1. Introduction
There has been a dramatic increase in China’s automobile industry with the accelerating economic progression in China. As of the year-end of 2021, China’s motor vehicle quantity had amounted to 395 million, of which 302 million were automobiles [
1]. By 2025, according to the prediction of DeLi, China’s car ownership is expected to be the largest globally, exceeding that of the USA. Meanwhile, the amount of automotive shredder residue (ASR) is also experiencing incremental growth. Among the approximately 2 million recycled motor vehicles nationwide, cars amounted to 1.184 million in 2018. Based on the PRC Ministry of Commerce data, among the approximately 2.295 million recycled motor vehicles nationwide in 2019, cars amounted to 1.951 million. During recent years, the national annual scrapping volume has been estimated to be 10–20 million vehicles. It causes waste from end-of-life vehicles (end-of-life vehicles) to increase year by year. Although the domestic ELV industry is booming [
2], ELVs represent a mere 1–1.4% of the scrap volume in overall inventory; according to the 2019 China Automobile Circulation Association data, the recovery rate of vehicles is still in its infancy [
3]. If ELVs are not disposed of properly, they will generate exhaust emissions and energy exhaustion. Faced with the upcoming challenge of a sharp elevation in ELV quantity, the environmentally friendly and sustainable technology for recycling end-of-life vehicles is bound to rise to a practical and constantly researched hot topic [
4,
5].
Due to the complex components of ELVs, the prevailing ELV recovery procedure needs to be involved in car dismantling. After the processes of battery disassembly, Freon and waste oil extraction, tire disassembly, door disassembly, engine disassembly, etc., the car shell enters the crushing center. After crushing, it can be separated into plastic, iron, non-ferrous metals (such as copper and aluminum), etc. [
6]. Major renewable resources consisting of recyclable metals, including Fe, Al, and Pt [
7], occupy 80%. According to the latest estimate by Sverdrup et al. [
8], scrap will be the primary source for Fe, Al, and Cu in the next three decades. Nevertheless, enterprises in China’s auto recycling and dismantling industry are still operating in a relatively crude manner. After the bulk ferrous components from crushed ELVs are removed by the magnetic separator, the non-ferrous metals, such as copper and aluminum, are manually dismantled; this is still mainly adopted for sorting due to the large volume, irregular shape, and randomness of distribution from scrapped vehicles. As the grinding and disassembly technologies progress, attempts have been made by industrial plants to develop advanced equipment for the purpose of separating non-ferrous metals.
ECS is the most environmentally friendly technology for sorting the non-ferrous fraction. Despite the discovery of the eddy current phenomenon more than 100 years ago and the patenting of the eddy current sorter in the United States early in the 1960s, the current equipment is still limited by particle geometry. Through the historical survey of ECS technology, markets still tend to use horizontal rotating belted-drum-type ECS in this industry, most of which are used for the disposal of urban solid waste or mineral processing [
9]. A series of studies have been working on its mechanism and optimization in the last decade. Apart from eddy current force models, the kinematic performance of e-waste-derived particulates of non-ferrous metals during separation has also been summarized [
10]. Most researchers have been inclined to increase the intensity of the magnetic field [
11], the magnetic field frequency [
12], and the torque of the eddy current [
13] to enhance the separation efficiency. Several significant factors influencing the efficiency of ECS were demonstrated: the particle dimension, the particle cross-section in a magnetic field, the magnetic intensity on the roller surface, the magnetic velocity, the magnetic roller radius, the quantities of magnetic poles and rollers, and the feeding speed [
14]. Nevertheless, scarce studies have emphasized sorting non-ferrous metals from crushed vehicles.
Based on the above conclusion, magnetic rollers are the crucial component of belt-driven rotary drum ECS, and ECS’s efficiency of separation is primarily associated with the frequency and intensity of the alternating magnetic field [
15], which depends on the magnetic roller structure and velocity. In earlier periods, magnetic rollers were mainly explored through trial-and-error experiments and numerical simulation due to the high cost of manufacturing magnetic rollers instead of revealing the structural mechanism of the rollers, which is the main factor influencing the efficiency of separation. Previous studies by Merahi et al. and Amir et al. studied how the magnetic rollers’ angle of mechanical rotation [
16] and pairs of magnet poles [
17] influence the eddy current density and induce a voltage in the conductive structure using FEA software. ANSYS Maxwell 19.2 was also used to clarify how the magnetic thickness affected the force of repulsion [
18]. Therefore, distribution feature exploration for magnetic fields is profoundly vital for the designated magnetic configuration [
19]. Nevertheless, the existing magnetic rollers for ECS widely employ the radial array configuration, though there is much difficulty in separating large volumes of scrapped metal since the magnetic field in the roller surface surroundings is weak.
With the development of computers, ML has become increasingly important in scientific research as artificial intelligence science. As a classical machine learning technique, SVR has gained rapid development based on the unique advantages of high-dimensional nonlinear pattern recognition involving small sample sizes. However, no model can perform well in all cases. A single support vector machine still has some limitations. At present, the selection of the kernel function only depends on experience and trial, usually according to the specific problem to choose the appropriate function. In this study, polynomial, sigmoid, linear, and radial basis functions are utilized. Support vector regression with better parameters is chosen for modeling. As an algorithm of swarm intelligence optimization inspired primarily by the anti-predatory and foraging behaviors of sparrows, the SSA was put forward in 2020 by Xue [
20]. The superiorities of this novel algorithm include rapid convergence and a powerful optimization capability. Apart from being a discoverer–follower model, the exploration and prewarning mechanism is also incorporated into the foraging process, during which the sparrows are categorized under explorers (discoverers) and followers (participants). The discoverers take charge of searching for food and offering orientation and zones of foraging for the entire sparrow population, while the participants take charge of attaining food via the discoverers. Meanwhile, some individuals in the population are chosen for exploration and prewarning. In case danger is perceived by the sparrow population, anti-predatory behavior will be initiated. The SSA optimization model has never been used for magnetic rollers. Hence, this study attempts to upgrade the roller model performance based on the SSA, which enables automatic parameter tuning rather than manual tuning, and to validate the SSA’s applicability in optimization modeling for the magnetic rollers. Then, the optimization of Halbach magnetic rollers is accomplished by the sparrow search algorithm (SSA).
Due to the difficulty of finite element modeling, this paper proposes a novel scheme of magnetic roller optimization that concentrates on ML. The main contributions of this study lie in the following two aspects: (1) SVRs with different kernel functions are proposed. The model does not require a specific choice of kernel function and thus enhances the adaptability of the SVR to the data. In addition, the SSA is employed to globally search for the optimal parameters of the magnetic roller. (2) Using the numerical simulation data from the magnetic roller, the results demonstrate that the proposed scheme can reach higher accuracy, compared with the response surface methodology (RSM) for magnetic roller optimization. The proposed strategy is more likely to obtain good prediction results by considering the interactions and the samples in the optimization process.
3. Results and Discussion
3.1. Effect of Geometric Parameters on the Maximum Magnetic Induction Intensity
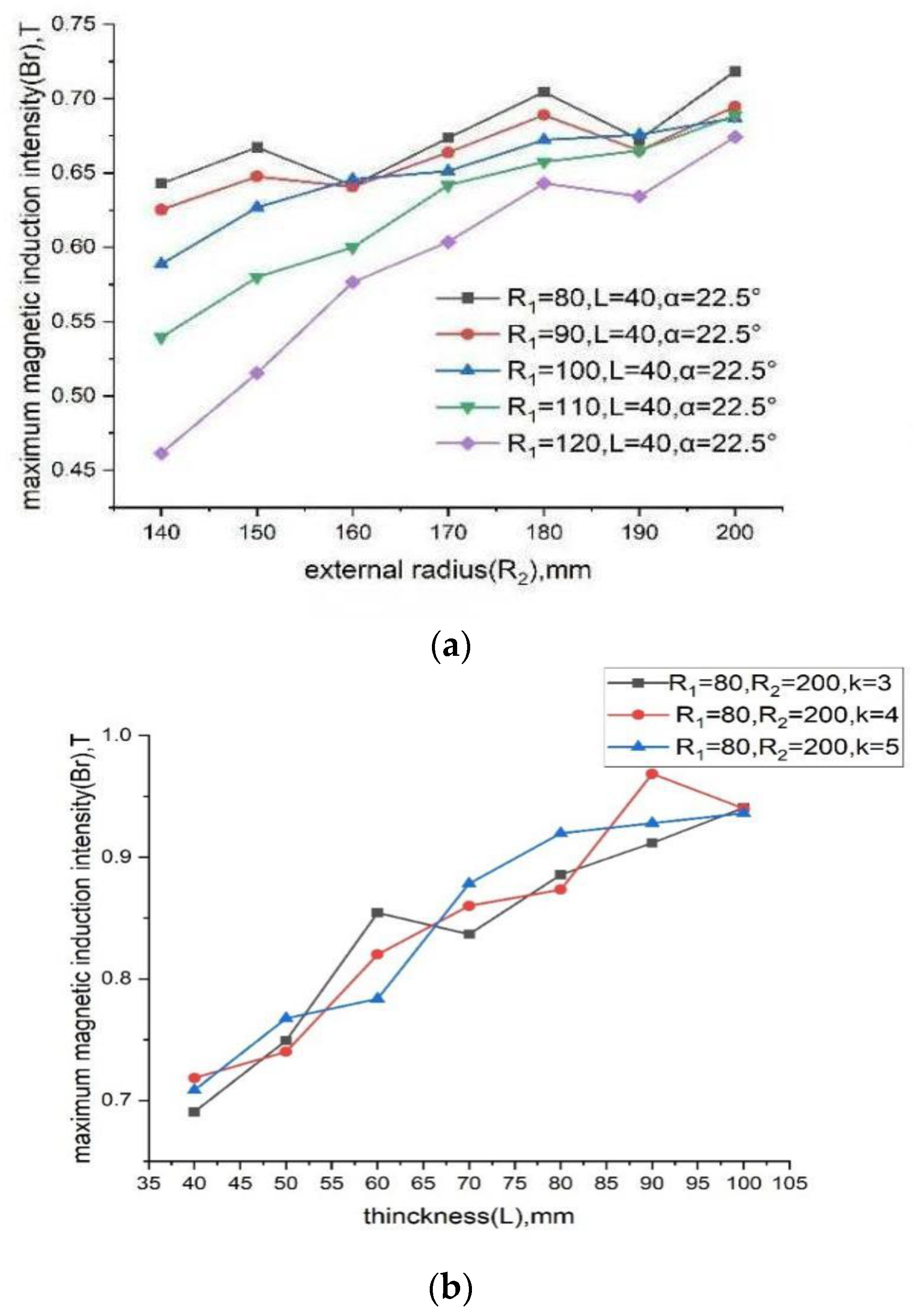
Based on the above-mentioned magnetic field models, the tangential magnetic induction intensity around the magnetic roller surface is associated with the external radius (R2), internal radius (R1), thickness (L), and sector angle (α) of a single permanent magnet. Using the above four parameters, we conduct numerical simulations for the Halbach magnetic rollers with a different external radius (R2), internal radius (R1), thickness (L), and sector angles (α) of a single permanent magnet, as well as the optimal parameters of external radius (R2), internal radius (R1), thickness (L), and sector angles (α) of the maximum tangential magnetic induction intensity around the magnetic roller surface (Br). In this study, the air gap and soft iron are neglected.
To minimize the computational load, a cycle of three-dimensional models is employed. During the optimization, the external radius (R
2) of a single permanent magnet rises from 140 to 200 mm with a step of 10 mm, while the internal radius (R
1) increases from 80 to 120 mm with a step of 10 mm, with the remaining two parameters being constant (L = 40, α = 22.5°). The variations in Br with R
1 and R
2 are presented in
Figure 5a. The dependent variable Br exhibits an elevation with an increasing R
1 and R
2 in general. It rises faster when the external radius is less than 180 m, and it later increases more slowly. There is a certain randomness. In more detail, the Halbach magnetic roller with a smaller internal radius and a larger external radius works with a higher magnetic strength.
The thickness of a single permanent magnet also has a certain effect on the surface magnetic field’s strength. From the above analysis, the Halbach magnetic roller’s external radius (R2) equals 200 mm, and the Halbach magnetic roller has an internal radius (R1) of 80 mm in the current investigation. Under this condition, the maximum intensity of magnetic induction outside the roller surface can reach the maximum. We still take α = 22.5°. Based on the three parameters, the effect of the thickness of a single permanent magnet on the magnetic field is investigated. During the optimization, the thickness of a single permanent magnet rises from 40 mm to 80 mm with the step of 10 mm.
Figure 5b shows the thickness of a single permanent magnet with four pole pairs having a significance on the tangential intensity of magnetic induction in the roller surface periphery as well. We can observe that k = 4 (α = 22.5°) is preferable. By contrast, the impact of R
1 and R
2 on Br is limited.
From the above analysis, it can be seen that the intensity of the magnetic field in the roller surface vicinity increases with increasing geometric size of a single permanent magnet on the presumption that the pair of magnetic poles is constant, while the influence on the surface is not particularly obvious when it increases to a certain degree on the whole. Thus, the four parameters, i.e., R1, R2, k, and L, need to be balanced in the optimal design of a concentric Halbach magnetic roller. For the current investigation, the parameter combination of R1 = 200 mm, R2 = 80 mm, L = 80 mm, and k = 4 (α = 22.5°) generates a good maximum Br of 0.8733T. Although the maximum value can be over 1 T when L is over 90 mm, the minimum value is below 0.2 T, which is not beneficial for the separation of larger scrap. In addition, the larger the structure, the more unfavorable the permanent magnet installation and manufacturing. Therefore, this combination of R1 ∈ [160, 200], R2 ∈ [80, 120], L ∈ [50, 80], and k = 4 (α = 22.5°) is adopted and applied in the following investigation.
3.2. Response Surface Analysis
3.2.1. Response Models
RSM model assessment was accomplished via the BBD in Design-Expert. To illustrate the output–input parameter correlations, the linear, quadratic, and bivariate interactions (2FI) were evaluated. The suggested optimal response models were chosen according to p < 0.05, where the significant regression coefficients approached 1. Table 5 details the fit statistics for the reduced cubic model, whose SD and R2 (correlation coefficient) values were significant (p < 0.05). The adjusted R2, which quantifies the variance around the model-explained mean, was below 0.20, an admissible model significance standard for the prediction in the absence of setbacks.
The RSM-BBD-derived response surface models exhibit quadratic functions of the actual input parameters as formulated in Equation (19). X
1, X
2, and X
3 represent the internal radius, external radius, and thickness of a single permanent magnet, respectively. The comparison of factor coefficients is conducive to unraveling the factors’ relative influence. Regarding the synergistic effect of terms, the positive and negative signs of respective peculiar coefficients serve as the determinants. Values of positive and negative coefficients in the model term indicate synergy and antagonism, respectively. Similarily, the terms of the interactive model discovered are (X
1X
2, X
1X
3, X
2X
3), with the three factors having no interaction. The model equation enables a response forecast for a predefined level of parameters as formulated in Equation (19):
3.2.2. Analysis of Variance (ANOVA)
According to the ANOVA outcomes in
Table 1,
Table 2 and
Table 3, the significant terms comprised linear, quadratic, and interactive terms with
p < 0.05. F-values were employed for the significance assessment for relevant terms, while the regression model significance was presented by
p-values [
26,
27]. The confidence level in the analysis of
p probability was set at 95%. Despite
p > 0.05 for several terms, which were thus insignificant, we included them in the final model to clarify their precision and predictability with R
2 > 0.95. The RSM coefficient of variation (CV < 10%) was computed, serving as the SD for the output parameter’s mean. Every term in the quadratic model was subjected to the significance evaluation according to the
p-value [
27]. Significance assessment on the model was accomplished through the Fisher’s F-test, and so was the importance assessment on every independent input term. The relevant calculation was accomplished by varying the mean square of the model by the residual error. A greater F-value indicated a more significant term of the model on the answer. The quadratic model was considered acceptable when
p was <0.05. The ratio of the explained variation to the total variation R
2 was 0.9596, which is more than 0.9. That is to say, the relationship between the factor variables and response was significant, and the data can be well reflected by the model. The Adj. R
2 of 0.8870 was not in reasonable agreement with the Pre. R
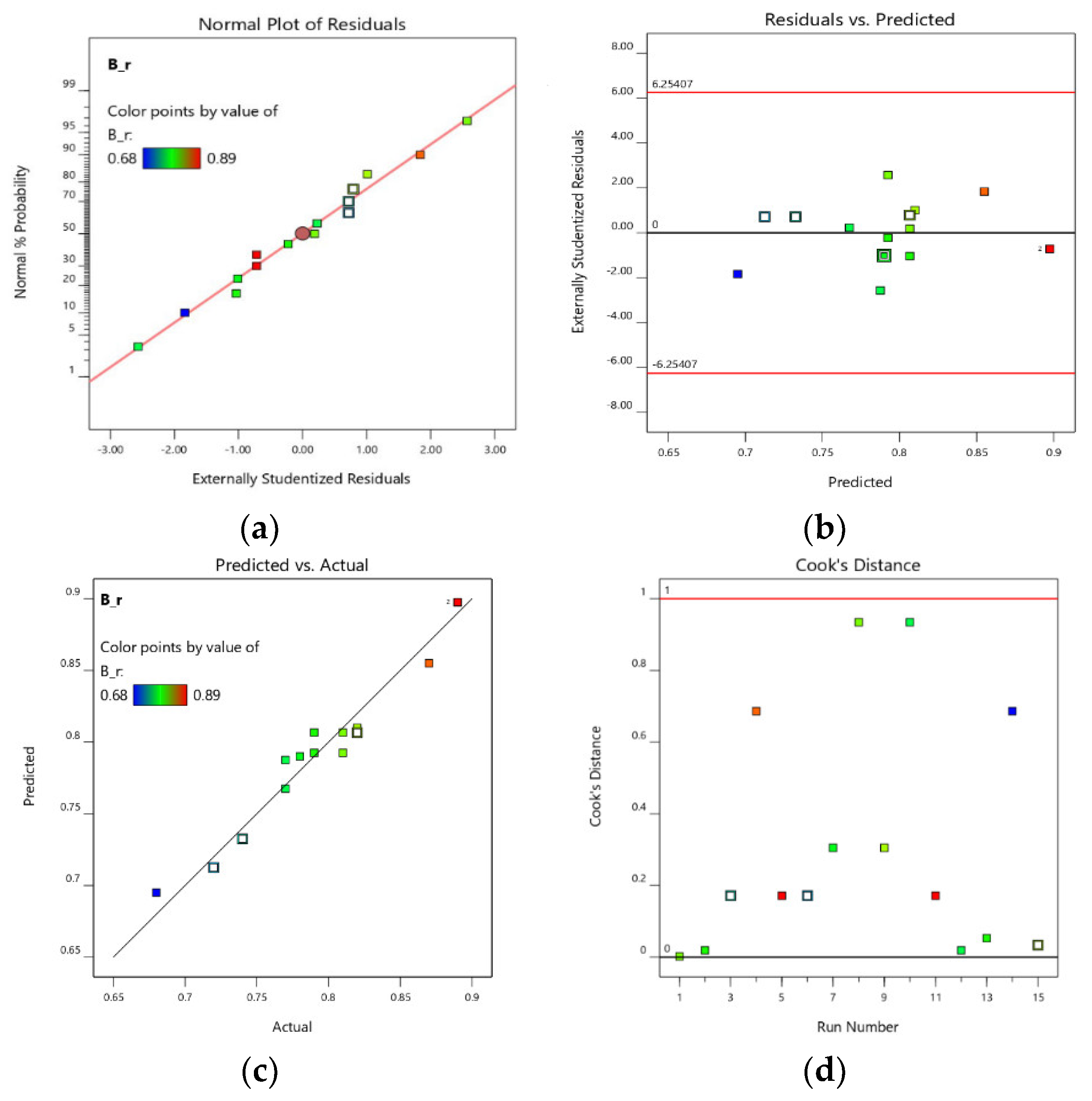
2 of 0.4860, and the difference was more than 0.2, indicating that the fitting results were not in good agreement with the simulation results and the fitting reliability was low.
Figure 6 shows that the status of the residual is not normally distributed. The data of residuals 1, 2, 12, and 15 are inconsistent, so the data points are abnormal, which can be removed directly. The residual after removing the same data points is still normal. It is considered that the model is effective in general, while the fitting effect of the model is mediocre.
3.2.3. Response 3D Plots
For the interactivity assessment of the input parameters plus the response, 3D response plots and other graphical approaches could be employed. For the maximum magnetic induction intensity around the surface of the roller (Y), the response variables are presented graphically against two individual design parameters (X
1X
2) in
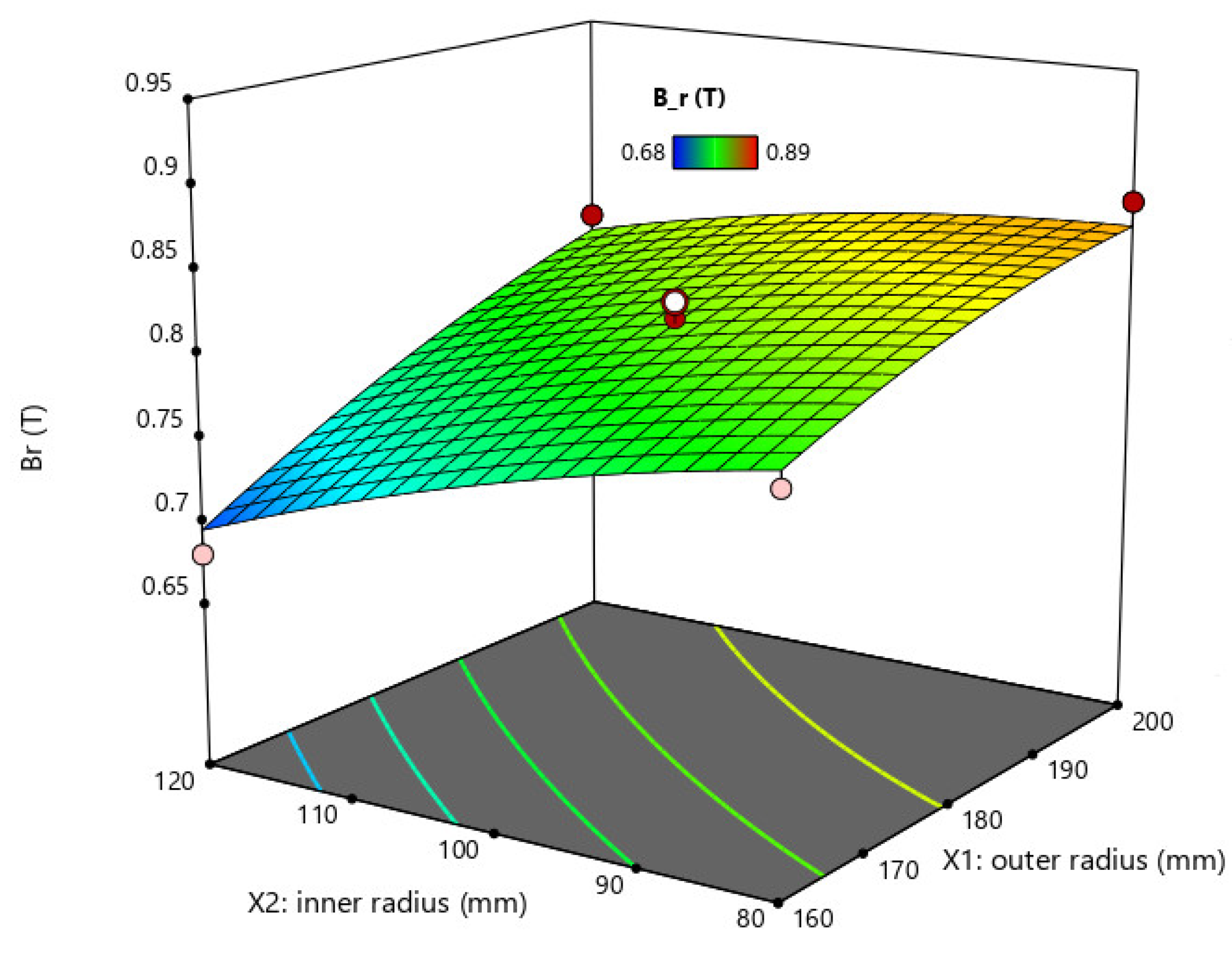
Figure 7. The model-based generation of surface plots was performed through the alteration of two arbitrary variables (internal radius, external radius, or thickness of a single permanent magnet) inside the design space, during which the remaining individual component constant was maintained at its midpoint. Graphically, as shown in
Figure 7, the response surface was arc-shaped, with the optimal zone for maximum magnetic induction intensity around the surface of the roller at the high–low X
1X
2 levels. Based on the plateau-shaped response surface in
Figure 7, the optimal zone for the response was at the extreme X
1X
2 levels. In the 3D response plots, the visible peaks suggest that the suitable conditions enabling the performance of response variables to be optimal were inside the horizon or border of the design space. As shown in the graphs, the internal radius and external radius of a single permanent magnet had a substantial effect on the maximum magnetic induction intensity around the surface of the roller (
Figure 7).
3.3. Comparing the Results of Kernel Functions of SVR
In our simulation study, we compare the four kernels (linear, sigmoid, polynomial, and radial basis kernel functions), as introduced in
Section 3. These compared kernels are implemented in MATLAB R2022a. A regression support vector machine model is created using FITRSVM.
The superiorities and deficiencies of the training model are assessed by such indices as the RMSE, accuracy, and MSCC. A lower RMSE, which is the variance, indicates better SVM stability. A higher accuracy represents a better result. A higher MSCC, which refers to the linear correlation between experimental and predicted value variances, indicates a superior model.
Since the emphasis of the present work is laid on the type selection for the kernel function, the method of a predefined constant value is employed for the SVM-associated penalty parameter C, as well as the RBF parameter g. Specifically, the RBF and the hybrid kernel function parameter C comprising RBF are assigned as 100 experientially, while the value of parameter g is assigned as 0.1. For other kernel functions and hybrid kernel functions without a radial basis, the parameter C setting is 1.72.
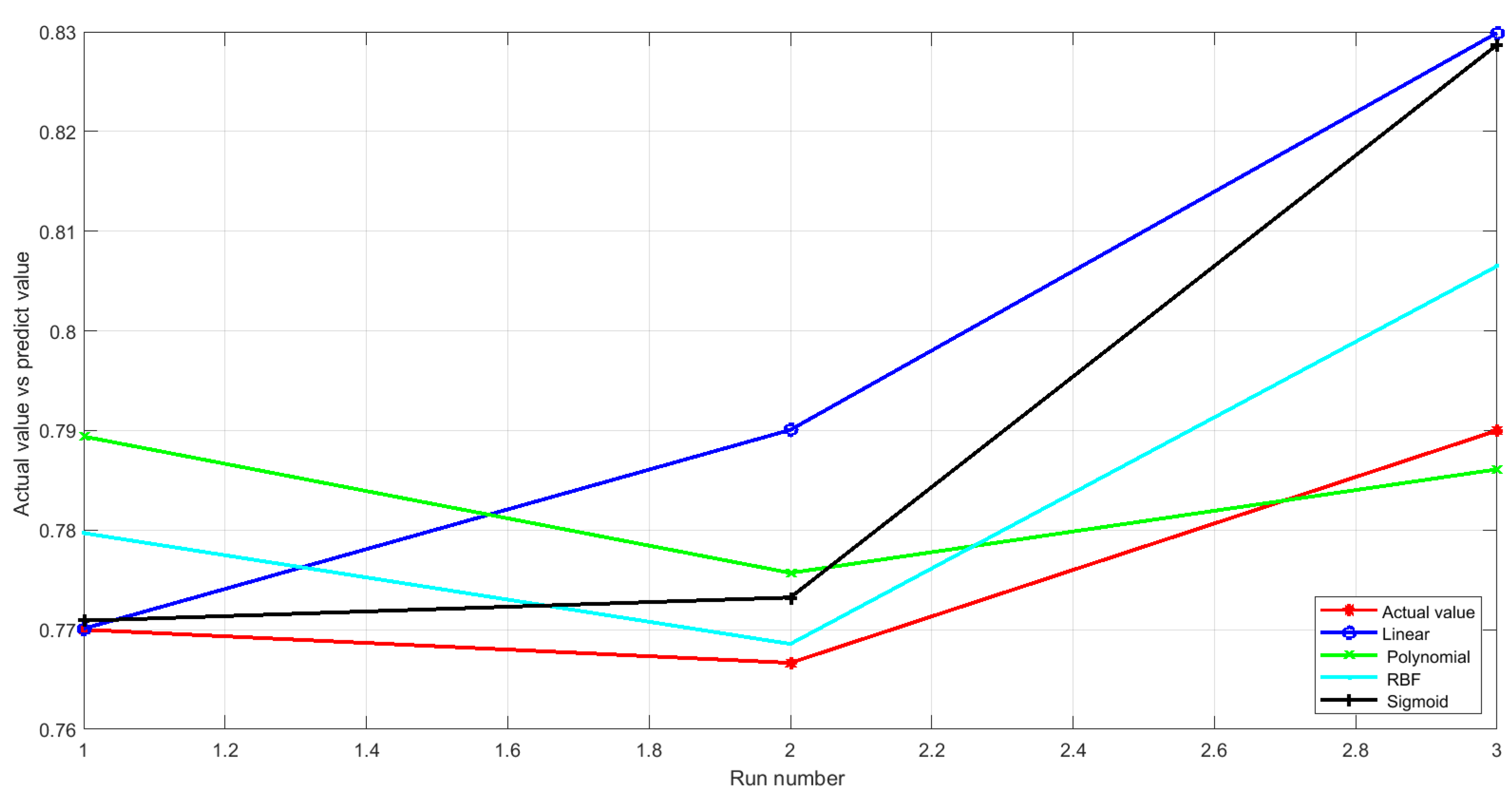
Figure 8 presents the comparison of four kernels regression results. The linear regression result exhibits a 0.0026 RMSE, a 99.9340% accuracy, and a 0.97228 MSCC. The polynomial regression result exhibits a 0.0133 RMSE, a 99.9824% accuracy, and a 0.78099 MSCC. Based on the RBF regression, the RMSE is 0.0162, the accuracy is 99.9738%, and the MSCC is 0.9894. According to the sigmoid regression result, the RMSE is 0.0251, the accuracy is 99.9368%, and the MSCC is 0.97696.
Table 4 summarizes all the data. Obviously, the precision of the investigated kernel functions is high. The RMSE of RBF is highest, far more than 0.9596 of RSM. To sum up, RBF generates greater regression results.
3.4. Optimization Using SSA
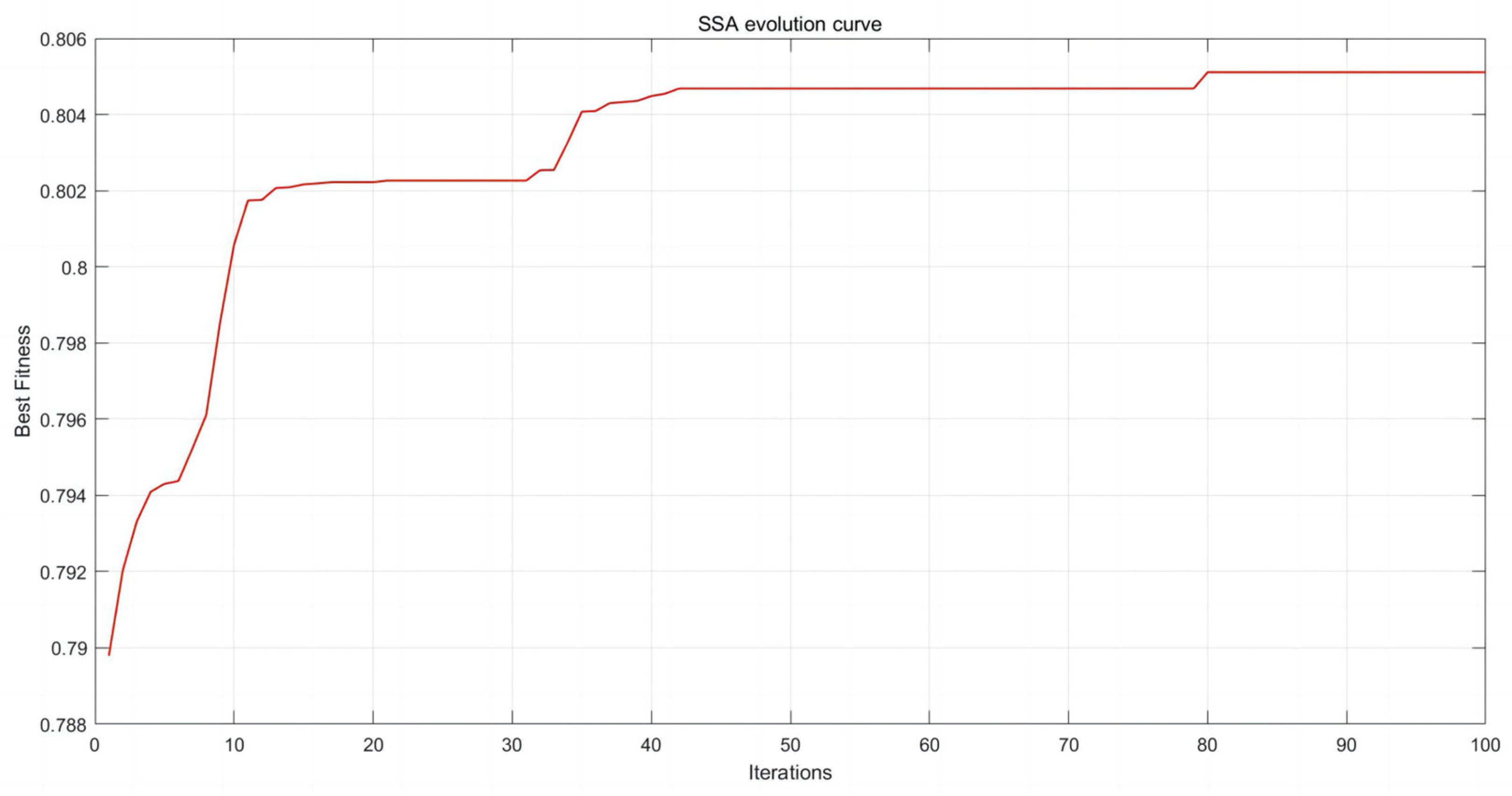
The model established according to the above RBF is used as the fitness function of the SSA. The use of the SSA to find the magnetic roller indicates the maximum magnetic induction intensity setting Max_iter = 100, pop = 50. As shown in
Figure 9, with the increasing evolutionary number, the best and average values of fitness for the population both present a tortuous upward trend. After 20 iterations, both the best and average values of fitness for the population tend to be stable. When the best and average values of fitness are identical for the population, the residual value is obtained. For the corresponding objective function of the transmission algorithm, its optimal solution (predicted value) is Y = 0.9061, more than the 0.89 of RMS, and the optimized variable values X are 193. 0740, 85.4563, and 80.4532.
5. Conclusions
In this study, to optimize the numerical simulation results by using machine learning for the first time and to improve the generalization capability of SVR, a novel strategy is proposed, in which the four common kernel functions are compared. Then, the SSA is employed to optimize the structural parameters of the Halbach magnetic roller. The process solves both the kernel function selection and parameter selection problems. Through the case study, the following conclusions are obtained.
The results show that machine learning for magnetic roller optimization is feasible.
The methodology of comparing four kernel functions improves the accuracy of prediction compared with the single kernel SVR model.
More accurate model selection results are obtained by utilizing the SSA for structural parameter optimization of the Halbach magnetic roller.
In conclusion, our strategy provides an alternative without establishing a large number of finite element models.
The process successfully improves the prediction of intensity over the roller surface of the Halbach magnetic roller using machine learning, providing a valuable reference for Halbach magnetic roller optimization. However, our study still has some limitations. Firstly, numerical simulation data are the input to the model in our work. Secondly, the samples of SVR are limited, and thus, a linear fitting error may exist. Therefore, our future work is presented as follows: (1) adding more samples into the training of the model; (2) developing more efficient optimization algorithms to compare, and then confirming the optimal structural parameters of the Halbach magnetic roller; (3) adding deep learning algorithms into our numerical simulation models, and (4) validating models by manufacturing a virtual prototype.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}