1. Introduction
Renewable energies, especially solar energy, have an upward penetration in general agriculture fields, particularly in agriculture robots or vehicles. Currently, modern agriculture depends mainly on robots for harvesting, planting, spraying pesticides, and performing unreachable tasks, which save human effort, costs, and time. Our proposed project is concerned with detecting and killing insects harmful to crops in remote farms which have shortage in power sources. The project needs a renewable power source with a continuous flying killing drone. The project was encountered by many challenges. The first challenge is the absence of traditional power sources in the mission location. The second challenge is the time and energy consumed in returning the drone to the charging platform. The third challenge is the time consumed in charging the drone battery after returning to the charging platform, which affects the mission time negatively.
The works in [
1,
2] provided different methods for intelligently analyzing and simulating the energy of a Li-ion battery used in remote power sources. An Adaptive Neuro-Fuzzy Inference System (ANFIS) model, a dynamic artificial neural network approach based on Nonlinear Autoregressive eXogenous (NARX) model, and a soft computing technique were used to simulate the system using MATLAB software. Some works provided solutions for the absence of power sources where renewable energy systems were proposed as renewable power sources, representing a solution for the first challenge. Fuel cell and Photo Voltaic (PV) systems had the highest integration in powering the drones [
3]. The method in [
4] provided the power required for onboard electronic charging systems on an Unmanned Aerial Vehicle (UAV). An energy management system consisting of MPPT, battery management, and power conversion stages was proposed in this work. A high-efficiency aircraft was designed and fabricated in [
5] to validate a proposed fuel cell system.
Some works provided solutions for the second challenge, which is the time consumed by UAVs to return to the fixed charging platform. One of the proposed solutions was wireless charging, which could charge drones’ batteries during flying without landing to increase the mission time. A UAV was powered from a wireless laser-powered system, where a laser beam was transmitted to charge a UAV during flight [
6]. However, the work field was limited in time and mission reach. A design of a quadcopter platform of unlimited flight time with laser power beaming was presented in [
7].
Some researchers concentrated on a wireless charging station from renewable energy sources, not from power lines, to overcome the first and the second challenges [
8]. The project in [
9] proposed an automatic system for charging the UAV consisting of a module of power supply, charger module, and control module, which could control the take-off and return time of the UAV. A renewable solar power source was used for power transfer with a fully automatic charging system to abandon human supervision to make the system completely autonomous. In [
10], a PV wireless charging system was designed to allow continuous flying of full autonomous quadrotors. A resonant inductive coupling technique was used for the drone charging application. The presented project in [
11] was concerned with overcoming the limitations and capabilities of wireless transmitting the power for some UAV applications. By applying the proposed concept, the quadrotor could be charged in its place. However, it is valid only for particular tasks.
Other projects, such as the one explained in 2017 by Khonji, have proposed solar-powered systems that used energy storage devices such as a battery to store energy [
12]. A mobile robot as a portable battery is used to charge from a stationary solar power and then it moves towards the drone for which its battery has been depleted. An inductive wireless receiver was inserted into the drone to perform the charging process. This method had successfully provided a renewable power source, but it was inefficient and time consuming. It is time-costly and energy inefficient because of the charging time and the consumed time for the mobile robot to move from and to the stationary power station.
Some of the previously proposed ideas have succeeded in putting solutions for the first and second challenges facing the drones for ongoing missions. Some problems still appear in these works, such as the cost of transferring the charging power and the time consumed in the charging process. Some researchers had overcome these problems by replacing the depleted battery with charged a one instead of charging it. Fujii in [
13] enabled drones to fly continuously by developing an automatic battery replacement system without being constrained by battery power limitations. However, the system depended on a non-renewable power source to charge batteries before replacing the depleted ones; thus, it was not suitable for remote areas with a shortage of power sources. Another new technique is proposed in [
14] to make the drone continuously available in the mission location. A system consisting of a certain number of drones and an adequate number of charging stations was used to guarantee that fully charged drones are always available in the mission location to replace drones for which their batteries were depleted. This work used the drones replacement technique instead of a battery replacement system to make a continuous flying system. Unlike this work [
14], a new system with a non-renewable energy-powered changer was designed to enable fast hot swaps for charging eight batteries for many vehicles to provide one vehicle system with an endless working time [
15].
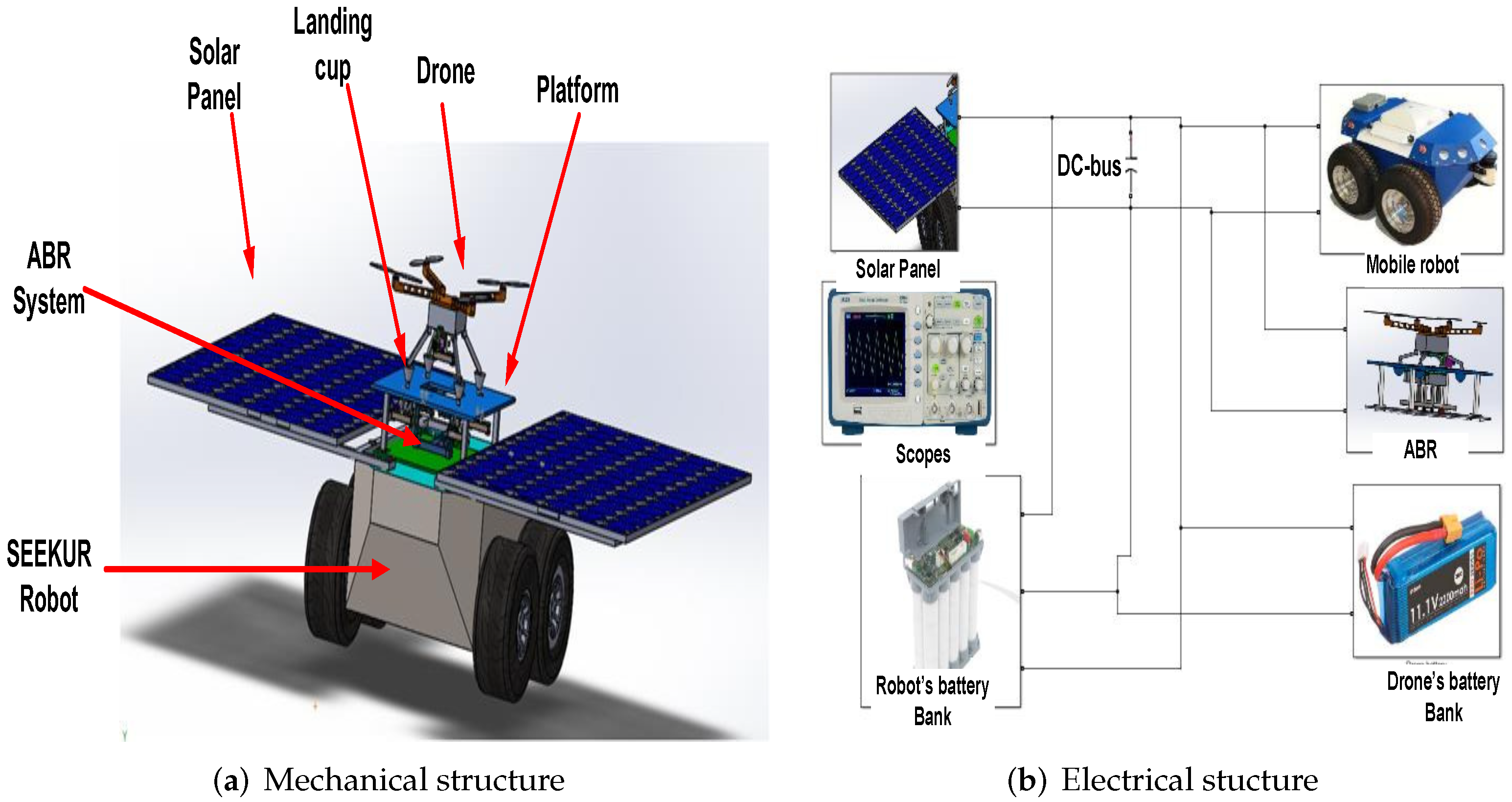
The main contribution in our proposed system is to propose a solution for the three challenges mentioned above with a newly proposed energy management technique. The system consists of a continuous movable power supply using a movable power station, a renewable energy source for remote areas using solar panels, and a continuous flying drone using an Automatic Battery Replacement (ABR) system. The project is a movable, endless flying, and solar-powered insect killer. To the best of our knowledge, this is the first project combining the three solutions to overcome the three challenges. A new algorithm is proposed to control the start/stop time of the mission while the effects on the system energy and the mission period were studied in our previous work [
16]. A new Battery Selection System (BSS) is proposed to achieve the optimal benefit of available solar power in charging the drone’s battery, powering the movable power station, and energizing the ABR system. The new BSS can prioritize the mechanical and electrical loads according to excess or shortage in solar energy during the day. BSS can control the selection of the charged battery and maintain the charging level of the battery based on mechanical loads and available solar energy.
The work aims to reduce the number of drones used for insect-killing missions from four drones to only one by automatically replacing the depleted battery. Using four drones without an ABR system needs more control, weight, and cost to design four charging platforms for the four drones. The movement of the charging station with a drone charging on its roof represents a mechanical challenge as well as high power consumption. Using ABR with one drone for the mission is more efficient for power, control, and cost. This means that the system is not only proposed to serve one drone but also a swarm of drones with 25% of the drones that can be used with an ABR system with an appropriate power rating of the installed movable charging station. In this paper, the conducted system is designed to serve one drone for continuous flying. A new system is designed to control the available power from the PV system to charge the highest priority battery; thus, the drone can find a fully charged battery when it lands on the platform. The proposed system uses a battery replacement system to reduce the drone’s charging time. Nevertheless, it is different in using a charging selection system to charge batteries based on the priorities of need.
The paper is organized as follows.
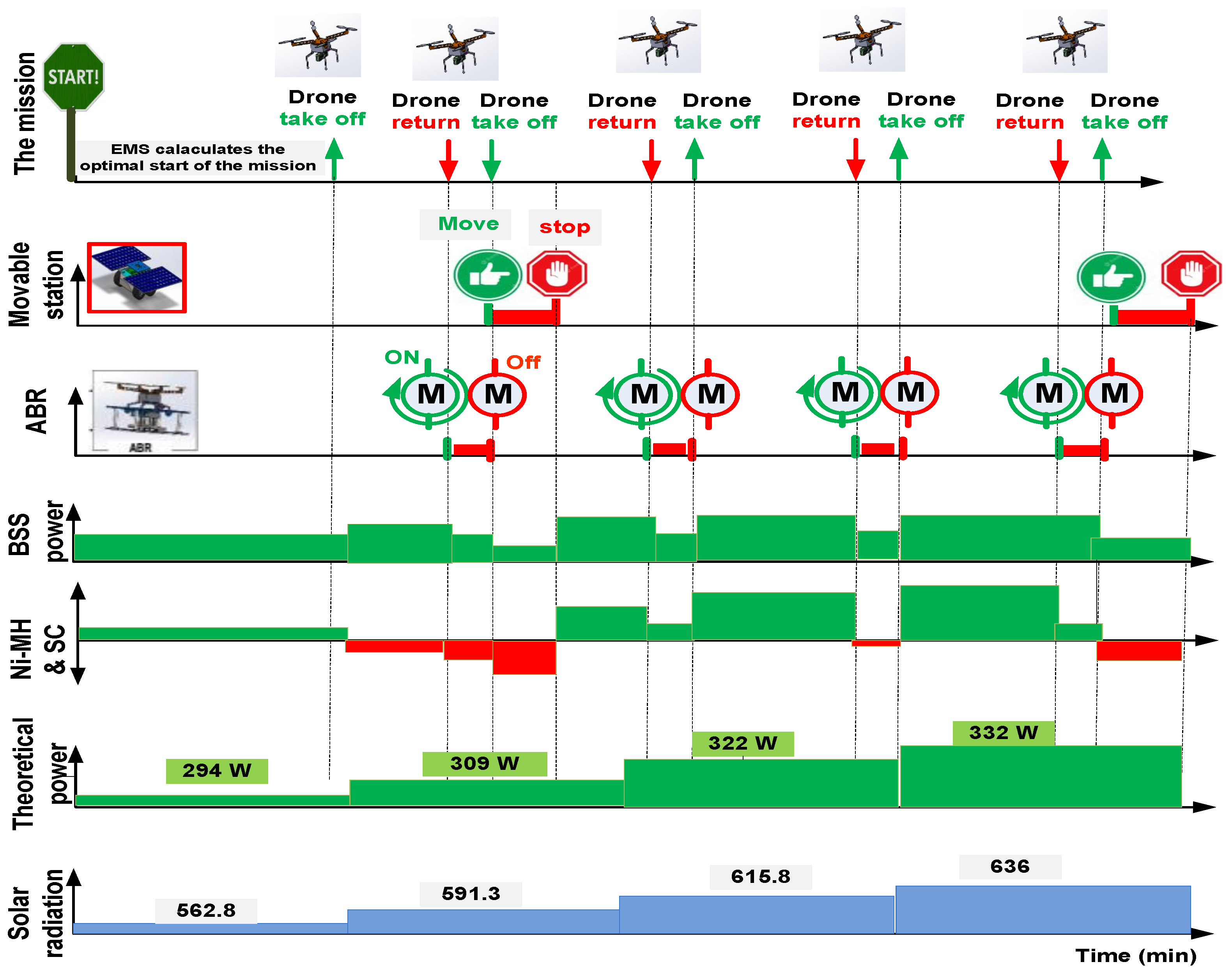
Section 2 explains the mechatronic system components as well as the timeline and the priority operation of the mission. The task management system and the automatic battery replacement system are detailed in
Section 2.
Section 3 depicts the charging process of batteries, the design, and control. The new battery selection system is explained in
Section 4.
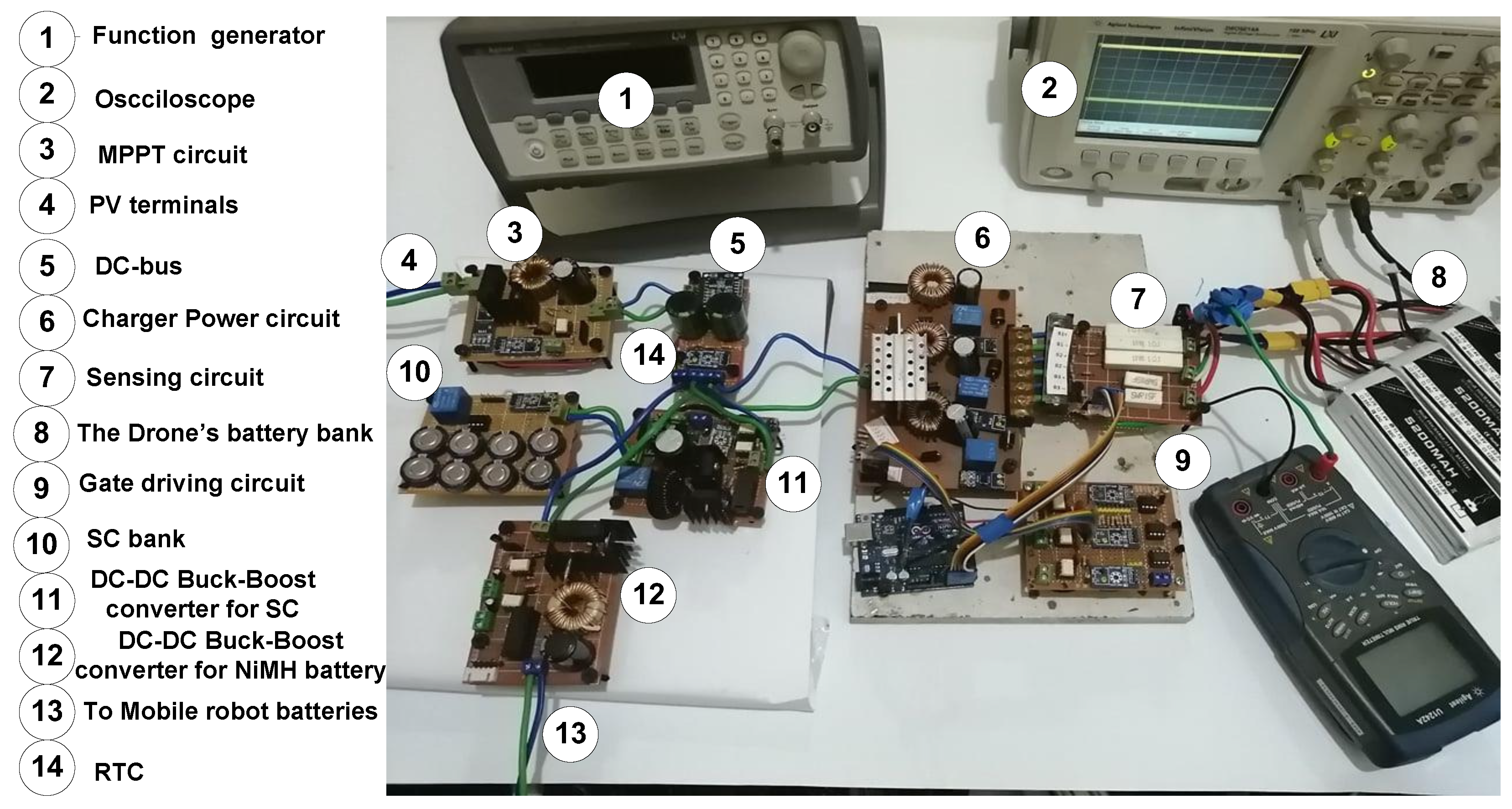
Section 5 introduces the experimental setup of the system. By conducing MATLAB simulation and experimental results,
Section 6 validates the design and control of the proposed system. Finally, conducting remarks and some future works are summed up in
Section 7.
6. Results and Discussion
In this section, a comparison between the simulated system by MATLAB and the experimental setup is made. The results are divided into three main subsections: comparing comparison between the MPPT methods, the charging curves’ results, and the battery selection system results. Three methods, IC, P&O, and PSO, are selected to obtain maximum power points due to their easy implementation on the micro-controller system and low execution time. A comparison between the three methods is made to choose the best method for the system to be the MPPT method. The second part of the results section handles the implementation of the CCCV charging technique and studies the comparison between the simulated system and the practical one. The last part of the results demonstrates the effectiveness of the battery selection system in reducing charging time and benefiting the available PV power efficiently. The BSS selects the appropriate battery to be charged and its charging current according to the operating conditions so the system can trade-off between the continuous availability of charged battery for the drone, the equal charge/discharge times for all batteries, and the efficiency of extracting the maximum available power.
6.1. MPPT Methods
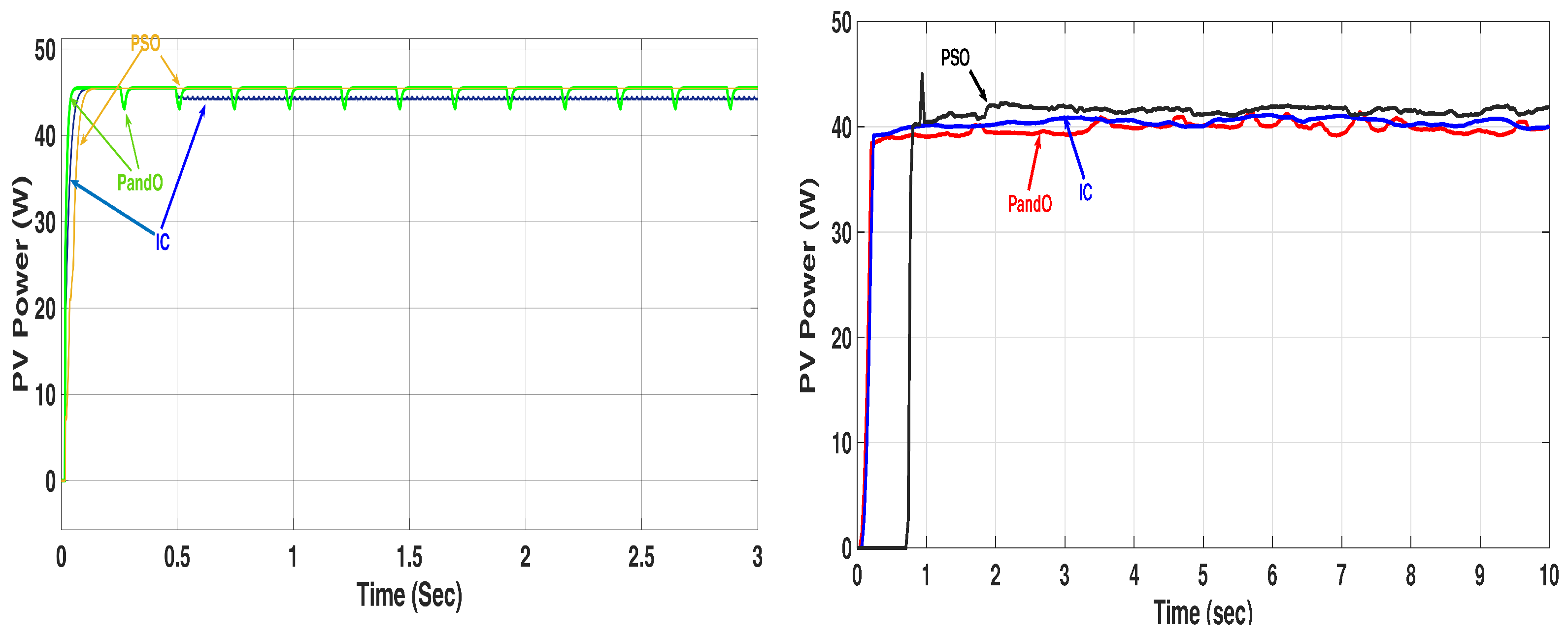
Three methods are used to extract the PV system’s maximum power: IC, P&O, and PSO to choose one of them.
Figure 18a shows the simulation comparison between the three suggested methods, while
Figure 18b experimentally makes comparisons between them. It is observed that there is a lag in the curve of PSO in simulated and experimental results. The oscillation in P&O is higher than others, while PSO fluctuation is the smallest in simulation and experiment. Although PSO has the slowest rise characteristics (high rise time), the average power is higher.
The extracted energies in a time of 10 s are 453.1J, 441.89 J, and 452.2 J for PSO, IC, and P&O, respectively. From this figure, the theoretical maximum power is 46.6 in the conditions of 680 W · m−2 irradiation and a temperature of 48 °C. PSOs lost energy of 14.4 J from the expected 464 J energy in 10 s, while P&O lost 15.1 J and IC lost 25.2 J.
6.2. Charging Process
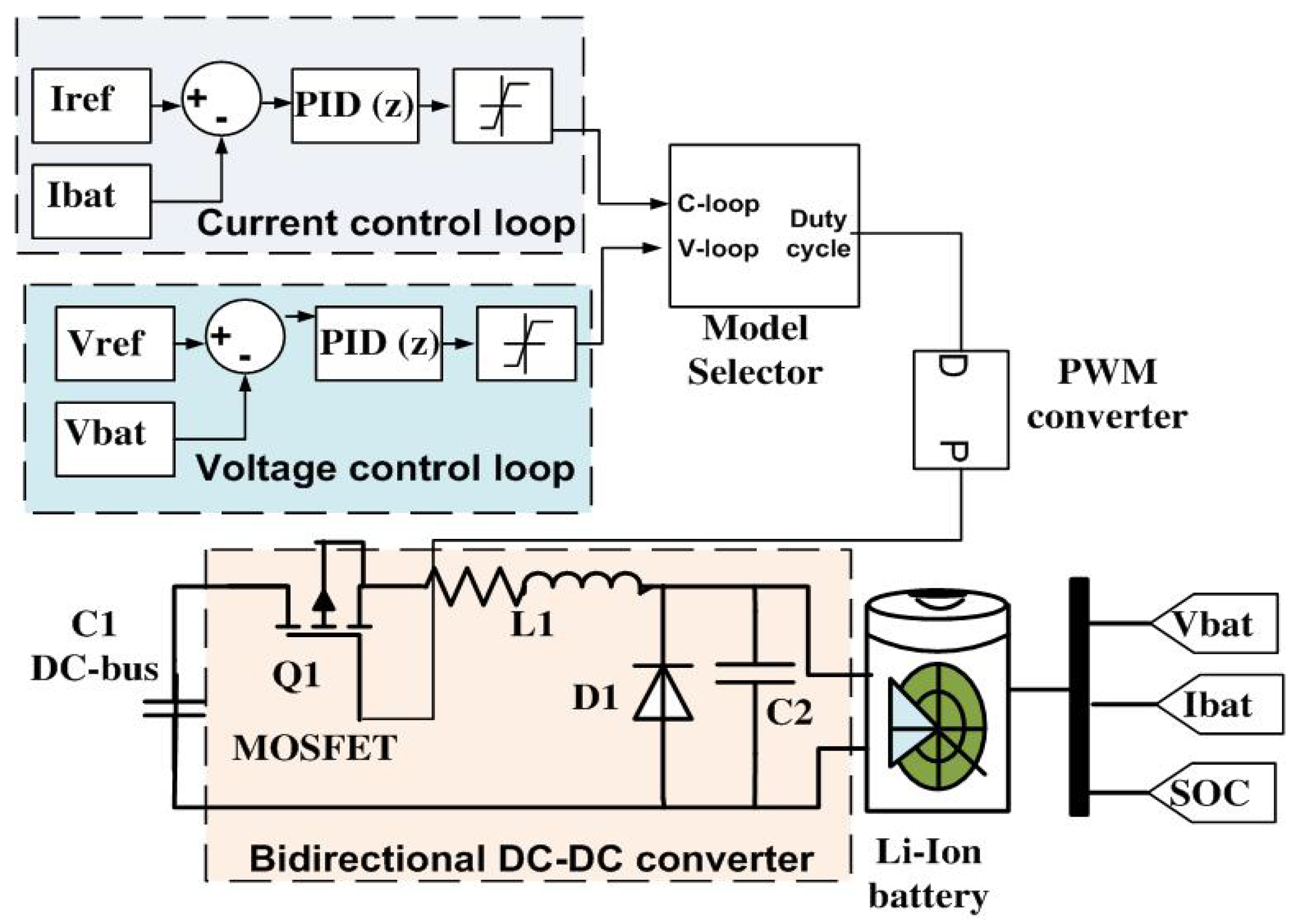
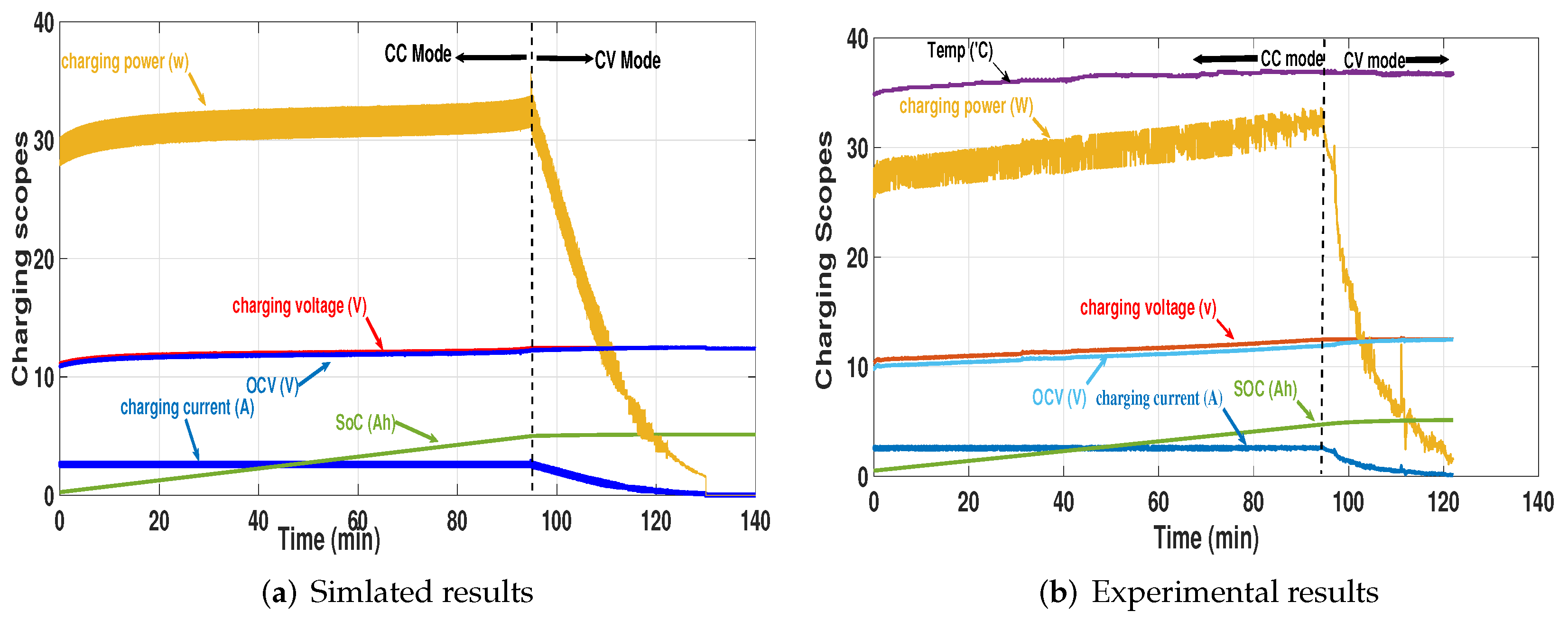
The CCCV is the recommended charging technique in LiPO batteries.
Figure 19a shows the simulated charging curves of the CCCV charger.
Figure 19b shows the curves from the physical charger at the same conditions of 0.5 C charging rate.
The experimental charging curve begins with 0.5 Ah SOC (about 9.2% of ) because it is not recommended to fully deplete the battery while the simulation curve begins with 0.26 Ah (about 5% at the edge of depletion). The experimental curve is slightly different from the simulated results because of the change in controller speed in the two cases. The temperature is sensed by DHT-122 temperature sensor, and as evident, the temperature increases with time. By increasing the charging current, the battery temperature increases. The results shows that the implemented charger is very close to the simulated one.
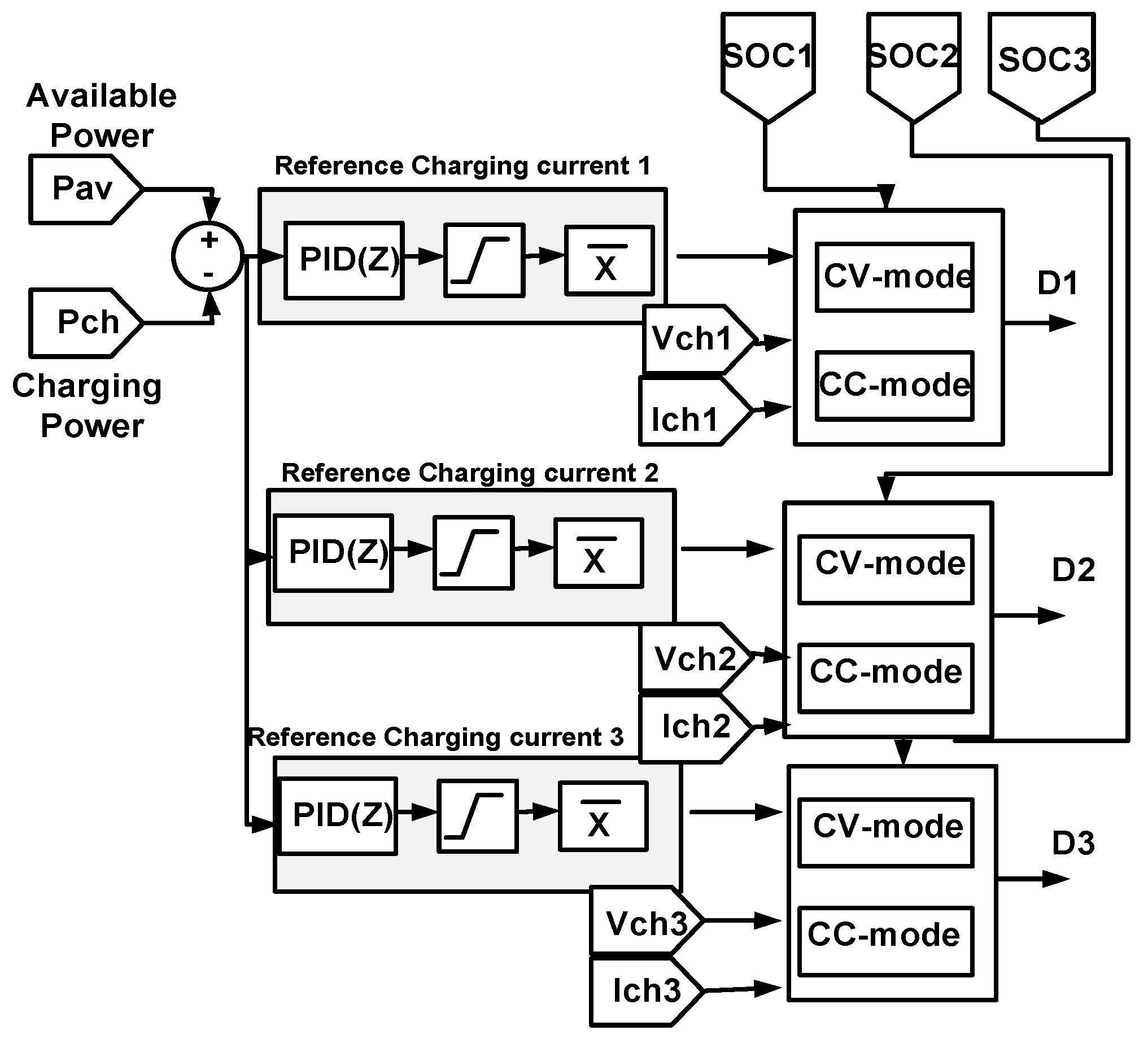
6.3. Control of Battery Selection System
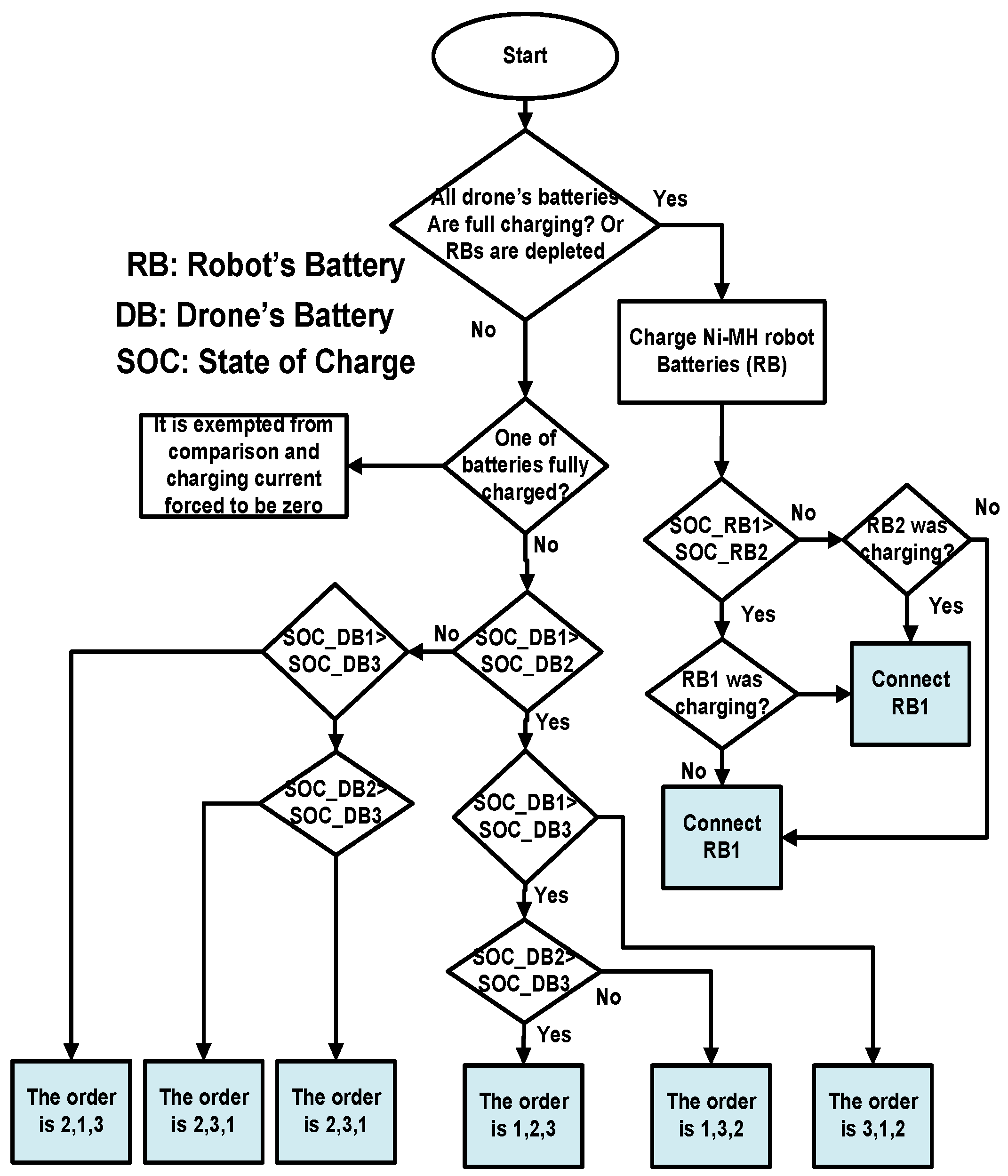
In this section, the results of BSS during different operating conditions in simulation and experimental setup are shown and discussed. The results of BSS are demonstrated in this section to validate the reliability, efficiency, and priority achieved. The reliability of BSS is verified by working on different random operating conditions. The system’s efficiency, which indicates the benefit of the maximum available power in charging and powering, is calculated. The priority achievement of the system is verified by changing places of the batteries in the charging houses and observing the system’s charging response. BSS followed the the order of batteries discussed in
Section 4. During charging, ordering the batteries in battery houses depends on their charge states, while charging current levels depend on different system variables. The available power, batteries SOC, the time remaining for the drone returning to the platform, and the availability of fully charged battery are variables affecting BSS actions.
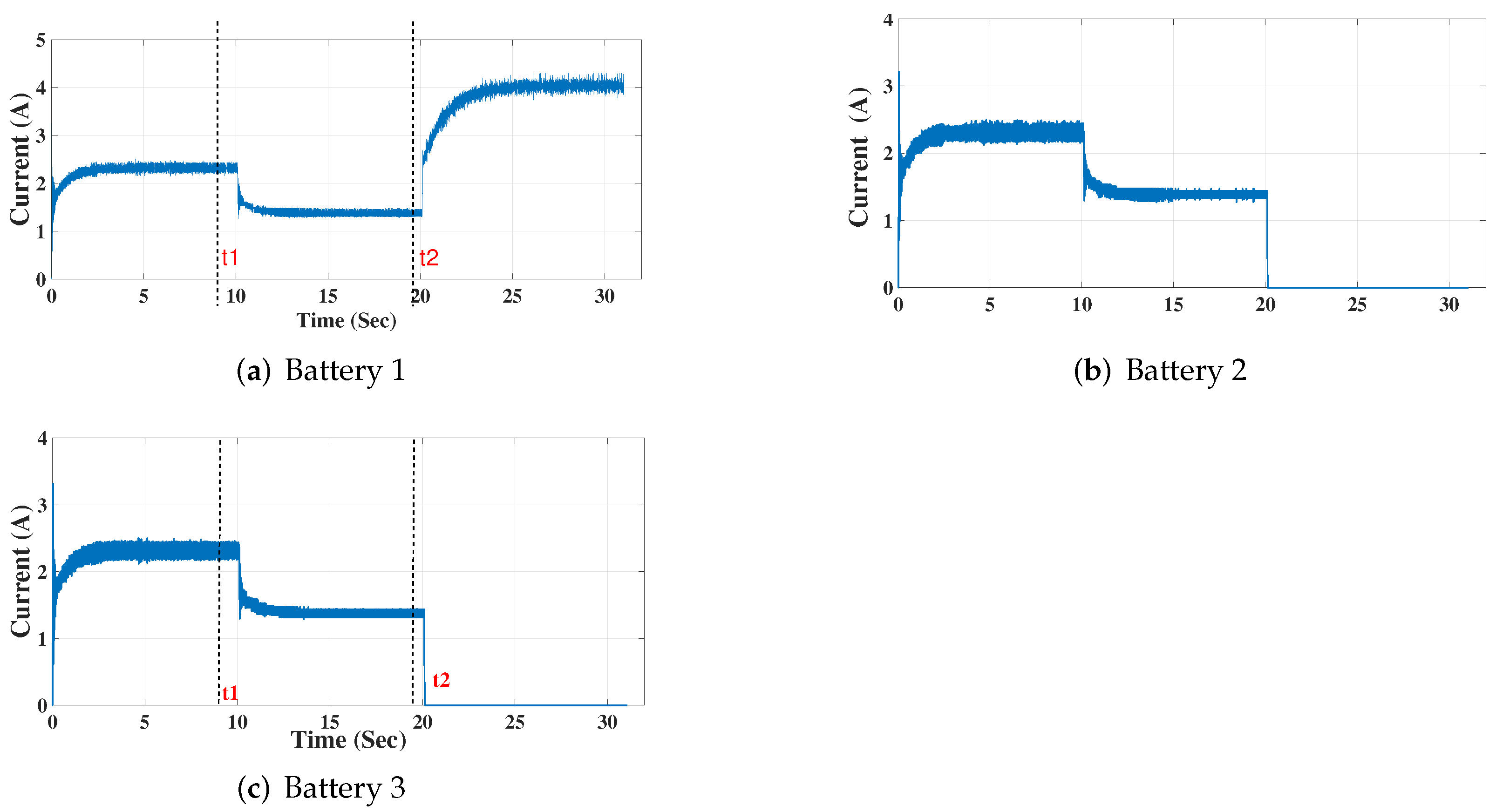
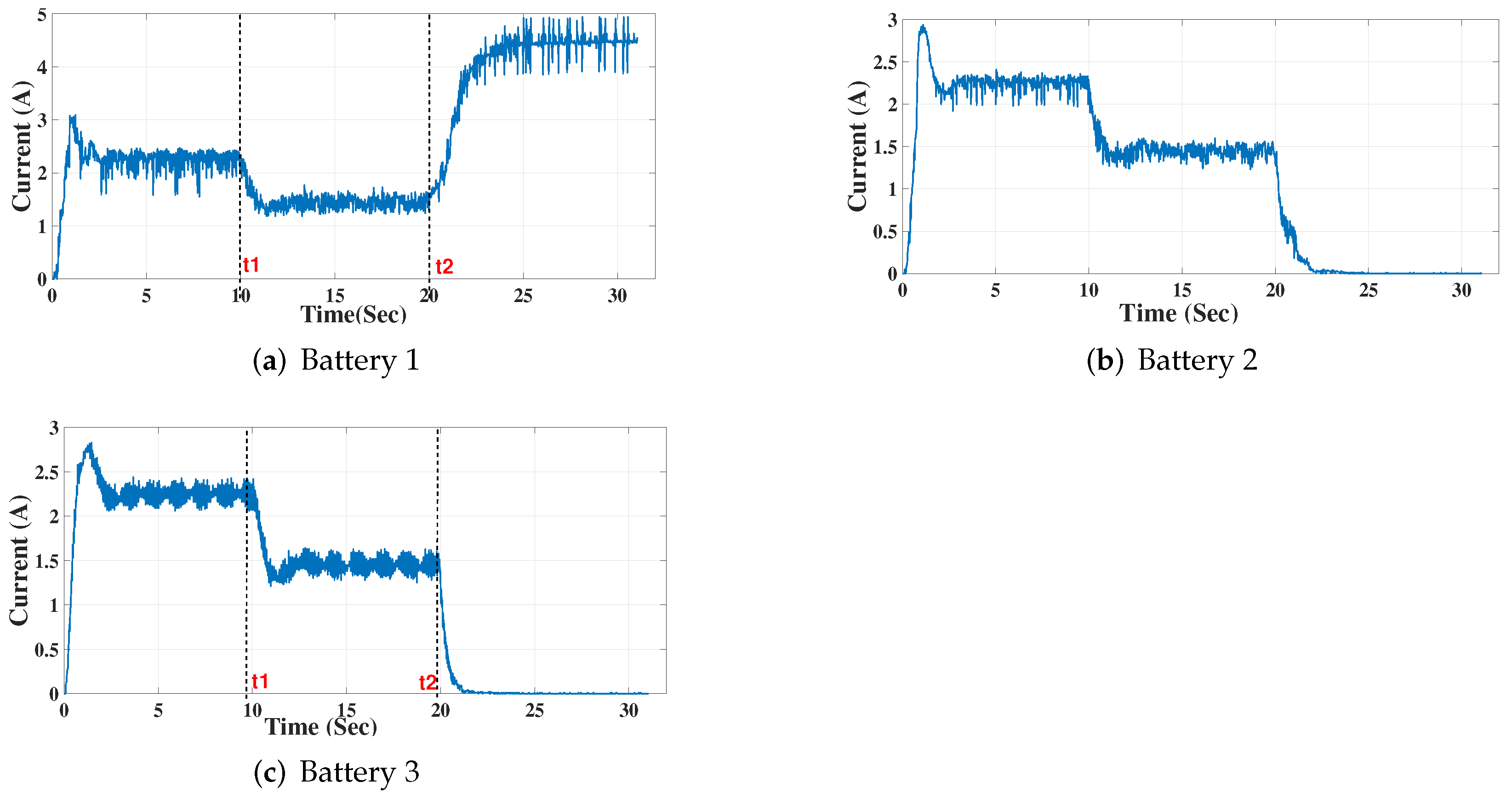
Figure 20 shows the simulated current scope of the battery bank for the three batteries during charging, while
Figure 21 shows the experimental scope of the current for the same operating condition.
In this case, the available power is dropped at time where the three charging currents are reduced to share the newly available power equally. In this case, the calculated time to fully charge one of the batteries is shorter than the time remaining for the drone to return to the platform; thus, power-sharing is equal.
At , the time remaining for the drone to return is lower than the time required for complete charging the battery with this charging current. At this moment, the highest SOC battery will charge with its maximum possible current (max 1 C = 5.2 A). The available power is not enough to raise the charging rate to 1 C, but this is considered so that the charging process ends before the drone comes back.
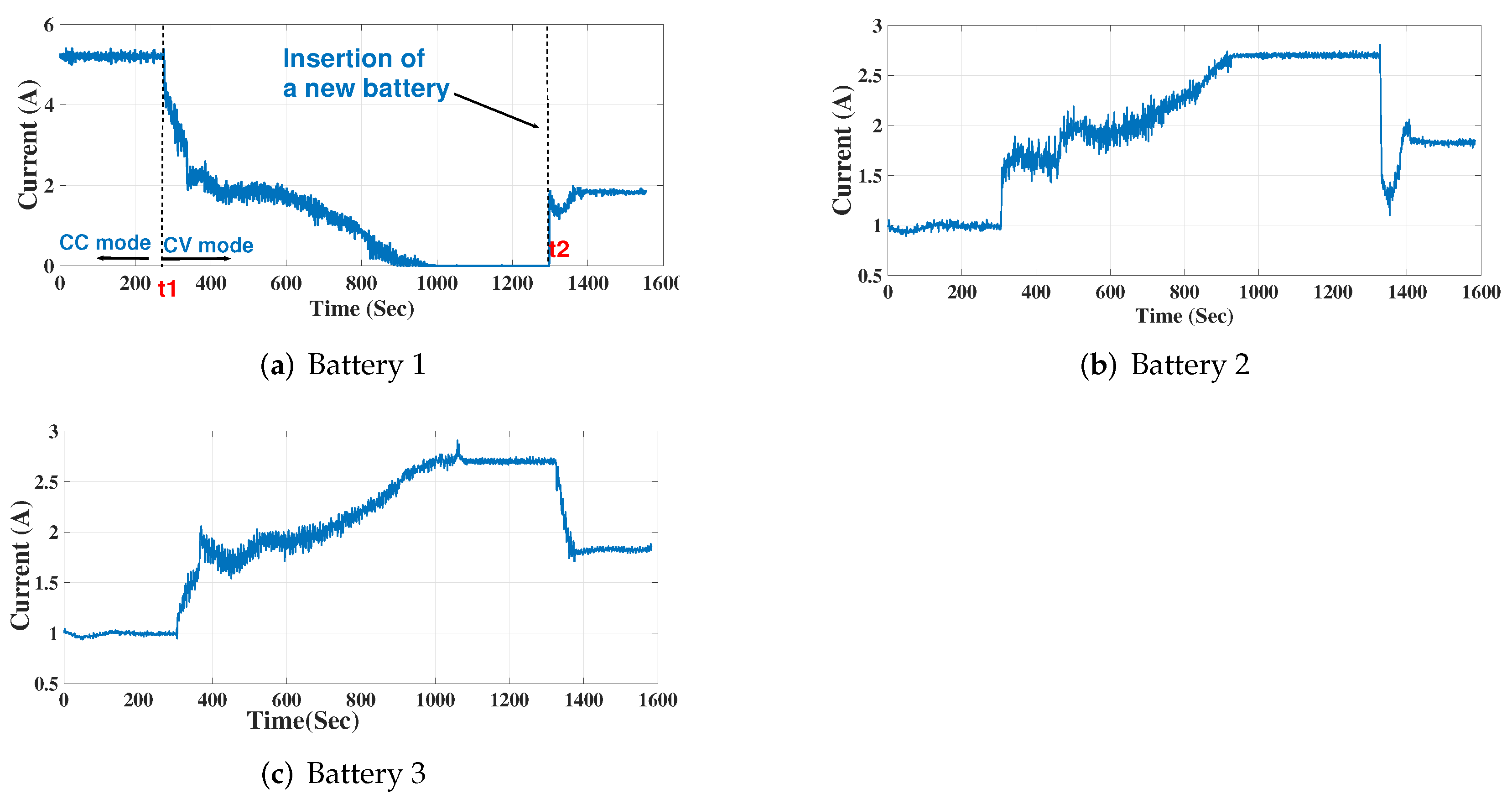
In
Figure 22, the highest SOC battery reaches its CV charging mode where its charging voltage is constant at time
and its charging current is reduced gradually to zero at the end of the charging process; then, it waits for the drone to return. At time
, ABR replaced the battery DB1 with the drone’s depleted battery DB4. From time
, the three batteries charge equally with the available power. In parallel to that, BSS calculates the time for the highest SOC—DB2 in this case–to be fully charged to raise its charging level at the right time. At this moment (
), the SOC of battery 2 (the highest SOC in batteries order) is 92%.
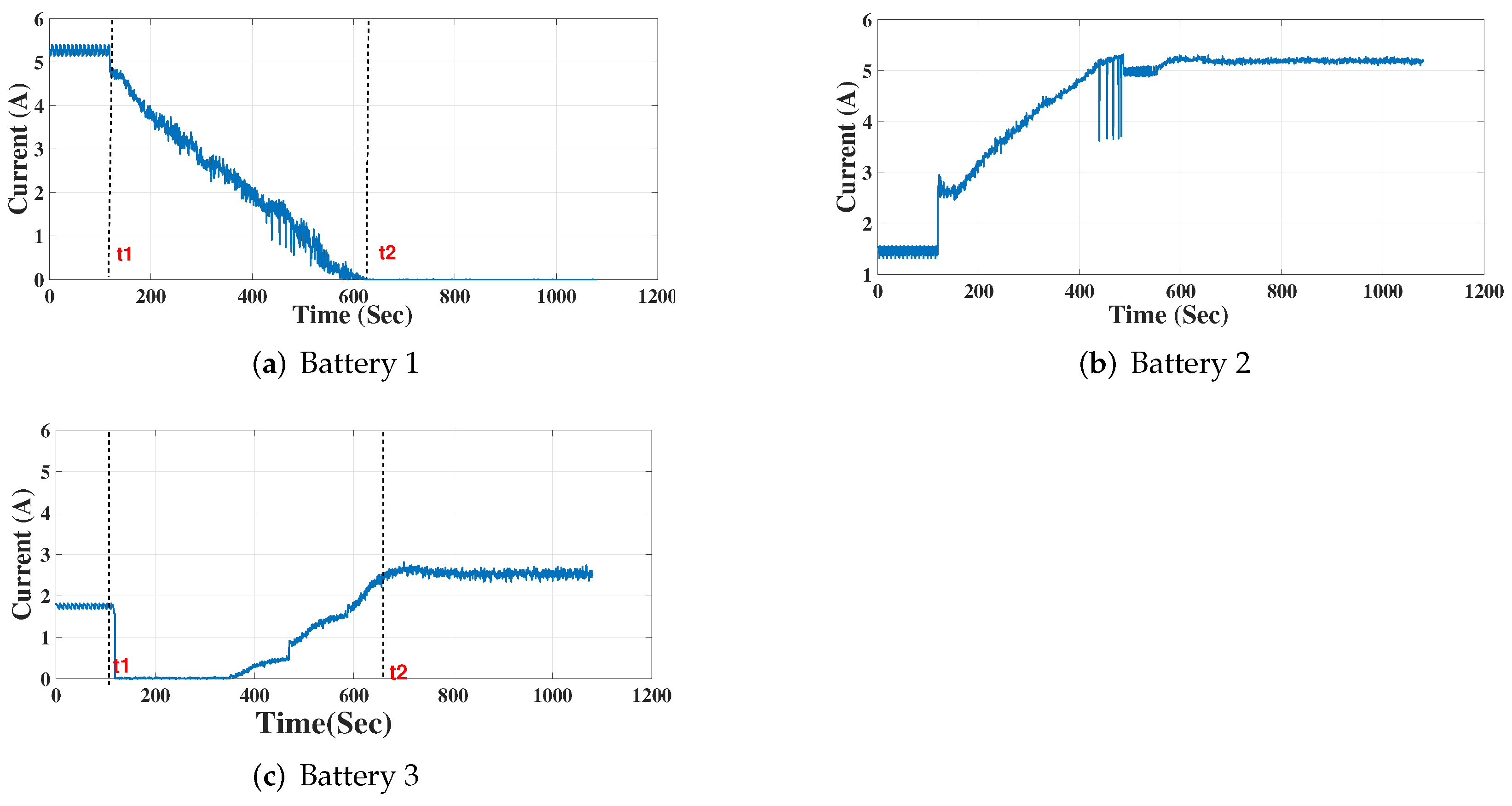
In the case of low SOC for all batteries, the behavior of BSS charging is shown in
Figure 23 where the next charging battery (battery 2) does not have enough time to charge in equal sharing mode. This case is the same as in
Figure 22, except that battery 2—which has the highest SOC after replacing battery 1— has low SOC compared to battery 2 in
Figure 22. The correct action is to raise the reference charging level of battery 2 (max 5.2 A if possible) at time
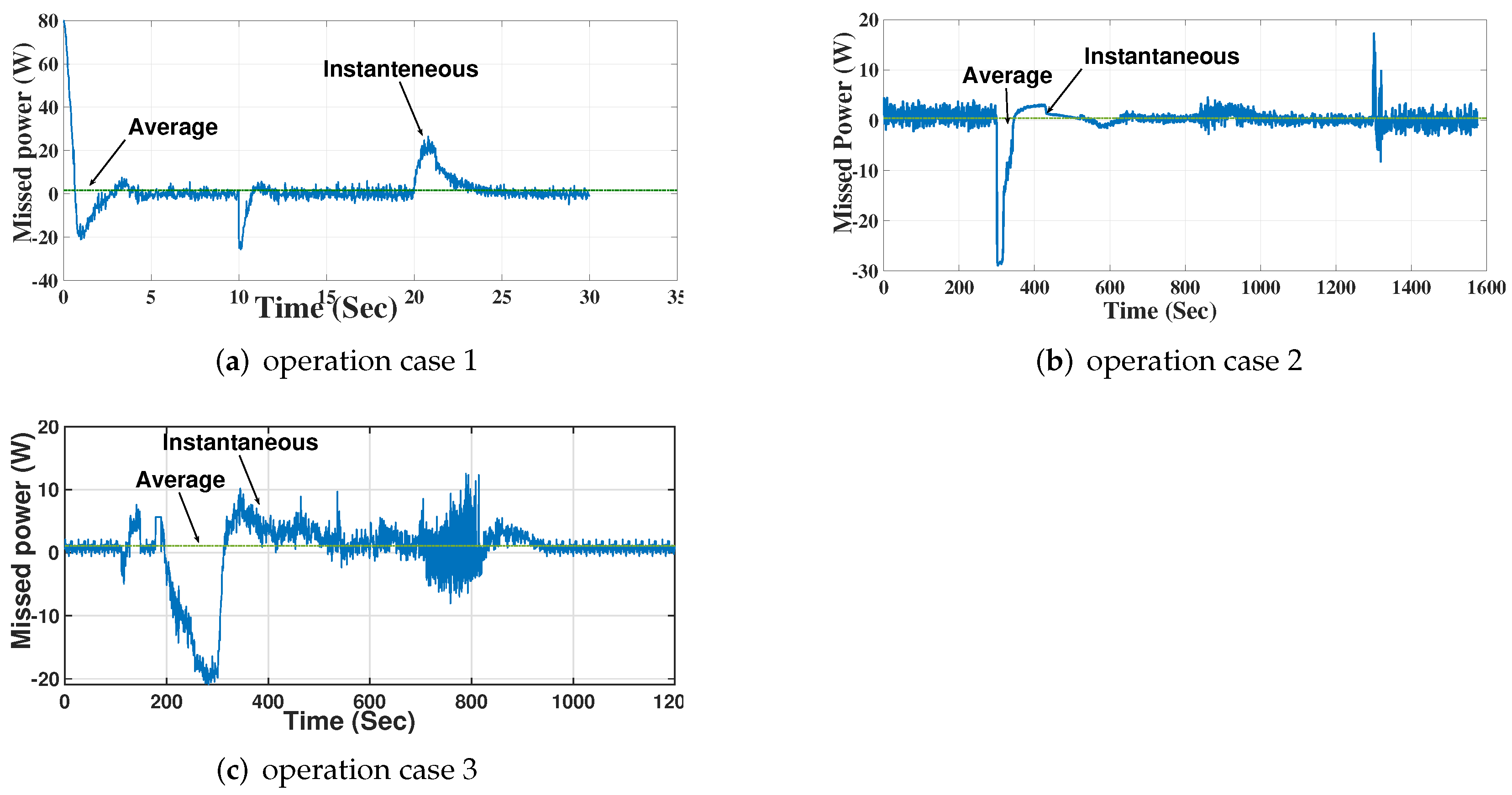
to reach complete charging quickly. The power mismatch between charging and available power is declared in
Figure 24. The curves in
Figure 24a–c represent power loss in the previous three operation cases discussed in
Figure 21,
Figure 22 and
Figure 23, respectively.
7. Conclusions
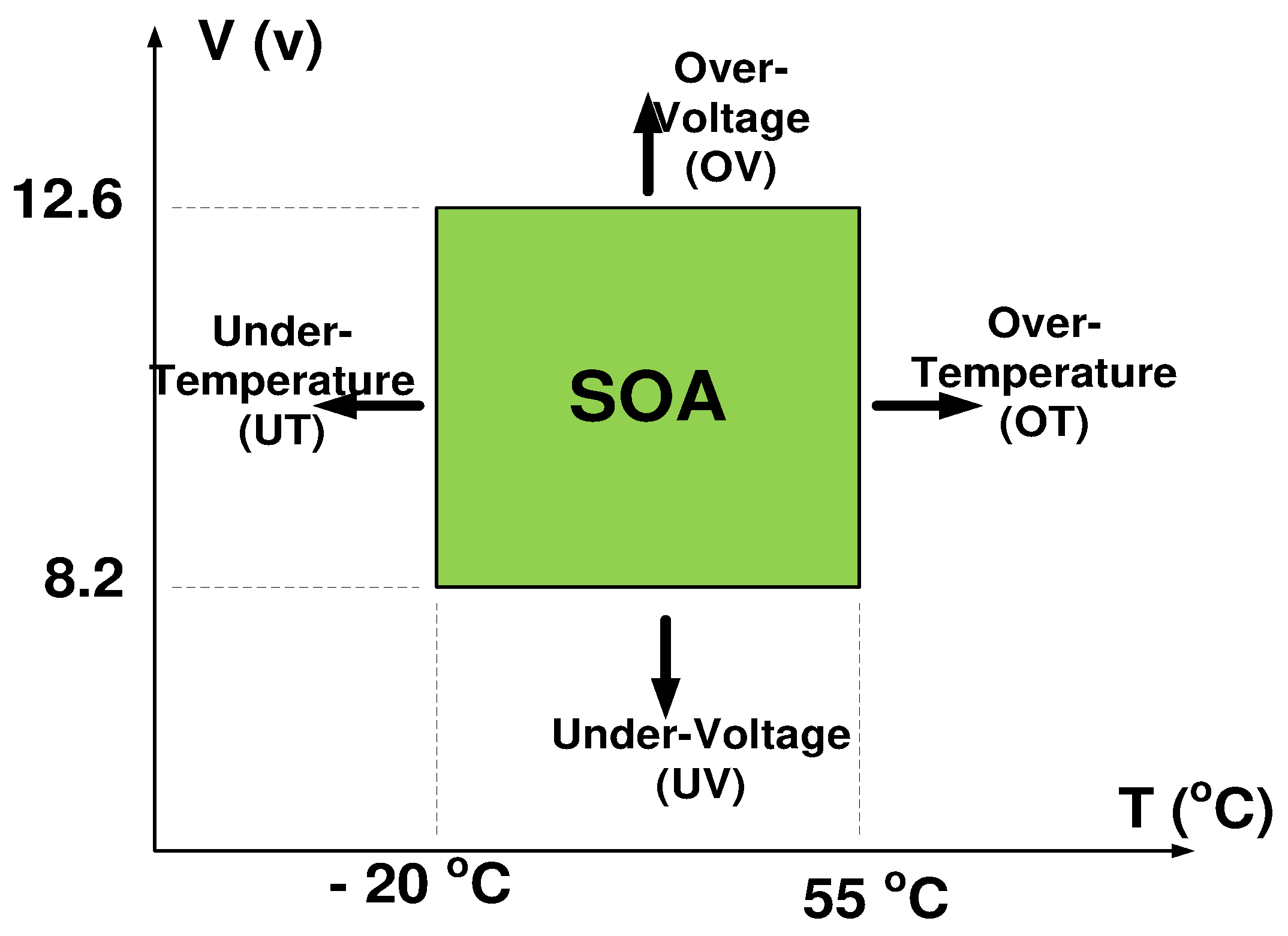
A PID CCCV charger was designed and tested with a flexible reference charging current with different protections (OV, UV, OC, and OT). A charging platform consisting of four smart LiPo battery chargers was designed and experimentally tested. A solar MPPT tracker was designed to experimentally verify different MPPT methods in MATLAB simulations. The experimental and simulation results approved that PSO was the recommended method used in this project among the studied methods because of its high target reach (about 97%) and low steady-state oscillation (maximum 2.15%).
In order to efficiently use PV power, we proposed a new battery selection system to control the charging process of batteries and select the charged battery based on the priority code. The BSS controls the flexible reference charging current and changes gradually up to 5.2 A (1 C) based on available power. Both simulated and experimental results highlight the effectiveness of the proposed BSS to select the appropriate battery and charging levels. Different operation cases were studied to verify the reliability of the proposed technique, and the average power loss in different cases did not exceed at the worst case, 1.5 W (or less than 2%).
In the future, a design of automatic battery replacement system can be experimentally built. The target is to limit battery replacement time to 60 s in order to reduce the dead time and increase the mission time of the drone. New methods of MPPT can be used, such as artificial neural networks, ant colony, Cuckoo search, and chicken swarm optimization. A simple Image-Based Visual Servoing (IBVS) algorithm will be used for drone landing.





























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}