu, Y.; Abe, T.; Asahi, K.; Gamou, M.; Inoue, T.; Iwasaki, T.; Kakinuma, T.; Kawamura, S.; Kimura, I.; et al. The international river interface cooperative: Public domain flow and morphodynamics software for education and applications. Adv. Water Resour. 2016, 93, 62–74. [Google Scholar] [CrossRef]
- Yagci, O. Hydraulic aspects of pool-weir fishways as ecologically friendly water structure. Ecol. Eng. 2010, 36, 36–46. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Explanation |
|---|---|
| Measuring direction | Three axes and six directions |
| Flow range | −2 to +2 m/s |
| Accuracy | ±0.010 m/s (velocity range: 0 to ±0.499 m/s), ±0.020 m/s (velocity range: ±0.500 to ±0.999 m/s), ±0.040 m/s (velocity range: ±1.000 to ±2.000 m/s) |
| Noise | Within ±0.005 m/s under hydrostatic condition |
| Response time | 0.5 s |
| Case | Upstream Discharge (m3s−1) | Downstream Water Depth (m) | Position of Fishway | Number of Nodes | Note |
|---|---|---|---|---|---|
| N_0.140 | 0.140 | 0.143 | No fishway | 11,685 (=123 × 95) | |
| N_0.210 | 0.210 | 0.149 | No fishway | 11,685 (=123 × 95) | Validation |
| N_0.265 | 0.265 | 0.187 | No fishway | 11,685 (=123 × 95) | |
| L0_0.140 | 0.140 | 0.143 | On left bank | 50,024 (=338 × 148) | |
| L0_0.265 | 0.265 | Uniform depth | On left bank | 50,024 (=338 × 148) | |
| L45_0.140 | 0.140 | 0.143 | 0.45 m away from left bank | 59,312 (=337 × 176) | Calibration |
| L45_0.265 | 0.265 | Uniform depth | 0.45 m away from left bank | 59,488 (=338 × 176) | |
| R0_0.140 | 0.140 | 0.143 | On right bank | 50,024 (=338 × 148) | |
| R0_0.265 | 0.265 | Uniform depth | On right bank | 50,024 (=338 × 148) | |
| R45_0.140 | 0.140 | 0.143 | 0.45 m away from right bank | 71,136 (=342 × 208) | |
| R45_0.265 | 0.265 | Uniform depth | 0.45 m away from right bank | 71,136 (=342 × 208) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maeda, S.; Yoshida, Y.; Yoshinari, K.; Takahashi, N. Effective Placement Strategies for Portable Fishways in Agricultural Drainage Canals: A Numerical Investigation. Sustainability 2023, 15, 16283. https://doi.org/10.3390/su152316283
Maeda S, Yoshida Y, Yoshinari K, Takahashi N. Effective Placement Strategies for Portable Fishways in Agricultural Drainage Canals: A Numerical Investigation. Sustainability. 2023; 15(23):16283. https://doi.org/10.3390/su152316283
Chicago/Turabian StyleMaeda, Shigeya, Yuri Yoshida, Kanuka Yoshinari, and Naoki Takahashi. 2023. "Effective Placement Strategies for Portable Fishways in Agricultural Drainage Canals: A Numerical Investigation" Sustainability 15, no. 23: 16283. https://doi.org/10.3390/su152316283