
Improvement of Fault Ride-Through Capability of Grid Connected Wind Turbine Based on a Switched Reluctance Generator Using a Dynamic Voltage Restorer
Abstract
:1. Introduction
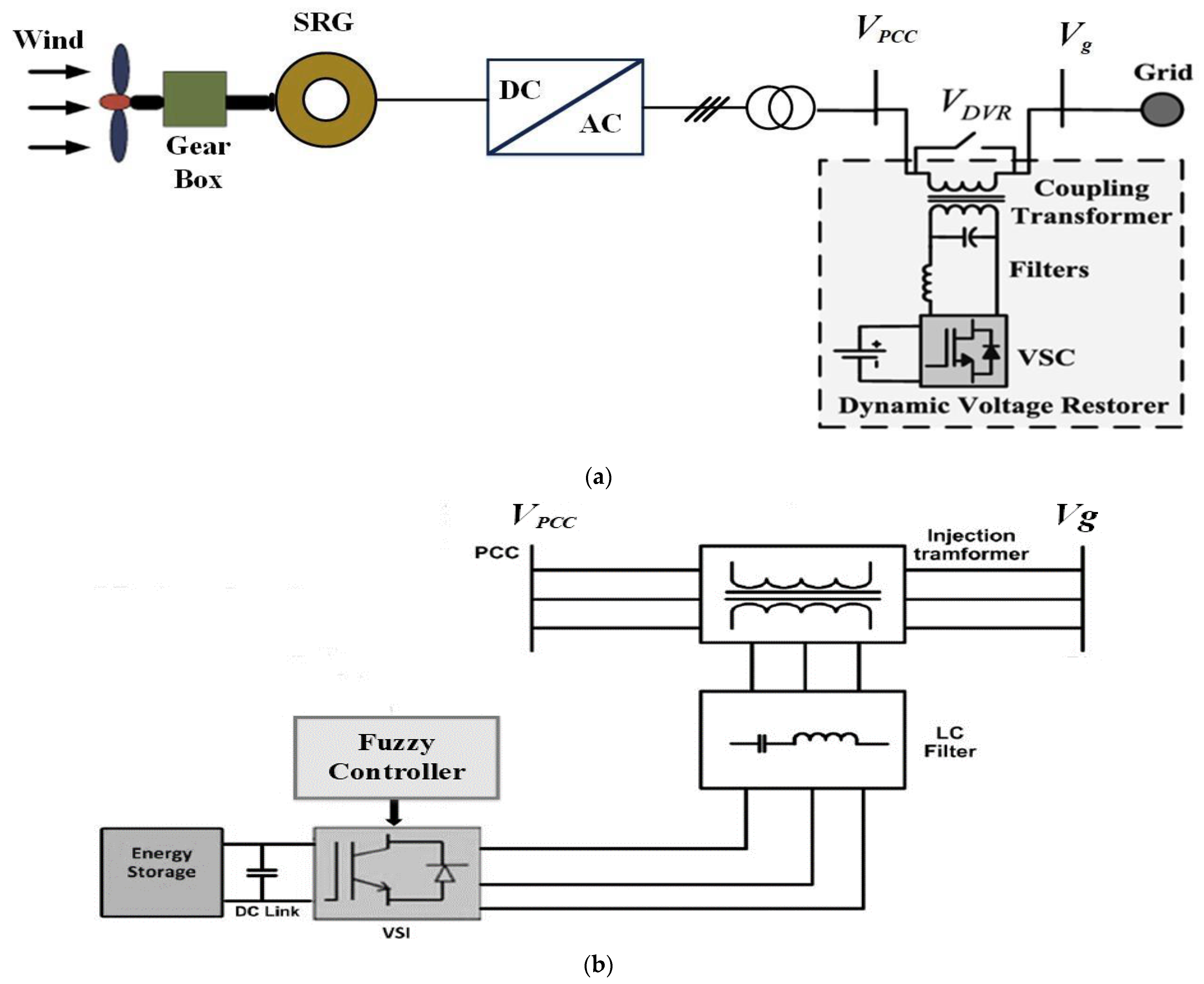
- To introduce a FRT capability enhancement using a DVR for a WT based on an SRG.
- To improve the stator voltage of an SRG during grid failures and implement the DVR to inject voltage at the PCC.
- To propose a control strategy using a FLC for the DVR to enhance the capability of LVRT and to accomplish the codes of the grid without disconnecting the turbine.
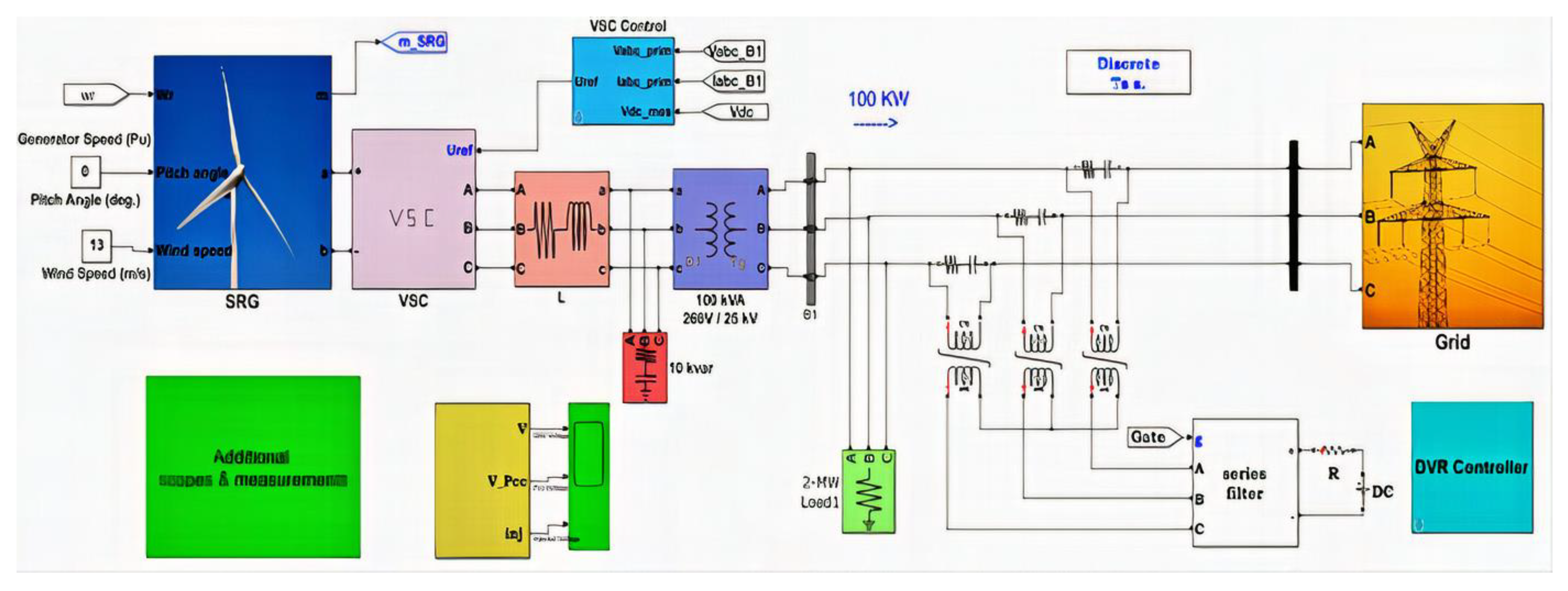
- To validate the effectiveness and enactment of the suggested methodology under four test scenarios.
2. Modelling of 12/8 SRG
3. DVR Modeling
4. Control Techniques of DVR
5. Fuzzy Control Strategy
6. Results and Discussion
- Scenario 1/Balanced sag of 0.5 p.u.
- Scenario 2/Unbalanced sag of 0.5 p.u.
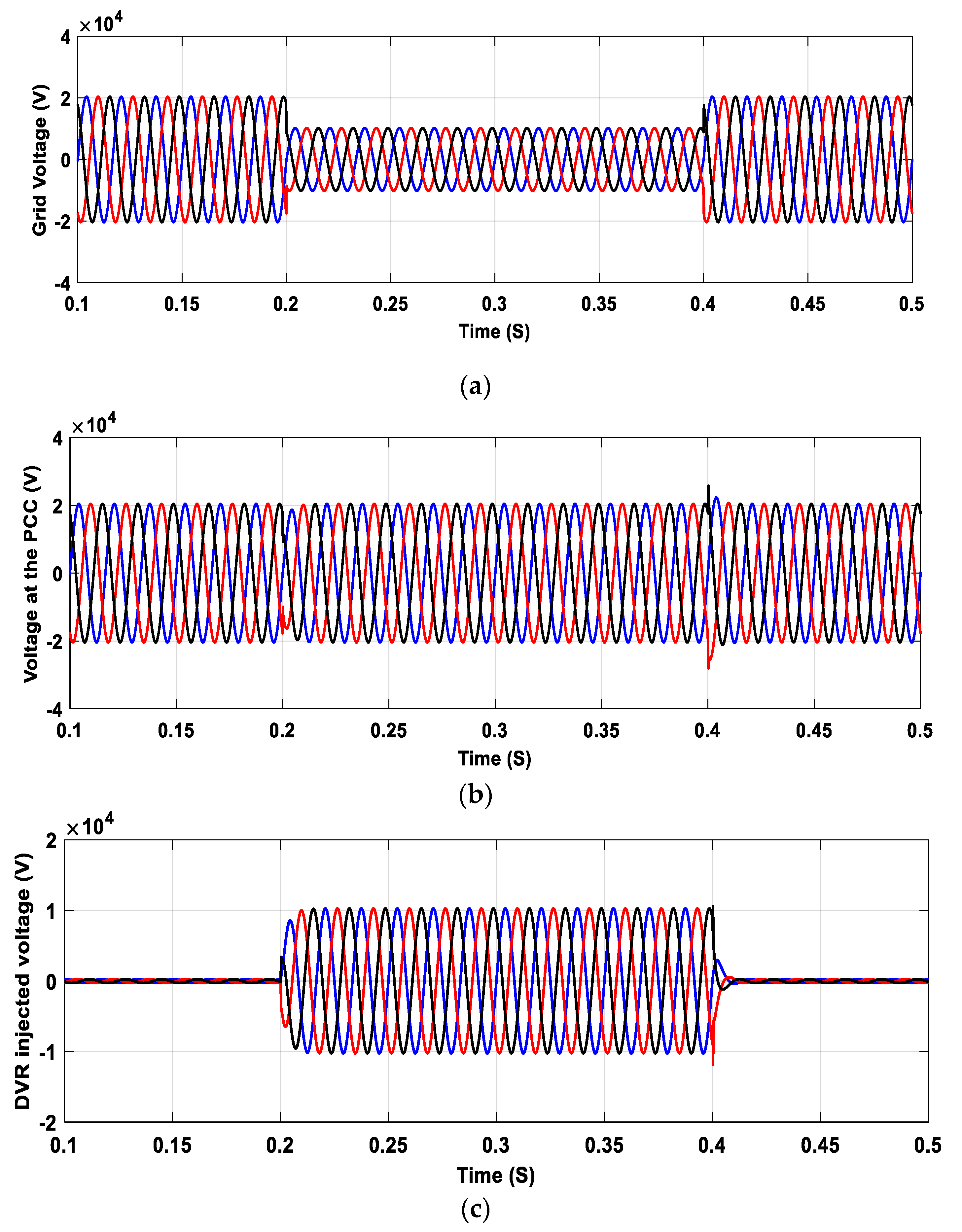
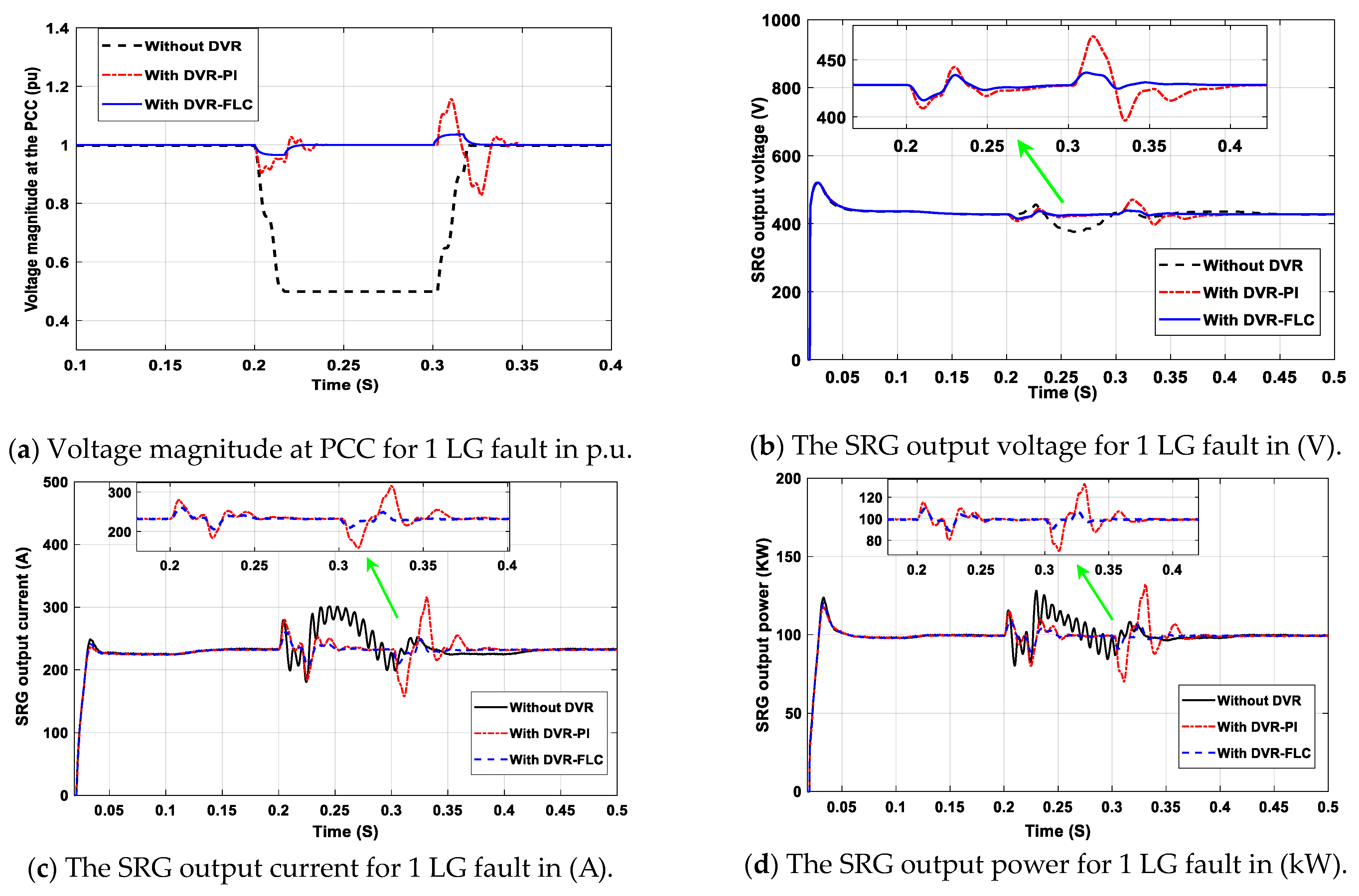
- Scenario 3/Single line—ground fault, 1 LG.
- Scenario 4/Analysis of harmonics spectrum.
6.1. Scenario 1: Balanced Voltage Sag
6.2. Scenario 2: Unbalanced Voltage Sag
6.3. Scenario 3: Single Line to Ground Fault (1 LG)
6.4. Scenario 4: Analysis of Harmonic Distortion
7. Conclusions and Future Work
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviations | |
| 1 LG | Single line to ground |
| CF | Constant frequency |
| CFDRG | Constant frequency (CF)-type double rotor generator |
| CFFFB | Combined feed-forward and feed-back |
| DFIG | Double-fed induction generator |
| DVR | Dynamic voltage restorer |
| ERC | Energy regulatory commission |
| FACTS | Series flexible ac transmission systems |
| FERC | Federal energy regulatory commission |
| FLC | Fuzzy logic controller |
| HVRT | High voltage ride-through. |
| LVRT | Low voltage ride-through. |
| MLI | Multi-level inverter |
| NB | Negative-big |
| NM | Negative-medium |
| NS | Negative-small |
| OCAMLI | Odd-nary cascaded asymmetric-type MLI |
| PB | Positive-big |
| PCC | Point of common coupling |
| PI | Proportional integral |
| PLL | Phase-locked loop |
| PM | Positive-medium |
| PS | Positive-small |
| PWM | Pulse-width modulation |
| SFCL | Super-conducting fault current limiters |
| SRG | Switched reluctance generator |
| STATCOM | Static synchronous compensator |
| TCVR | Thyristor-controlled voltage regulator |
| THD | Total harmonic distortion |
| VSI | Voltage source inverter |
| WT | Wind turbine |
| ZE | Zero |
| Parameters | |
| Cs | Series capacitor |
| ij | Current of phase j |
| IL | Load current for RMS |
| IL | Current of load prior sag |
| I’L | Load current after sag |
| Lj | Self-inductance of phase j |
| Ns | Number of motor phases |
| PDVR | DVR compensation power |
| Pg | Load active power rating |
| PL | Load active power rating |
| Pout | Output power |
| R | Winding resistance per phase |
| Rs | Series resistor with a capacitor bank |
| SDVR | DVR apparent power rating |
| T | Conduction period |
| VDVR | DVR compensation voltage |
| RMS injected voltage of DVR in phase k | |
| Vg | Grid voltage |
| V’g | Grid voltage |
| vj | The voltage of phase j |
| VL | Voltage of load |
| V’L | Load voltage |
| θ | Position of the rotor related to the aligned position (θ = 0o). |
| λj | Flux linkage of phase j |
| The difference phase angle between load voltage and load current |
References
- Wu, Z.; Zhu, C.; Hu, M. Improved Control Strategy for DFIG Wind Turbines for Low Voltage Ride Through. Energies 2013, 6, 1181–1197. [Google Scholar] [CrossRef] [Green Version]
- Gao, D.W.; Muljadi, E.; Tian, T.; Miller, M.; Wang, W. Comparison of Standards and Technical Requirements of Grid-Connected Wind Power Plants in China and the United States; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2016; Volume 50, pp. 553–561. [Google Scholar] [CrossRef] [Green Version]
- Robert, B.; Brown, E.B. United States of America Joint Report of the North American Electric Reliability. Available online: https://www.federalregister.gov/documents/2023/04/24/2023-08610/north-american-electric-reliability-corporation-joint-federal-state-task-force-on-electric (accessed on 19 May 2023).
- Bahy, M.; Nada, A.S.; Elbanna, S.H.; Shanab, M.A.M. Voltage control of switched reluctance generator using grasshopper optimization algorithm. Int. J. Power Electron. Drive Syst. (IJPEDS) 2020, 11, 75–85. [Google Scholar] [CrossRef] [Green Version]
- Rahmanian, E.; Akbari, H.; Sheisi, G.H. Maximum Power Point Tracking in Grid Connected Wind Plant by Using Intelligent Controller and Switched Reluctance Generator. IEEE Trans. Sustain. Energy 2017, 8, 1313–1320. [Google Scholar] [CrossRef]
- Energy, G. Technical Requirements for Wind Generation Interconnection and Integration. N. Engl. Wind. Integr. Study 2009, 3, 1–128. [Google Scholar]
- Chen, X.; Yan, L.; Zhou, X.; Sun, H. A Novel DVR-ESS-Embedded Wind-Energy Conversion System. IEEE Trans. Sustain. Energy 2018, 9, 1265–1274. [Google Scholar] [CrossRef]
- Liasi, S.G.; Afshar, Z.; Harandi, M.J.; Kojori, S.S. An Improved Control Strategy for DVR in order to Achieve both LVRT and HVRT in DFIG Wind Turbine. In Proceedings of the 10th International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 724–730. [Google Scholar] [CrossRef]
- Ghorbanian, M.J.; Goodarzvand, F.; Pourdaryaei, A.; Mahadi, W.N.L. Mitigating voltage sag by implementing STATCOM on DFIG-based wind farms connected to a power system. In Proceedings of the 4th International Conference on Engineering Technology and Technopreneuship (ICE2T), Kuala Lumpur, Malaysia, 27–29 August 2014; pp. 131–136. [Google Scholar] [CrossRef]
- Molinas, M.; Suul, J.A.; Undeland, T. Low Voltage Ride Through of Wind Farms with Cage Generators: STATCOM Versus SVC. IEEE Trans. Power Electron. 2008, 23, 1104–1117. [Google Scholar] [CrossRef]
- Jerin, A.R.A.; Prabaharan, N.; Palanisamy, K.; Umashankar, S. FRT Capability in DFIG based Wind Turbines using DVR with Combined Feed-Forward and Feed-Back Control. Energy Procedia 2017, 138, 1184–1189. [Google Scholar] [CrossRef]
- Wessels, C.; Gebhardt, F.; Fuchs, F.W. Fault Ride-Through of a DFIG Wind Turbine Using a Dynamic Voltage Restorer during Symmetrical and Asymmetrical Grid Faults. IEEE Trans. Power Electron. 2011, 26, 807–815. [Google Scholar] [CrossRef] [Green Version]
- Hasanien, H.; Muyeen, S.; Al-Durra, A. Adaptive Control Strategy for Low Voltage Ride Through Capability Enhancement of a Grid-Connected Switched Reluctance Wind Generator. In Proceedings of the 5th IET International Conference on Renewable Power Generation (RPG) 2016, IET, London, UK, 21–23 September 2016; pp. 1–6. [Google Scholar] [CrossRef] [Green Version]
- Farhadi-Kangarlu, M.; Babaei, E.; Blaabjerg, F. A comprehensive review of dynamic voltage restorers. Int. J. Electr. Power Energy Syst. 2017, 92, 136–155. [Google Scholar] [CrossRef]
- Asadi, P. Development and Application of an Advanced Switched Reluctance Generator Drive; Texas A&M University: College Station, TX, USA, 2006. [Google Scholar]
- Falehi, A.; Rafiee, M. Enhancement of DFIG-Wind Turbine’s LVRT capability using novel DVR based Odd-nary Cascaded Asymmetric Multi-Level Inverter. Eng. Sci. Technol. Int. J. 2017, 20, 805–824. [Google Scholar] [CrossRef]
- Falehi, A.D.; Torkaman, H. Promoted supercapacitor control scheme based on robust fractional-order super-twisting sliding mode control for dynamic voltage restorer to enhance FRT and PQ capabilities of DFIG-based wind turbine. J. Energy Storage 2021, 42, 102983. [Google Scholar] [CrossRef]
- Din, Z.; Zhang, J.; Xu, Z.; Zhang, Y.; Zhao, J. Realization of fault ride through for doubly fed induction generator system with cascade converter. Int. Trans. Electr. Energy Syst. 2021, 31, e12792. [Google Scholar] [CrossRef]
- Chhipą, A.A.; Chakrabarti, P.; Bolshev, V.; Chakrabarti, T.; Samarin, G.; Vasilyev, A.N.; Ghosh, S.; Kudryavtsev, A. Modeling and Control Strategy of Wind Energy Conversion System with Grid-Connected Doubly-Fed Induction Generator. Energies 2022, 15, 6694. [Google Scholar] [CrossRef]
- Din, Z.; Su, D.; Zhang, J.; Xu, Z. Operation and Evaluation of Wind Power Generation System with Constant Frequency Double Rotor Generator. In Proceedings of the 2020 7th International Conference on Electrical and Electronics Engineering (ICEEE), Antalya, Turkey, 14–16 April 2020; pp. 130–136. [Google Scholar]
- Touati, Z.; Pereira, M.; Araújo, R.E.; Khedher, A. Integration of Switched Reluctance Generator in a Wind Energy Conversion System: An Overview of the State of the Art and Challenges. Energies 2022, 15, 4743. [Google Scholar] [CrossRef]
- Ramkumar, M.; Latha, K. Analysis of Maximizing the Power Output of Switched Reluctance Generator Using Different Core Materials. Adv. Mater. Sci. Eng. 2023, 2023, 8539809. [Google Scholar] [CrossRef]
- Reis, M.R.C.; Calixto, W.P.; Araujo, W.R.H.; Matias, C.A. Increasing efficiency of the switched reluctance generator using parametric regression and optimization methods. In Proceedings of the 18th International Scientific Conference on Electric Power Engineering (EPE), Kouty nad Desnou, Czech, 17–19 May 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Berker, B.; Jiang, J.W.; Emadi, A. (Eds.) Switched Reluctance Motor Drives Fundamentals to Applications, 1st ed; CRC Press: Boca Raton, FL, USA, 2018; ISBN 9781138304598. [Google Scholar] [CrossRef]
- Gonzalez, M.; Cardenas, V.; Moran, L.; Espinoza, J. Selecting between linear and nonlinear control in a dynamic voltage restorer. Simul. Model. Pract. Theory 2014, 47, 221–235. [Google Scholar] [CrossRef]
- González, M.; Cárdenas, V.; Espinosa, G. Advantages of the passivity based control in dynamic voltage restorers for power quality improvement. Simul. Model. Pract. Theory 2014, 47, 221–235. [Google Scholar] [CrossRef]
- Sindi, H.F.; Alghamdi, S.; Rawa, M.; Omar, A.I.; Elmetwaly, A.H. Robust control of adaptive power quality compensator in Multi-Microgrids for power quality enhancement using puzzle optimization algorithm. Ain Shams Eng. J. 2023, 14, 102047. [Google Scholar] [CrossRef]
- Omar, A.I.; Aleem, S.H.A.; El-Zahab, E.E.; Algablawy, M.; Ali, Z. An improved approach for robust control of dynamic voltage restorer and power quality enhancement using grasshopper optimization algorithm. ISA Trans. 2019, 95, 110–129. [Google Scholar] [CrossRef]
- Abu Hussein, A.; Ali, M.H. Comparison among series compensators for transient stability enhancement of doubly fed induction generator based variable speed wind turbines. IET Renew. Power Gener. 2016, 10, 116–126. [Google Scholar] [CrossRef]
- Mohsen, S.E.A.; Ibrahim, A.M.; Elbarbary, Z.M.S.; Omar, A.I. Unified Power Quality Conditioner Using Recent Optimization Technique: A Case Study in Cairo Airport, Egypt. Sustainability 2023, 15, 3710. [Google Scholar] [CrossRef]
- Aldin, N.A.N.; Abdellatif, W.S.E.; Elbarbary, Z.M.S.; Omar, A.I.; Mahmoud, M.M. Robust Speed Controller for PMSG Wind System Based on Harris Hawks Optimization via Wind Speed Estimation: A Real Case Study. IEEE Access 2023, 11, 5929–5943. [Google Scholar] [CrossRef]
- Rashid, G.; Ali, M.H. Nonlinear Control-Based Modified BFCL for LVRT Capacity Enhancement of DFIG-Based Wind Farm. IEEE Trans. Energy Convers. 2017, 32, 284–295. [Google Scholar] [CrossRef]
- Benali, A.; Khiat, M.; Allaoui, T.; Denai, M. Power Quality Improvement and Low Voltage Ride Through Capability in Hybrid Wind-PV Farms Grid-Connected Using Dynamic Voltage Restorer. IEEE Access 2018, 6, 68634–68648. [Google Scholar] [CrossRef]
- Yahiya, M.A.A.; Uzair, M.A.R. Performance analysis of DVR, DSTATCOM and UPQC For improving the power quality with various control strategies. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007; pp. 1–8. [Google Scholar]
- Sakar, S.; Balci, M.E.; Aleem, S.H.E.A.; Zobaa, A.F. Hosting capacity assessment and improvement for photovoltaic-based distributed generation in distorted distribution networks. In Proceedings of the IEEE 16th International Conference on Environment and Electrical Engineering (EEEIC), Florence, Italy, 7–10 June 2016; pp. 1–6. [Google Scholar]
- IEEE Std. 519-2014; IEEE Recommended Practice and Requirements for Harmonic Control in Electric Power Systems. IEEE Std.: Piscataway, NJ, USA, 2014.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DVR Data [27] | Values | SRG Data [4] | Values |
|---|---|---|---|
| VDC | 2000 V | Vr | 500 V |
| R | 0.8 Ω | T | 500 N.m |
| VSI | 3 arms, 6 pulses | Po | 110 kw |
| Carrier frequency | 4500 Hz | Ns | 12 |
| Shunt filter resistance | 50 Ω | Nr | 8 |
| Shunt filter capacitance | 5 µF | base speed | 1150 r.p.m |
| series filter inductance | 75 mH | Rj | 0.025 Ω |
| series filter resistance | 0.9 Ω | J | 0.04 kg.m2 |
| ratio of Boosting transformer | 1:1 | B | 0.03 N.m.s |
| Fault Type | THD % Values | Without DVR | DVR-PI | DVR-FLC |
|---|---|---|---|---|
| Sag mode | PCC voltage | 20.39% | 5.15% | 2.73% |
| PCC current | 9.48% | 7.57% | 4.65% | |
| 1 LG fault | PCC voltage | 30.36% | 18.34% | 2.38% |
| PCC current | 21% | 11.28% | 3.12% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
AlGhamdi, S.A. Improvement of Fault Ride-Through Capability of Grid Connected Wind Turbine Based on a Switched Reluctance Generator Using a Dynamic Voltage Restorer. Sustainability 2023, 15, 11061. https://doi.org/10.3390/su151411061
AlGhamdi SA. Improvement of Fault Ride-Through Capability of Grid Connected Wind Turbine Based on a Switched Reluctance Generator Using a Dynamic Voltage Restorer. Sustainability. 2023; 15(14):11061. https://doi.org/10.3390/su151411061
Chicago/Turabian StyleAlGhamdi, Saeed A. 2023. "Improvement of Fault Ride-Through Capability of Grid Connected Wind Turbine Based on a Switched Reluctance Generator Using a Dynamic Voltage Restorer" Sustainability 15, no. 14: 11061. https://doi.org/10.3390/su151411061