
Electric Vehicles Aggregation for Frequency Control of Microgrid under Various Operation Conditions Using an Optimal Coordinated Strategy

 ,
,  ,
,  , ,
, , 
Abstract
:1. Introduction
- (1)
- The proposed coordination of the FR power of generators and EVs under different optimization objectives with the goal of secure and economic operation of power system through optimal coordinated strategy;
- (2)
- The coordinated control principle is drawn between the EVs and generators based on the optimization method proposed in this manuscript;
- (3)
- The proposed particle swarm optimization (PSO) and genetic algorithm optimization toolbox (GAOT) algorithms are used to study frequency control based on the optimal values of the fuzzy controller parameters;
- (4)
- A PSO-based FLC scheme is presented to discover the required frequency regulation performance of the microgrid integrated with renewable energy sources, non-renewable energy sources, and prosumers;
- (5)
- The proposed optimization objective under normal power system operation is minimum FR cost, to ensure the minimum degradation cost associated with batteries;
- (6)
- In the abnormal state of power system operation, the optimization objective is shifted to ensure minimum frequency restoration time;
- (7)
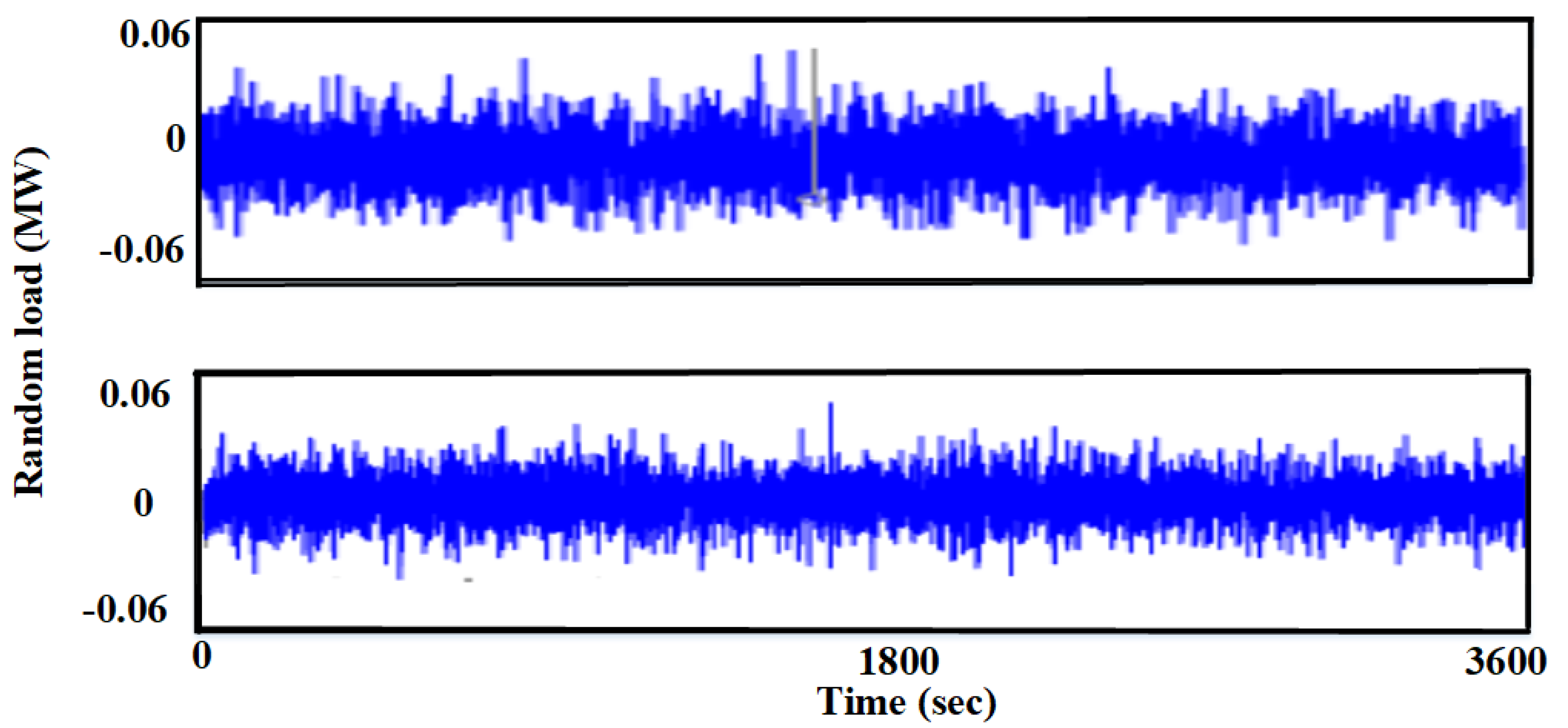
- The proposed simulation involves the addition of a series of step loads and random loads in the abnormal and normal states, respectively.
2. Problem Formulation
2.1. Objective Function
- Δ I ndicates the deviation;
- f denotes frequency;
- M represents the angular momentum factors;
- PV2G indicates the vehicle-to-grid (V2G) power of aggregated EVs
- PFRR represents the output power of the system’s other FR resources;
- PL indicates the frequency of the non-sensitive load;
- D stands for the coefficient of damping load;
- PEV,i indicates the power of the V2G network ith EV;
- N means the number of the EVs.
2.2. Characteristics of Frequency Regulation
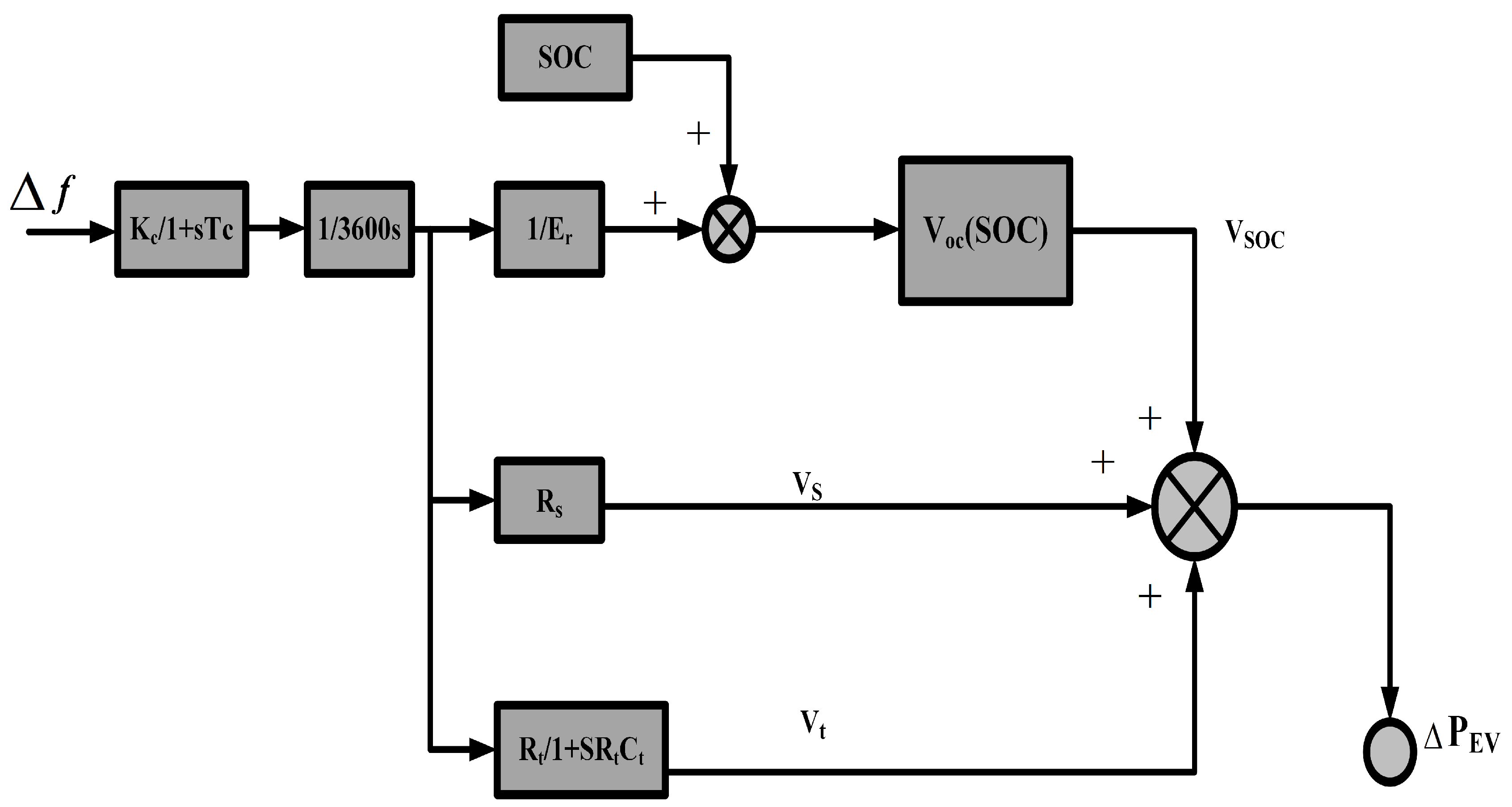
2.2.1. The Dynamic Characteristics of Power System Components
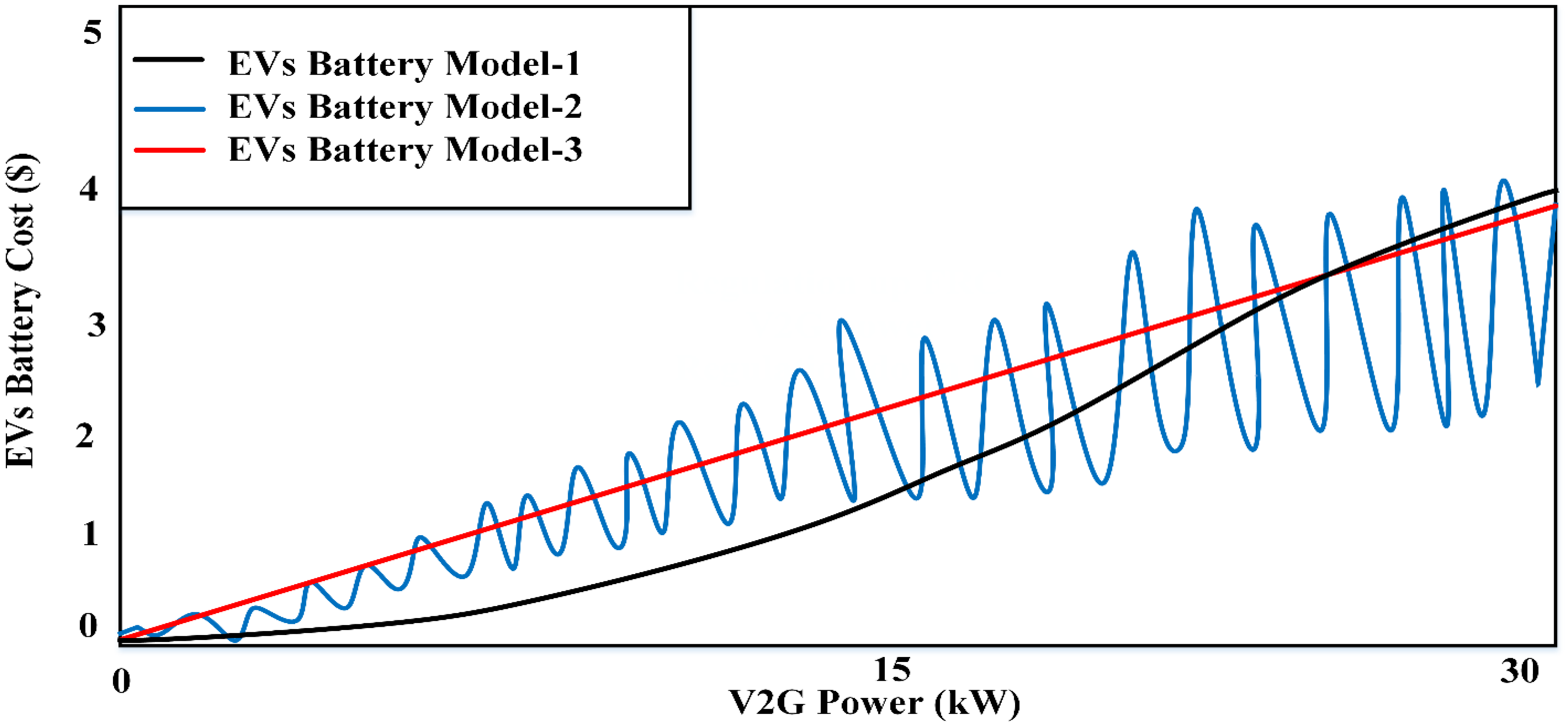
2.2.2. Cost Characteristic
- Cgt is represented as factor for the generation cost associated with the gth diesel generator (DG) during t time period;
- ts indicates the time when the generator operates for the participation in FR;
- te indicates time the generator participation in FR ends;
- ugt is 1 when the gth diesel generator (DG) is turned on during t time period and equal to 0 otherwise;
- Cfix,gt is the factor for the fixed generation costs of the gth generator during time t;
- ag and bg are the parameters for the generation cost in the FR;
- Ggt indicates the planned power generation of the gth diesel generator (DG) in the pre-contingency condition during time t;
- qpr,gt represents the primary reserve rate of the gth generator during t;
- rpr,gt denotes the gth generator scheduled primary reserve of the during t.
2.3. Constrants
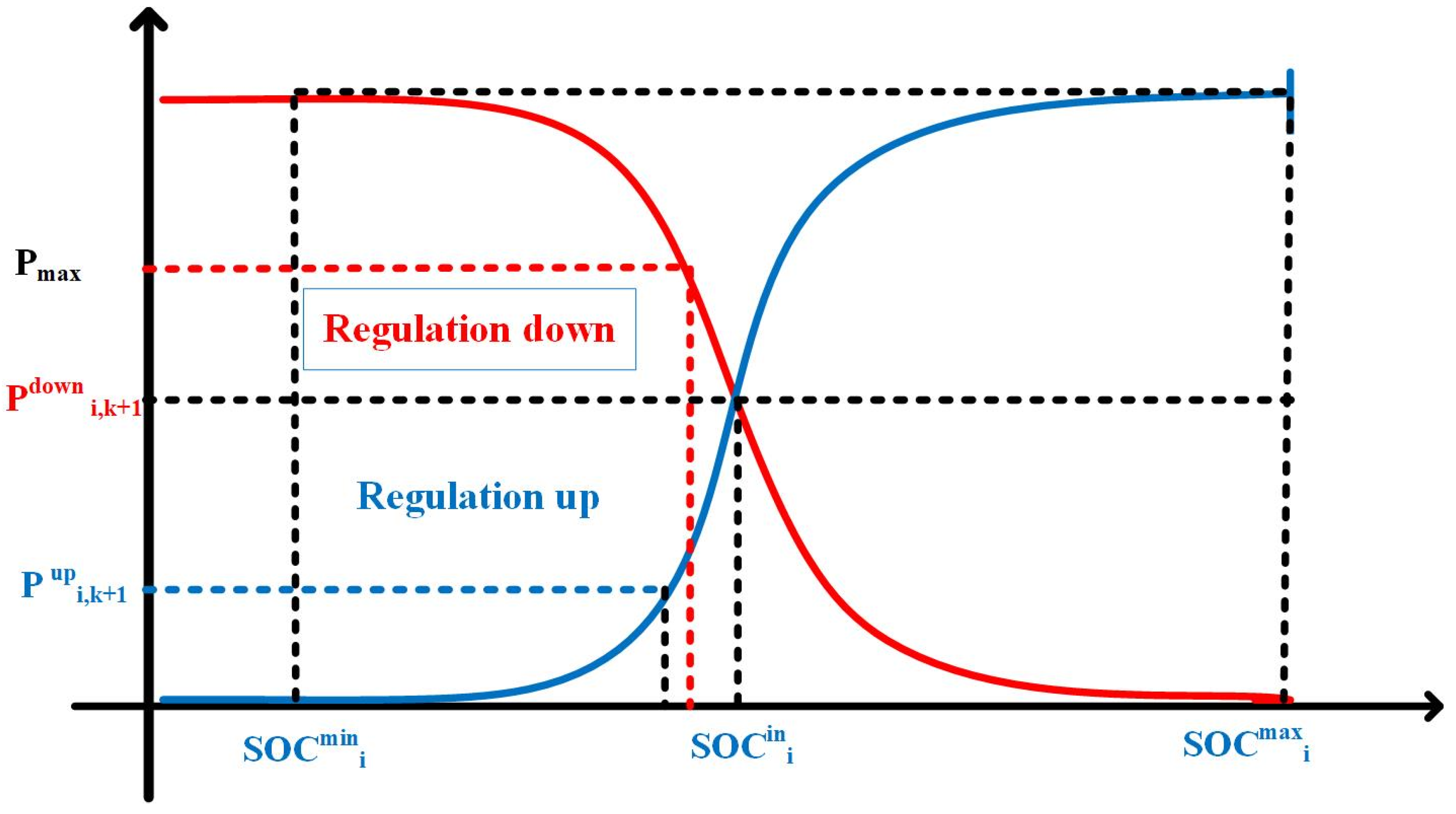
2.3.1. EV State of Charge
- SOCmax and SOCmin respectively represent the EVs maximum and minimum SOC, and the relation in (9) represents the setting for optimal performance.
- SOCini,i denotes the ith EV initial SOC;
- Ec,i is ith EV charging energy;
- Ed,i represents discharging energy of the ith EV for; and
- E0,i is the ith EV battery rated capacity.
2.3.2. Generator Power Output
2.3.3. Charging and Discharging Power of the EVs
- ΔPmaxD,i: the ith EV’s maximum discharging power during t time period;
- ΔPmaxC,i: the ith EV’s maximum charging power during t time period;
- ΔPV2GD,i and ΔPV2GC,i: respectively, the ith EV actual discharging and charging power;
- ζ and κ: loss efficiency coefficients for transmission, both having value less than 1;
- and : respectively, the discharging and charging efficiency coefficients;
- and : the ith EV discharging and charging power;
- Psti,down and Psti,up: respectively, the upper and lower limit capacity of the stith CS.NEV is represented as the number of EVs stay at CS.
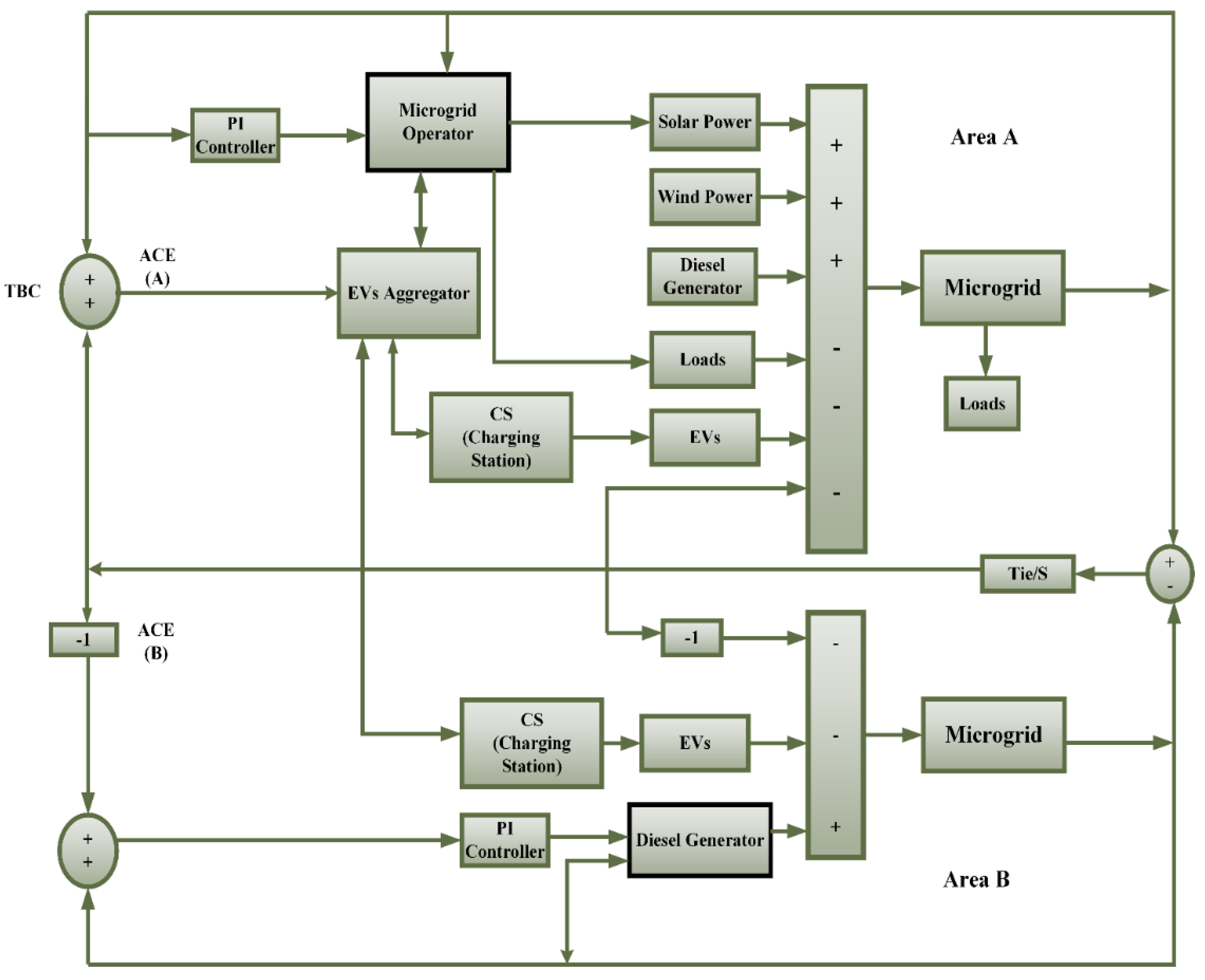
3. Proposed Optimization Strategy
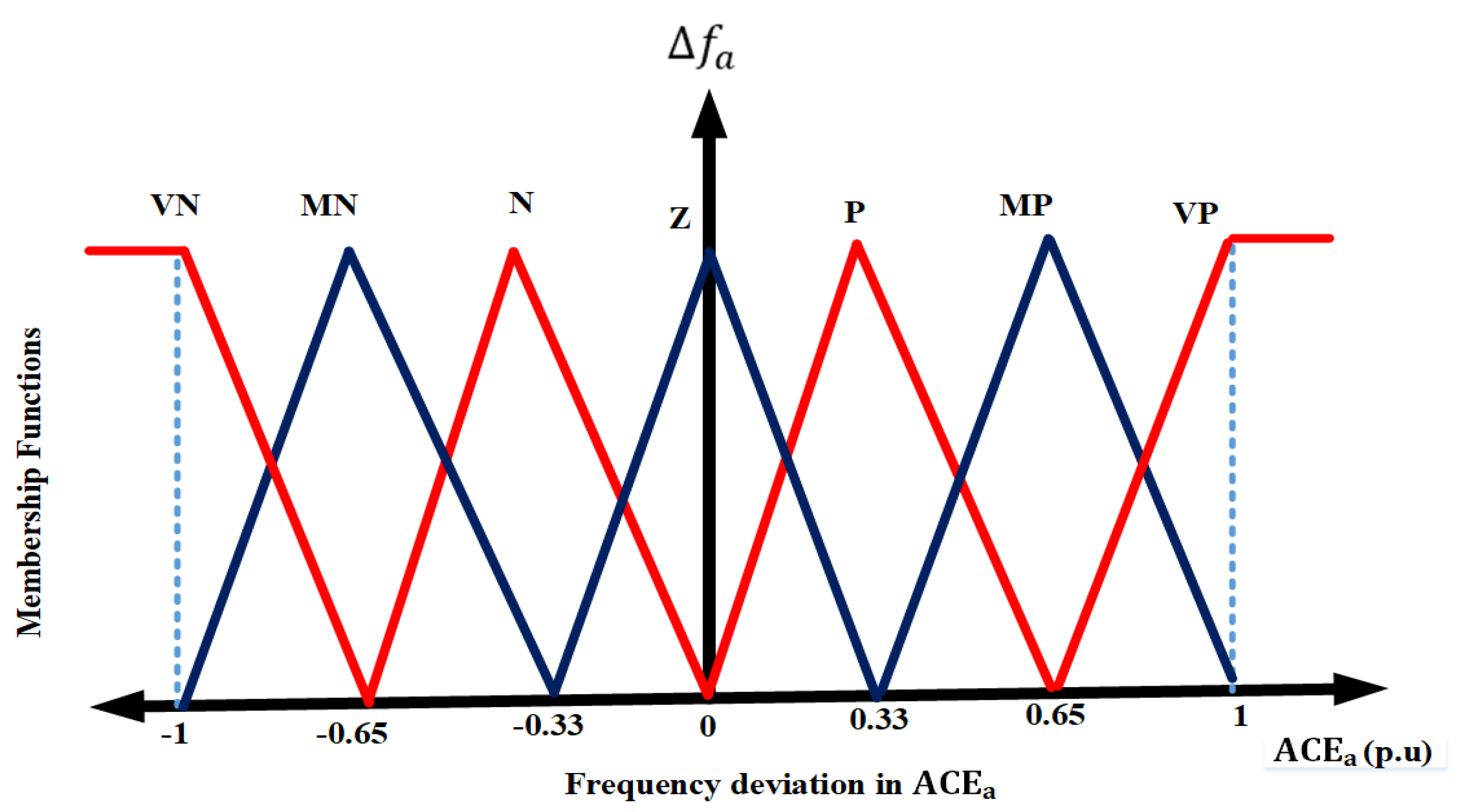
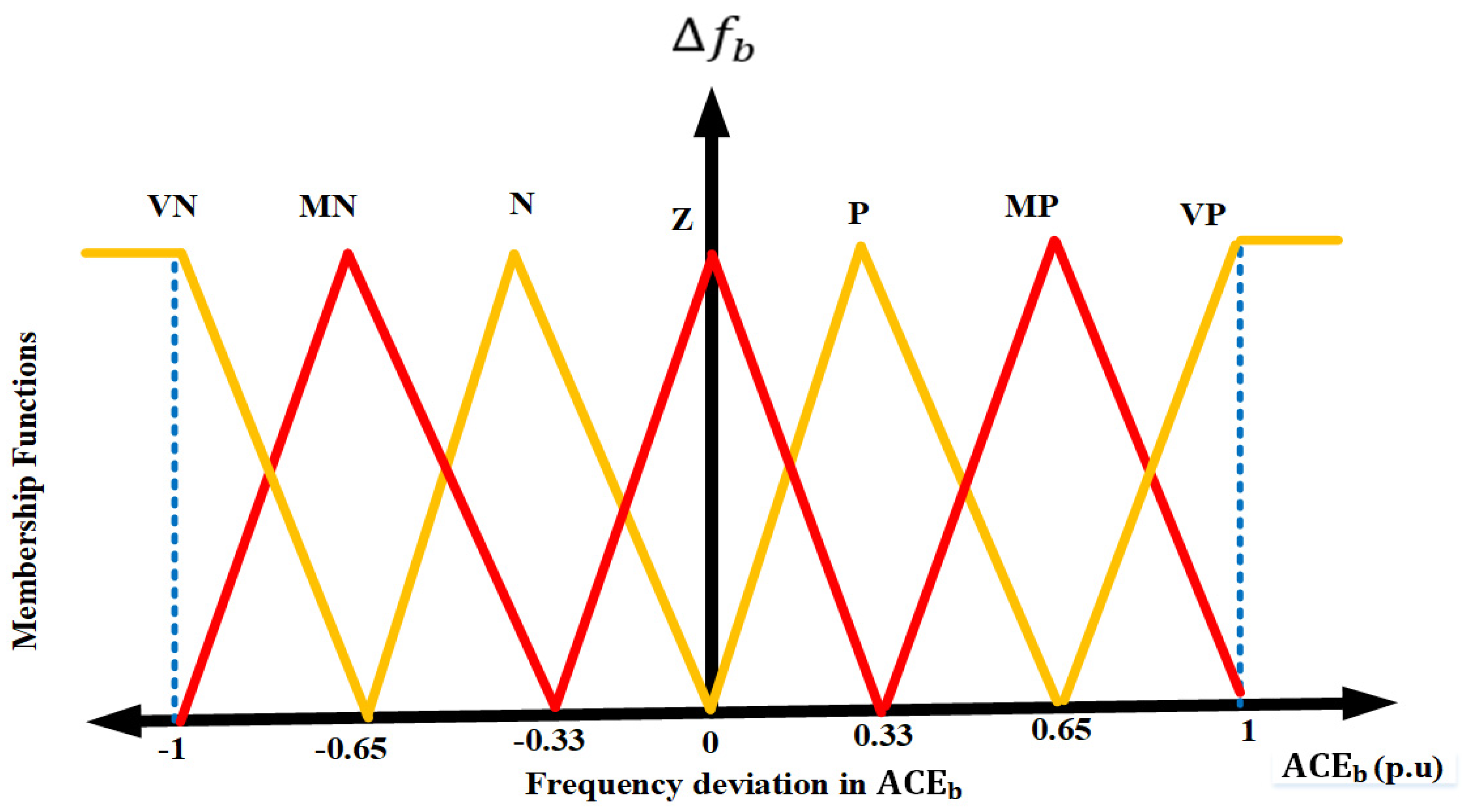
3.1. Fuzzy Logic Controller (FLC)
3.2. Particle Swarm Optimization (PSO)
4. Simulations and Results
4.1. Optimization and Analysis of Control Strategy
4.1.1. Normal State
4.1.2. Abnormal State
4.2. Simulation and Discussion
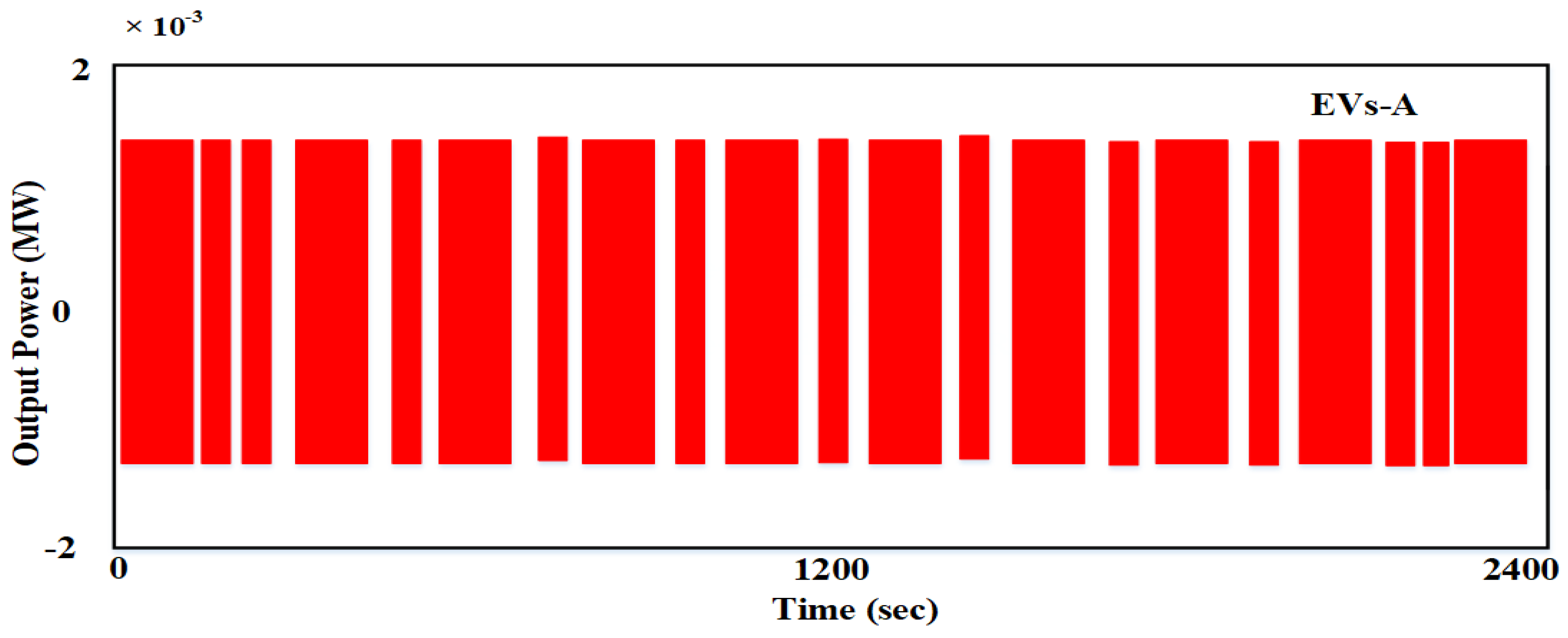
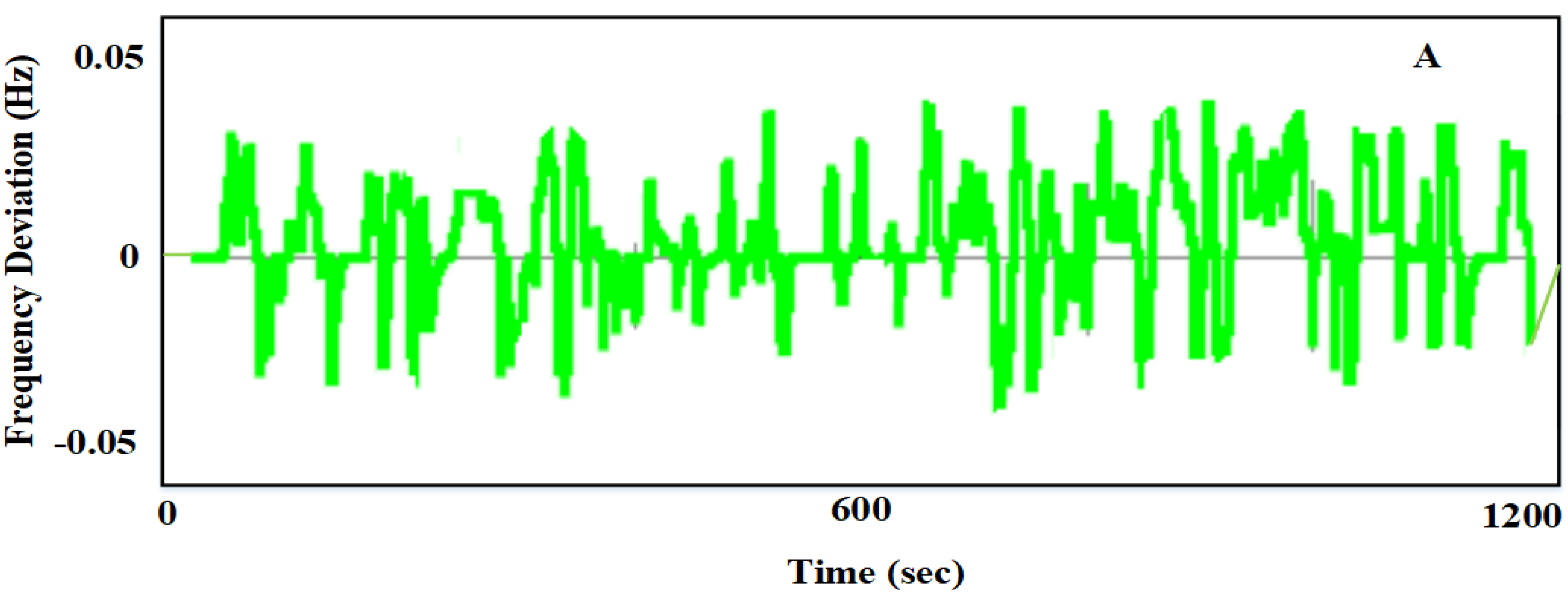
4.2.1. Normal State
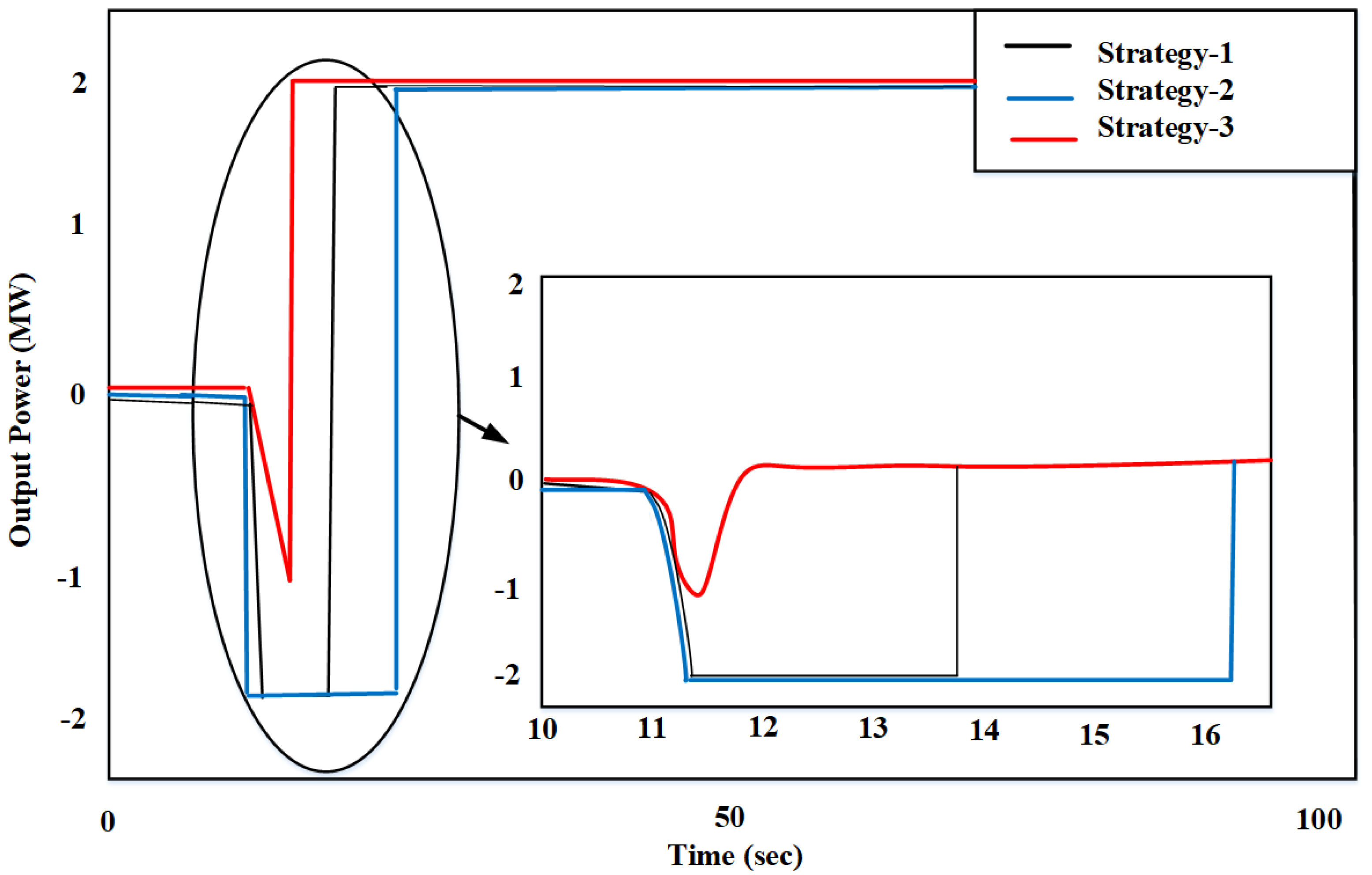
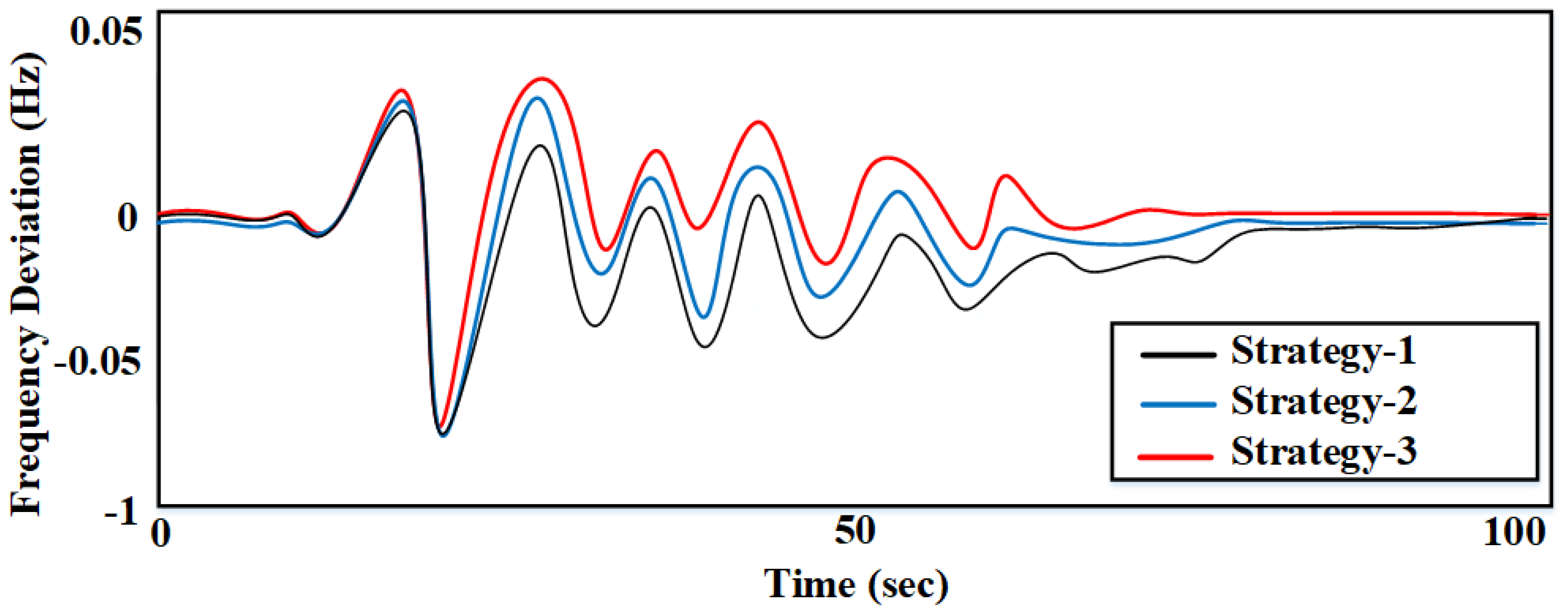
4.2.2. Abnormal State
5. Conclusions
6. Future Recommendations
- It would be fascinating to add EVs into the security-constrained unit commitment (SCUC) framework, which will describe the dynamic behavior of EVs during both primary and secondary frequency control.
- A procedure might be designed to better assure the requisite performance for the primary frequency control by simulation analysis.
- A suitable pricing mechanism might be established in spot marketplaces to characterize both power and associated services.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PSOSs | Power system operation states |
| EV | Electric vehicle |
| MG | Microgrid |
| FR | Frequency regulation |
| V2G | Vehicle-to-grid |
| FD | Frequency deviation |
| SOC | State of charge |
| PSO | Particle swarm optimization |
| FLC | Fuzzy logic control |
| RES | Renewable energy sources |
| GAOT | Genetic algorithm optimization toolbox |
| CSO | Charging station operator |
| DR | Demand response |
| DG | Diesel generator |
| ECP | Expected charging power |
| VN | Very negative |
| MN | Medium negative |
| MP | Medium positive |
| VP | Very positive |
| ACE | Area control error |
References
- Rehman, H.U.; Yan, X.; Abdelbaky, M.A.; Jan, M.U.; Iqbal, S. An advanced virtual synchronous generator control technique for frequency regulation of grid-connected PV system. Int. J. Electr. Power Energy Syst. 2021, 125, 106440. [Google Scholar] [CrossRef]
- Kazemi, M.V.; Sadati, S.J.; Gholamian, S.A. Adaptive Frequency Control of Microgrid Based on Fractional Order Control and a Data-Driven Control with Stability Analysis. IEEE Trans. Smart Grid 2021, 13, 381–392. [Google Scholar] [CrossRef]
- Ahmed, E.M.; Mohamed, E.A.; Elmelegi, A.; Aly, M.; Elbaksawi, O. Optimum modified fractional order controller for future electric vehicles and renewable energy-based interconnected power systems. IEEE Access 2021, 9, 29993–30010. [Google Scholar] [CrossRef]
- Zecchino, A.; D’Arco, S.; Endegnanew, A.G.; Korpås, M.; Marinelli, M. Enhanced primary frequency control from EVs: A fleet management strategy to mitigate effects of response discreteness. IET Smart Grid 2019, 2, 436–444. [Google Scholar] [CrossRef]
- Tushar, M.H.K.; Zeineddine, A.W.; Assi, C. Demand-side management by regulating charging and discharging of the EV, ESS, and utilizing renewable energy. IEEE Trans. Ind. Inform. 2017, 14, 117–126. [Google Scholar] [CrossRef]
- Yumiki, S.; Susuki, Y.; Oshikubo, Y.; Ota, Y.; Masegi, R.; Kawashima, A.; Ishigame, A.; Inagaki, S.; Suzuki, T. Autonomous Vehicle-to-Grid Design for Provision of Frequency Control Ancillary Service and Distribution Voltage Regulation. arXiv 2021, arXiv:2101.10518. [Google Scholar] [CrossRef]
- Di Somma, M.; Graditi, G.; Heydarian-Forushani, E.; Shafie-Khah, M.; Siano, P. Stochastic optimal scheduling of distributed energy resources with renewables considering economic and environmental aspects. Renew. Energy 2018, 116, 272–287. [Google Scholar] [CrossRef]
- Pal, A.; Bhattacharya, A.; Chakraborty, A.K. Placement of Public Fast-Charging Station and Solar Distributed Generation with Battery Energy Storage in Distribution Network Considering Uncertainties and Traffic Congestion. J. Energy Storage 2021, 41, 102939. [Google Scholar] [CrossRef]
- Di Somma, M.; Graditi, G.; Siano, P. Optimal bidding strategy for a DER aggregator in the day-ahead market in the presence of demand flexibility. IEEE Trans. Ind. Electron. 2018, 66, 1509–1519. [Google Scholar] [CrossRef]
- Nosratabadi, S.M.; Hooshmand, R.-A.; Gholipour, E. A comprehensive review on microgrid and virtual power plant concepts employed for distributed energy resources scheduling in power systems. Renew. Sustain. Energy Rev. 2017, 67, 341–363. [Google Scholar] [CrossRef]
- Aurangzeb, M.; Xin, A.; Iqbal, S.; Jan, M.U. An Evaluation of Flux-Coupling Type SFCL Placement in Hybrid Grid System Based on Power Quality Risk Index. IEEE Access 2020, 8, 98800–98809. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; Abdelbaky, M.A.; Rehman, H.U.; Salman, S.; Rizvi, S.A.A.; Aurangzeb, M. Aggregation of EVs for Primary Frequency Control of an Industrial Microgrid by Implementing Grid Regulation & Charger Controller. IEEE Access 2020, 8, 141977–141989. [Google Scholar] [CrossRef]
- Kong, Q.; Fowler, M.; Entchev, E.; Ribberink, H.; McCallum, R. The role of charging infrastructure in electric vehicle implementation within smart grids. Energies 2018, 11, 3362. [Google Scholar] [CrossRef] [Green Version]
- Habib, S.; Khan, M.M.; Abbas, F.; Ali, A.; Hashmi, K.; Shahid, M.U.; Bo, Q.; Tang, H. Risk Evaluation of Distribution Networks Considering Residential Load Forecasting with Stochastic Modeling of Electric Vehicles. Energy Technol. 2019, 7, 1900191. [Google Scholar] [CrossRef]
- Gazafroudi, A.S.; Corchado, J.M.; Keane, A.; Soroudi, A. Decentralised flexibility management for EVs. IET Renew. Power Gener. 2019, 13, 952–960. [Google Scholar] [CrossRef]
- Haque, A.; Kurukuru, V.S.B.; Khan, M.A. Stochastic methods for prediction of charging and discharging power of electric vehicles in vehicle-to-grid environment. IET Power Electron. 2019, 12, 3510–3520. [Google Scholar] [CrossRef]
- Hu, X.; Martinez, C.M.; Yang, Y. Charging, power management, and battery degradation mitigation in plug-in hybrid electric vehicles: A unified cost-optimal approach. Mech. Syst. Signal Process. 2017, 87, 4–16. [Google Scholar] [CrossRef]
- Cai, S.; Matsuhashi, R. Model Predictive Control for EV Aggregators Participating in System Frequency Regulation Market. IEEE Access 2021, 9, 80763–80771. [Google Scholar] [CrossRef]
- Jan, M.U.; Xin, A.; Rehman, H.U.; Abdelbaky, M.A.; Iqbal, S.; Aurangzeb, M. Frequency Regulation of an Isolated Microgrid With Electric Vehicles and Energy Storage System Integration Using Adaptive and Model Predictive Controllers. IEEE Access 2021, 9, 14958–14970. [Google Scholar] [CrossRef]
- Ali, H.H.; Fathy, A.; Kassem, A.M. Optimal model predictive control for LFC of multi-interconnected plants comprising renewable energy sources based on recent sooty terns approach. Sustain. Energy Technol. Assess. 2020, 42, 100844. [Google Scholar] [CrossRef]
- Dechanupaprittha, S.; Jamroen, C. Self-learning PSO based optimal EVs charging power control strategy for frequency stabilization considering frequency deviation and impact on EV owner. Sustain. Energy Grids Netw. 2021, 26, 100463. [Google Scholar] [CrossRef]
- Wang, J.; Bharati, G.R.; Paudyal, S.; Ceylan, O.; Bhattarai, B.P.; Myers, K.S. Coordinated electric vehicle charging with reactive power support to distribution grids. IEEE Trans. Ind. Inform. 2018, 15, 54–63. [Google Scholar] [CrossRef]
- Habib, S.; Khan, M.M.; Abbas, F.; Numan, M.; Ali, Y.; Tang, H.; Yan, X. A framework for stochastic estimation of electric vehicle charging behavior for risk assessment of distribution networks. Front. Energy 2019, 14, 298–317. [Google Scholar] [CrossRef]
- Shahab, M.; Wang, S.; Junejo, A.K. Improved control strategy for three-phase microgrid management with electric vehicles using multi objective optimization algorithm. Energies 2021, 14, 1146. [Google Scholar] [CrossRef]
- Jan, M.U.; Xin, A.; Abdelbaky, M.A.; Rehman, H.U.; Iqbal, S. Adaptive and Fuzzy PI Controllers Design for Frequency Regulation of Isolated Microgrid Integrated With Electric Vehicles. IEEE Access 2020, 8, 87621–87632. [Google Scholar] [CrossRef]
- Khooban, M.H.; Gheisarnejad, M. A novel deep reinforcement learning controller based type-II fuzzy system: Frequency regulation in microgrids. IEEE Trans. Emerg. Top. Comput. Intell. 2020, 5, 689–699. [Google Scholar] [CrossRef]
- Peng, C.; Zou, J.; Lian, L.; Li, L. An optimal dispatching strategy for V2G aggregator participating in supplementary frequency regulation considering EV driving demand and aggregator’s benefits. Appl. Energy 2017, 190, 591–599. [Google Scholar] [CrossRef]
- Khamies, M.; Magdy, G.; Kamel, S.; Khan, B. Optimal model predictive and linear quadratic gaussian control for frequency stability of power systems considering wind energy. IEEE Access 2021, 9, 116453–116474. [Google Scholar] [CrossRef]
- Iqbal, S.; Xin, A.; Jan, M.U.; Abdelbaky, M.A.; Rehman, H.U.; Salman, S.; Rizvi, S.A.A. V2G Strategy for Primary Frequency Control of an Industrial Microgrid Considering the Charging Station Operator. Electronics 2020, 9, 549. [Google Scholar] [CrossRef] [Green Version]
- Wang, K.; Qiao, Y.; Xie, L.; Li, J.; Lu, Z.; Yang, H. A Fuzzy Hierarchical Strategy for Improving Frequency Regulation of Battery Energy Storage System. J. Mod. Power Syst. Clean Energy 2021, 9, 689–698. [Google Scholar] [CrossRef]
- Dong, C.; Sun, J.; Wu, F.; Jia, H. Probability-Based Energy Reinforced Management of Electric Vehicle Aggregation in the Electrical Grid Frequency Regulation. IEEE Access 2020, 8, 110598–110610. [Google Scholar] [CrossRef]
- Zecchino, A.; Prostejovsky, A.M.; Ziras, C.; Marinelli, M. Large-scale provision of frequency control via V2G: The Bornholm power system case. Electr. Power Syst. Res. 2019, 170, 25–34. [Google Scholar] [CrossRef]
- Khan, W.; Ahmad, F.; Alam, M.S. Fast EV charging station integration with grid ensuring optimal and quality power exchange. Eng. Sci. Technol. Int. J. 2019, 22, 143–152. [Google Scholar] [CrossRef]
- Sánchez-Sáinz, H.; García-Vázquez, C.A.; Llorens Iborra, F.; Fernández-Ramírez, L.M. Methodology for the optimal design of a hybrid charging station of electric and fuel cell vehicles supplied by renewable energies and an energy storage system. Sustainability 2019, 11, 5743. [Google Scholar] [CrossRef] [Green Version]
- Shayeghi, H.; Rahnama, A.; Alhelou, H.H. Frequency control of fully-renewable interconnected microgrid using fuzzy cascade controller with demand response program considering. Energy Rep. 2021, 7, 6077–6094. [Google Scholar] [CrossRef]































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ∆ACE | ∆f | |||||||
|---|---|---|---|---|---|---|---|---|
| VN | MN | N | Z | P | MP | VP | ||
| VN | VP | VP | VP | MP | MP | P | Z | |
| MN | VP | MP | MP | MP | P | Z | N | |
| N | VP | MP | P | P | Z | N | MN | |
| Z | MP | MP | P | Z | N | MN | MN | |
| P | MP | P | Z | N | N | MN | VN | |
| MP | P | Z | N | MN | MN | MN | VN | |
| VP | Z | N | MN | MN | VN | VN | VN |
| Parametric Values | Value | Parametric Values | Value |
|---|---|---|---|
| Prosed network (MW) | 10 | frequency (Hz) | 50 |
| TG-a, and TG-b (s) | 0.5 | Da and Db (MW/Hz) | 1/6 |
| TCH-a, and TCH-b | 0.8 | Ra and Rb (Hz/MW) | 0.3 |
| TRH-a, and TRH-b (s) | 10 | kr-a and kr-b (MW/Hz/s) | 2/15 |
| Ma, and Mb (MW/Hz/s) | 2.0 | FHP-a, and FHP-b | 30% |
| Parametric Values | Value |
|---|---|
| Coefficient of EVs frequency kEV-a, kEV-b (MW/Hz) | 1.12 |
| Battery gain of electric vehicle | 1 |
| Times constant of EV battery filter | 1 s |
| Area-A EV fleet | 800 |
| Area-B EV fleet | 800 |
| Area-A generators | 1 |
| Area-B generators | 1 |
| Parametric Symbols | Value | Electric Vehicle State of Charge | Quantity |
|---|---|---|---|
| Battery capacity (mAH) | 50 | 90 | 40 |
| State of charge minimum (%) | 0.1 | 80 | 65 |
| State of charge of maximum (%) | 0.9 | 70 | 92 |
| SO io | 0.6 | 60 | 275 |
| 25 | 50 | 105 | |
K ζ’ | 25 0.8 0.8 | 40 30 20 10 | 75 55 25 30 |
| Parametric Symbols | Value | Electric Vehicle State of Charge | Quantity |
|---|---|---|---|
| Cit ($/h) | 10 | C1, C2 | 0.8 |
| ait ($/MWh) | 9 | r1, r2 | [0,1] |
| bit ($/MWh2) | 0 | vx, mj, vx, EVj | [−1,1] |
| Qpr,it ($/MWh) | 10 | Particles | 100 |
| α ($/MWh2) | 3.8 × 10−4 | Iterations | 100 |
| β ($/MWh2) | 7.6 × 10−4 | ωM, ωEV | 1 |
| ζnormal,−fmaximum | 1 | ζabnormal,−faverage | 1 |
| ζnormal,−faverage | 1 | ζabnormal,−faverage | 1 |
| ζnormal,−cost | 1 | ζabnormal,−t | 1 |
| Parametric Values | Value | Parametric Values | Value | |
|---|---|---|---|---|
| Frequency deviation max (FD) (Hz) | 0.0553 | 0.0543 | 0.0549 | |
| Frequency deviation avg (FD) (Hz) | 0.0121 | 0.0123 | 0.0105 | |
| Normal state | Frequency regulation cost of gen | 275.18 | 210.35 | 230.01 |
| Frequency regulation cost of electric vehicles ($) | 540.38 | 480.62 | 0 | |
| Total Cost ($) | 815.50 | 695.97 | 230.00 | |
| Frequency deviation max (FD) (Hz) | 0.9568 | 0.9543 | 0.9346 | |
| Abnormal state | Frequency deviation avg (FD) (Hz) | 0.0133 | 0.0133 | 0.0095 |
| Restore time (s) | 84.25 | 84.24 | 42.99 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iqbal, S.; Habib, S.; Khan, N.H.; Ali, M.; Aurangzeb, M.; Ahmed, E.M. Electric Vehicles Aggregation for Frequency Control of Microgrid under Various Operation Conditions Using an Optimal Coordinated Strategy. Sustainability 2022, 14, 3108. https://doi.org/10.3390/su14053108
Iqbal S, Habib S, Khan NH, Ali M, Aurangzeb M, Ahmed EM. Electric Vehicles Aggregation for Frequency Control of Microgrid under Various Operation Conditions Using an Optimal Coordinated Strategy. Sustainability. 2022; 14(5):3108. https://doi.org/10.3390/su14053108
Chicago/Turabian StyleIqbal, Sheeraz, Salman Habib, Noor Habib Khan, Muhammad Ali, Muhammad Aurangzeb, and Emad M. Ahmed. 2022. "Electric Vehicles Aggregation for Frequency Control of Microgrid under Various Operation Conditions Using an Optimal Coordinated Strategy" Sustainability 14, no. 5: 3108. https://doi.org/10.3390/su14053108