
A Multiagent Game Theoretic Simulation of Public Policy Coordination through Collaboration


Abstract
:1. Introduction
2. Literature Review
2.1. Theoretical Framework
2.2. Simulation Methods
2.3. Contribution
3. Materials and Methods
3.1. The Model to Be Simulated
3.2. The Game and the Multiagent System
3.2.1. Adaptations
- Cost of transmitting and transforming information
- 2.
- Behavior of agents
3.2.2. Interaction of Agents
3.2.3. The Payoff of Agents
3.2.4. Expected Payments and the Replicator Dynamics
4. Results
4.1. The Simulation and the Three Scenarios
4.1.1. Scenario 1—Noncoordination
4.1.2. Scenario 2—Coordination through Cooperation
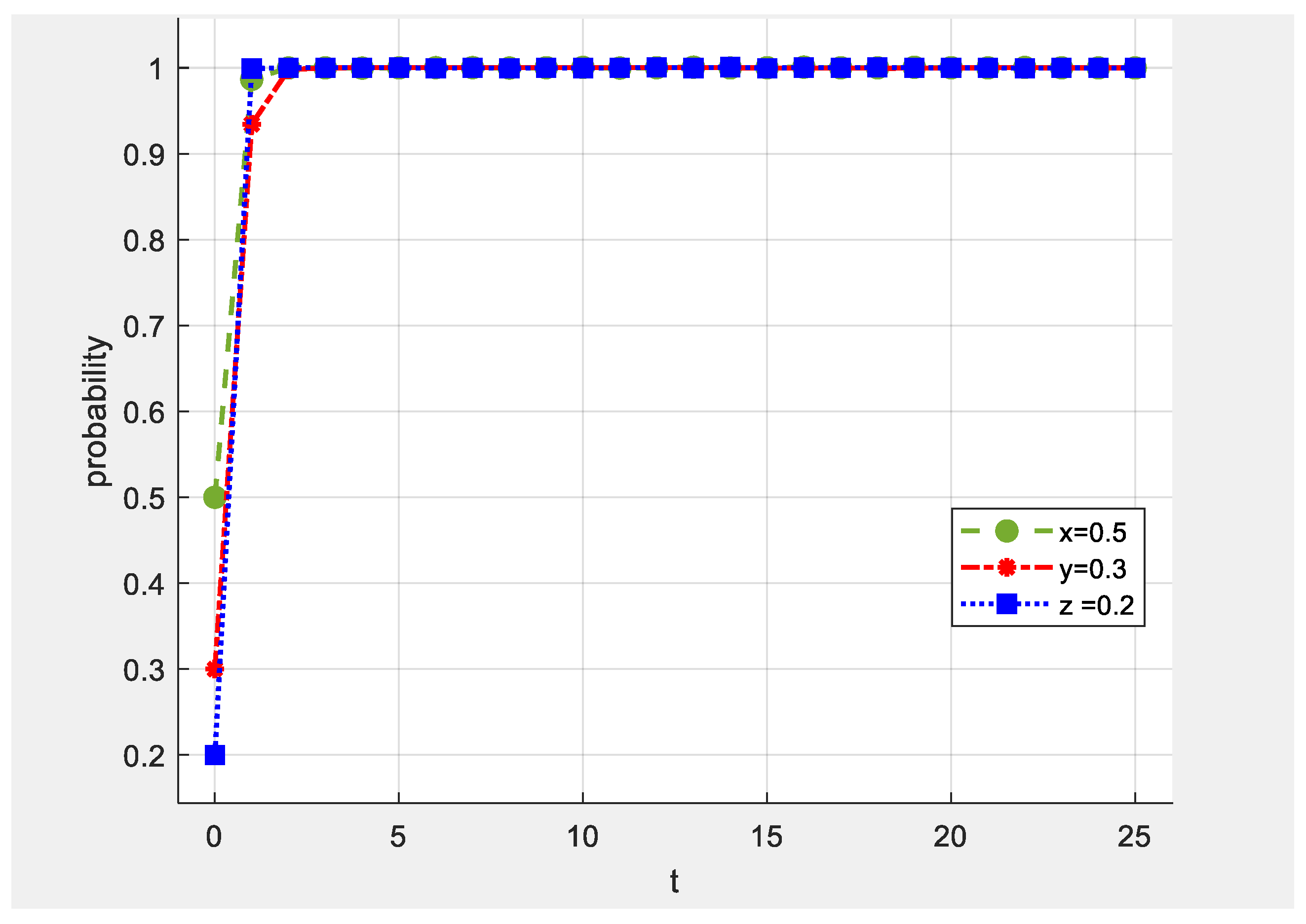
4.1.3. Scenario 3—Coordination through Collaboration
4.2. Achieving Collaboration
4.2.1. α Probability of Sending Information
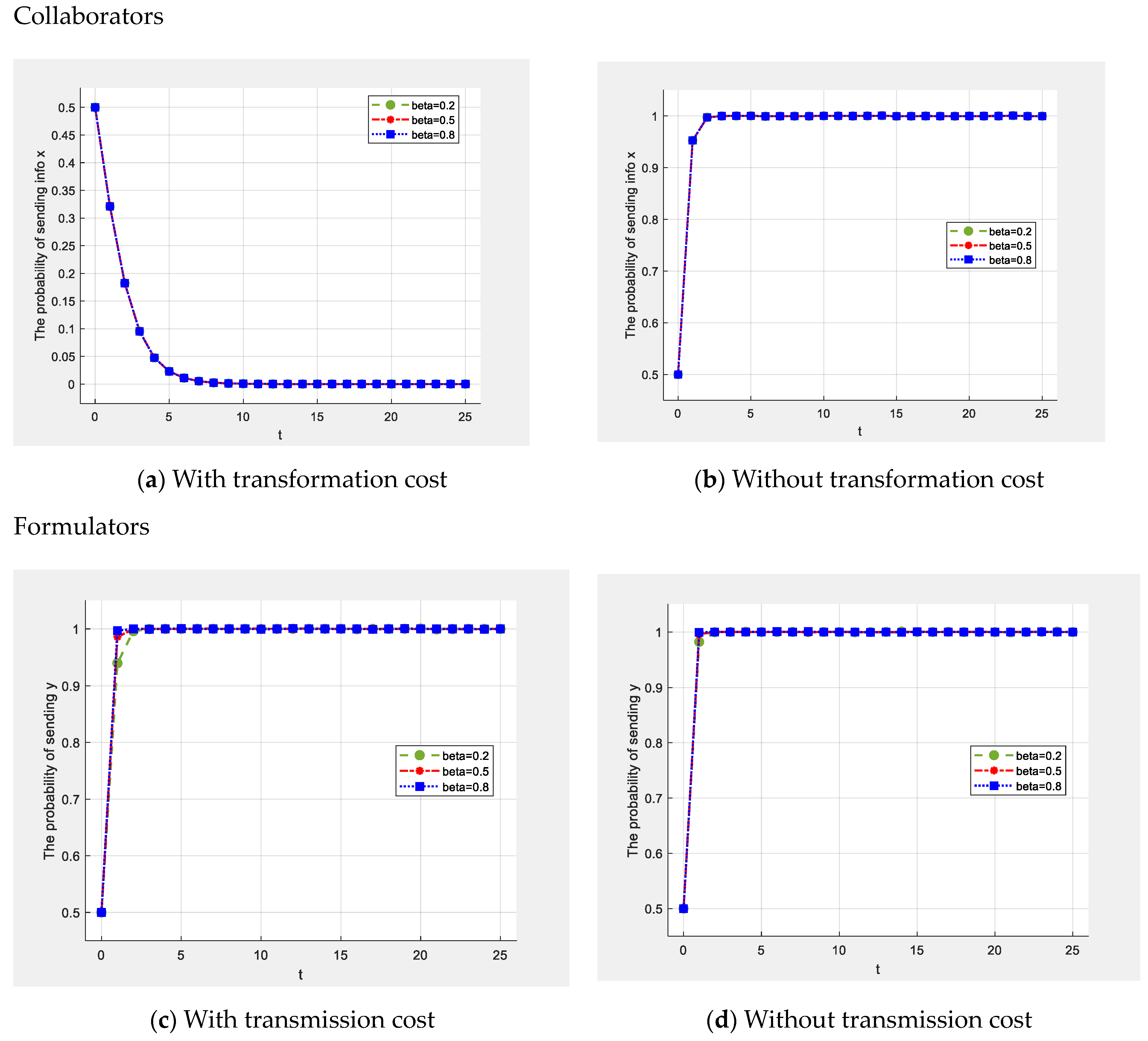
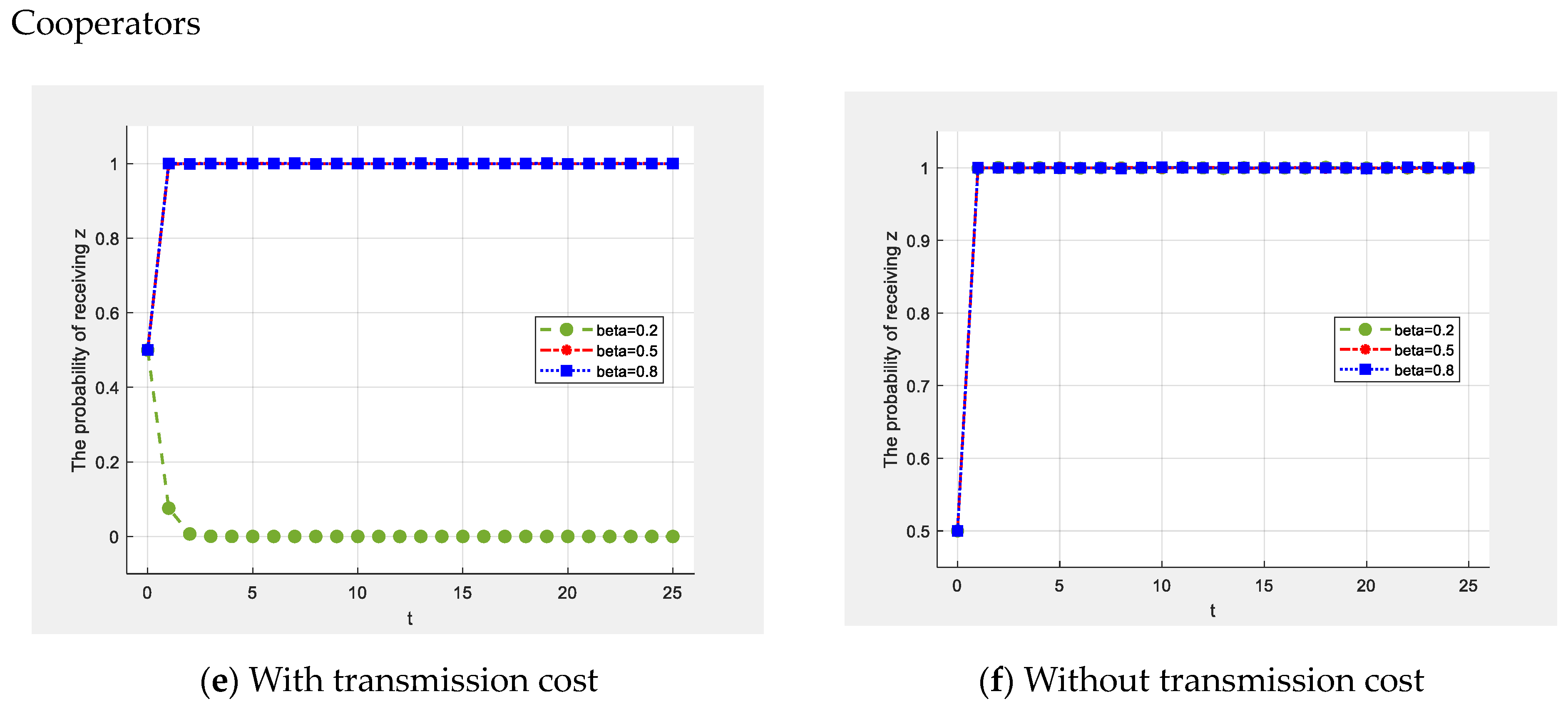
4.2.2. β Probability of Receiving Information
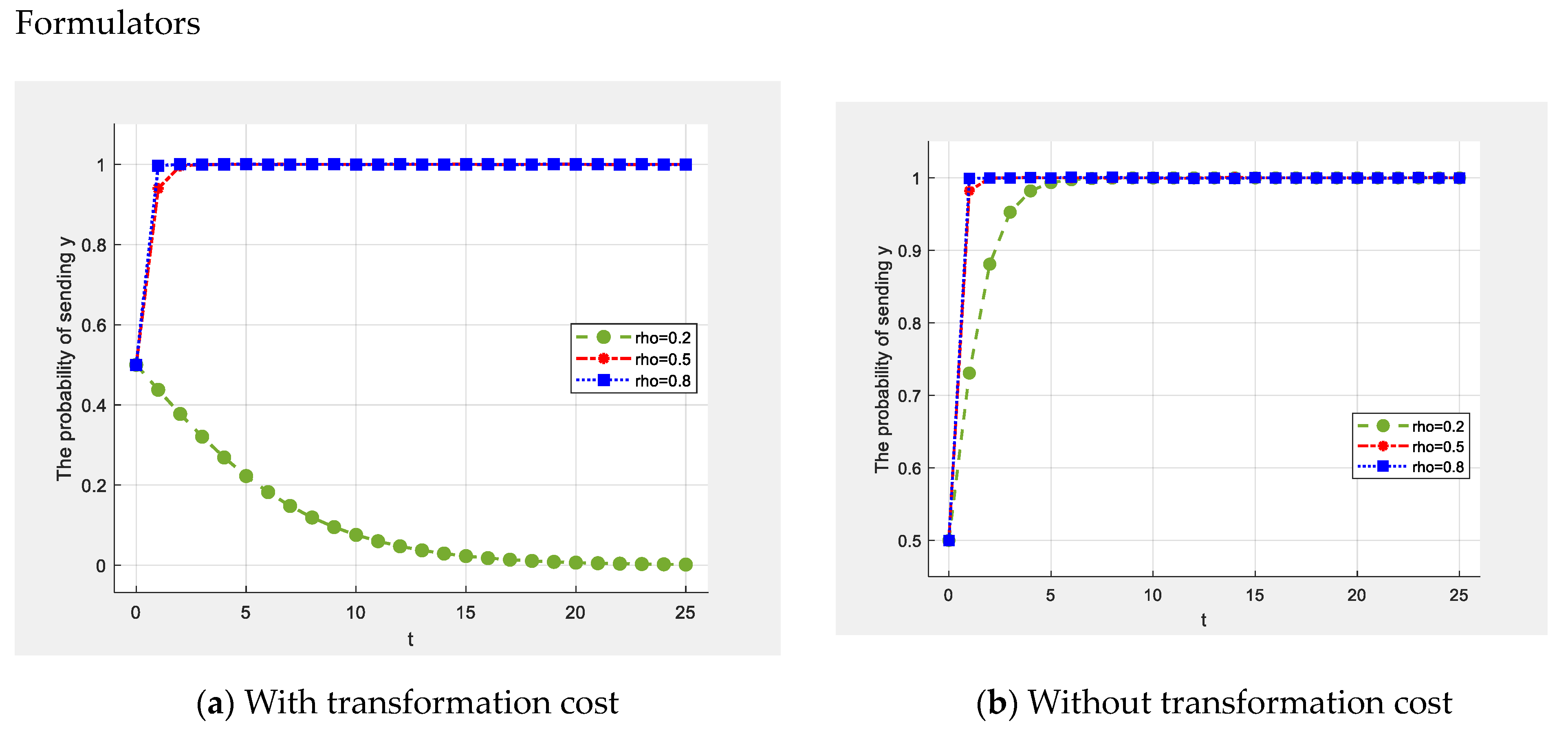
4.2.3. ρ Probability of Successful Transmission
4.2.4. γ Probability of Collaboration
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Peters, B. Public Policies: Coordination, Integration, Coherence, and Collaboration. Oxford Research Encyclopedia of Politics. 2021. Available online: https://oxfordre.com/politics/view/10.1093/acrefore/9780190228637.001.0001/acrefore-9780190228637-e-164 (accessed on 7 July 2023).
- Ghymers, C. Fomentar la Coordinación de las Políticas Económicas en América Latina; CEPAL: Santiago de Chile, Chile, 2005; ISBN 9213226802. [Google Scholar]
- Peters, B.G. The challenge of policy coordination. Policy Des. Pract. 2018, 1, 1–11. [Google Scholar] [CrossRef]
- Peters, B.G.; Pierre, J. Governance without Government? Rethinking Public Administration. J. Public Adm. Res. Theory 1998, 8, 223–243. [Google Scholar] [CrossRef]
- Repetto, F. Capacidad Estatal: Requisito Para el Mejoramiento de la Política Social en América Latina. INDES Working Paper Series I-52. 2004. Available online: https://publications.iadb.org/es/publicacion/14523/capacidad-estatal-requisito-para-el-mejoramiento-de-la-politica-social-en-america (accessed on 31 January 2023).
- Morgan, M.S. The World in the Model: How Economists Work and Think; Cambridge University Press: London, UK, 2012. [Google Scholar] [CrossRef]
- Bianchi, C.; Peters, B.G. Patronage and the public service: A dynamic performance governance perspective. In Enabling Collaborative Governance through Systems Modeling Methods; Bianchi, C., Luna-Reyes, L.F., Rich, E., Eds.; Springer: Berlin, Germany, 2020; Volume 4, pp. 215–236. [Google Scholar] [CrossRef]
- Bouckaert, G.; Peters, B.G.; Verhoest, K. The coordination of public sector organizations. In Shifting Patterns of Public Management; Palgrave Macmillan: London, UK, 2010. [Google Scholar] [CrossRef]
- Ramírez, J.C.; Peñaloza, M.C. La coordinación en las políticas públicas: Elementos e institucionalidad. In Reunión de Expertos CEPAL: Gestión y Financiamiento de las Políticas que Afectan a las Familias; Sala Celso Furtado: Santiago de Chile, Chile, 2006. [Google Scholar]
- Bondavalli, C.; Favilla, S.; Bondini, A. Quantitative versus qualitative modelling: A complementary approach in ecosystem study. Comput. Biol. Chem. 2009, 33, 22–28. [Google Scholar] [CrossRef]
- Romer, P. Mathiness and Academic Identity. 2015. Available online: https://paulromer.net/mathiness-and-academic-identity/ (accessed on 31 March 2023).
- Qasem, M.; Hudaib, A.; Obeid, N. Multiagent system for mutual collaboration classification for cancer detection. Math. Probl. Eng. 2019, 2019, 2127316. [Google Scholar] [CrossRef]
- Newton, J.; Wait, A.; Angus, S. Watercooler chat, organizational structure and corporate culture. Games Econ. Behav. 2019, 118, 354–365. [Google Scholar] [CrossRef]
- Agur, I. Monetary and Macroprudential Policy Coordination Among Multiple Equilibria; IMF Working Papers; IMF: Washington, DC, USA, 2018; Volume 235, pp. 1–33. [Google Scholar] [CrossRef]
- Du, J. An Evolutionary Game Coordinated Control Approach to Division of Labor in Multi-Agent Systems. IEEE Access 2019, 7, 124295–124308. [Google Scholar] [CrossRef]
- Tanaka, M.; Chen, Y.; Siddiqui, A.S. Regulatory jurisdiction, and policy coordination: A bi-level modelling approach for performance-based environmental policy. J. Oper. Res. Soc. 2022, 73, 509–524. [Google Scholar] [CrossRef]
- Myerson, R.B. Game Theory: USA Analysis of Conflict; Harvard University Press: Cambridge, MA, USA, 1997; ISBN 978-0674341166. [Google Scholar]
- Rapoport, A. Game Theory as a Theory of Conflict Resolution; An international series in the philosophy and methodology of the social and behavioral sciences; Rapoport, A., Ed.; Springer: Dordrecht, The Netherlands, 1974; Volume 2. [Google Scholar] [CrossRef]
- Gou, Z.; Deng, Y. Dynamic model of collaboration in multi-agent system based on evolutionary game theory. Games 2021, 12, 75. [Google Scholar] [CrossRef]
- Ostrom, E.; Poteete, E.; Janssen, M. Working Together: Collective Action, the Commons, and Multiple Methods in Practice; Princeton University Press: Princeton, NJ, USA, 2010; ISBN 9780691146041. [Google Scholar]
- Ohtsuki, H. Evolutionary dynamics of coordinated cooperation. Front. Ecol. Evol. 2018, 6, 62. Available online: https://www.frontiersin.org/articles/10.3389/fevo.2018.00062/full (accessed on 6 April 2023). [CrossRef] [Green Version]
- Ostrom, E. Collective action and the evolution of social norms. J. Econ. Perspect. 2000, 14, 137–158. [Google Scholar] [CrossRef]
- Reyes, J.; Iyer, S.; Killingback, T. An application of evolutionary game theory to social dilemmas: The traveller’s dilemma and the minimum effort coordination game. PLoS ONE 2014, 9, e0093988. [Google Scholar] [CrossRef]
- Maas, A.; Goemans, C.; Manning, D.; Kroll, S.; Brown, T. Dilemmas, coordination, and defection: How uncertain tipping points induce common pool resource destruction. Games Econ. Behav. 2017, 104, 760–774. [Google Scholar] [CrossRef]
- Sandholm, W.H. Population Games and Evolutionary Dynamics; The MIT Press: Cambridge, MA, USA, 2010; ISBN 978-0262195874. [Google Scholar]
- Tanimoto, J. Fundamentals of Evolutionary Game Theory and Its Applications; Springer: Tokyo, Japan, 2015; Volume 6. [Google Scholar] [CrossRef]
- Bacharach, M. Beyond Individual Choice: Teams and Frames in Game Theory; Gold, N., Sugden, R., Eds.; Princeton University Press: Princeton, NJ, USA, 2006; ISBN 9780691120058. [Google Scholar]
- Angus, S.D.; Newton, J. Emergence of shared intentionality is coupled to the advance of cumulative culture. PLoS Comput. Biol. 2015, 11, e1004587. [Google Scholar] [CrossRef]
- Newton, J. Shared intentions: The evolution of collaboration. Games Econ. Behav. 2017, 104, 517–534. [Google Scholar] [CrossRef] [Green Version]
- Blankespoor, E.; Dehaan, E.; Marinovic, I. Disclosure processing costs and investors’ information choice: A literature review. J. Account. Econ. 2020, 70, 101344. [Google Scholar] [CrossRef]
- Hefeker, C.; Neugart, M. Policy Coordination under Model Disagreement and Uncertainty. Open Econ. Rev. 2019, 30, 719–737. [Google Scholar] [CrossRef] [Green Version]
- Hashimoto, T.; Yamada, H. Considering provision of global public goods with community task game: A multi-agent simulation analysis. In Emerging Risks in a World of Heterogeneity; Tadokoro, M., Egashira, S., Yamamoto, K., Eds.; Springer: Berlin, Germany, 2018; pp. 175–196. [Google Scholar]
- Čech, P.; Tučník, P.; Bureš, V.; Husáková, M. Modelling complexity of economic system with multi-agent systems. In Proceedings of the 5th International Conference on Knowledge Management and Information Sharing (KMIS 13), Vilamoura, Algarve, Portugal, 19–22 September 2013. [Google Scholar]
- Guthula, S.; Simon, S.S.; Karnick, H. Analysis of agricultural policy recommendations using multi-agent systems. arXiv 2020, arXiv:2008.04947. Available online: https://arxiv.org/pdf/2008.04947.pdf (accessed on 6 April 2023).
- Krolikowski, R.; Kopys, M.; Jedruch, W. Self-organization in multi-agent systems based on examples of modelling economic relationships between agents. Front. Robot. AI 2016, 3, 41. Available online: https://www.frontiersin.org/articles/10.3389/frobt.2016.00041/full (accessed on 4 April 2023). [CrossRef]
- Axtell, R. Multi-agent systems macro: A prospectus. In Post Walrasian Macroeconomics Beyond the Dynamic Stochastic General Equilibrium Model; Colander, D., Ed.; Cambridge University Press: Cambridge, UK, 2009; pp. 203–220. [Google Scholar] [CrossRef]
- Sklar, E.; Davies, M.; Co, M.S.T. SimEd: Simulating Education as a Multi Agent System. In Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems, New York, NY, USA, 19–23 July 2004; Volume 3, pp. 998–1005. [Google Scholar]
- Palau, A.; Dhada, M.; Parlikad, A. Multi-agent system architectures for collaborative prognostics. J. Intell. Manuf. 2019, 30, 2999–3013. [Google Scholar] [CrossRef] [Green Version]
- Vistbakka, I.; Troubitsyna, E. Modelling resilient collaborative multi-agent systems. Computing 2020, 103, 535–557. [Google Scholar] [CrossRef]
- Byrski, A.; Dreżewski, R.; Siwik, L.; Kisiel-dorohinicki, M. Evolutionary multi-agent systems: From Inspirations to Applications. In Studies in Computational Intelligence; Springer: Berlin, Germany, 2017; Volume 680. [Google Scholar] [CrossRef]
- Yongbo, S. multi-agent evolutionary game in the recycling utilization of construction waste. Sci. Total Environ. 2020, 738, 139826. [Google Scholar] [CrossRef]
- Liu, M. Assessing human information processing in lending decisions: A machine learning approach. J. Account. Res. 2022, 60, 607–651. [Google Scholar] [CrossRef]
- Blankespoor, E. The impact of information processing costs on firm disclosure choice: Evidence from the XBRL mandate. J. Account. Res. 2019, 57, 919–967. [Google Scholar] [CrossRef]
- Dehaan, E.; Madsen, J.; Piotroski, J. Do weather-induced moods affect the processing of earnings news? J. Account. Res. 2017, 55, 509–550. [Google Scholar] [CrossRef]
- Wickens, D.; Carswell, M. Information Processing. Handbook of Human Factors and Ergonomics, 5th ed.; Salvendy, G., Karwowski, W., Eds.; John Wiley & Sons: Hoboken, NJ, USA, 2021. [Google Scholar] [CrossRef]
- Kahneman, D. Thinking, Fast and Slow; Farrar, Straus, and Giroux: New York, NY, USA, 2013; ISBN 978-0374533557. [Google Scholar]
- Hassel, A.; Wegrich, K. How to Do Public Policy; Oxford University Press: Oxford, UK, 2022; ISBN 9780198747192. [Google Scholar]
- United Nations. Working Together: Integration, Institutions and the Sustainable Development Goals, World Public Sector Report, Division for Public Administration and Development Management; Department of Economic and Social Affairs, (DPADM): New York, NY, USA, 2018; ISBN 978-92-1-123207-3. [Google Scholar]
- Stinchcombe, A.L. Information and Organizations; University of California Press: Berkeley, CA, USA, 1990; Volume 19, ISBN 9780520067813. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description |
|---|---|
| Collaborators | |
| payments and costs associated with receiving messages from formulators | |
| payments and costs associated with sending messages to cooperators | |
| benefit for sharing the transformed information with formulators | |
| transformation cost | |
| probability of sending transformed information to formulators | |
| probability of receiving transmitted information from formulators | |
| Formulators | |
| payments and costs associated with sending all messages to collaborate | |
| payments and costs associated with sending only some messages | |
| benefits for receiving a response to the message to collaborate | |
| transmission cost | |
| probability of successful transmission of messages to collaborate | |
| send all the messages | |
| Cooperators | |
| payments and costs associated with receiving messages to collaborate from formulators | |
| payments and costs associated with receiving messages to collaborate from collaborators | |
| payments for receiving failed messages | |
| probability of collaboration when they successfully receive a message | |
| reward for collaborating with formulators and collaborators | |
| All (y = 1) | Some (0 < y < 1) | |||
|---|---|---|---|---|
| Accept (z) | Not Accept (1 − z) | Accept (z) | Not Accept (1 − z) | |
| Transform (x) | (W1, F1, B1) | (W2, F2, B2) | (W3, F3, B3) | (W4, F4, B4) |
| Not transform (1 − x) | (W5, F5, B5) | (W6, F6, B6) | (W7, F7, B7) | (W8, F8, B8) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Herrera-Medina, E.; Riera Font, A. A Multiagent Game Theoretic Simulation of Public Policy Coordination through Collaboration. Sustainability 2023, 15, 11887. https://doi.org/10.3390/su151511887
Herrera-Medina E, Riera Font A. A Multiagent Game Theoretic Simulation of Public Policy Coordination through Collaboration. Sustainability. 2023; 15(15):11887. https://doi.org/10.3390/su151511887
Chicago/Turabian StyleHerrera-Medina, Eleonora, and Antoni Riera Font. 2023. "A Multiagent Game Theoretic Simulation of Public Policy Coordination through Collaboration" Sustainability 15, no. 15: 11887. https://doi.org/10.3390/su151511887