
RBF Neural Network Fractional-Order Sliding Mode Control with an Application to Direct a Three Matrix Converter under an Unbalanced Grid

Abstract
:1. Introduction
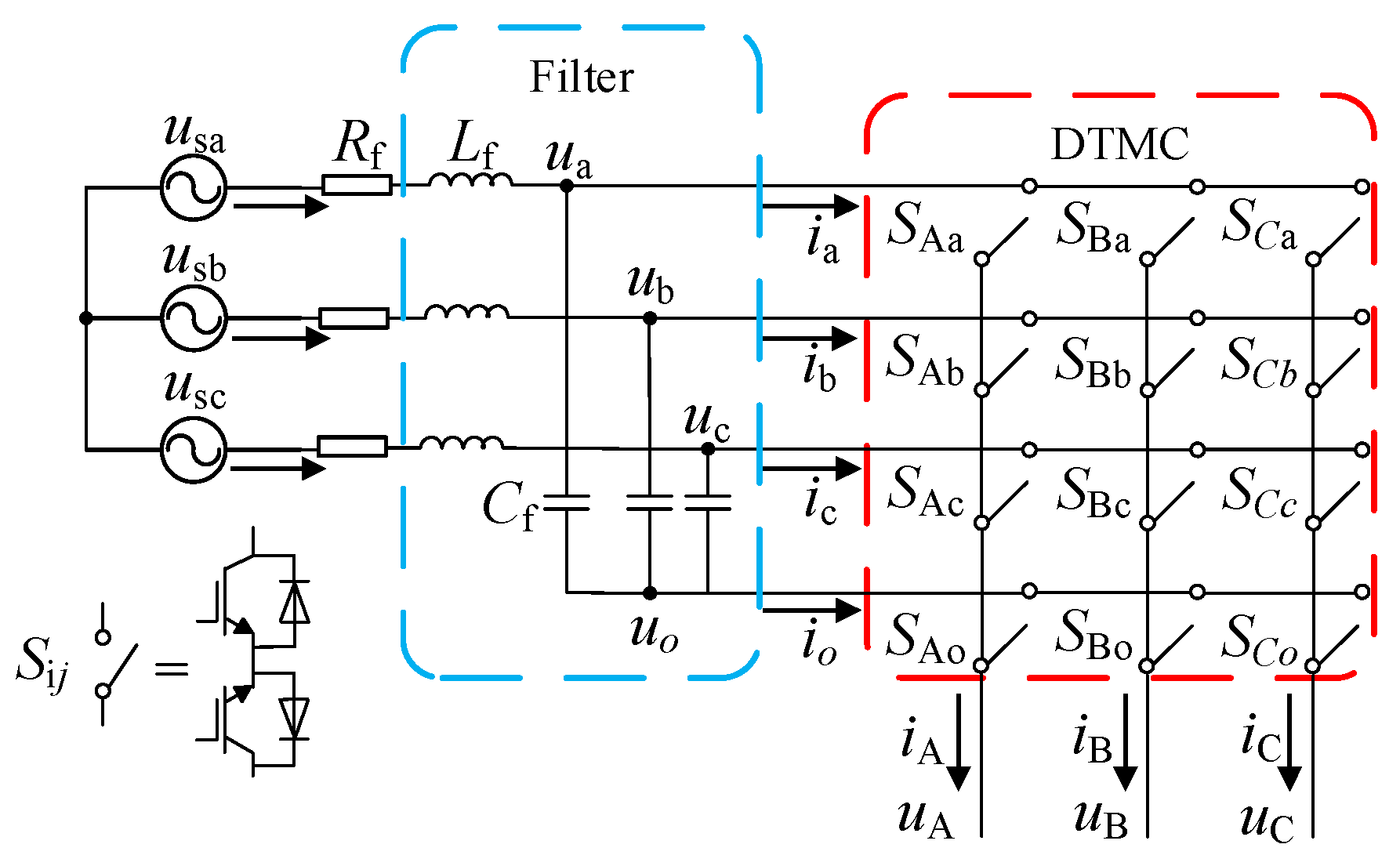
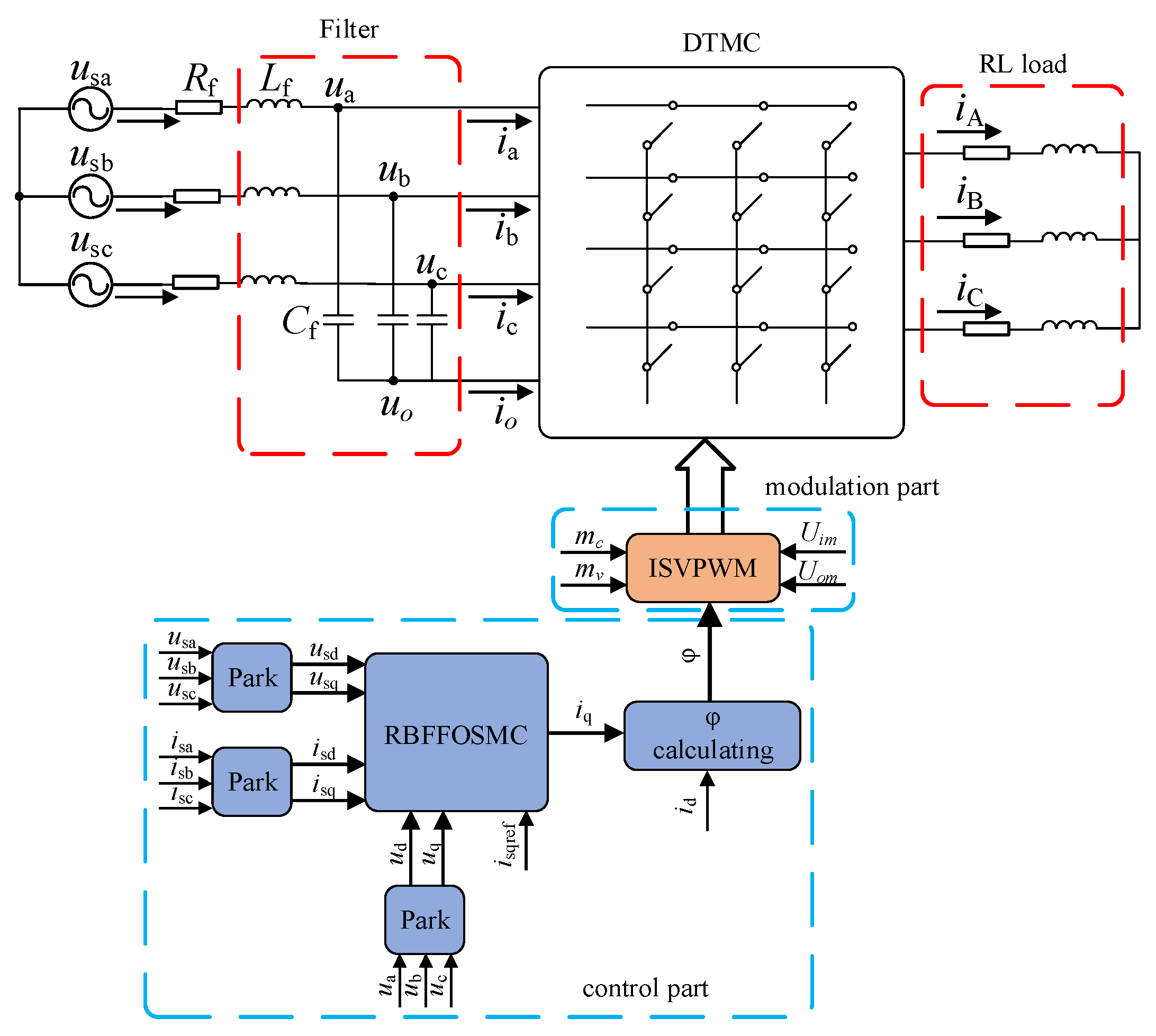
2. The Topology and Modulation Scheme of the DTMC
2.1. Topology of the DTMC
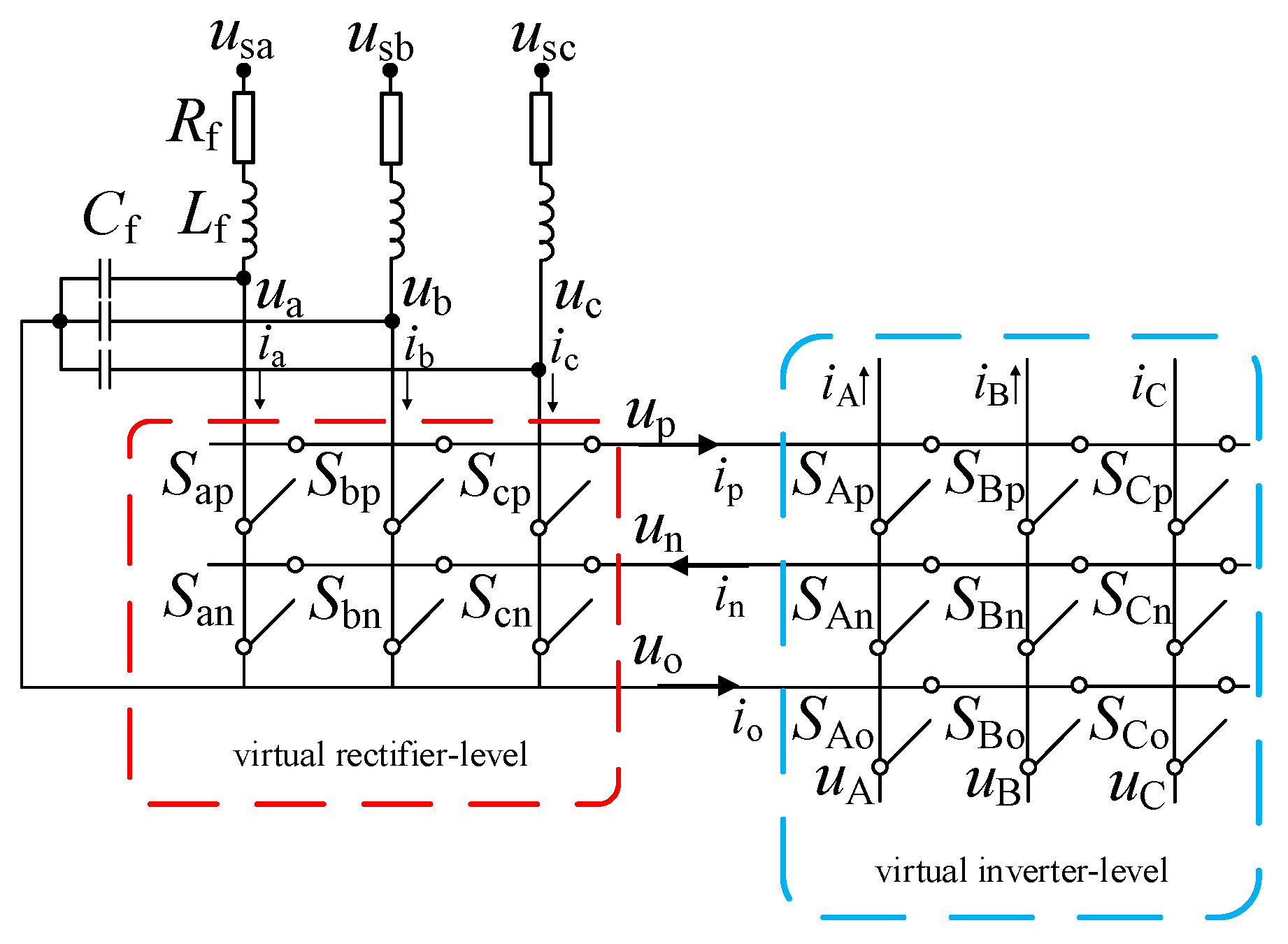
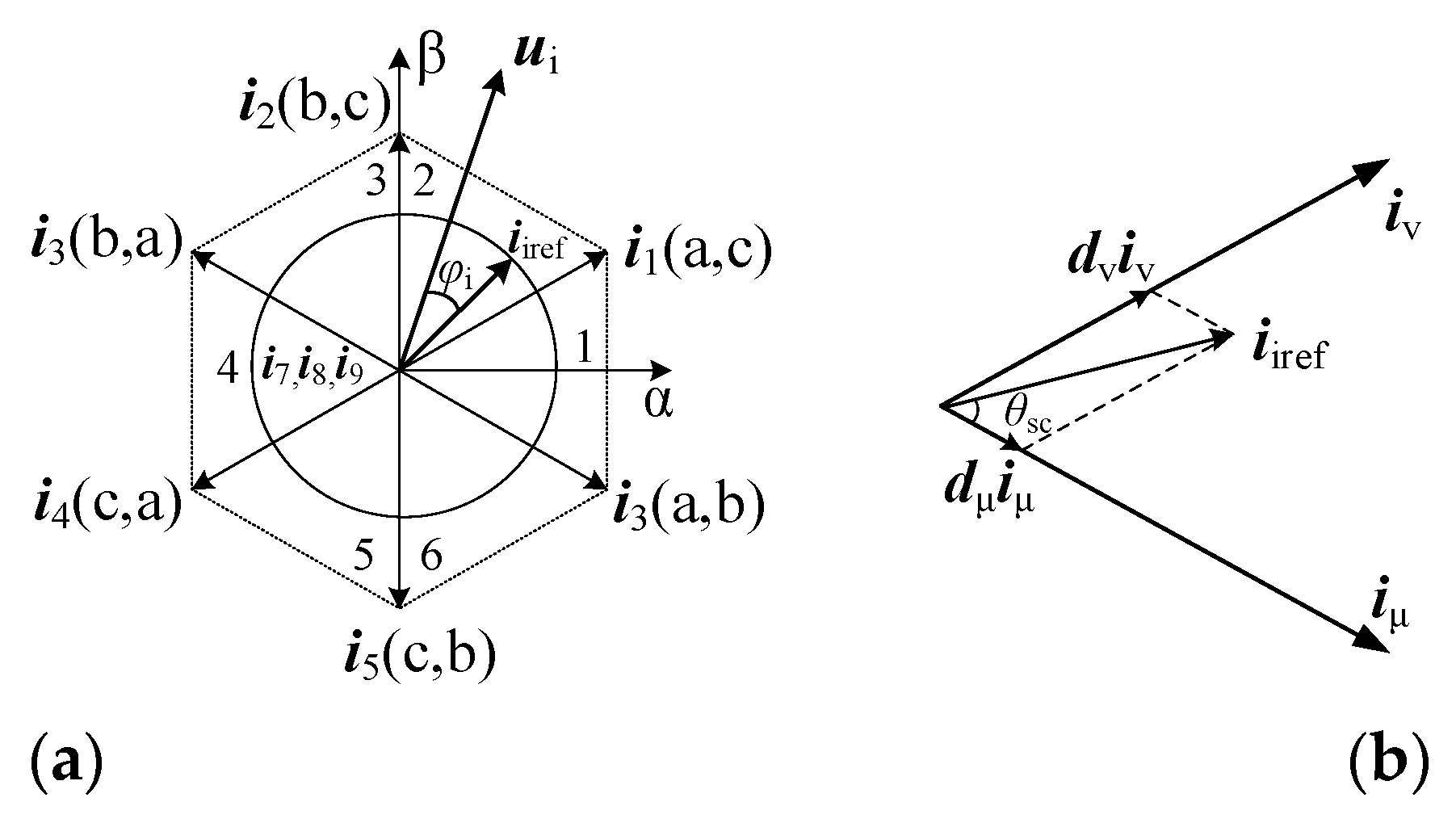
2.2. DTMC Modulation Algorithm
3. Instantaneous Power and Voltage Compensation under Unbalanced Grids
3.1. Instantaneous Power of the DTMC
3.2. Output Voltage Compensation
4. RBF Neural Network Fractional-Order Sliding Mode Controller
4.1. Mathematical Models of the DTMC
4.2. Fractional-Order SMC
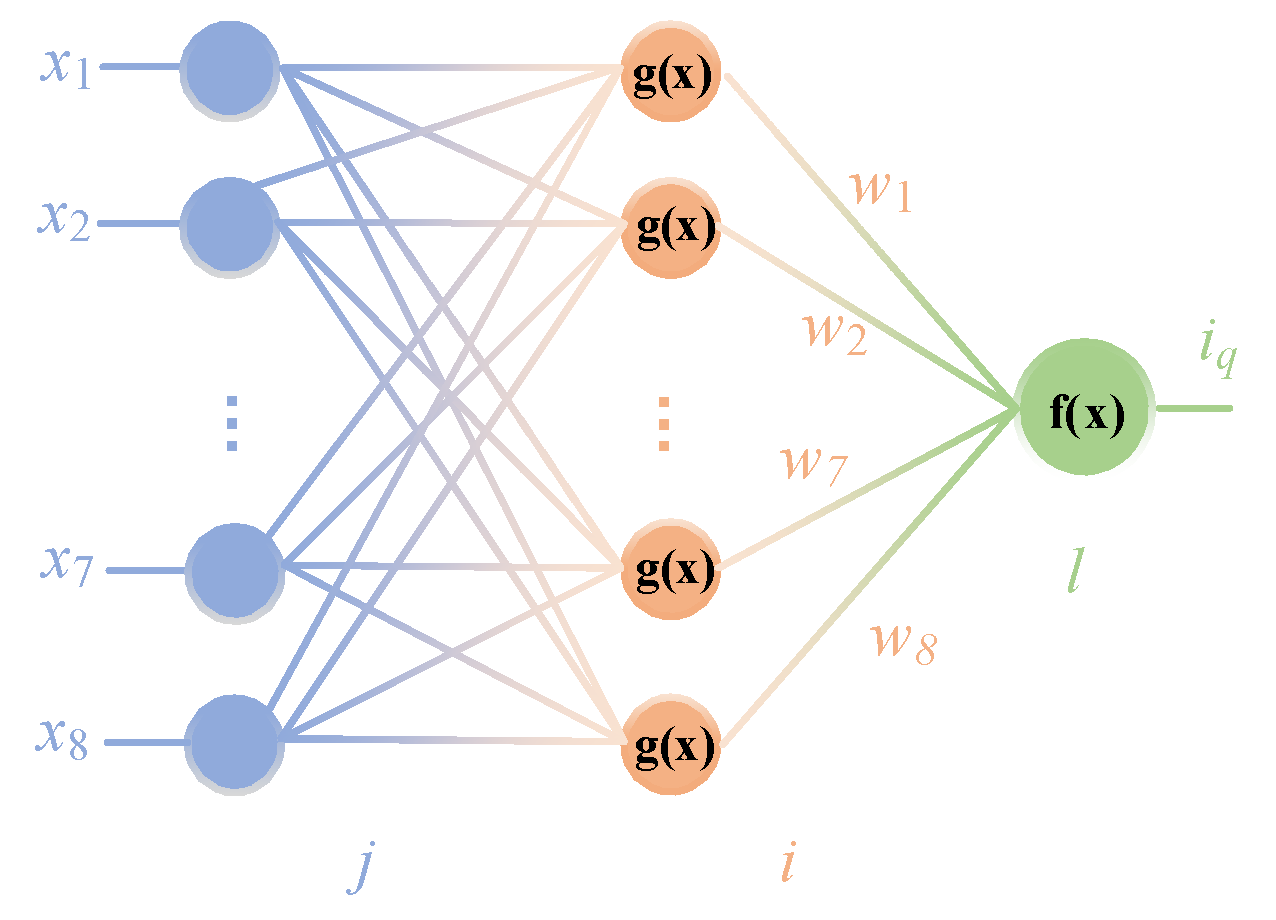
4.3. RBF Neural Network
5. Simulation and Experiment Results
5.1. Simulation
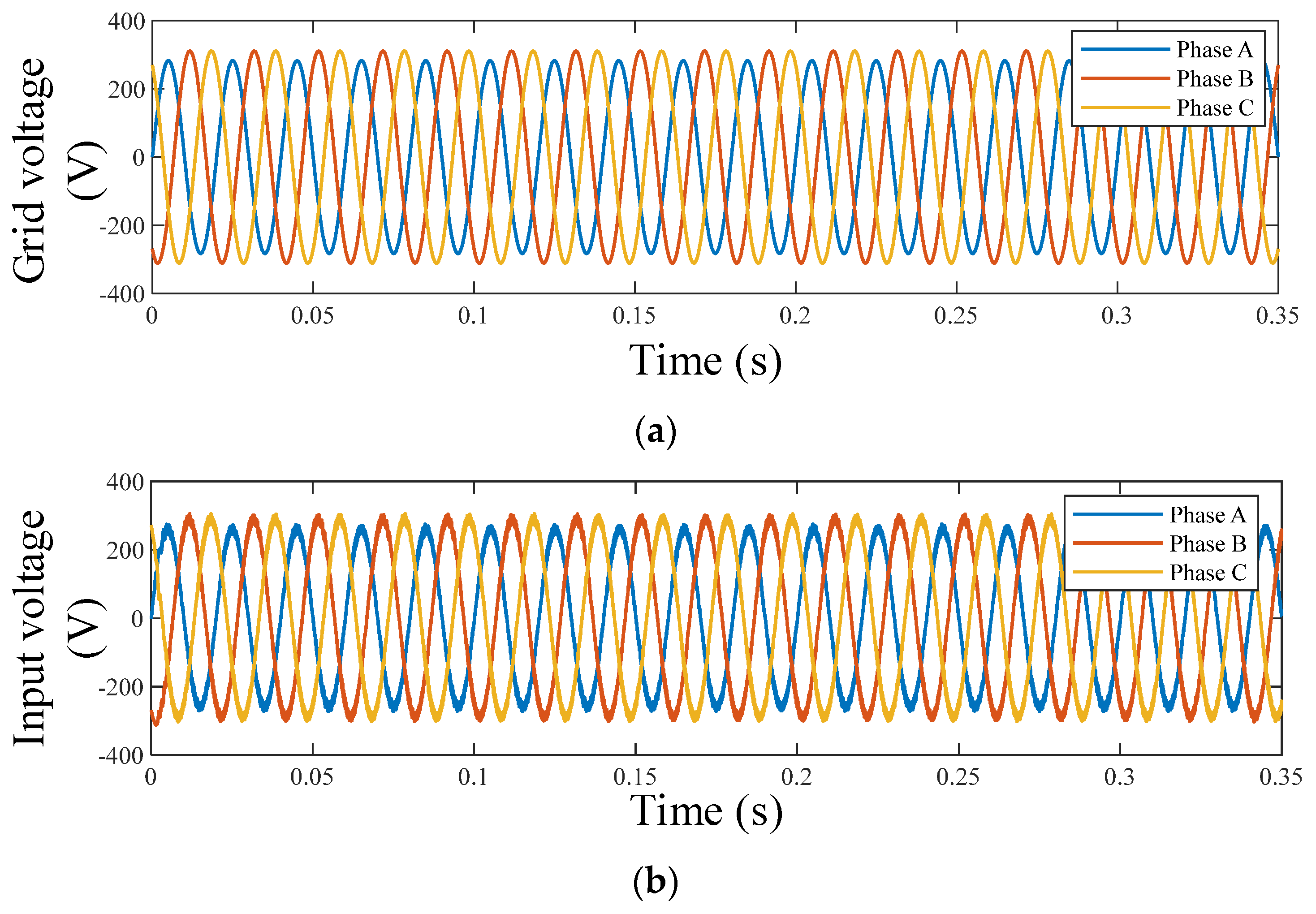
5.1.1. Imbalance Analysis
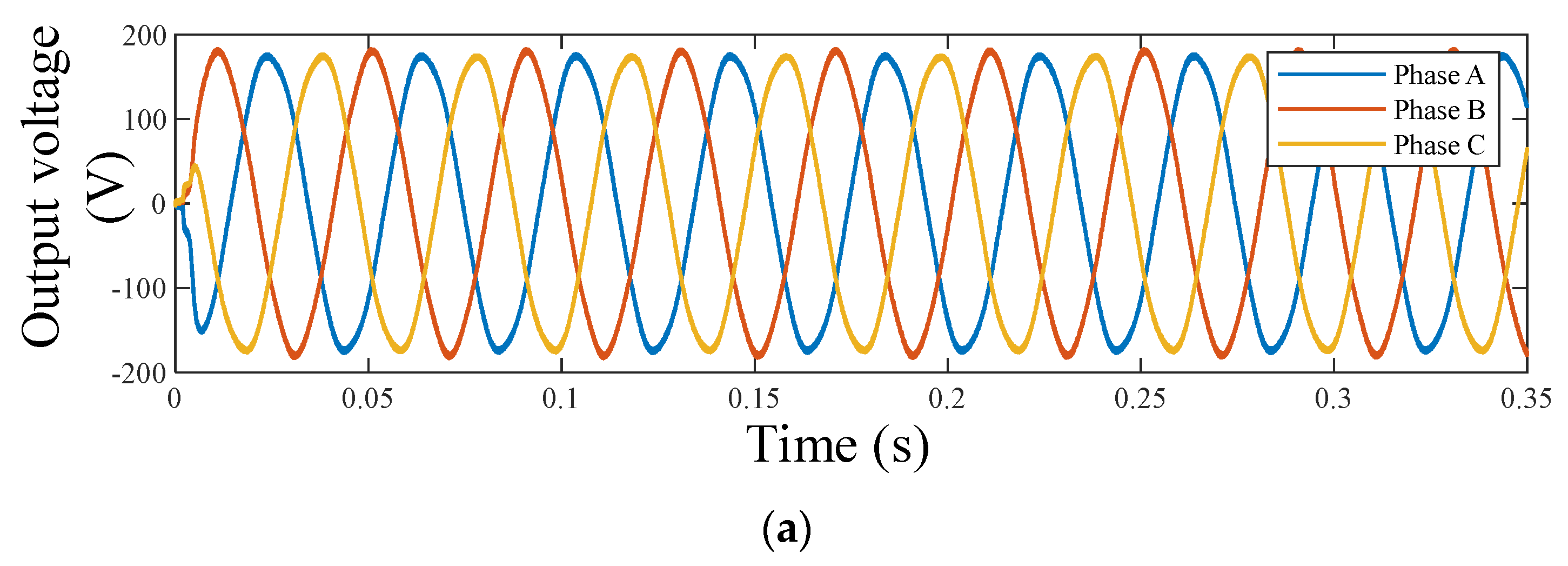
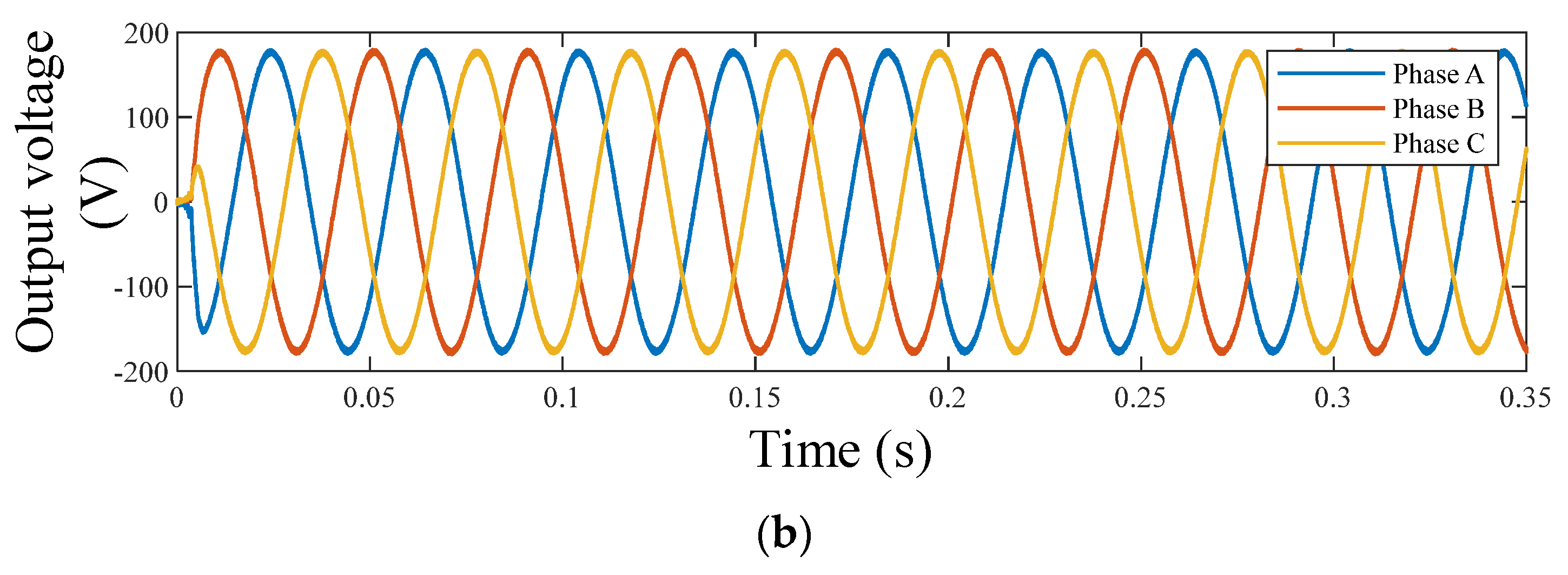
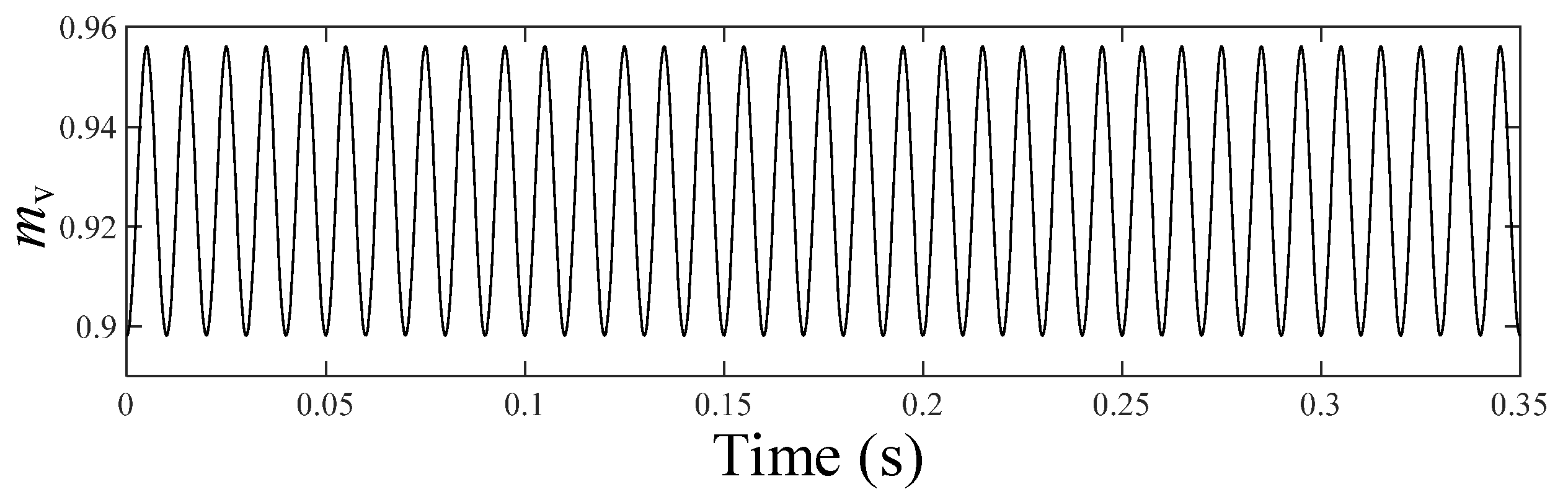
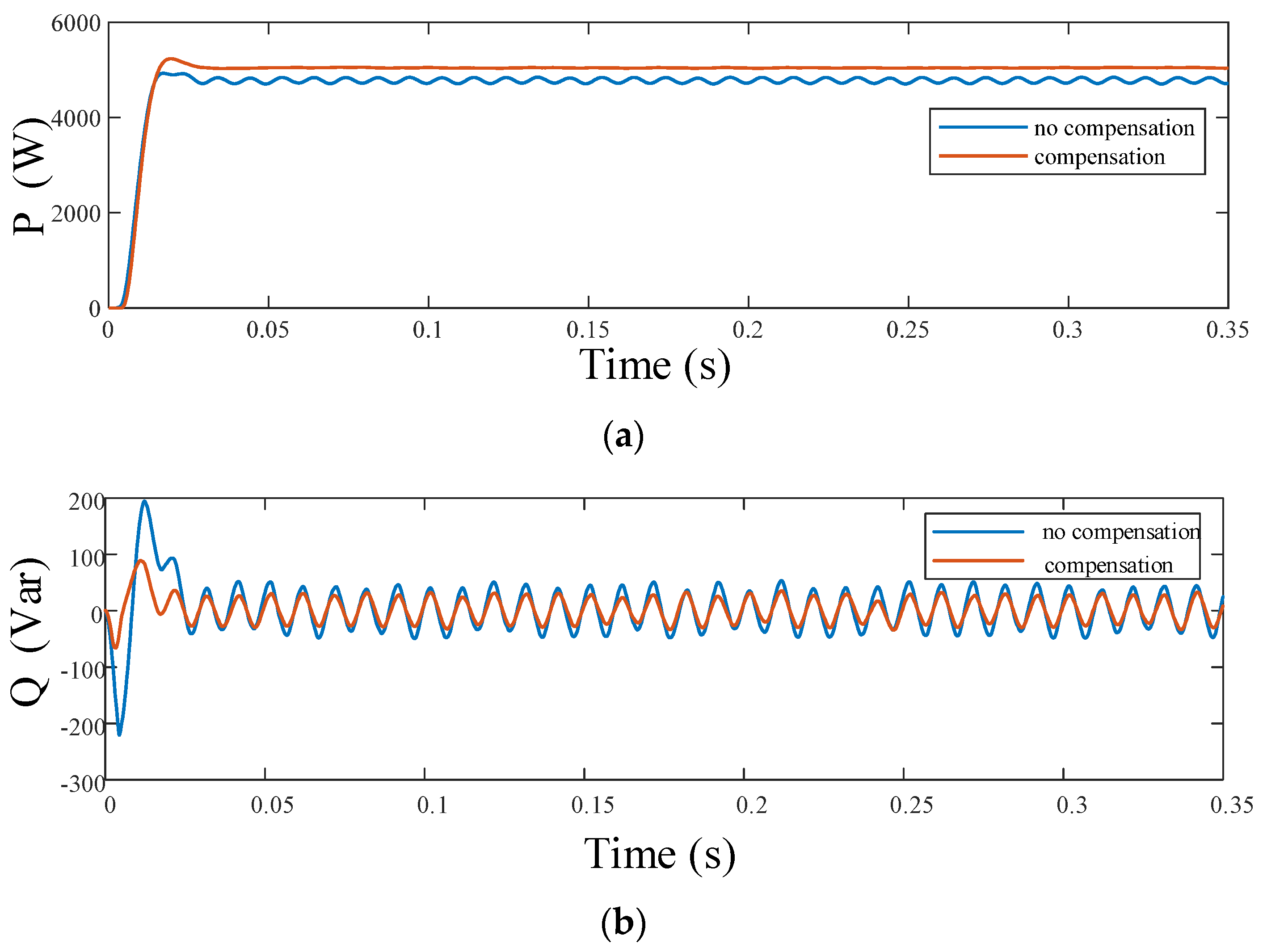
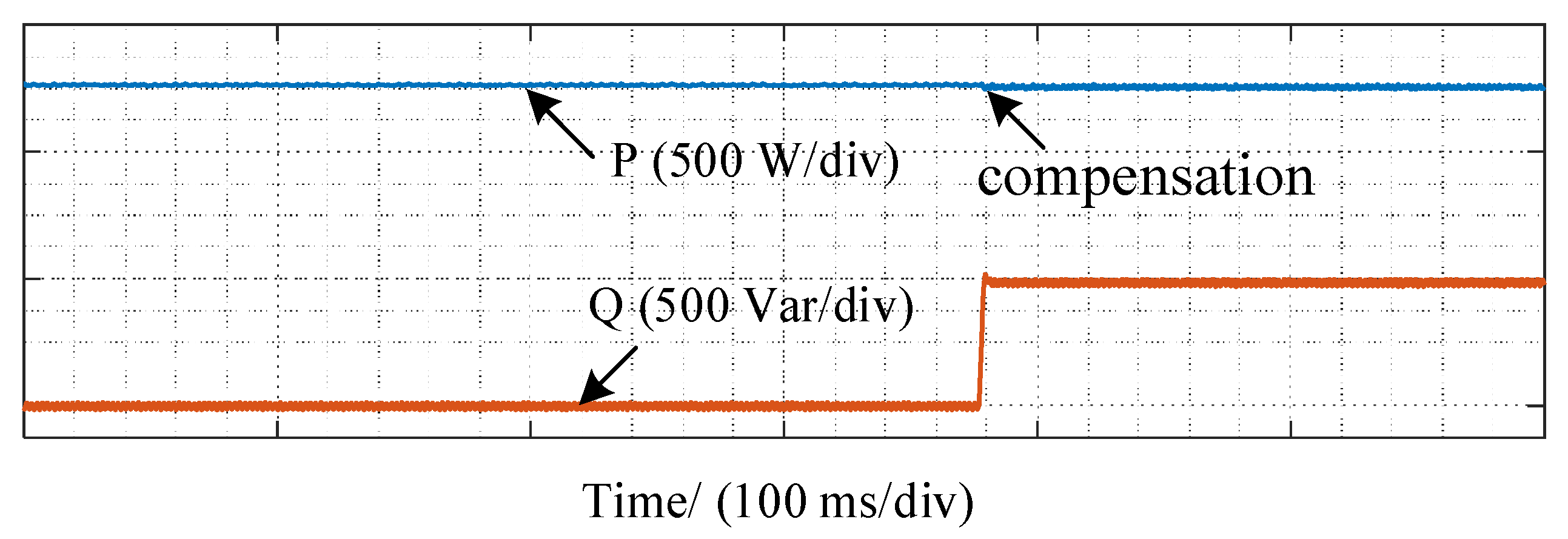
5.1.2. Output Compensation Analysis
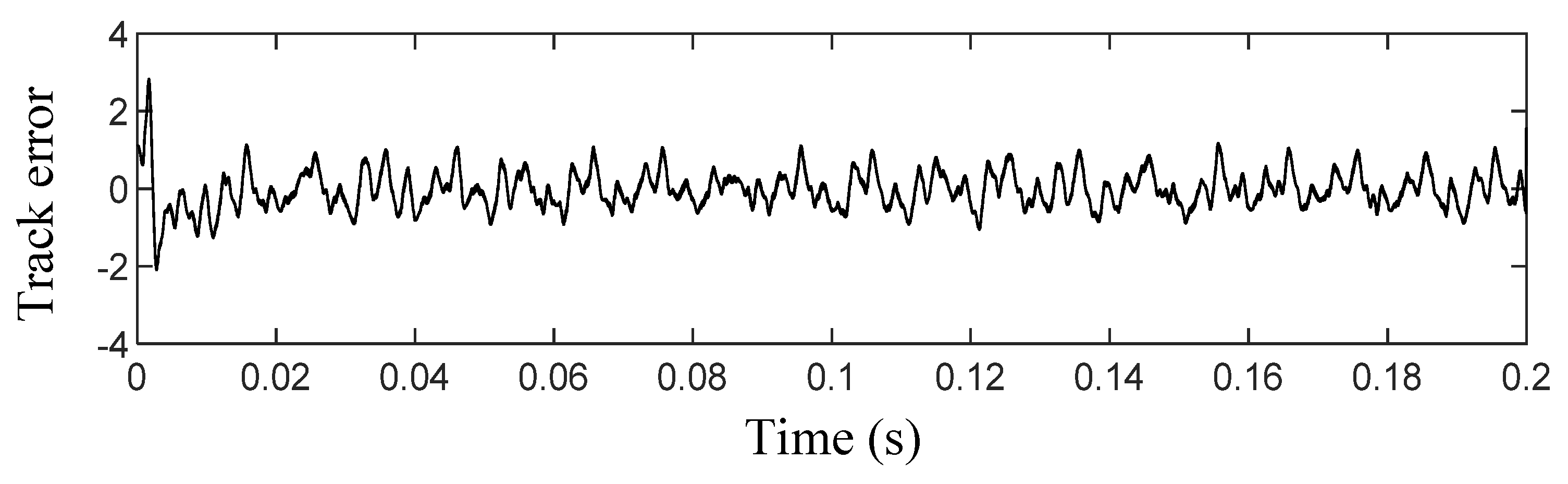
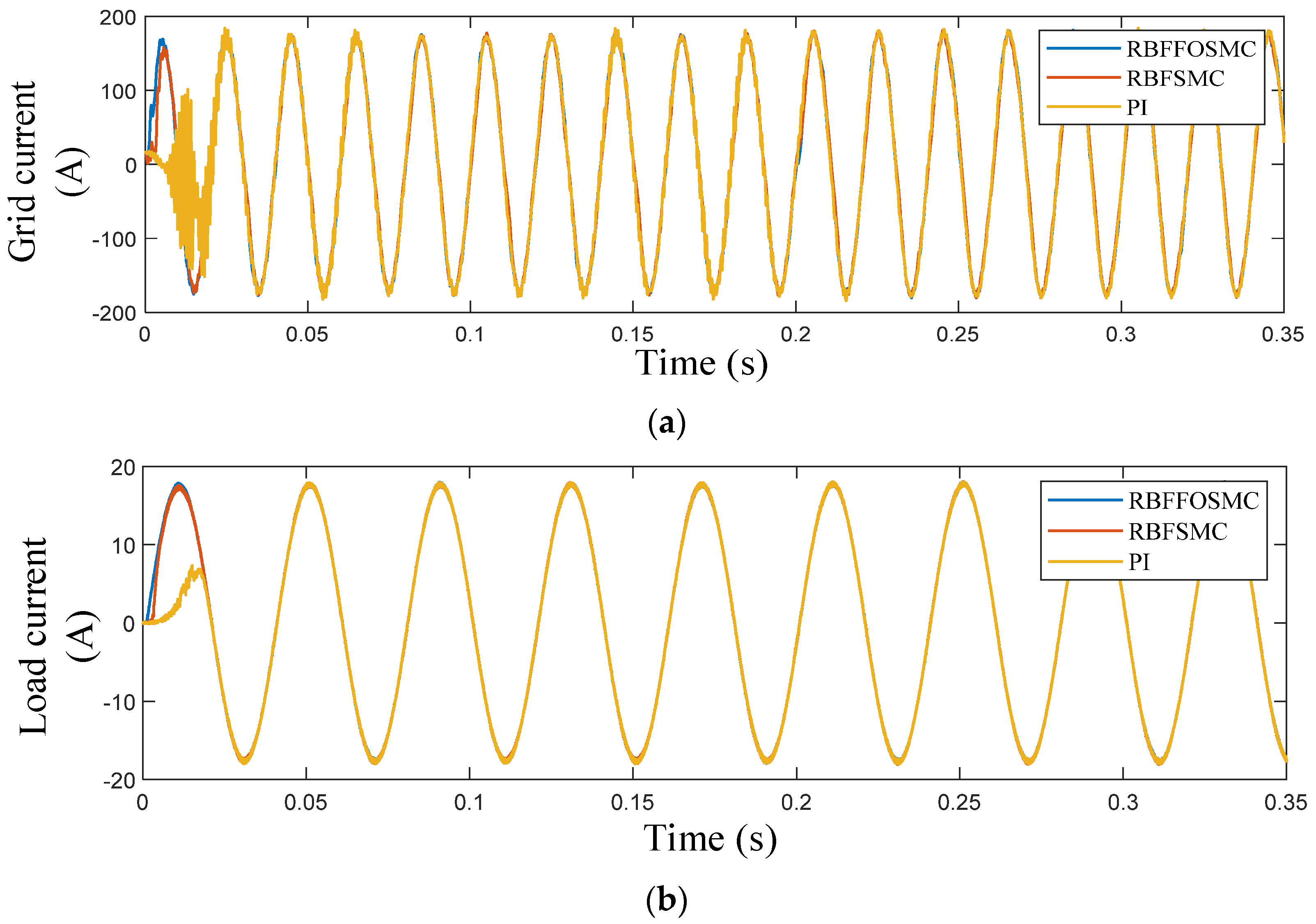
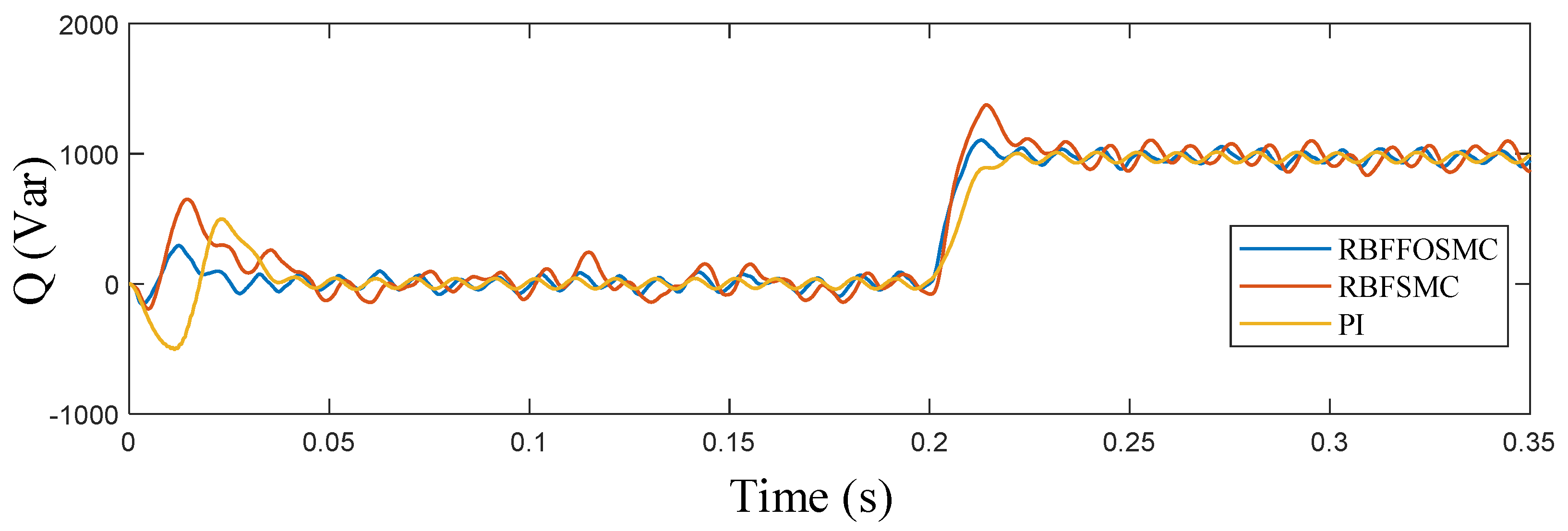
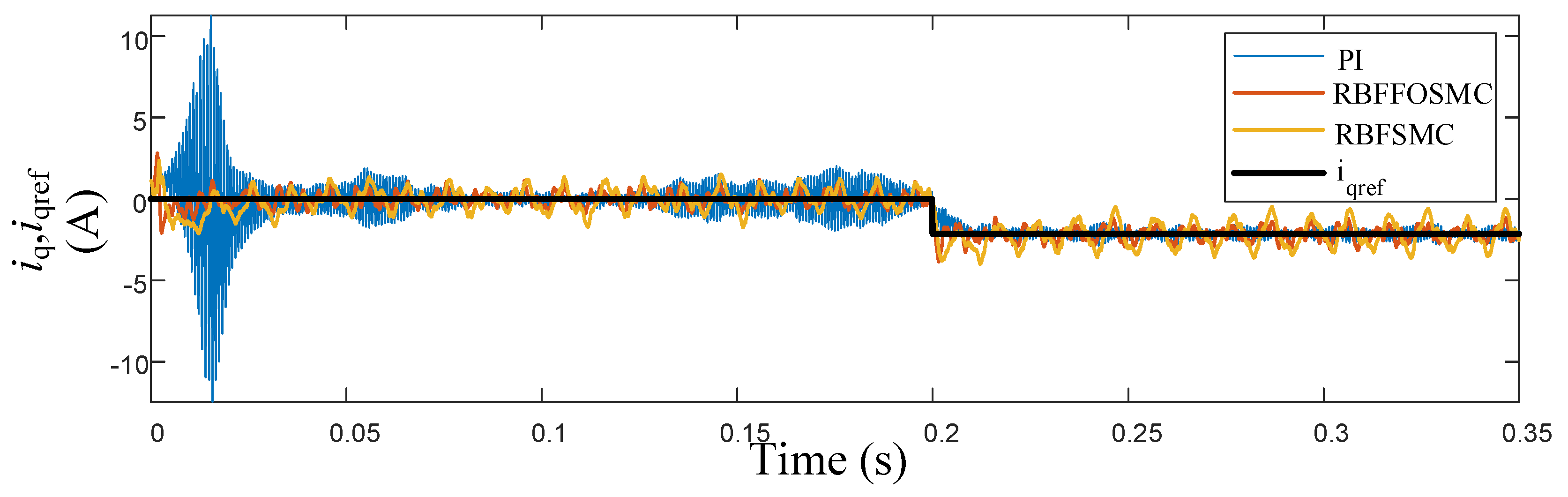
5.1.3. Controller Performance Analysis
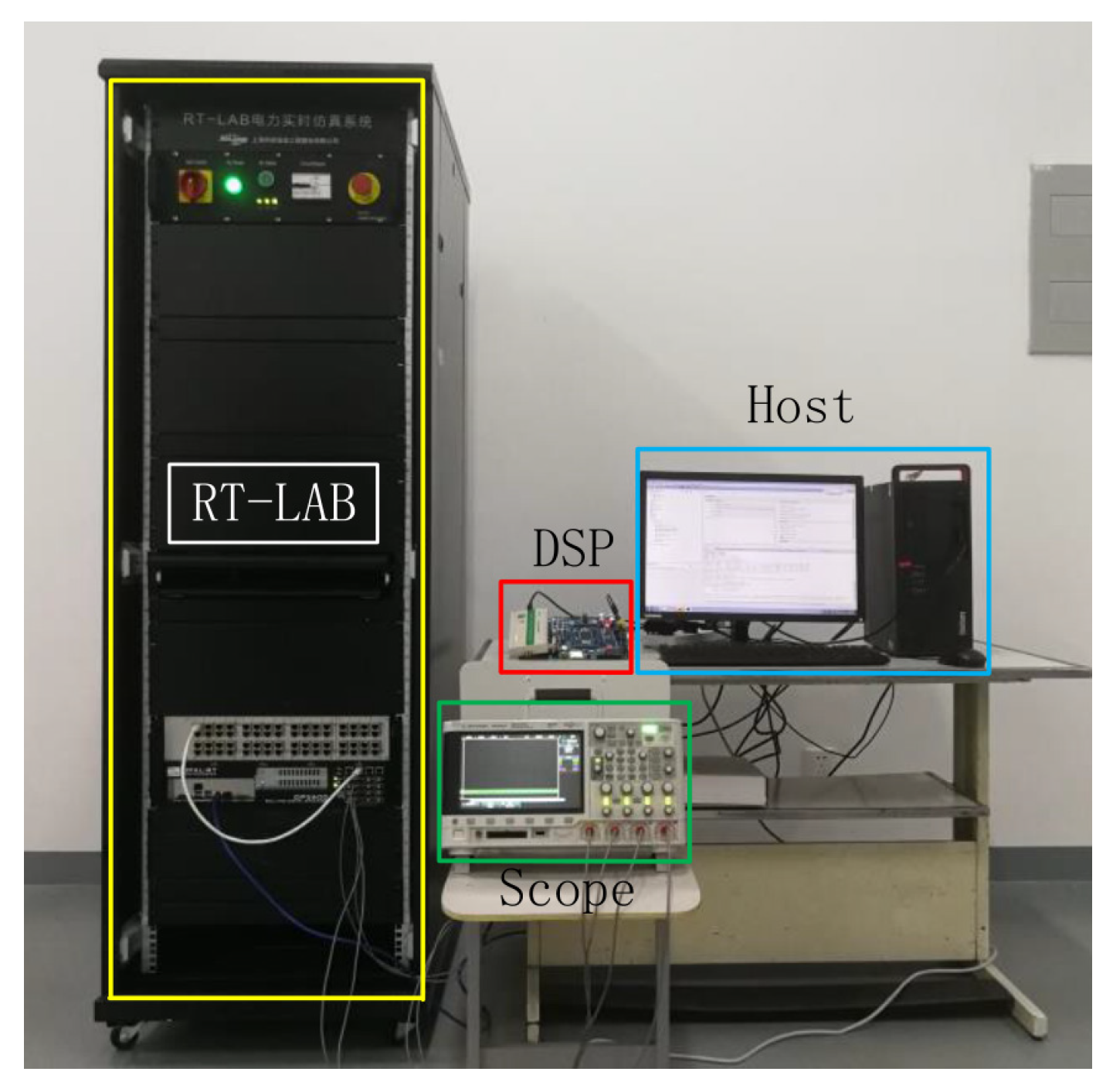
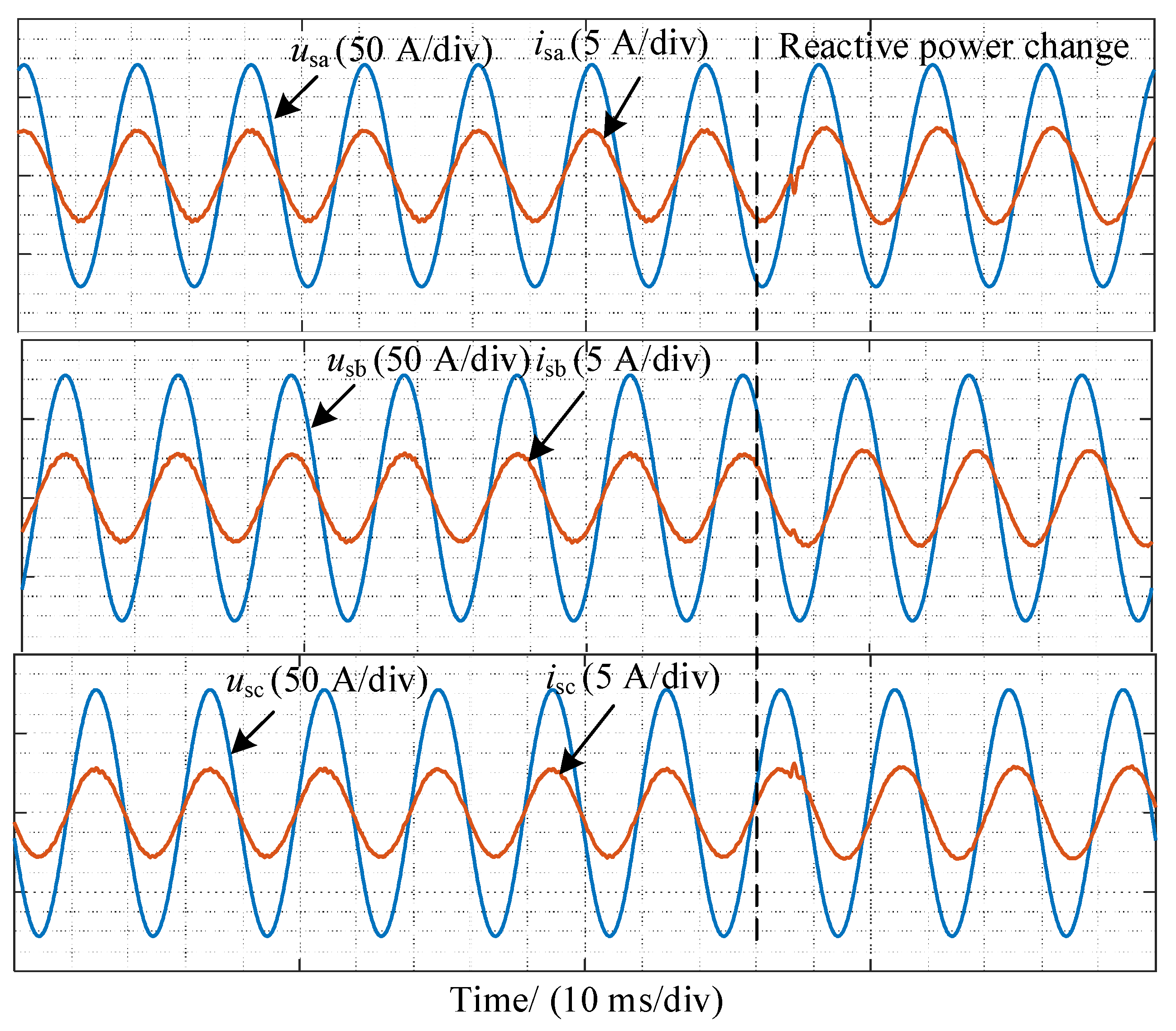
5.2. Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Kolar, J.W.; Friedli, T.; Rodriguez, J.; Wheeler, P.W. Review of Three-Phase PWM AC–AC Converter Topologies. IEEE Trans. Ind. Electron. 2011, 58, 4988–5006. [Google Scholar] [CrossRef]
- Karwatzki, D.; Mertens, A. Generalized Control Approach for a Class of Modular Multilevel Converter Topologies. IEEE Trans. Power Electron. 2018, 33, 2888–2900. [Google Scholar] [CrossRef]
- Lie, X.; Clare, J.C.; Wheeler, P.W.; Empringham, L.; Li, Y.D. Capacitor Clamped Multilevel Matrix Converter Space Vector Modulation. IEEE Trans. Ind. Electron. 2012, 59, 105–115. [Google Scholar] [CrossRef]
- Sun, Y.; Xiong, W.J.; Su, M.; Li, X.; Dan, H.B.; Yang, J. Topology and Modulation for a New Multilevel Diode-Clamped Matrix Converter. IEEE Trans. Power Electron. 2014, 29, 6352–6360. [Google Scholar] [CrossRef]
- Raju, S.; Srivatchan, L.; Chandrasekaran, V.; Mohan, N. Constant Pulse Width Modulation Strategy for Direct Three-Level Matrix Converter. In Proceedings of the 2012 IEEE International Conference Power Electronics Drives Energy Systems (Pedes 2012), Bengaluru, India, 16–19 December 2012. [Google Scholar]
- Raju, S.; Srivatchan, L.; Mohan, N. Direct Space Vector Modulated Three Level Matrix Converter. In Proceedings of the Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 17–21 March 2013. [Google Scholar]
- Casadei, D.; Serra, G. A general approach for the analysis of the input power quality in matrix converters. IEEE Trans. Power Electron. 1998, 13, 882–891. [Google Scholar] [CrossRef]
- Gong, Z.; Zheng, X.; Zhang, H.J.; Dai, P.; Wu, X.J.; Li, M. A QPR-Based Low-Complexity Input Current Control Strategy for the Indirect Matrix Converters With Unity Grid Power Factor. IEEE Access 2019, 7, 38766–38777. [Google Scholar] [CrossRef]
- Mondal, S.; Kastha, D. Input Reactive Power Controller With a Novel Active Damping Strategy for a Matrix Converter Fed Direct Torque Controlled DFIG for Wind Power Generation. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3700–3711. [Google Scholar] [CrossRef]
- Lei, J.X.; Feng, S.; Zhou, B.; Nguyen, H.N.; Zhao, J.F.; Chen, W. A Simple Modulation Scheme With Zero Common-Mode Voltage and Improved Efficiency for Direct Matrix Converter-Fed PMSM Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 8, 3712–3722. [Google Scholar] [CrossRef]
- Wang, H.; Su, M.; Sun, Y.; Zhang, G.G.; Yang, J.; Gui, W.H.; Feng, J.H. Topology and Modulation Scheme of a Three-Level Third-Harmonic Injection Indirect Matrix Converter. IEEE Trans. Ind. Electron. 2017, 64, 7612–7622. [Google Scholar] [CrossRef]
- Arevalo, S.L.; Zanchetta, P.; Wheeler, P.W.; Trentin, A.; Empringham, L. Control and Implementation of a Matrix-Converter-Based AC Ground Power-Supply Unit for Aircraft Servicing. IEEE Trans. Ind. Electron. 2010, 57, 2076–2084. [Google Scholar] [CrossRef]
- Arevalo, S.L.; Zanchetta, P.; Wheeler, P.W. Control of a matrix converter-based AC power supply for aircrafts under unbalanced conditions. In Proceedings of the IECON 2007-33rd Annual Conference of the IEEE Industrial Electronics Society, Taipei, Taiwan, 5–8 November 2007. [Google Scholar]
- Vijayagopal, M.; Silva, C.; Empringham, L.; de Lillo, L. Direct Predictive Current-Error Vector Control for a Direct Matrix Converter. IEEE Trans. Power Electron. 2019, 34, 1925–1935. [Google Scholar] [CrossRef]
- Rivera, M.; Rojas, S.; Restrepo, C.; Munoz, J.; Baier, C.; Wheeler, P. Control Techniques for a Single-Phase Matrix Converter. Energies 2020, 13, 6337. [Google Scholar] [CrossRef]
- Malekjamshidi, Z.; Jafari, M.; Zhu, J.G.; Rivera, M.; Soong, W. Model Predictive Control of the Input Current and Output Voltage of a Matrix Converter as a Ground Power Unit for Airplane Servicing. Sustainability 2021, 13, 9715. [Google Scholar] [CrossRef]
- Zhang, J.W.; Li, L.; Dorrell, D.G.; Norambuena, M.; Rodriguez, J. Predictive Voltage Control of Direct Matrix Converters With Improved Output Voltage for Renewable Distributed Generation. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 296–308. [Google Scholar] [CrossRef]
- Delghavi, M.B.; Shoja-Majidabad, S.; Yazdani, A. Fractional-Order Sliding-Mode Control of Islanded Distributed Energy Resource Systems. IEEE Trans. Sustain. Energy 2016, 7, 1482–1491. [Google Scholar] [CrossRef]
- Shaik, S.S.; Gudey, S.K. FOSMC Control Mechanism For Solar and Battery based Microgrid System. In Proceedings of the 2020 3rd International Conference on Energy, Power and Environment: Towards Clean Energy Technologies (ICEPE 2020) Shillong, Meghalaya, India, 5–7 March 2021. [Google Scholar]
- Calderón, A.J.; Vinagre, B.M.; Batlle, V.F. Fractional-order Control Strategies for Power Electronic Buck Converters. Signal. Processing 2010, 86, 2803–2819. [Google Scholar]
- Fei, J.; Wang, H.; Fang, Y. Novel Neural Network Fractional-Order Sliding-Mode Control With Application to Active Power Filter. IEEE Trans.Syst. ManCybern. Syst. 2021, 1–11. [Google Scholar] [CrossRef]
- Mra, B.; Gttpa, B.; Pjma, C.; Ghr, D.; Rh, E.; Td, A.; Ecf, G.; En, H.; Emk, I. Evaluation of flow pattern recognition and void fraction measurement in two phase flow independent of oil pipeline’s scale layer thickness. Alex. Eng. J. 2021, 60, 1955–1966. [Google Scholar]
- Mra, B.; Mas, C.; Pjma, D.; Ghr, C.; Bn, E.; Ecf, G.; En, H. Application of GMDH neural network technique to improve measuring precision of a simplified photon attenuation based two-phase flowmeter. Flow Meas. Instrum. 2020, 75, 101804. [Google Scholar]
- Roshani, M.; Phan, G.; Roshani, H.; Hanus, R.; Nazemi, E. Combination of X-ray tube and GMDH neural network as a nondestructive and potential technique for measuring characteristics of gas-oil-water three phase flows. Measurement 2021, 168, 108427. [Google Scholar] [CrossRef]
- Roshani, M.M.; Kargar, S.H.; Farhangi, V.; Karakouzian, M. Predicting the Effect of Fly Ash on Concrete’s Mechanical Properties by ANN. Sustainability 2021, 13, 1469. [Google Scholar] [CrossRef]
- Wang, Z.; Li, Y.; Gao, S.; Meng, L.; Ran, T. RBF Neural Network Sliding Mode Control for Aeronautical Remote Sensing Stable Platform. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020. [Google Scholar]
- Riedemann, J.; Pena, R.; Cardenas, R.; Blasco, R.; Clare, J. Indirect Matrix Converter Modulation Strategies for Open-end Winding Induction Machine. IEEE Lat. Am. Trans. 2014, 12, 395–401. [Google Scholar] [CrossRef]
- Shinde, P.B.; Date, T.N. Pulse Width Modulation Control of 3 Phase AC-AC Matrix Converter. In Proceedings of the 2017 International Conference on Computing Methodologies and Communication (ICCMC), Erode, India, 18–19 July 2017. [Google Scholar]
- Benachour, A.; Berkouk, E.; Mahmoudi, M.O. Study and Implementation of indirect space vector modulation (ISVM) for direct matrix converter. In Proceedings of the 3rd International Conference on Control, Engineering & Information Technology (CEIT 2015), Tlemcen, Algeria, 25–27 May 2015. [Google Scholar]
- Liu, G.; Wang, D.; Wang, M.; Zhu, C.; Wang, M. Neutral-Point Voltage Balancing in Three-Level Inverters Using an Optimized Virtual Space Vector PWM With Reduced Commutations. IEEE Trans. Ind. Electron. 2018, 65, 6959–6969. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of Neurons in the Middle Layer | 4 | 8 | 16 |
|---|---|---|---|
| MSE | 3.336 × 10−5 | 1.0259 × 10−6 | 5.0258 × 10−6 |
| Parameters | Values |
|---|---|
| Grid voltage usj/V | 311 |
| Filter capacitors Cf/μF | 12 |
| Filter inductors Lf/mH | 2 |
| Damping resistors Rf/Ω | 2 |
| Load resistors RL/Ω | 10 |
| Load inductors Lf/mH | 10 |
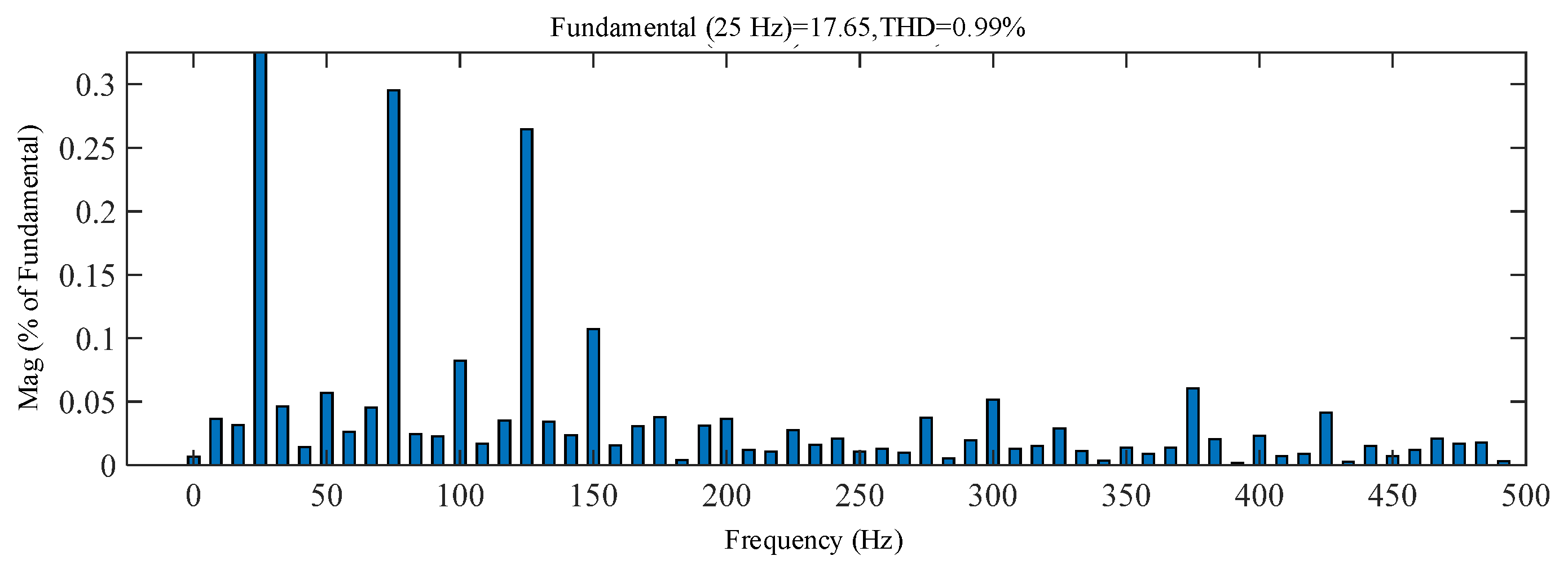
| Output frequency f0/Hz | 25 |
| Active power Pref/W | 5000 |
| Modulation factor mc, mv | 0.8, 0.9 |
| RBF hidden layer nodes | 8 |
| Learning rate η | 0.5 |
| Inertial coefficient α | 0.05 |
| Switching frequency fs/kHz | 20 |
| Grid Side Current | RBFFOSMC | RBFSMC | PI |
|---|---|---|---|
| FFT Analysis | 2.29% | 5.46% | 5.66% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, X.; Fang, H.; Wu, Y.; Jia, W. RBF Neural Network Fractional-Order Sliding Mode Control with an Application to Direct a Three Matrix Converter under an Unbalanced Grid. Sustainability 2022, 14, 3193. https://doi.org/10.3390/su14063193
Yang X, Fang H, Wu Y, Jia W. RBF Neural Network Fractional-Order Sliding Mode Control with an Application to Direct a Three Matrix Converter under an Unbalanced Grid. Sustainability. 2022; 14(6):3193. https://doi.org/10.3390/su14063193
Chicago/Turabian StyleYang, Xuhong, Haoxu Fang, Yaxiong Wu, and Wei Jia. 2022. "RBF Neural Network Fractional-Order Sliding Mode Control with an Application to Direct a Three Matrix Converter under an Unbalanced Grid" Sustainability 14, no. 6: 3193. https://doi.org/10.3390/su14063193