

Novel COVID-19 Based Optimization Algorithm (C-19BOA) for Performance Improvement of Power Systems
 , , , and
, , , and
Abstract
:
1. Introduction
Related Works
2. Contributions/Novelty of the Present Study
- 1.
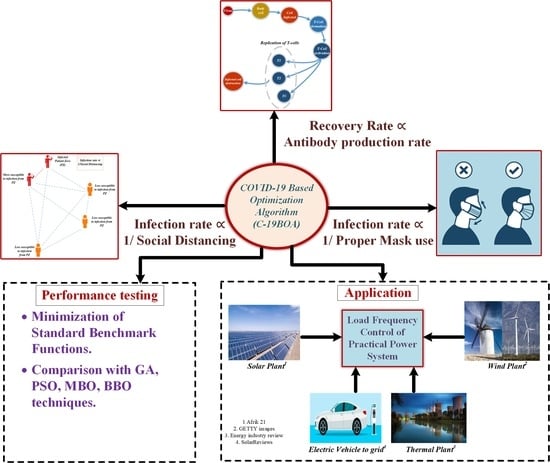
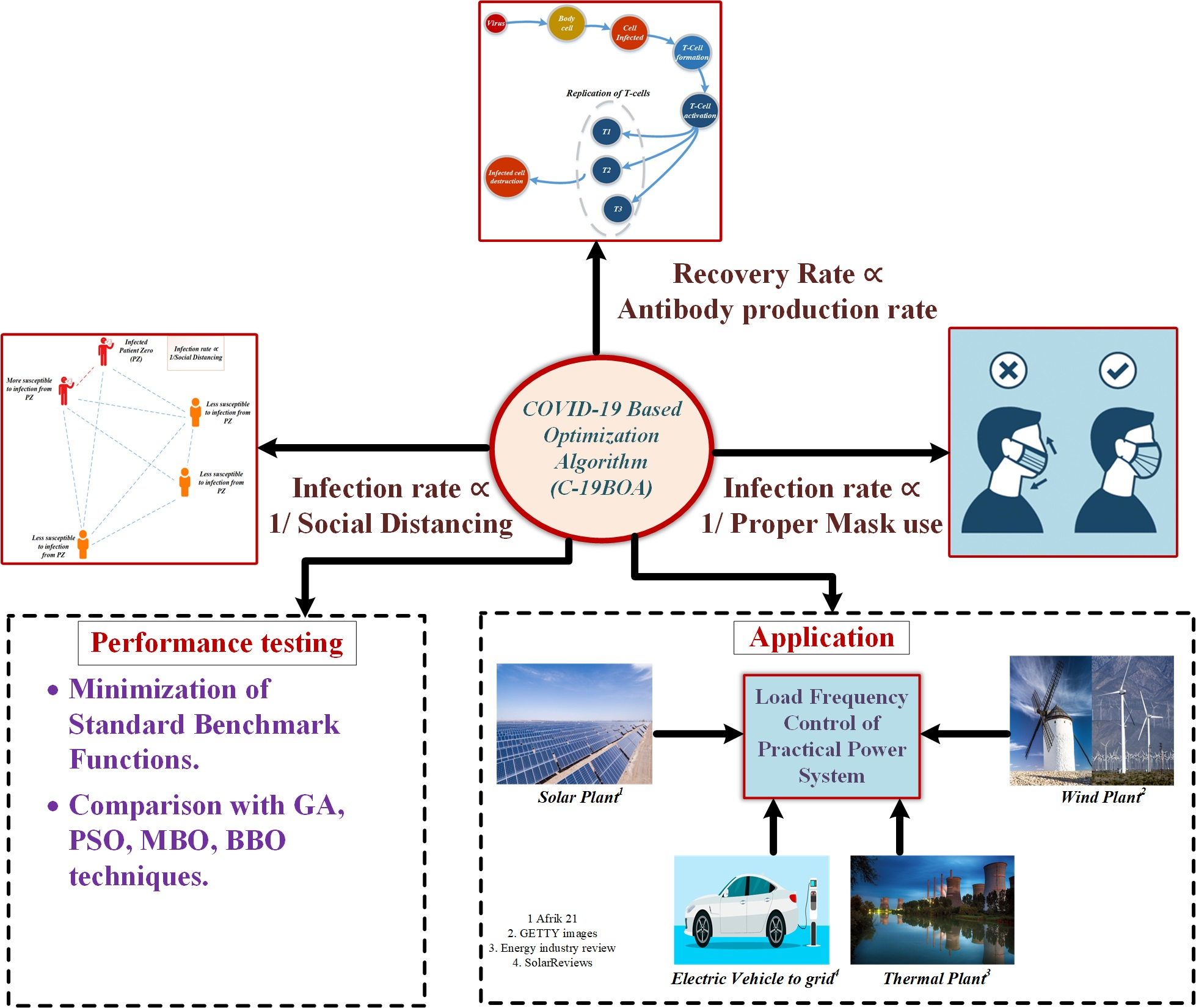
- A population-based, nature-inspired COVID-19 Based Optimization Algorithm (C-19BOA) is introduced based on the behavior of present day coronavirus disease propagation. The proposed algorithm mimics the virus infection propagation and decimation phenomenon in nature. The algorithm is modeled based on some already known containment factors such as social distancing, use of masks and antibody rate.
- 2.
- A 2nd order Active Disturbance Rejection controller (ADRC) with a state estimation-based observer is developed. The performance of ADRC is compared with an industrial applied PID controller on a hybrid power system. The dominance of the proposed controller is verified with respect to an industrially applied PID controller based on system dynamic performance analysis.
- 3.
- Application of the proposed C-19BOA for optimizing the gains of 2nd order ADRC and PID controllers for effective frequency and tie-line power regulation capability of a power system. The power system is subjected to some practical case scenarios in order to check the applicability of the proposed optimization algorithm.
3. Objectives of the Present Study
- 1.
- To develop a population-based, nature-inspired COVID-19 Based Optimization Algorithm (C-19BOA) based on the behavior of present-day coronavirus disease propagation.
- 2.
- To compare and authenticate the performance of C-19BOA with established optimization algorithms available in the literature, based on the convergence for IEE standard mathematical benchmark functions.
- 3.
- To validate the performance of C-19BOA on optimizing the 2nd order ADRC and PID controller gains in order to improve the performance of a practical power system.
- 4.
- To check the robustness of C-19BOA optimized ADRC and PID controllers for alterations in power system parameters with respect to nominal conditions.
4. Paper Organization
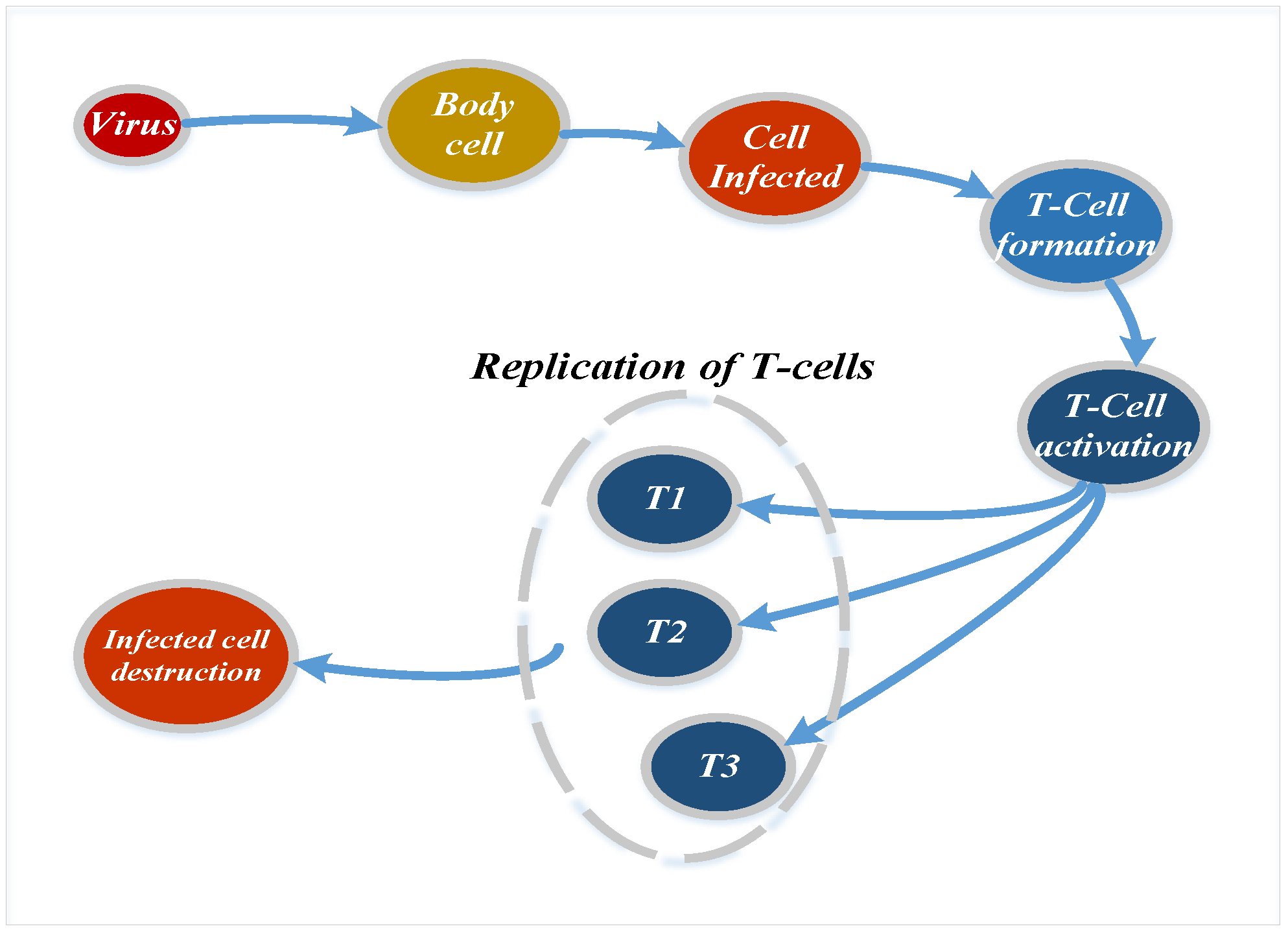
5. COVID-19 Based Optimization Algorithm (C-19BOA) Methodology
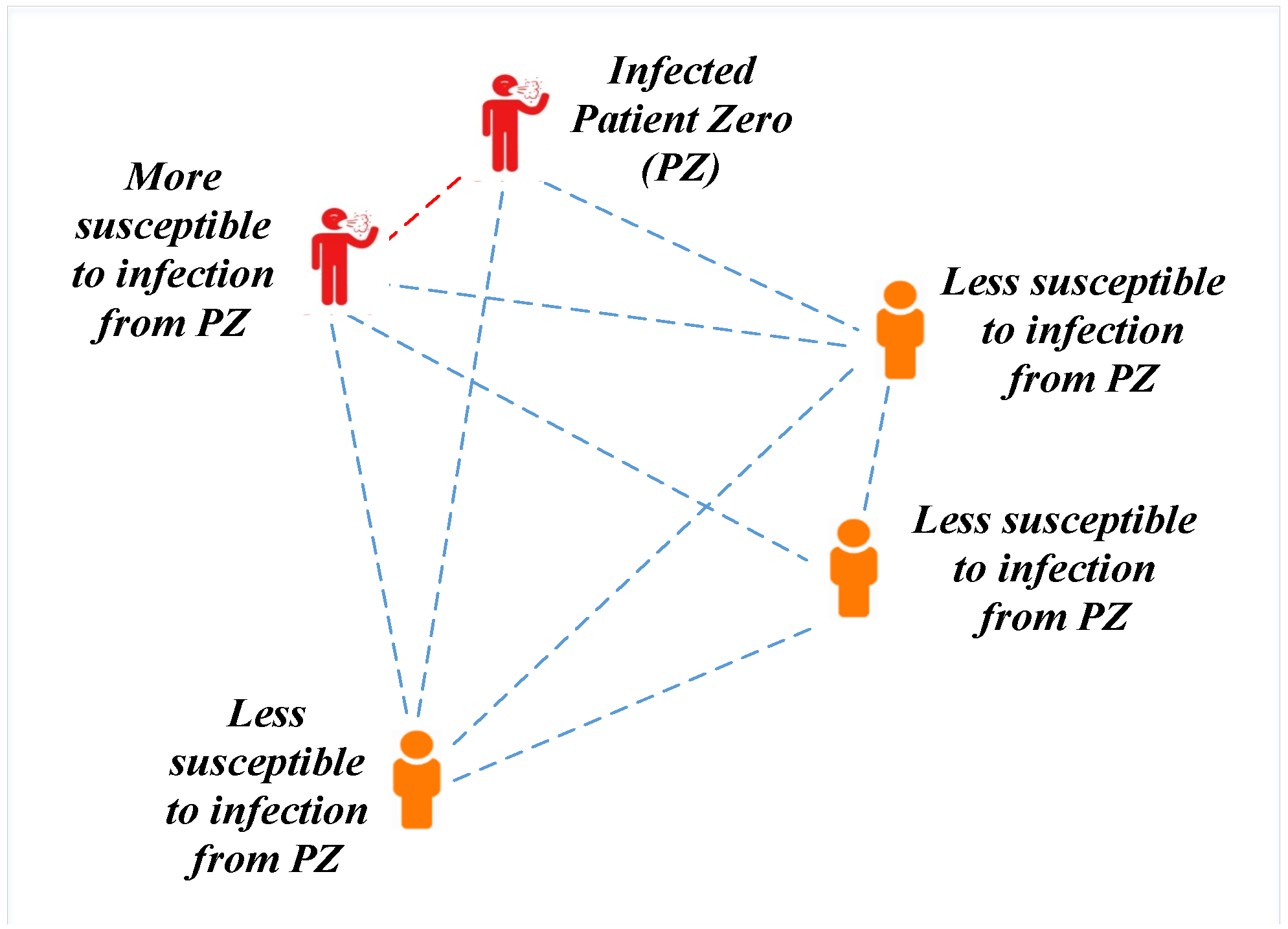
5.1. Initial Population
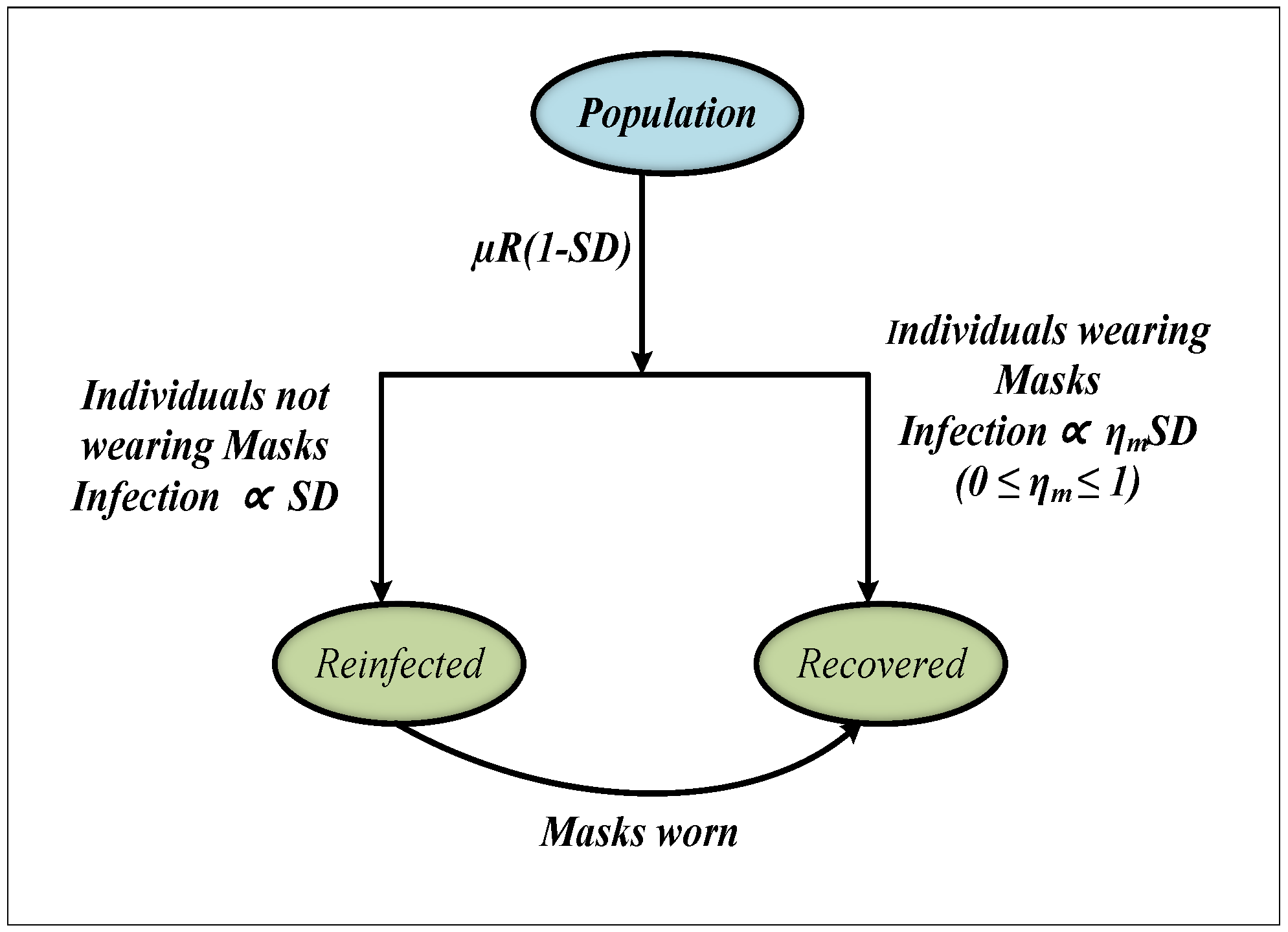
5.2. Containment Factors
- AR symbolizes the infection killing rate of cells by immune response due to evolved antibody.
- K is the maximum carrying capacity of virus replication.
- r is the replication rate.
- c is the rate at which virus is cleared.
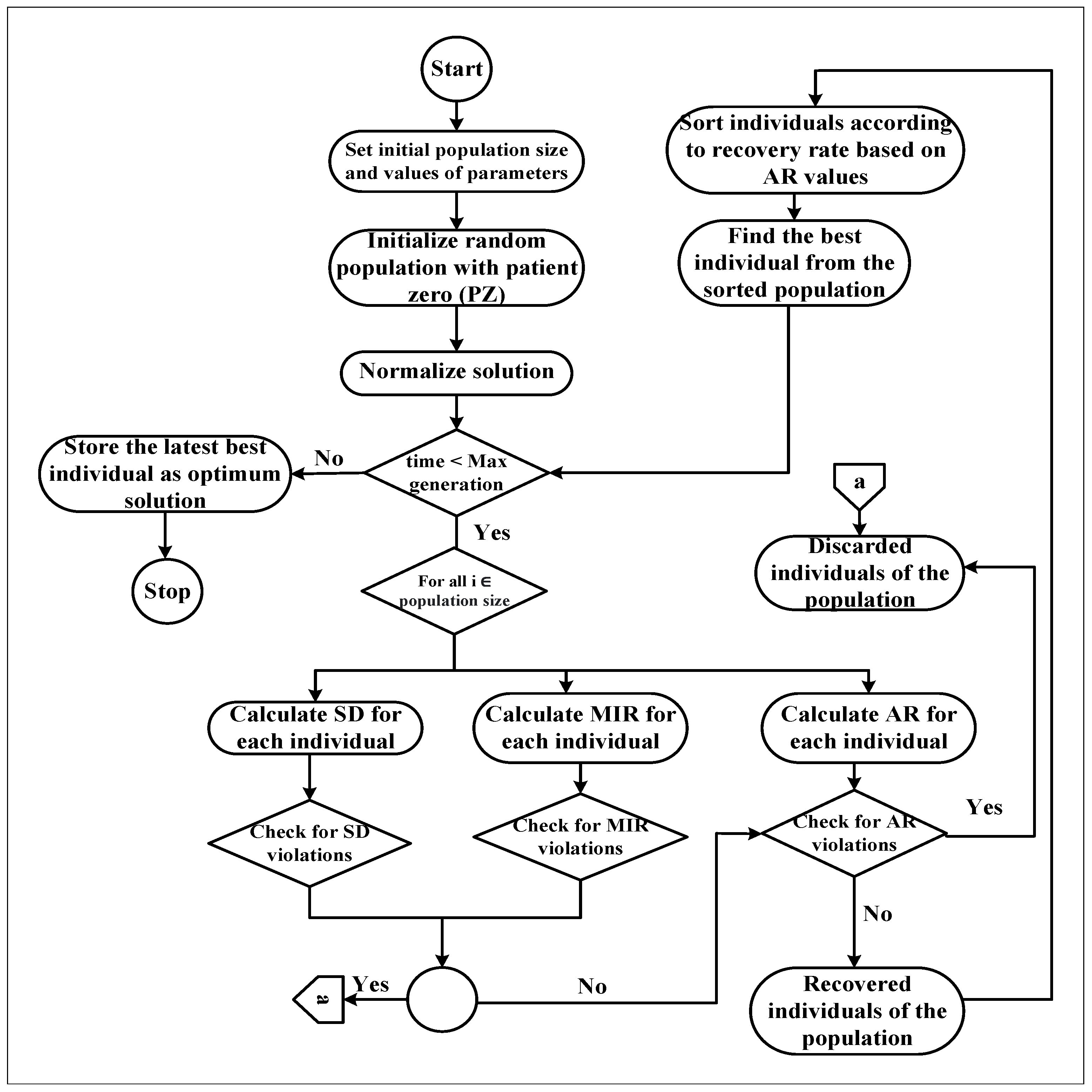
5.3. Procedure and Flowchart for C-19BOA
- 1.
- Generate initial population with PZ as infected.
- 2.
- Normalize population.
- 3.
- For (time < iteration limit)
- 4.
- 5.
- Check violations for SD and MIR.Individuals with SD < and MIR < are reinfected and discarded. Others go for AR check.
- 6.
- Calculate AR of individuals in the population using (9).
- 7.
- Individuals having AR > are treated as recovered. However, individuals with AR < are unhealthy and discarded.
- 8.
- The recovered population are sorted according to their recovery rate. Store the Best individual from the sorted population having a maximum recovery rate.
- 9.
- Continue until point no. 3 is terminated.
- 10.
- The latest Best individual is the final optimum solution.
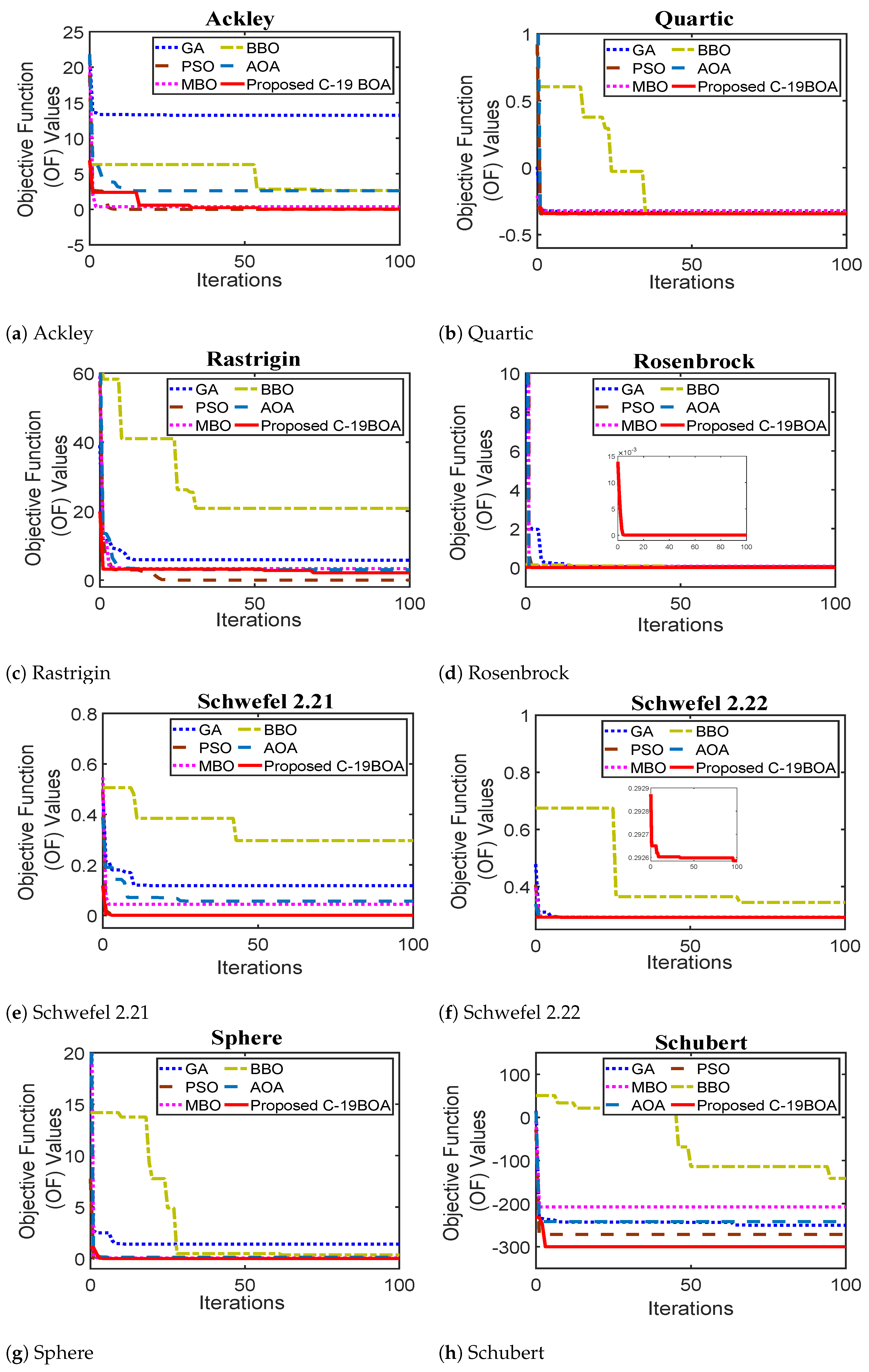
6. Performance Evaluation of Proposed C-19BOA on Standard Benchmark Functions
6.1. Standard Mathematical Benchmark Functions
6.2. Results Analysis of Benchmark Functions
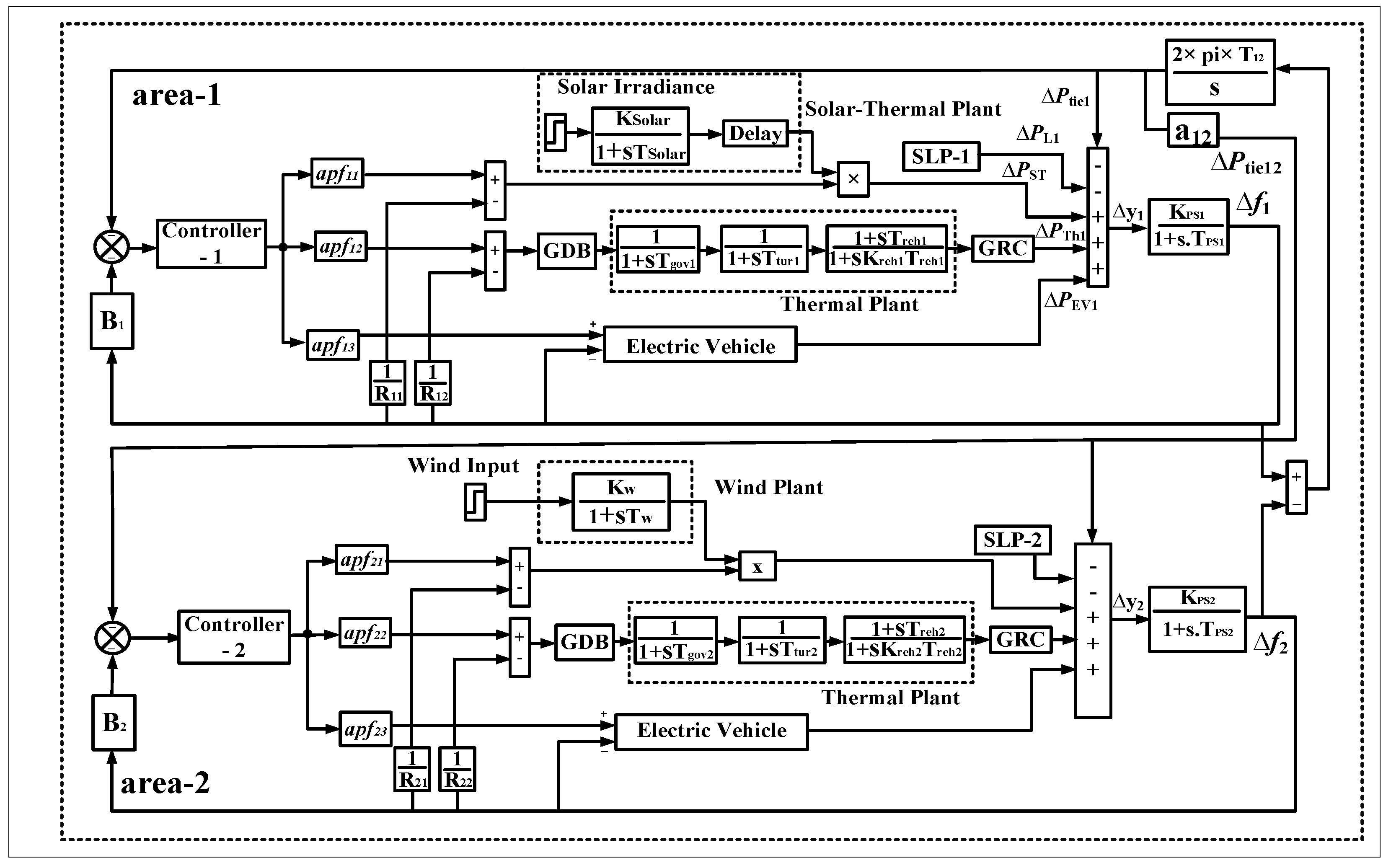
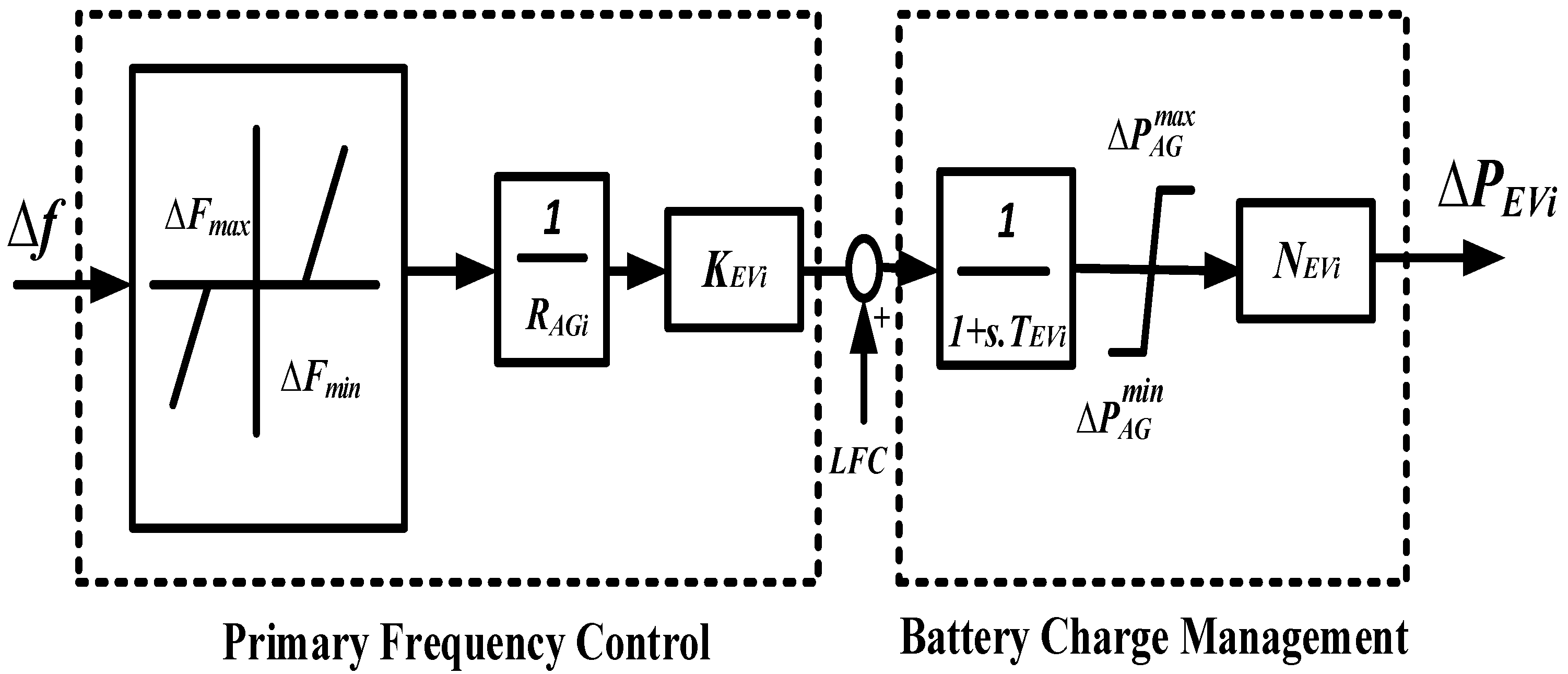
7. Performance Evaluation of Proposed C-19BOA on Modern Power System Control Operation
7.1. State of the Art: Power System Modeling
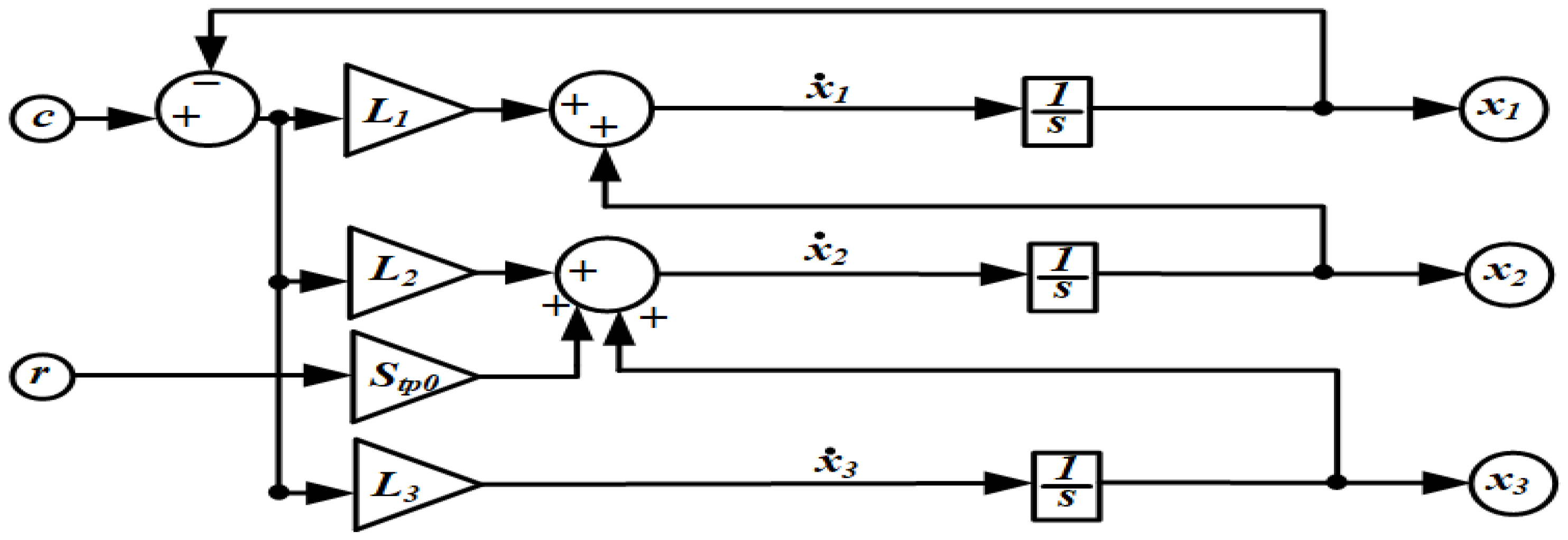
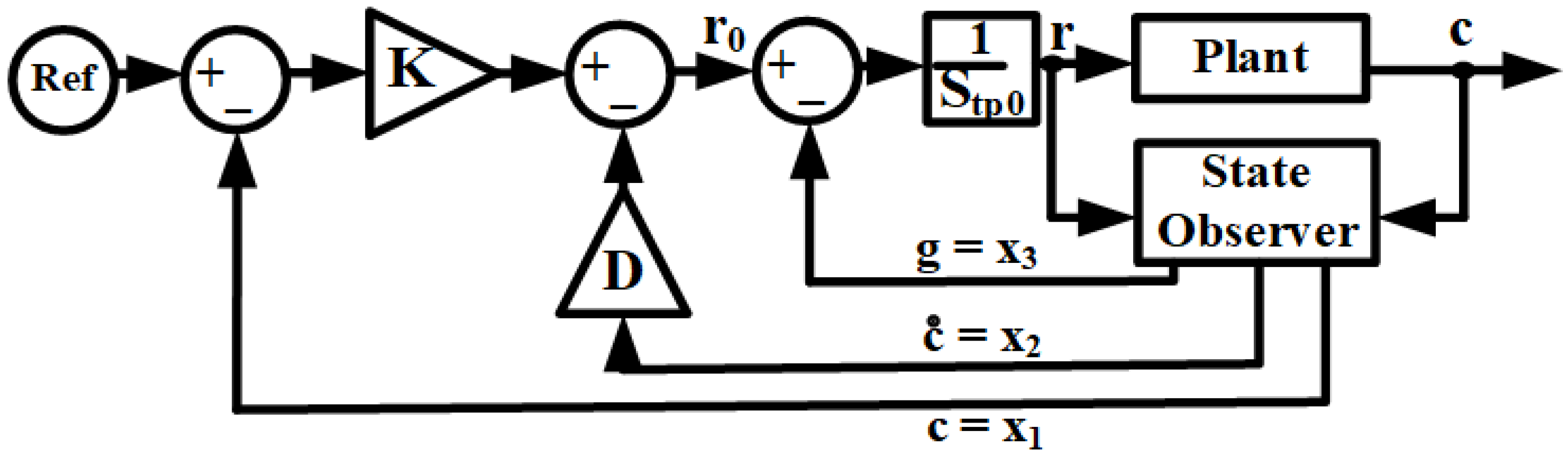
7.2. Design and Modeling of 2nd Order Active Disturbance Rejection Controller (ADRC)
7.3. Power System Dynamic Behaviour Using PID Controller
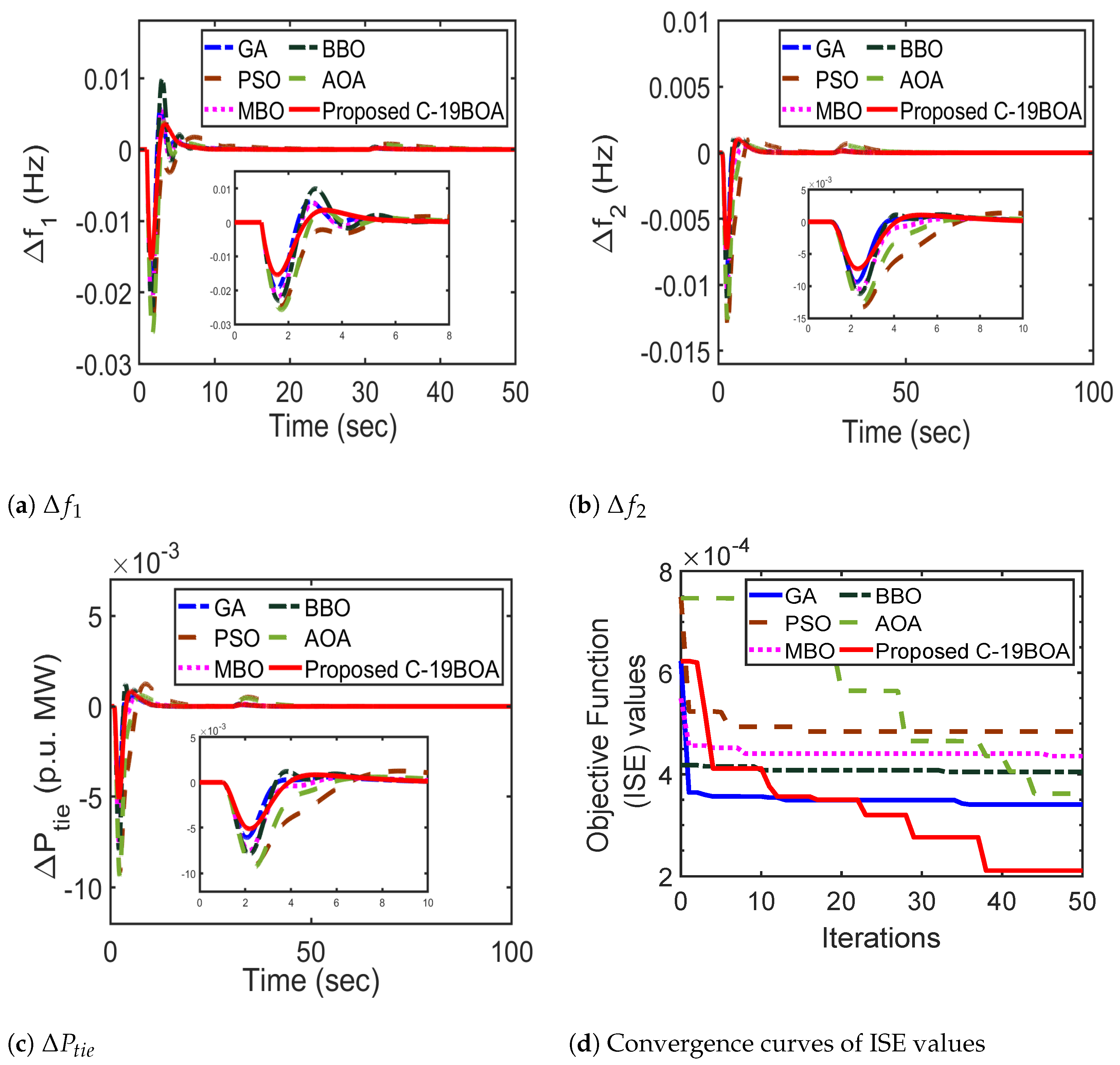
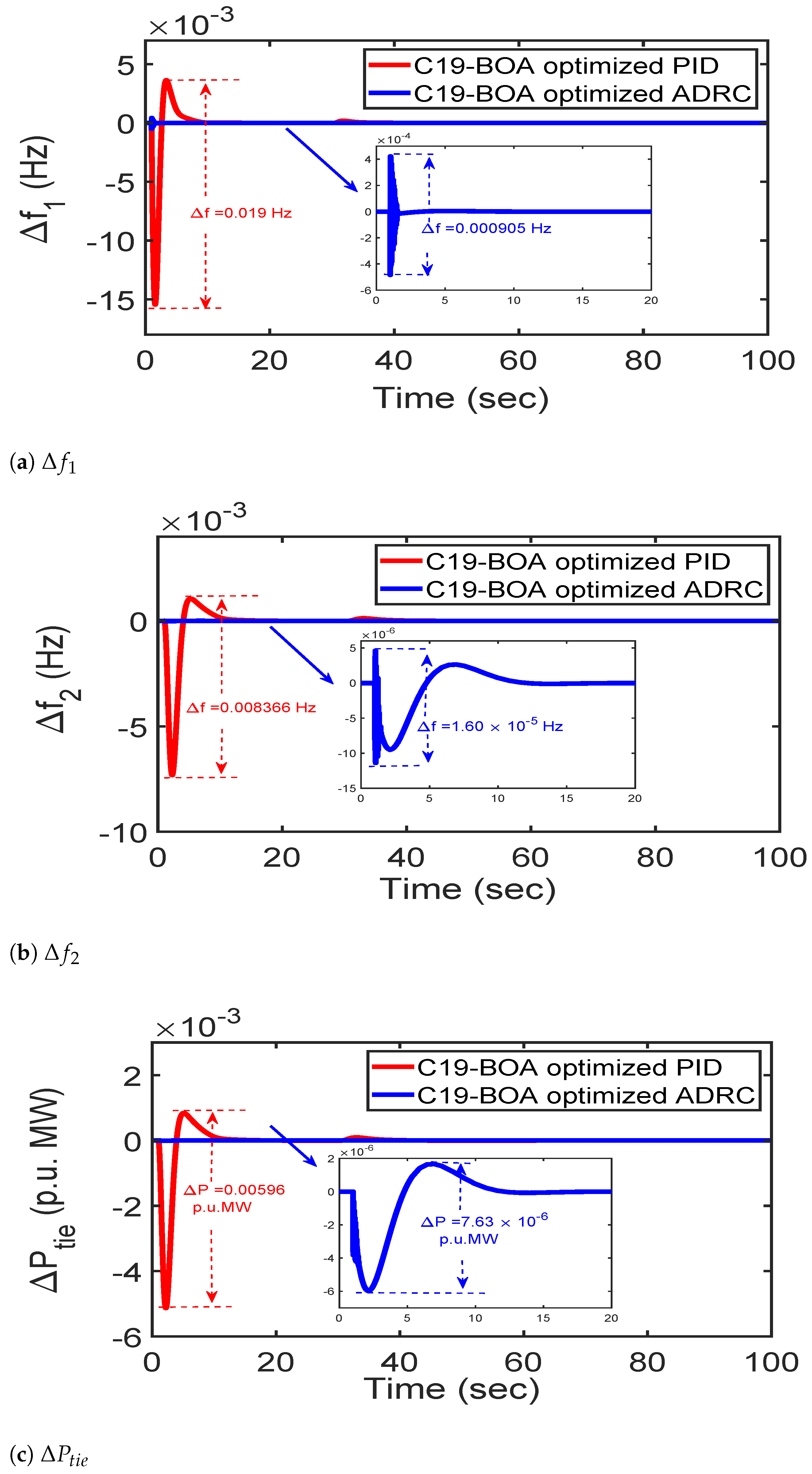
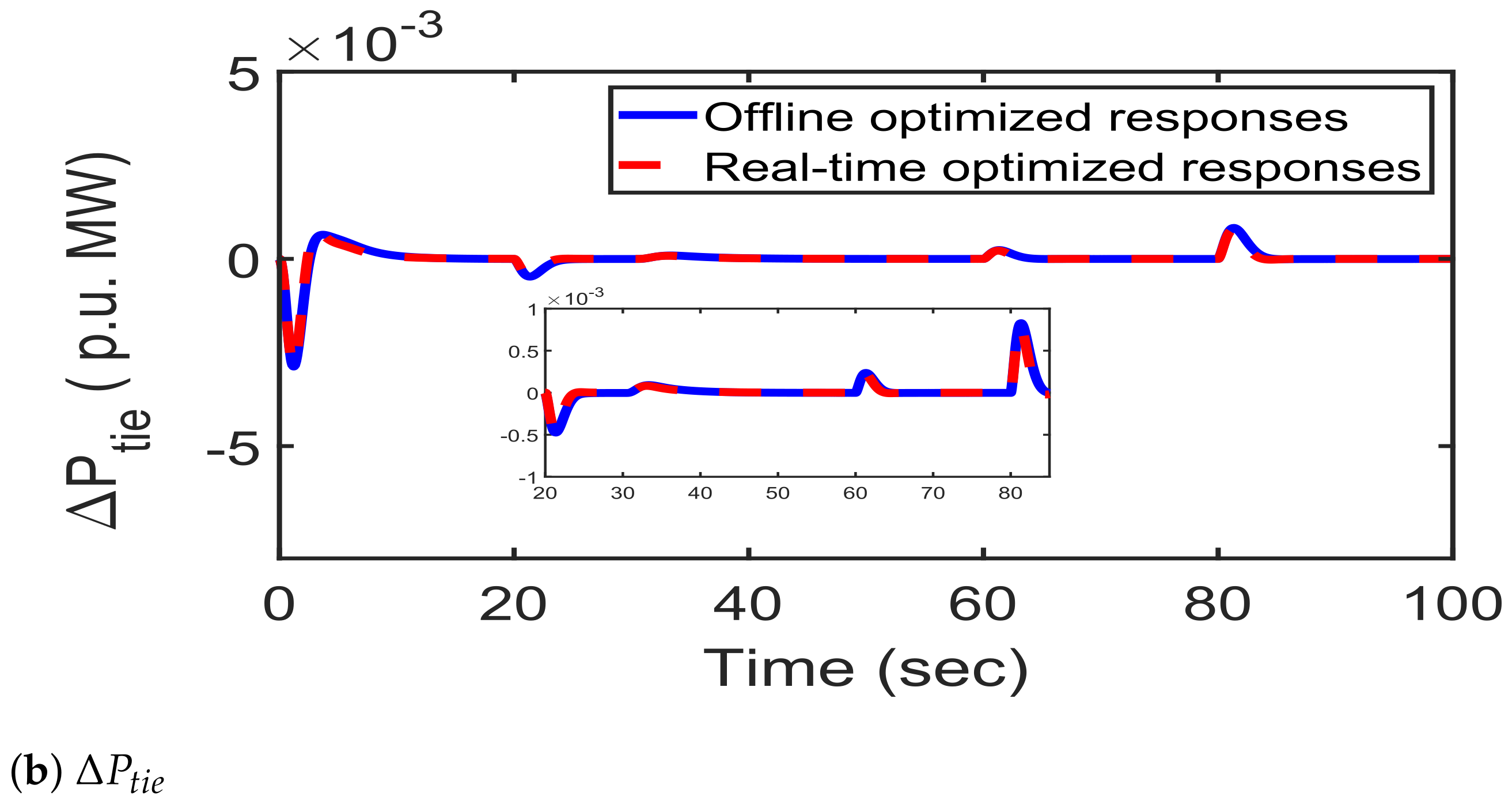
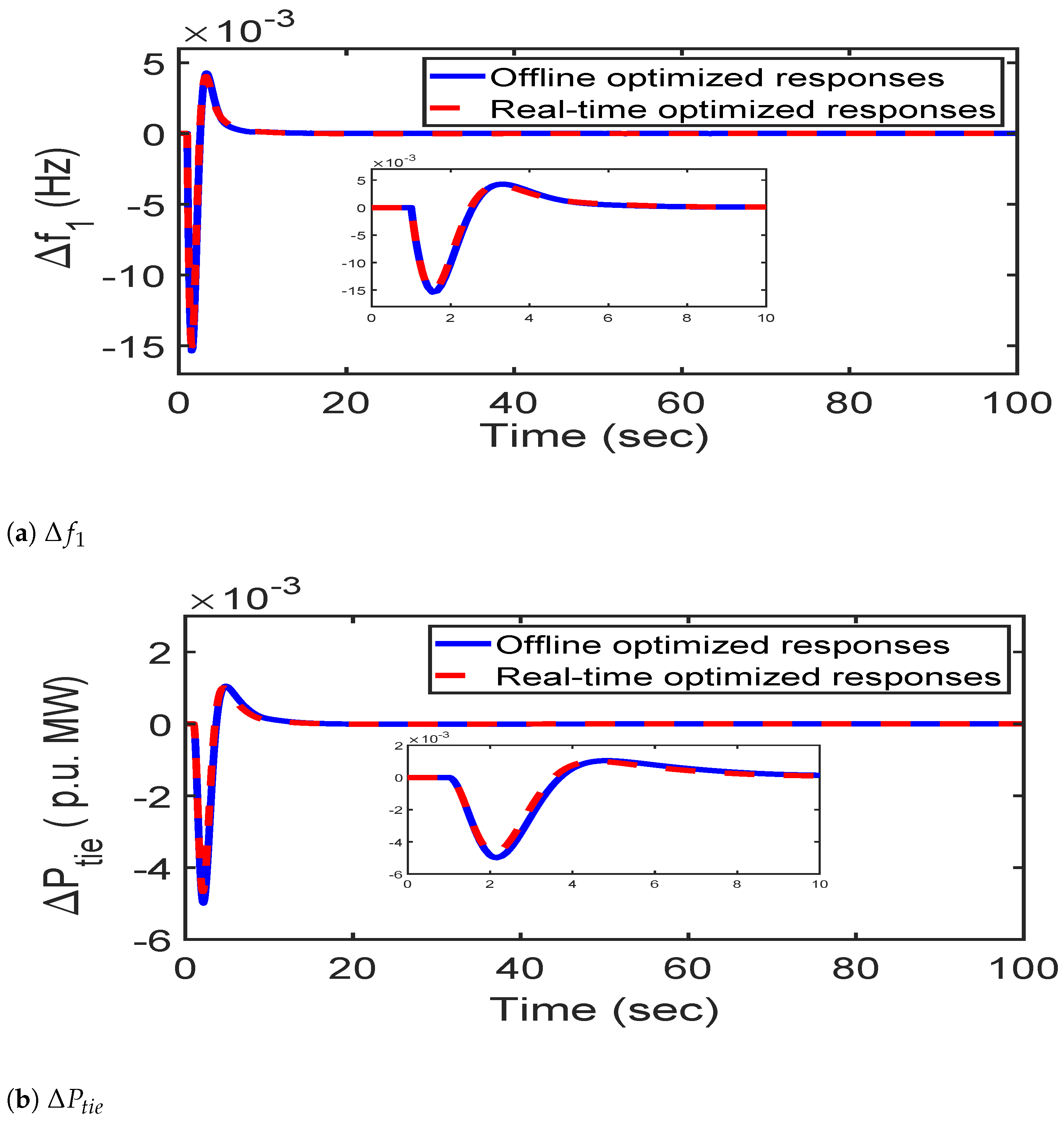
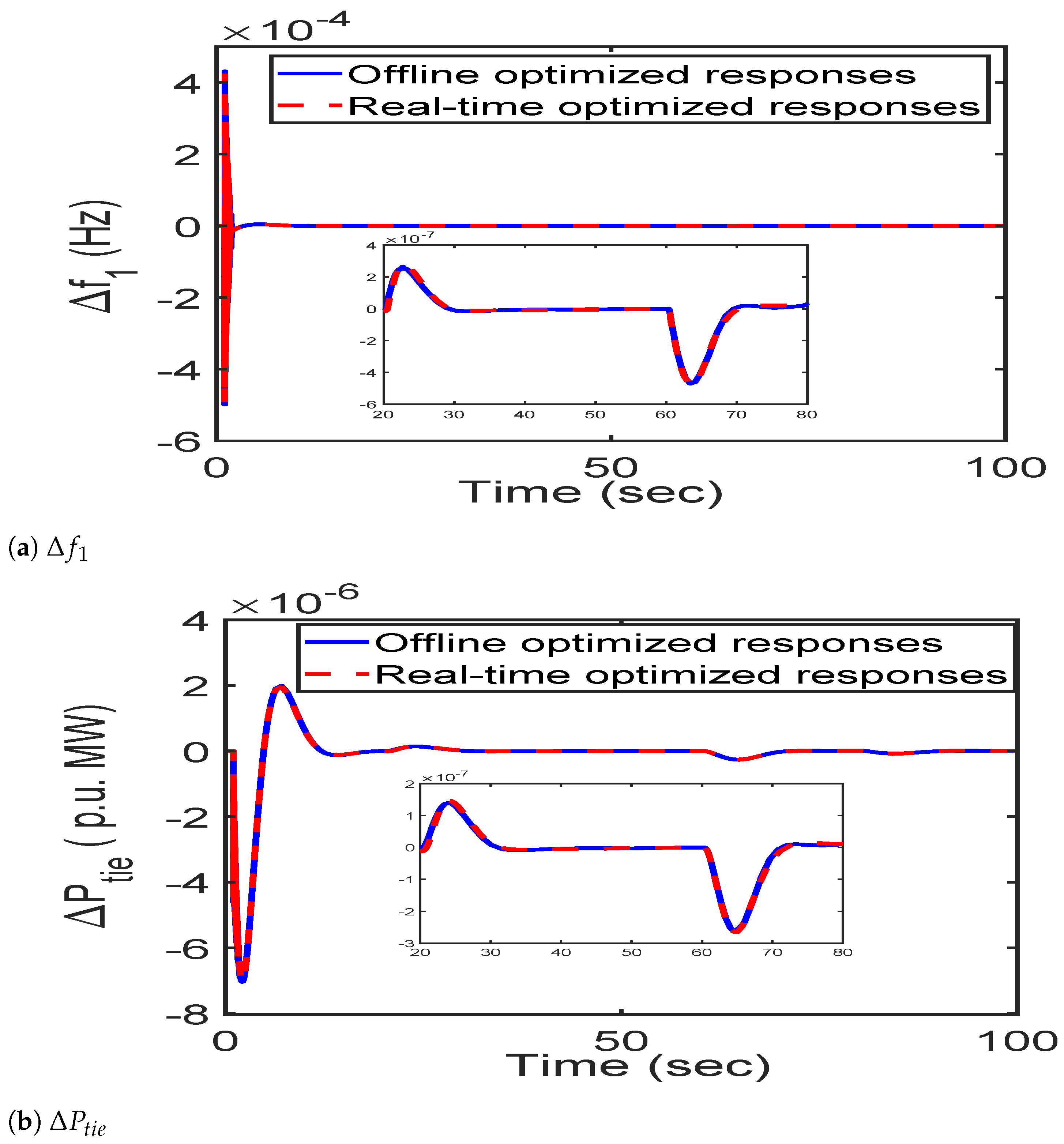
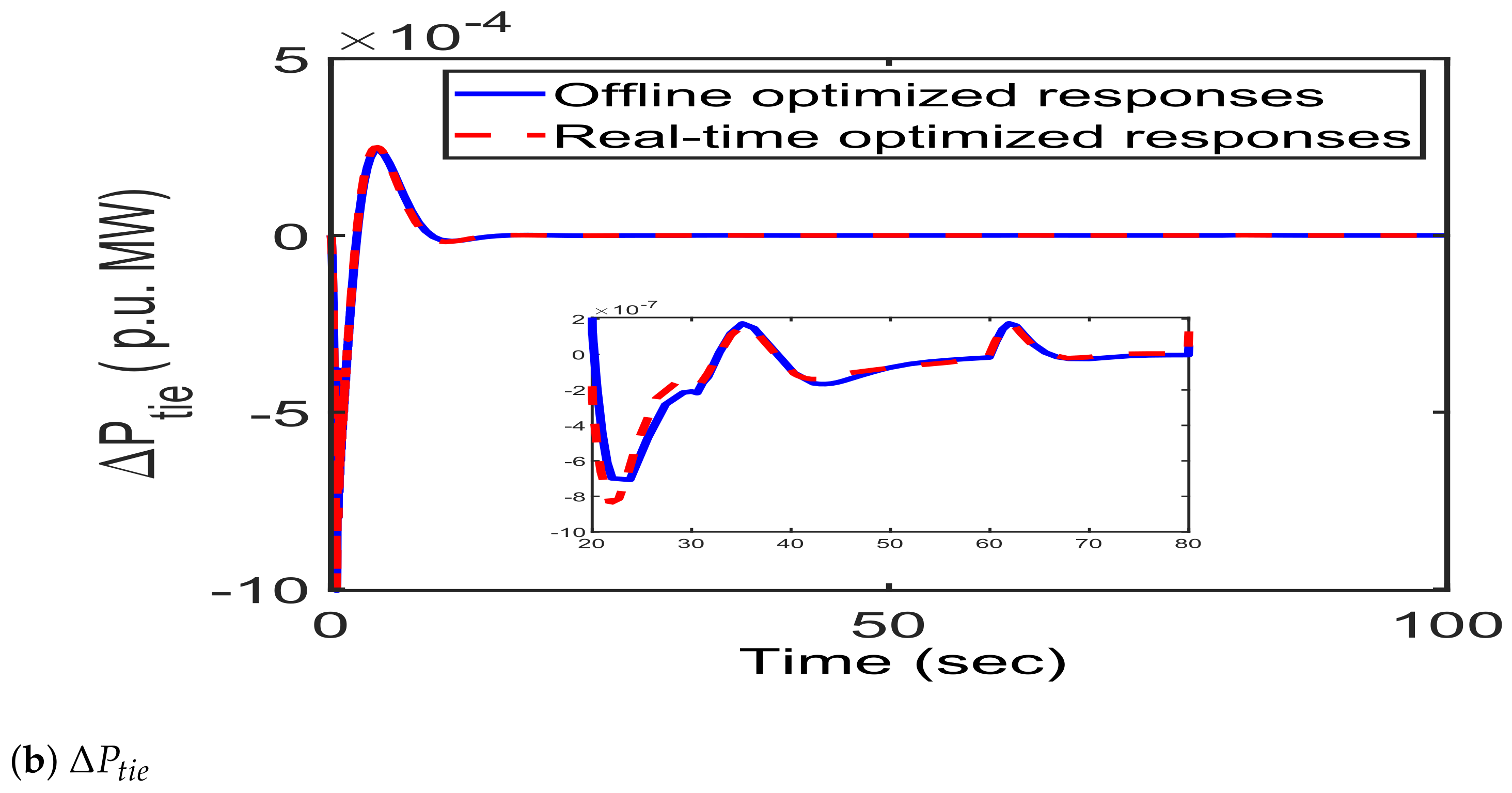
7.4. Power System Performance Comparison for C-19BOA Optimized Controller Gains of 2nd Order ADRC and PID
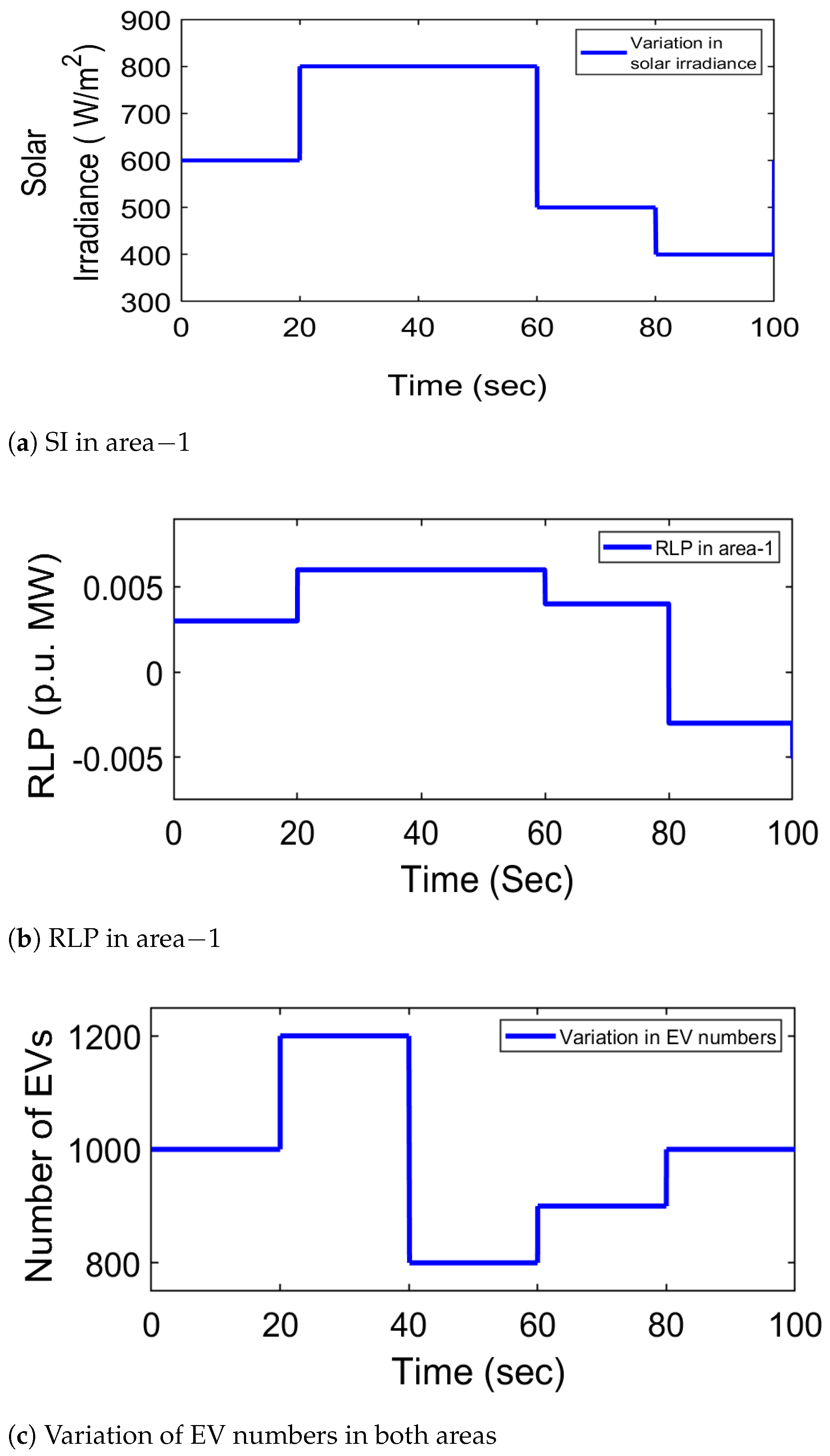
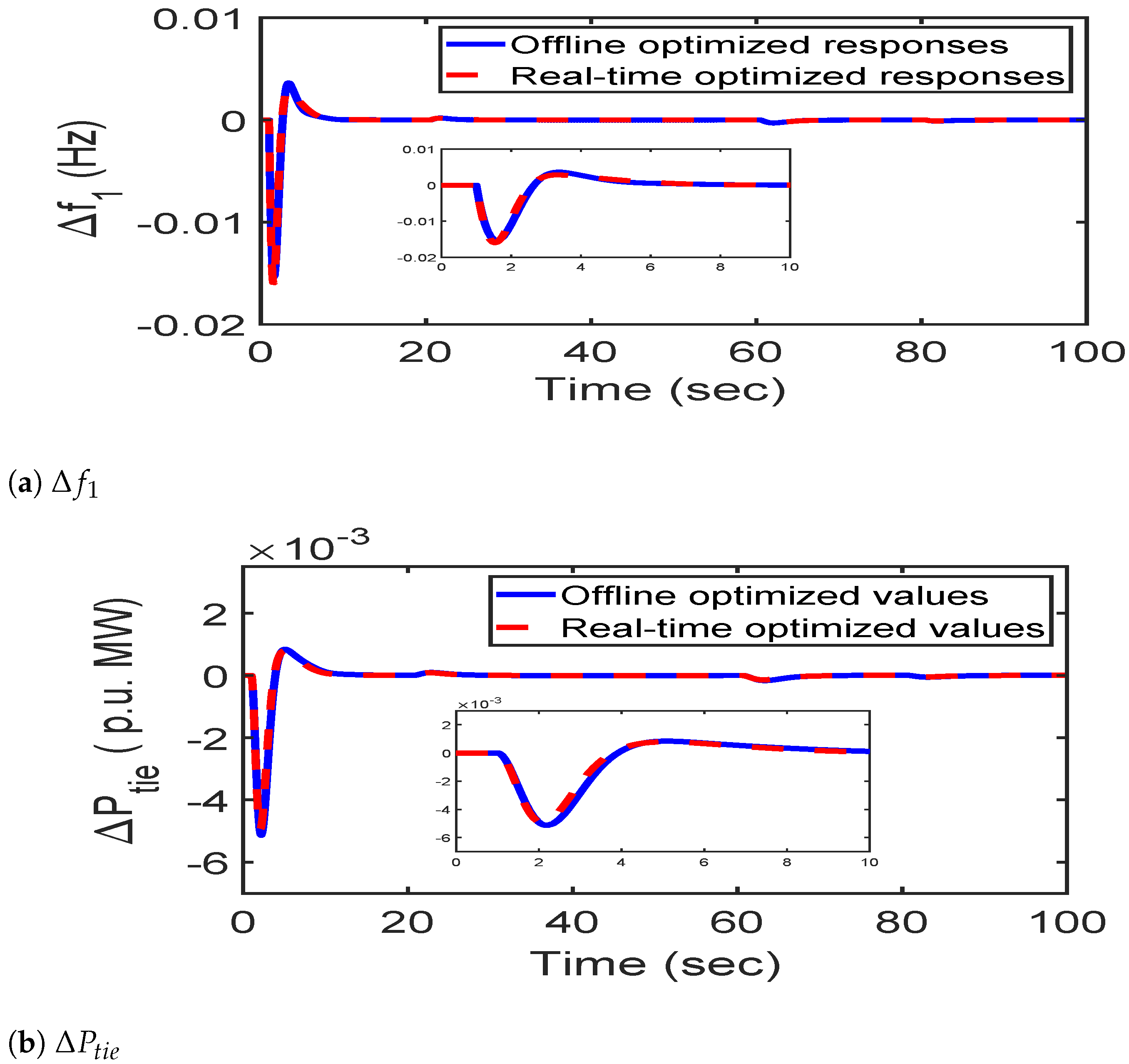
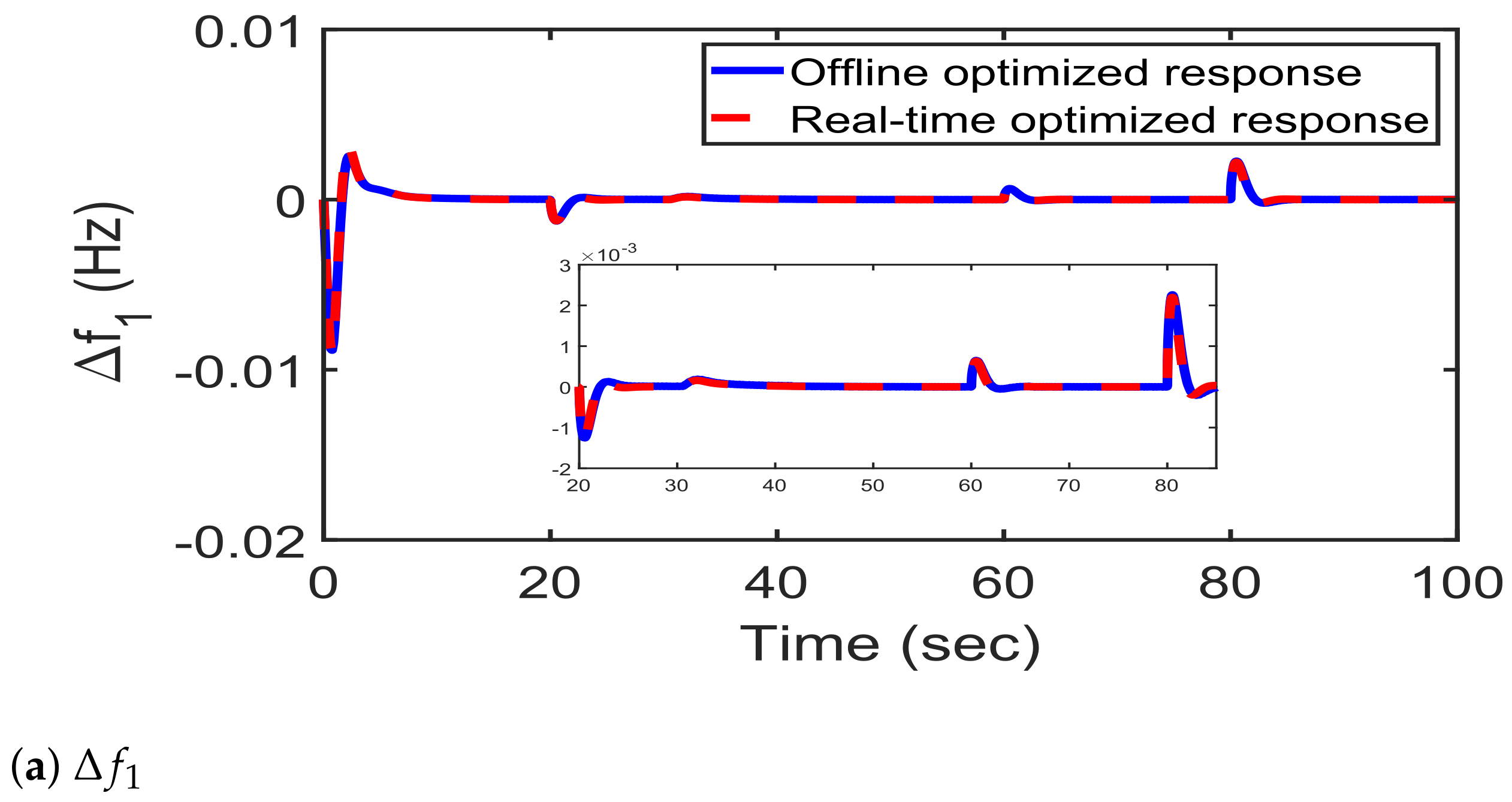
7.5. Sensitivity Test
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
Appendix A
References
- Coronavirus Cases. Worldometer. Available online: https://www.worldometers.info/coronavirus (accessed on 28 August 2022).
- Del Ser, J.; Osaba, E.; Molina, D.; Yang, X.S.; Salcedo-Sanz, S.; Camacho, D.; Das, S.; Suganthan, P.N.; Coello, C.A.C.; Herrera, F. Bio-inspired computation: Where we stand and what’s next. Swarm Evol. Comput. 2019, 48, 220–250. [Google Scholar] [CrossRef]
- Holland, J.H. Adaptation in Natural and Artificial Systems: An Introductory Analysis with Applications to Biology, Control, and Artificial Intelligence; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Simon, D. Biogeography-based optimization. IEEE Trans. Evol. Comput. 2008, 12, 702–713. [Google Scholar] [CrossRef] [Green Version]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95-International Conference on Neural Networks, Perth, WA, Australia, 27 November–1 December 1995; IEEE: Piscataway, NJ, USA, 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Karaboga, D.; Basturk, B. A powerful and efficient algorithm for numerical function optimization: Artificial bee colony (ABC) algorithm. J. Glob. Optim. 2007, 39, 459–471. [Google Scholar] [CrossRef]
- Yang, X.S.; Deb, S. Cuckoo search via Lévy flights. In Proceedings of the 2009 World Congress on Nature & Biologically Inspired Computing (NaBIC), Coimbatore, India, 9–11 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 210–214. [Google Scholar]
- Mo, H.; Xu, L. Magnetotactic bacteria optimization algorithm for multimodal optimization. In Proceedings of the 2013 IEEE Symposium on Swarm Intelligence (SIS), Singapore, 16–19 April 2013; pp. 240–247. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Hashim, F.A.; Hussain, K.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W. Archimedes optimization algorithm: A new metaheuristic algorithm for solving optimization problems. Appl. Intell. 2021, 51, 1531–1551. [Google Scholar] [CrossRef]
- Abualigah, L.; Diabat, A.; Mirjalili, S.; Abd Elaziz, M.; Gandomi, A.H. The Arithmetic Optimization Algorithm. Comput. Methods Appl. Mech. Eng. 2021, 376, 113609. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Hosseini, E. Laying chicken algorithm: A new meta-heuristic approach to solve continuous programming problems. J. Appl. Comput. Math. 2017, 6, 1–8. [Google Scholar] [CrossRef]
- Eghbal, H. Big bang algorithm: A new meta-heuristic approach for solving optimization problems. Asian J. Appl. Sci. 2017, 10, 134–144. [Google Scholar]
- Pattnaik, S.S.; Jadhav, D.G.; Devi, S.; Ratho, R.K. Swine influenza inspired optimization algorithm and its application to multimodal function optimization and noise removal. Artif. Intell. Res. 2012, 1, 18–30. [Google Scholar] [CrossRef]
- Liang, Y.C.; Cuevas Juarez, J.R. A novel metaheuristic for continuous optimization problems: Virus optimization algorithm. Eng. Optim. 2016, 48, 73–93. [Google Scholar] [CrossRef]
- Liang, Y.C.; Juarez, J.R.C. A self-adaptive virus optimization algorithm for continuous optimization problems. Soft Comput. 2020, 24, 13147–13166. [Google Scholar] [CrossRef]
- Martínez-Álvarez, F.; Asencio-Cortés, G.; Torres, J.; Gutiérrez-Avilés, D.; Melgar-García, L.; Pérez-Chacón, R.; Rubio-Escudero, C.; Riquelme, J.C.; Troncoso, A. Coronavirus Optimization Algorithm: A bioinspired metaheuristic based on the COVID-19 propagation model. Big Data 2020, 8, 308–322. [Google Scholar] [CrossRef]
- Hosseini, E.; Ghafoor, K.Z.; Sadiq, A.S.; Guizani, M.; Emrouznejad, A. Covid-19 optimizer algorithm, modeling and controlling of coronavirus distribution process. IEEE J. Biomed. Health Inf. 2020, 24, 2765–2775. [Google Scholar] [CrossRef]
- Al-Qaness, M.A.; Ewees, A.A.; Fan, H.; Abd El Aziz, M. Optimization method for forecasting confirmed cases of COVID-19 in China. J. Clin. Med. 2020, 9, 674. [Google Scholar] [CrossRef] [Green Version]
- Samui, P.; Mondal, J.; Khajanchi, S. A mathematical model for COVID-19 transmission dynamics with a case study of India. Chaos Solitons Fractals 2020, 140, 110173. [Google Scholar] [CrossRef]
- Srivastav, A.K.; Tiwari, P.K.; Srivastava, P.K.; Ghosh, M.; Kang, Y. A mathematical model for the impacts of face mask, hospitalization and quarantine on the dynamics of COVID-19 in India: Deterministic vs. stochastic. Math. Biosci. Eng. 2021, 18, 182–213. [Google Scholar] [CrossRef]
- Rafiq, D.; Suhail, S.A.; Bazaz, M.A. Evaluation and prediction of COVID-19 in India: A case study of worst hit states. Chaos Solitons Fractals 2020, 139, 110014. [Google Scholar] [CrossRef]
- Hakimuddin, N.; Khosla, A.; Garg, J.K. Centralized and decentralized AGC schemes in 2-area interconnected power system considering multi source power plants in each area. J. King Saud Univ. Eng. Sci. 2020, 32, 123–132. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Double stage controller optimization for load frequency stabilization in hybrid wind-ocean wave energy based maritime microgrid system. Applied Energy 2021, 282, 116171. [Google Scholar] [CrossRef]
- Jain, V.; Nsugbe, E.; Gupta, S. A GA optimized Fuzzy Logic Controller for Two Area Automatic Generation Control under dynamic behavior of Power System. In Proceedings of the 2021 Fourth International Conference on Computational Intelligence and Communication Technologies (CCICT), Sonepat, India, 3 July 2021; pp. 9–13. [Google Scholar] [CrossRef]
- Latif, A.; Paul, M.; Das, D.C.; Hussain, S.M.S.; Ustun, T.S. Price Based Demand Response for Optimal Frequency Stabilization in ORC Solar Thermal Based Isolated Hybrid Microgrid under Salp Swarm Technique. Electronics 2020, 9, 2209. [Google Scholar] [CrossRef]
- Chauhan, A.; Upadhyay, S.; Khan, M.T.; Hussain, S.M.S.; Ustun, T.S. Performance Investigation of a Solar Photovoltaic/Diesel Generator Based Hybrid System with Cycle Charging Strategy Using BBO Algorithm. Sustainability 2021, 13, 8048. [Google Scholar] [CrossRef]
- Rahman, A.; Saikia, L.C.; Sinha, N. Load frequency control of a hydro-thermal system under deregulated environment using biogeography-based optimised three-degree-of-freedom integral-derivative controller. IET Gener. Transm. Distrib. 2015, 9, 2284–2293. [Google Scholar] [CrossRef]
- Sivadanam, N.; Bhookya, N.; Maheswarapu, S. Dynamic performance enhancement of interconnected hybrid thermal power system in the presence of electric vehicles. Case Stud. Therm. Eng. 2021, 26, 101045. [Google Scholar] [CrossRef]
- Kumar, K.K.P.; Soren, N.; Latif, A.; Das, D.C.; Hussain, S.M.S.; Al-Durra, A.; Ustun, T.S. Day-Ahead DSM-Integrated Hybrid-Power-Management-Incorporated CEED of Solar Thermal/Wind/Wave/BESS System Using HFPSO. Sustainability 2022, 14, 1169. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.; Hannan, M.; Hussain, S.S.; Ustun, T.S. Optimal PI controller based PSO optimization for PV inverter using SPWM techniques. Energy Reports 2022, 8, 1003–1011. [Google Scholar] [CrossRef]
- Ulutas, A.; Altas, I.H.; Onen, A.; Ustun, T.S. Neuro-Fuzzy-Based Model Predictive Energy Management for Grid Connected Microgrids. Electronics 2020, 9, 900. [Google Scholar] [CrossRef]
- Abdolrasol, M.G.M.; Hannan, M.A.; Hussain, S.M.S.; Ustun, T.S.; Sarker, M.R.; Ker, P.J. Energy Management Scheduling for Microgrids in the Virtual Power Plant System Using Artificial Neural Networks. Energies 2021, 14, 6507. [Google Scholar] [CrossRef]
- Singh, N.K.; Koley, C.; Gope, S.; Dawn, S.; Ustun, T.S. An Economic Risk Analysis in Wind and Pumped Hydro Energy Storage Integrated Power System Using Meta-Heuristic Algorithm. Sustainability 2021, 13, 13542. [Google Scholar]
- Singh, S.; Chauhan, P.; Aftab, M.A.; Ali, I.; Hussain, S.M.S.; Ustun, T.S. Cost Optimization of a Stand-Alone Hybrid Energy System with Fuel Cell and PV. Energies 2020, 13, 1295. [Google Scholar] [CrossRef] [Green Version]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimization of Two-Stage IPD-(1+I) Controllers for Frequency Regulation of Sustainable Energy Based Hybrid Microgrid Network. Electronics 2021, 10, 919. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Design and Implementation of Maiden Dual-Level Controller for Ameliorating Frequency Control in a Hybrid Microgrid. Energies 2021, 14, 2418. [Google Scholar] [CrossRef]
- Dawn, S.; Gope, S.; Das, S.S.; Ustun, T.S. Social Welfare Maximization of Competitive Congested Power Market Considering Wind Farm and Pumped Hydroelectric Storage System. Electronics 2021, 10, 2611. [Google Scholar] [CrossRef]
- Geleta, D.K.; Manshahia, M.S.; Vasant, P.; Banik, A. Grey wolf optimizer for optimal sizing of hybrid wind and solar renewable energy system. Comput. Intell. 2022, 38, 1133–1162. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Lone, S.A. Load frequency control of multi-source electrical power system integrated with solar-thermal and electric vehicle. Int. Trans. Electr. Energy Syst. 2021, 31, e12918. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Lone, S.A. System dynamics and control of EV incorporated deregulated power system using MBO-optimized cascaded ID-PD controller. Int. Trans. Electr. Energy Syst. 2021, 31, e13100. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Lone, S.A. Optimal Control of Electrical Vehicle incorporated Hybrid Power System with 2nd Order Fractional-Active Disturbance Rejection Controller. Optim. Control. Appl. Methods 2021. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Lone, S.A. Power generation control of restructured hybrid power system with FACTS and energy storage devices using optimal cascaded fractional-order controller. Optim. Control. Appl. Methods 2022. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Lone, S.A. State-observer based IDD controller for concurrent frequency-voltage control of a hybrid power system with electric vehicle uncertainties. Int. Trans. Electr. Energy Syst. 2021, 31, e13083. [Google Scholar] [CrossRef]
- Safiullah, S.; Rahman, A.; Lone, S.A.; Hussain, S.S.; Ustun, T.S. Robust frequency–voltage stabilization scheme for multi-area power systems incorporated with EVs and renewable generations using AI based modified disturbance rejection controller. Energy Rep. 2022, 8, 12186–12202. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Sinha, N.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Performance Assessment of an Islanded Hybrid Power System with Different Storage Combinations Using an FPA-Tuned Two-Degree-of-Freedom (2DOF) Controller. Energies 2022, 13, 5610. [Google Scholar] [CrossRef]
- Farooq, Z.; Rahman, A.; Hussain, S.M.S.; Ustun, T.S. Power Generation Control of Renewable Energy Based Hybrid Deregulated Power System. Energies 2022, 15, 517. [Google Scholar] [CrossRef]
- Latif, A.; Hussain, S.M.S.; Das, D.C.; Ustun, T.S. Optimum Synthesis of a BOA Optimized Novel Dual-Stage PI (1 + ID) Controller for Frequency Response of a Microgrid. Energies 2020, 13, 3446. [Google Scholar] [CrossRef]
- Das, A.; Dawn, S.; Gope, S.; Ustun, T.S. A Strategy for System Risk Mitigation Using FACTS Devices in a Wind Incorporated Competitive Power System. Sustainability 2022, 14, 8069. [Google Scholar] [CrossRef]
- Das, S.S.; Das, A.; Dawn, S.; Gope, S.; Ustun, T.S. A Joint Scheduling Strategy for Wind and Solar Photovoltaic Systems to Grasp Imbalance Cost in Competitive Market. Sustainability 2022, 14, 5005. [Google Scholar] [CrossRef]
- Multiarea Power System Performance Measurement using Optimized PID Controller. Microprocess. Microsyst. 2021, 104238. [CrossRef]
- Nahas, N.; Abouheaf, M.; Sharaf, A.; Gueaieb, W. A Self-Adjusting Adaptive AVR-LFC Scheme for Synchronous Generators. IEEE Trans. Power Syst. 2019, 34, 5073–5075. [Google Scholar] [CrossRef]
- Guha, D.; Roy, P.K.; Banerjee, S. Equilibrium optimizer-tuned cascade fractional-order 3DOF-PID controller in load frequency control of power system having renewable energy resource integrated. Int. Trans. Electr. Energy Syst. 2021, 31, e12702. [Google Scholar] [CrossRef]
- Sobhanam, A.P.; Mary, P.M.; Mariasiluvairaj, W.I.; Wilson, R.D. Automatic Generation Control Using an Improved Artificial Electric Field in Multi-Area Power System. IETE J. Res. 2021, 1–13. [Google Scholar] [CrossRef]
- Sahoo, D.K.; Sahu, R.K.; Panda, S. Fractional Order Fuzzy PID Controller for Automatic Generation Control of Power Systems. ECTI Trans. Electr. Eng. Electron. Commun. 2021, 19, 71. [Google Scholar] [CrossRef]
- Han, J.Q. Auto Disturbance Rejection Controller and It’s Applications. Control. Decis. 1998, 13, 19–23. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Herbst, G. A Simulative Study on Active Disturbance Rejection Control (ADRC) as a Control Tool for Practitioners. Electronics 2013, 2, 246–279. [Google Scholar] [CrossRef]
- Zhou, R.; Tan, W. Analysis and tuning of general linear active disturbance rejection controllers. IEEE Trans. Ind. Electron. 2018, 66, 5497–5507. [Google Scholar] [CrossRef]
- Liu, F.; Li, Y.; Cao, Y.; She, J.; Wu, M. A two-layer active disturbance rejection controller design for load frequency control of interconnected power system. IEEE Trans. Power Syst. 2015, 31, 3320–3321. [Google Scholar] [CrossRef]
- Hernandez-Vargas, E.A.; Velasco-Hernandez, J.X. In-host mathematical modelling of covid-19 in humans. Annu. Rev. Control. 2020, 50, 448–456. [Google Scholar] [CrossRef]
- COVID-19: Keep On Keeping Your Distance. Available online: https://www.healthychildren.org/English/health-issues/conditions/COVID-19/Pages/Social-Distancing-Why-Keeping-Your-Distance-Helps-Keep-Others-Safe.aspx (accessed on 28 August 2022).
- Hernandez-Vargas, E.A.; Wilk, E.; Canini, L.; Toapanta, F.R.; Binder, S.C.; Uvarovskii, A.; Ross, T.M.; Guzmán, C.A.; Perelson, A.S.; Meyer-Hermann, M. Effects of aging on influenza virus infection dynamics. J. Virol. 2014, 88, 4123–4131. [Google Scholar] [CrossRef] [Green Version]
- Hancioglu, B.; Swigon, D.; Clermont, G. A dynamical model of human immune response to influenza A virus infection. J. Theor. Biol. 2007, 246, 70–86. [Google Scholar] [CrossRef]
- Debbarma, S.; Dutta, A. Utilizing Electric Vehicles for LFC in Restructured Power Systems Using Fractional Order Controller. IEEE Trans. Smart Grid 2017, 8, 2554–2564. [Google Scholar] [CrossRef]
- Hussain, I.; Das, D.C.; Latif, A.; Sinha, N.; Hussain, S.S.; Ustun, T.S. Active Power Control of Autonomous Hybrid Power System Using Two Degree of Freedom PID Controller. Energy Rep. 2022, 8, 973–981. [Google Scholar] [CrossRef]
- Dey, P.P.; Das, D.C.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. ctive Power Management of Virtual Power Plant under Penetration of Central Receiver Solar Thermal-Wind Using Butterfly Optimization Technique. Sustainability 2020, 12, 6979. [Google Scholar] [CrossRef]
- Barik, A.K.; Das, D.C.; Latif, A.; Hussain, S.M.S.; Ustun, T.S. Optimal Voltage–Frequency Regu- 645 lation in Distributed Sustainable Energy-Based Hybrid Microgrids with Integrated Resource Planning.Optimal load frequency control of island microgrids via a PID controller in the presence of wind turbine and PV. Energies 2021, 14, 2735. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Element | Description | Value |
|---|---|---|
| Time taken by PZ to infect new individual | 3 (User-defined) | |
| Basic virus reproduction rate (no. of newly infected individuals produced by an infected individual) | 2.4 (Mean value for different states or provinces reported in [63]) | |
| W | Virus level proliferation | 0.35 (Reported in [63]) |
| K | Maximum carrying capacity of virus replication | 0.31 (Reported in [63]) |
| c | Virus clearance rate | 2.4 (Reported in [63]) |
| Function | Formulation |
|---|---|
| Ackley | |
| Quartic | |
| Rastrigin | |
| Rosenbrock | |
| Schwefel 2.21 | |
| Schwefel 2.22 | |
| Sphere | |
| Schubert |
| Function | Multimodal (MM) or Unimodal (UM) | Separable (S) or Non-Separable (NS) | Regular (R) or Irregular (IR) | Dimension Range |
|---|---|---|---|---|
| Ackley | MM | NS | R | ±30 |
| Quartic | UM | S | R | ±1.28 |
| Rastrigin | MM | S | R | ±5.12 |
| Rosenbrock | UM | NS | R | ±2.048 |
| Schwefel 2.21 | MM | NS | IR | ±100 |
| Schwefel 2.22 | MM | NS | IR | ±10 |
| Sphere | UM | S | R | ±5.12 |
| Schubert | MM | S | R | ±10 |
| Function | Study | GA [3] | BBO [4] | PSO [5] | AOA [10] | MBO [8] | C-19BOA |
|---|---|---|---|---|---|---|---|
| Ackley | Mean | 7.5498 | 3.4287 | 0 | 2.5609 | 0.0147 | 0.2516 |
| Std | 5.2027 | 1.5843 | 0 | 1.4702 | 0.0727 | 0.2663 | |
| Quartic | Mean | −0.3417 | −0.1952 | −0.3442 | −0.3441 | −0.0129 | −0.3442 |
| Std | 0.0054 | 0.2148 | 0 | 0.0049 | 0.0636 | 0 | |
| Rastrigin | Mean | 5.1106 | 22.1216 | 1.1569 | 2.1736 | 0.1328 | 5.1795 |
| Std | 3.3795 | 14.1858 | 1.0676 | 1.5278 | 0.6571 | 2.0060 | |
| Rosenbrock | Mean | 0.0275 | 0.1275 | 0 | 0.0014 | 0.0024 | 0 |
| Std | 0.1017 | 0.1506 | 0 | 0.0075 | 0.0121 | 0 | |
| Schwefel 2.21 | Mean | 0.4267 | 0.0539 | 0 | 0.0107 | 0.0017 | 0 |
| Std | 0.1044 | 0.0550 | 0 | 0.0109 | 0.0087 | 0 | |
| Schwefel 2.22 | Mean | 0.3311 | 0.2936 | 0.2926 | 0.2927 | 0.0117 | 0.2926 |
| Std | 0.0294 | 0.0011 | 0 | 0.00040 | 0.0580 | 0 | |
| Sphere | Mean | 0.7841 | 3.6441 | 0 | 0.0893 | 0.0020 | 0 |
| Std | 0.7393 | 4.4599 | 0 | 0.1350 | 0.0099 | 0 | |
| Schubert | Mean | −242.1090 | −157.0483 | −271.2091 | −222.8429 | −8.2987 | −299.63 |
| Std | 16.2289 | 52.4311 | 0 | 24.7525 | 41.0681 | 0 |
| Technique | Settling-Time for (s) | Settling-Time for (s) | Settling-Time for (s) |
|---|---|---|---|
| GA [3] PSO [5] MBO [8] BBO [4] AOA [10] Proposed C-19BOA | 7.32 14.25 8.12 8.67 15.69 6.62 | 10.21 18.88 11.65 10.39 12.58 9.75 | 10.02 18.06 11.73 10.43 10.05 9.69 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Safiullah, S.; Rahman, A.; Lone, S.A.; Hussain, S.M.S.; Ustun, T.S. Novel COVID-19 Based Optimization Algorithm (C-19BOA) for Performance Improvement of Power Systems. Sustainability 2022, 14, 14287. https://doi.org/10.3390/su142114287
Safiullah S, Rahman A, Lone SA, Hussain SMS, Ustun TS. Novel COVID-19 Based Optimization Algorithm (C-19BOA) for Performance Improvement of Power Systems. Sustainability. 2022; 14(21):14287. https://doi.org/10.3390/su142114287
Chicago/Turabian StyleSafiullah, Sheikh, Asadur Rahman, Shameem Ahmad Lone, S. M. Suhail Hussain, and Taha Selim Ustun. 2022. "Novel COVID-19 Based Optimization Algorithm (C-19BOA) for Performance Improvement of Power Systems" Sustainability 14, no. 21: 14287. https://doi.org/10.3390/su142114287