
Longitudinal Driving Behavior before, during, and after a Left-Turn Movement at Signalized Intersections: A Naturalistic Driving Study in China

Abstract
:1. Introduction

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Study | Performance Parameters | Experiment Method | Main Result |
|---|---|---|---|
| Ma, Z. and Y. Zhang [8]. | 1. Distance from takeover to stop line, 2. time to stop line when takeover, 3. distance from beginning to decelerate to stop line, 4. average deceleration. | Questionnaire and driving simulator in the USA | The driver’s trust, acceptance, and takeover frequency were significantly influenced by the interaction effects between AV’s driving style and driver’s driving style. |
| Li, X., et al. [33]. | 1. Approaching speed, 2. reaction distance, 3. maximum deceleration, 4. stop location, 5. waiting time, 6. maximum acceleration, 7. crossing completion time. | Driving simulator in Australia | 1. The distracted drivers braked later and decelerated with a larger maximum deceleration when approaching the intersection compared with the non-distracted drivers. 2. The distracted drivers stopped further away from the intersection and waited a longer time before crossing compared with the non-distracted drivers. |
| Almallah, M., et al. [20]. | Reaction time, acceleration, and jerk start-up behavior at the onset of green. | Driving simulator in Qatar | 1. Age and culture of drivers had a significant effect on reaction time, acceleration, and jerk. 2. The mean reaction time, acceleration, and jerk were found to be 2.91 s (±0.55 SD), 2.8 m/s2 (±1.2 SD), and 0.94 m/s3 (±0.99 SD), respectively. |
| Rittger, L. et al. [21]. | 1. Speed, 2. acceleration, 3. pedal usage. | Driving simulator in Germany | Maximum accelerations and decelerations were stronger when the traffic lights changed compared to remaining solid, which was especially true when there was no fog on the track. |
| Zöller, I., et al. [31]. | Moment in time of braking initiation. | Driving simulator and field test in Germany | Braking is initiated significantly earlier in the field than in the driving simulator in preparation for a turning maneuver. |
| Hong, S., et al. [34]. | 1. Velocity at braking initiation, 2. time from braking initiation to stop, 3. distance from the stop position to a stop line, 4. rate of deceleration changed from braking operation. | Field test in Japan | The rates of deceleration change (jerk) with the braking operation were unstable and the driving behaviors were affected by the environment or conditions of the intersection. |
| Carter, N., et al. [35]. | 1. Average acceleration, 2. peak acceleration. | Traffic trajectories in the USA | The average of the peak lateral accelerations was 0.17 g, the average of the peak tangential accelerations was 0.12 g, and the average of the average accelerations was 0.05 g. |
| Happer, A., Peck, M., and Hughes, M., [19]. | 1. Velocity, 2. acceleration. | Traffic trajectories in the USA | 1. Average turning speed of vehicles that did not stop before turning was in the range of 6.0 to 6.6 m/s. 2. Average turning speed of vehicles that stopped before turning ranged from 4.6 to 6.3 m/s. 3. Average acceleration of vehicles that proceeded through the intersection after stopping was over the range of 0.85 to 1.20 m/s2. |
| Abdeljaber, O., et al. [16]. | Path, entry speed, minimum speed, and the lateral distance between the exit point and the curb (i.e., targeted exit lane). | Traffic trajectories in Qatar | The characteristics of left-turn paths are significantly related to the vehicle’s entry speed, minimum speed throughout its turning maneuver, and the lateral distance between the exit point and the curb. |
| Petraki, V., et al. [36]. | 1. Harsh accelerations, 2. harsh decelerations, 3. average speed of harsh event, 4. distance of the harsh event. | Smartphones’ data in Greece | 1. The number of harsh events and harsh accelerations increases as average traffic flow per lane increases. 2. As the average speed increases, more harsh deceleration events occur. 3. Traffic characteristics (traffic flow and speed) have the most statistically significant impact on the frequency of harsh events. |
| Tawfeek, M. H. and K. El-Basyouny [29]. | 1. Minimum following distance, 2. acceleration, 3. relative speed, 4. headway, 5. TTC, 6. jerk. | NDS in the USA | 1. Several behavioral measures of following distance, relative speed, headway, acceleration, time-to-collision, and jerk were extracted and used to train the algorithms in the context identification layer. 2. The drivers tend to be relatively aggressive at intersections when compared to segments. 3. When ignoring the driver’s relative location to intersections, the driver’s behavior was more likely to be misclassified. |
| Shino, M. et al. [30] | Moment in time of braking initiation. | NDS in Japan | 1. A driver who approached an intersection decided the deceleration timing according to the time to the intersection. 2. The index TTIS based on the formulation of deceleration behavior when a driver approaches an intersection was proposed. 3. The index TTIS can be used to detect the deviated driver states. |
2. Methods
2.1. Database
2.2. Definition of the Three Driving Phases
- (1)
- Approaching phase: When drivers decelerate and approach the intersections to prepare for a left turn. The start of the approaching phase is defined as the onset of drivers pressing the brake pedal, while the end of the approaching phase is defined as the position of vehicles reaching the minimum speed between 100 and −40 m. Especially, when the vehicle speed was less than the typical walking speed of 4.32 km/h [3], the vehicle was considered as stopped.
- (2)
- Stop–go phase: Vehicles go through a series of stop–go cycles due to traffic jams and the traffic light. For cases with two or more stops (shown in Figure 4), this phase is defined as the period from the vehicle’s first stop point (i.e., the approaching ending point) to the last stop point. If the vehicle stopped once or not at all between 100 and −40 m, the phase was referred to as the point coinciding with the approaching ending point.
- (3)
- Traversal phase: Vehicles accelerate and traverse the intersection. The beginning of the traversal phase (“traversal starting point”) is the end of the stop–go phase, and the traversal phase ends at the position with full speed.
2.3. Data Analysis
- (1)
- DTIa: The distance between the approaching starting point and the stop line, which represents the spatial acceptance of drivers starting preparation for a left turn.
- (2)
- TTIa: The time between approaching the starting point and the stop line, which represents the temporal acceptance of drivers starting preparation for a left turn (i.e., time from braking initiation to the stop line).
- (3)
- Decmax: The maximum deceleration in the period of the approaching phase (Decmax), which represents the comfort boundary drivers maintained at the approaching phase. In a sense, Decmax may refer to a state of sudden braking.
- (1)
- DTIs: The distance between the approaching ending point and the stop line, which represents the spatial acceptance of drivers stopping in preparation for a left turn.
- (2)
- Numstop: The number of stops before traversing an intersection, which represents the traffic capacity at an intersection.
- (3)
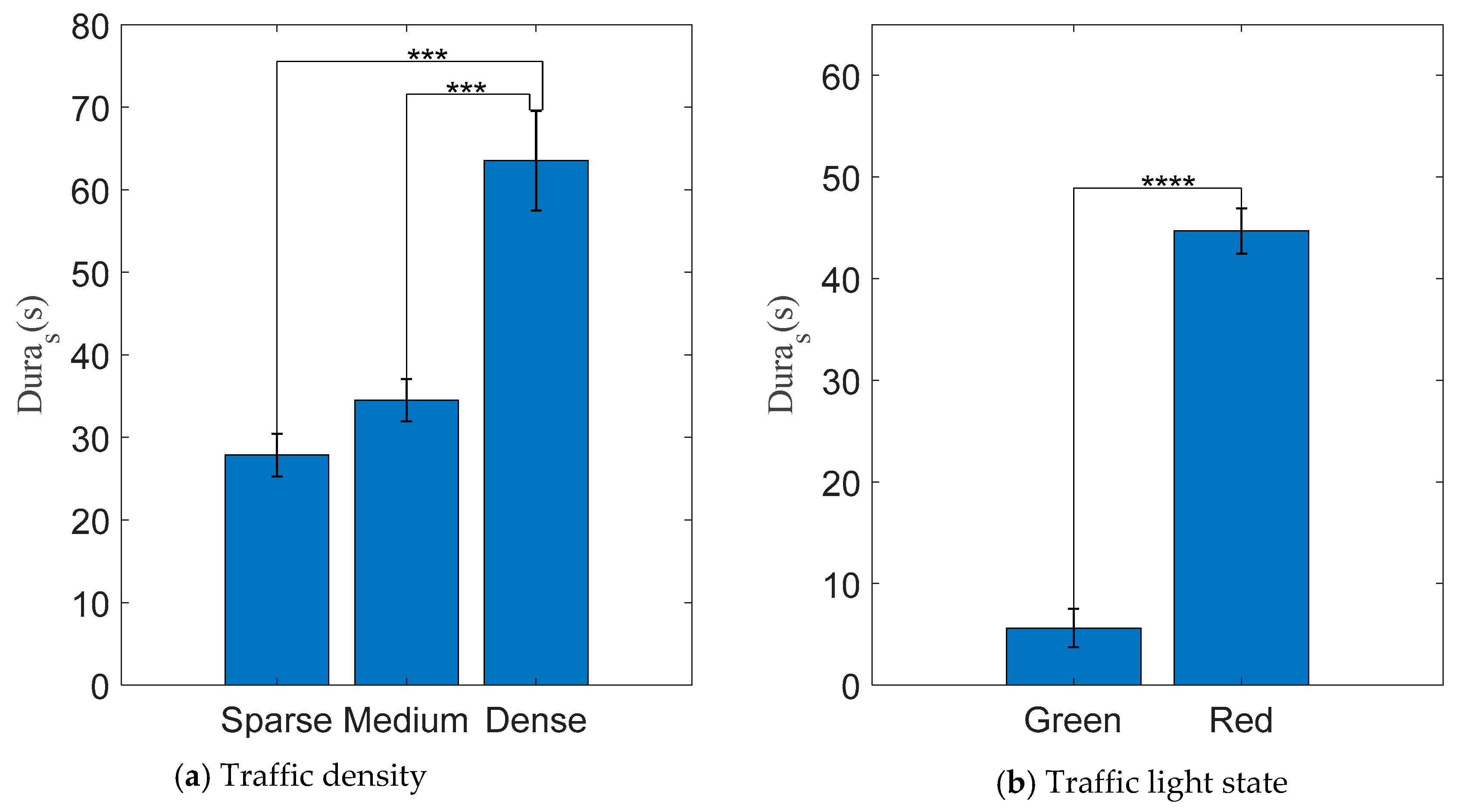
- Duras: The time duration between the approaching ending point and the traversal starting point, which represents the traffic capacity at an intersection.
- (1)
- DTIt: The distance between the traversal starting point and the stop line, which represents the spatial acceptance of drivers starting traversal and left turn.
- (2)
- ACCstart: The starting acceleration at the traversal phase, which was taken at 1 s after accelerating and represents the urgency for acceleration after the stop line.
- (3)
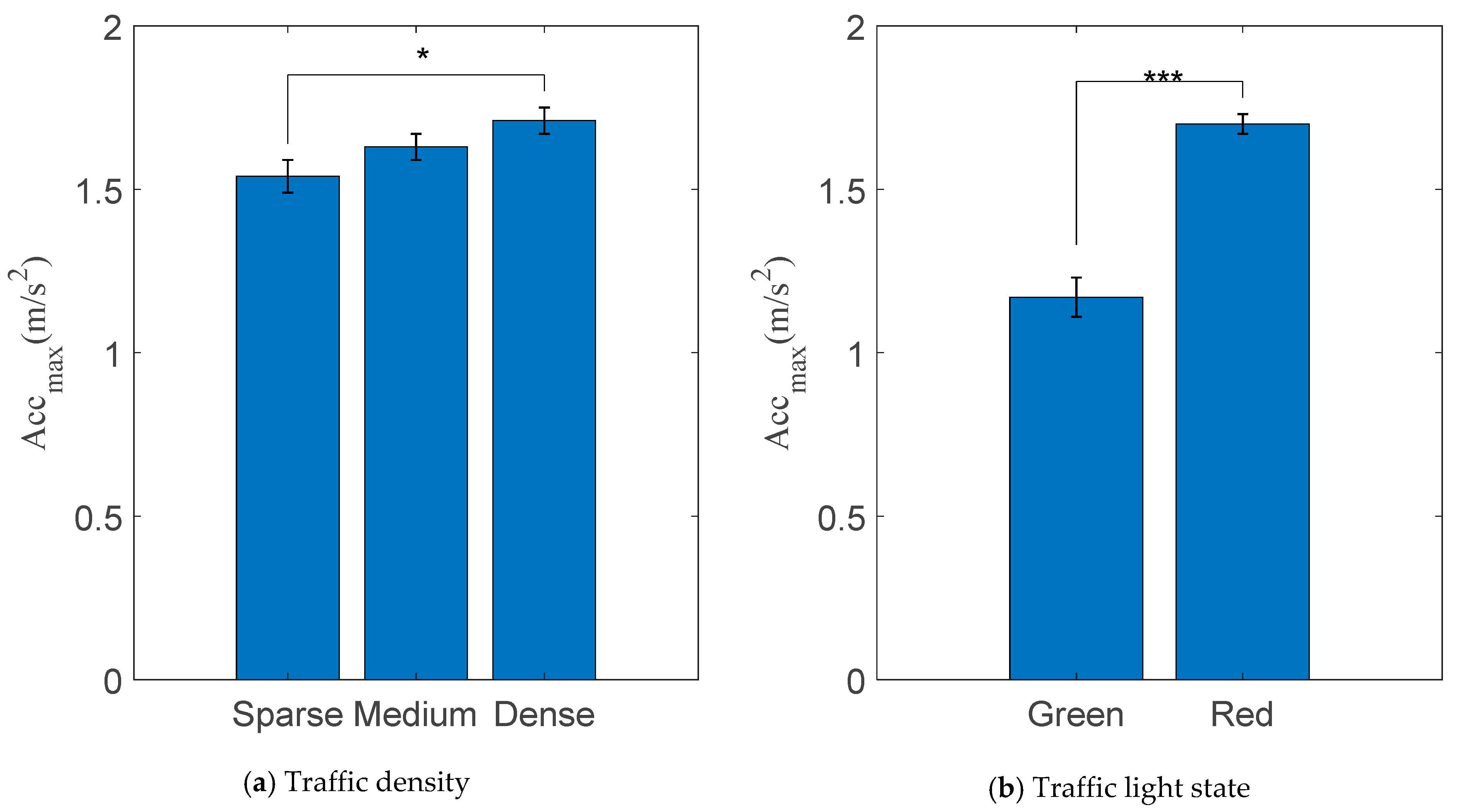
- ACCmax: The maximum acceleration at the traversal phase, which represents the comfort acceleration boundary drivers maintained at the traversal phase.
3. Results
3.1. Overview Analysis of Driving Behavior
3.1.1. Spatial Distribution of the Three Phases
3.1.2. Speed
3.1.3. Longitudinal Acceleration
3.2. Approaching Phase
3.2.1. Time to the Intersection at the Initiation of Braking
3.2.2. Maximum Deceleration
3.3. Stop–Go Phase
3.3.1. Number of Stops
3.3.2. Duration of Stop–Go Phase
3.4. Traversal Phase
3.4.1. Starting Acceleration
3.4.2. Maximum Acceleration
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- SAE; Society of Automotive Engineers; On-Road Automated Vehicle Standards Committee. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (R), J3016-202104. 2021. Available online: https://www.sae.org/standards/content/J3016_202104 (accessed on 30 April 2021).
- Kusano, K.D.; Gabler, H.C. Target population for intersection advanced driver assistance systems in the US. SAE Int. J. Transp. Saf. 2015, 3, 1–16. [Google Scholar] [CrossRef]
- Scanlon, J.M. Evaluating the Potential of an Intersection Driver Assistance System to Prevent US Intersection Crashes. Ph.D. Dissertation, Virginia Blacksburg, Blacksburg, VA, USA, 2017. [Google Scholar]
- Orlovska, J.; Novakazi, F.; Lars-Ola, B.; Karlsson, M.; Wickman, C.; Söderberg, R. Effects of the driving context on the usage of Automated Driver Assistance Systems (ADAS)-Naturalistic Driving Study for ADAS evaluation. Transp. Res. Interdiscip. Perspect. 2020, 4, 100093. [Google Scholar] [CrossRef]
- NHTSA. Traffic Safety Facts 2015 Data (DOT HS 812 353, Updated March 2017); National Highway Traffic Safety Administration: Washington, DC, USA, 2017. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/Publication/812384 (accessed on 30 April 2021).
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Fleming, J.M.; Allison, C.K.; Yan, X.; Lot, R.; Stanton, N.A. Adaptive driver modelling in ADAS to improve user acceptance: A study using naturalistic data. Saf. Sci. 2019, 119, 76–83. [Google Scholar] [CrossRef]
- Ma, Z.; Zhang, Y. Drivers trust, acceptance, and takeover behaviors in fully automated vehicles: Effects of automated driving styles and driver’s driving styles. Accid. Anal. Prev. 2021, 159, 106238. [Google Scholar] [CrossRef]
- Dixit, V.V.; Chand, S.; Nair, D.J. Autonomous vehicles: Disengagements, accidents and reaction times. PLoS ONE 2016, 11, e0168054. [Google Scholar] [CrossRef]
- Favarò, F.; Eurich, S.; Nader, N. Autonomous vehicles’ disengagements: Trends, triggers, and regulatory limitations. Accid. Anal. Prev. 2018, 110, 136–148. [Google Scholar] [CrossRef]
- Xu, C.; Ding, Z.; Wang, C.; Li, Z. Statistical analysis of the patterns and characteristics of connected and autonomous vehicle involved crashes. J. Saf. Res. 2019, 71, 41–47. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, X.; Wu, X.; Glaser, Y.; He, L. Crash comparison of autonomous and conventional vehicles using pre-crash scenario typology. Accid. Anal. Prev. 2021, 159, 106281. [Google Scholar] [CrossRef]
- Werneke, J.; Vollrath, M. How do environmental characteristics at intersections change in their relevance for drivers before entering an intersection: Analysis of drivers’ gaze and driving behavior in a driving simulator study. Cogn. Technol. Work. 2014, 16, 157–169. [Google Scholar] [CrossRef]
- California Department of Motor Vehicles (California DMV). 2021b. Autonomous Vehicle Collision Reports. Available online: https://www.dmv.ca.gov/portal/vehicle-industry-services/autonomous-vehicles/autonomous-vehicle-collision-reports/ (accessed on 27 January 2021).
- NHTSA. Crash Factors in Intersection-Related Crashes: An On-Scene Perspective. Washington, DC: National Highway Traffic Safety Administration. 2010. Available online: https://crashstats.nhtsa.dot.gov/Api/Public/ViewPublication/811366 (accessed on 1 September 2010).
- Abdeljaber, O.; Younis, A.; Alhajyaseen, W. Analysis of the Trajectories of Left-turning Vehicles at Signalized Intersections. Transp. Res. Procedia 2020, 48, 1288–1295. [Google Scholar] [CrossRef]
- Liu, M.; Chen, Y.; Lu, G.; Wang, Y. Modeling crossing behavior of drivers at unsignalized intersections with consideration of risk perception. Transp. Res. Part F: Traffic Psychol. Behav. 2017, 45, 14–26. [Google Scholar] [CrossRef]
- Zyner, A.; Worrall, S.; Nebot, E. Naturalistic Driver Intention and Path Prediction Using Recurrent Neural Networks. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1584–1594. [Google Scholar] [CrossRef]
- Happer, A.J.; Peck, M.D.; Hughes, M.C. Analysis of left-turning vehicles at a 4-way medium-sized signalized intersection. SAE Int. J. Passeng. Cars-Mech. Syst. 2009, 2, 359–370. [Google Scholar] [CrossRef]
- Almallah, M.; Alfahel, R.; Hussain, Q.; Alhajyaseen, W.K.M.; Dias, C. Empirical evaluation of drivers’ start-up behavior at signalized intersection using driving simulator. Procedia Comput. Sci. 2020, 170, 227–234. [Google Scholar] [CrossRef]
- Rittger, L.; Schmidt, G.; Maag, C.; Kiesel, A. Driving behaviour at traffic light intersections. Cogn. Technol. Work. 2015, 17, 593–605. [Google Scholar] [CrossRef]
- Horberry, T.; Anderson, J.; Regan, M.A.; Triggs, T.J.; Brown, J. Driver distraction: The effects of concurrent in-vehicle tasks, road environment complexity and age on driving performance. Accid. Anal. Prev. 2006, 38, 185–191. [Google Scholar] [CrossRef]
- Hamdar, S.H.; Qin, L.; Talebpour, A. Weather and road geometry impact on longitudinal driving behavior: Exploratory analysis using an empirically supported acceleration modeling framework. Transp. Res. Part C Emerg. Technol. 2016, 67, 193–213. [Google Scholar] [CrossRef]
- Hamzeie, R.; Savolainen, P.T.; Gates, T.J. Driver speed selection and crash risk: Insights from the naturalistic driving study. J. Saf. Res. 2017, 63, 187–194. [Google Scholar] [CrossRef]
- Jiang, X.; Zhang, G.; Bai, W.; Fan, W. Safety evaluation of signalized intersections with left-turn waiting area in China. Accid. Anal. Prev. 2016, 95, 461–469. [Google Scholar] [CrossRef] [Green Version]
- Morency, P.; Gauvin, L.; Plante, C.; Fournier, M.; Morency, C. Neighborhood social inequalities in road traffic injuries: The influence of traffic volume and road design. Am. J. Public Health 2012, 102, 1112. [Google Scholar] [CrossRef] [PubMed]
- Plavsic, M. Analysis and Modeling of Driver Behavior for Assistance Systems at Road Intersections. Ph.D. Dissertation, Technische Universität München, München, Germany, 2010. [Google Scholar]
- Yuan, T.; Zhao, X.; Liu, R.; Zhu, X.; Wang, S.; Yu, Q. Speed behaviour of right-turn drivers at signalized intersections in China. IET Intell. Transp. Syst. 2022, 1–13. [Google Scholar] [CrossRef]
- Tawfeek, M.H.; El-Basyouny, K. A context identification layer to the reasoning subsystem of context-aware driver assistance systems based on proximity to intersections. Transp. Res. Part C Emerg. Technol. 2020, 117, 102703. [Google Scholar] [CrossRef]
- Shino, M.; Minami, K.; Kamata, M.; Hiramatsu, M.; Sunda, T. Deceleration Timing Relating a Driver’s State Based on Naturalistic Driving Behavior Database during Approach to Intersection. Int. J. Automot. Eng. 2019, 10, 106–112. [Google Scholar] [CrossRef]
- Zöller, I.; Abendroth, B.; Bruder, R. Driver behaviour validity in driving simulators—Analysis of the moment of initiation of braking at urban intersections. Transp. Res. Part F Traffic Psychol. Behav. 2019, 61, 120–130. [Google Scholar] [CrossRef]
- Li, S.; Li, P.; Yao, Y.; Han, X.; Xu, Y.; Chen, L. Analysis of drivers’ deceleration behavior based on naturalistic driving data. Traffic Inj. Prev. 2020, 21, 42–47. [Google Scholar] [CrossRef]
- Li, X.; Oviedo-Trespalacios, O.; Rakotonirainy, A. Drivers’ gap acceptance behaviours at intersections: A driving simulator study to understand the impact of mobile phone visual-manual interactions. Accid. Anal. Prev. 2020, 138, 105486. [Google Scholar] [CrossRef]
- Hong, S.; Min, B.; Doi, S.; Suzuki, K. Approaching and stopping behaviors to the intersections of aged drivers compared with young drivers. Int. J. Ind. Ergon. 2016, 54, 32–41. [Google Scholar] [CrossRef]
- Carter, N.; Beier, S.; Cordero, R. Lateral and Tangential Accelerations of Left Turning Vehicles from Naturalistic Observations. SAE Technical Paper. 2019. Available online: https://assets.jsheld.com/uploads/PDFs/Lateral-and-Tangential-Accelerations-of-Left-Turning-Vehicles-from-Naturalistic-Observations.pdf (accessed on 30 April 2021).
- Petraki, V.; Ziakopoulos, A.; Yannis, G. Combined impact of road and traffic characteristic on driver behavior using smartphone sensor data. Accid. Anal. Prev. 2020, 144, 105657. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, J.; Zhu, Y.; Chen, Y.; Li, M. Abnormal driving behaviors detection and identification using smartphone sensors. In Proceedings of the 2015 12th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Seattle, WA, USA, 22–25 June 2015; pp. 524–532. [Google Scholar]
- Chauhan, B.P.; Joshi, G.J.; Parida, P. Driving cycle analysis to identify intersection influence zone for urban intersections under heterogeneous traffic condition. Sustain. Cities Soc. 2018, 41, 180–185. [Google Scholar] [CrossRef]
- Parker, M.R.; Zegeer, C.V. Traffic Conflict Techniques for Safety and Operations—Observers Manual. 1989. Available online: https://www.fhwa.dot.gov/publications/research/safety/88027/88027.pdf (accessed on 30 April 2021).
- Wang, X.; Abdel-Aty, M. Temporal and spatial analyses of rear-end crashes at signalized intersections. Accid. Anal. Prev. 2006, 38, 1137–1150. [Google Scholar] [CrossRef]
- Huang, F.; Liu, P.; Yu, H.; Wang, W. Identifying if VISSIM simulation model and SSAM provide reasonable estimates for field measured traffic conflicts at signalized intersections. Accid. Anal. Prev. 2013, 50, 1014–1024. [Google Scholar] [CrossRef] [PubMed]
- Li, G.; Lai, W.; Sui, X.; Li, X.; Qu, X.; Zhang, T.; Li, Y. Influence of traffic congestion on driver behavior in post-congestion driving. Accid. Anal. Prev. 2020, 141, 105508. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Liu, P.; Chen, Y.; Yu, H. Can Left-turn Waiting Areas Improve the Capacity of Left-turn Lanes at Signalized Intersections? Procedia—Soc. Behav. Sci. 2012, 43, 192–200. [Google Scholar] [CrossRef]
- Steinbakk, R.T.; Ulleberg, P.; Sagberg, F.; Fostervold, K.I. Effects of road work characteristics and drivers’ individual differences on speed preferences in a rural work zone. Accid. Anal. Prev. 2019, 132, 105263. [Google Scholar] [CrossRef]
- Ni, Y.; Li, K.; Xu, H. Research on waiting-area for left-turning vehicles in signalized intersection. Traffic Transp. 2006, 12, 32–36. [Google Scholar]
- Thapa, R.; Hallmark, S.; Oneyear, N. Braking behavior of major approach turning vehicles at rural two-way stop controlled intersections: A naturalistic driving study. Traffic Inj. Prev. 2020, 21, 308–312. [Google Scholar] [CrossRef]
- Huang, Y.; Sun, D.J.; Zhang, L.H. Effects of congestion on drivers’ speed choice: Assessing the mediating role of state aggressiveness based on taxi floating car data. Accid. Anal. Prev. 2018, 117, 318–327. [Google Scholar] [CrossRef]


















| Field | Value(s) |
|---|---|
| File_ID | Unique identifier for each vehicle trip |
| Frame at the stop line | Frame of the video when the stop line was last visible |
| Traffic density level | Sparse, medium, dense |
| Left-turn waiting area | Yes, No |
| Vehicle movement | Left turn, right turn, straight line |
| Intersection type | Four-legged intersection, T-type intersection, other |
| Weather | Sunny, cloudy, rainy |
| Signalized intersection | Yes, No |
| Pedestrian crossing | Yes, No |
| Traffic signal state of left turn | Video frame at the onset of green, yellow, and red |
| Traffic signal state of right turn | Video frame at the onset of green, yellow, and red |
| Traffic signal state of straight line | Video frame at the onset of green, yellow, and red |
| Number of the lane | 0–6 (from left lane to right lane) |
| Lane change record | The lane to change and the video frame at the onset of the changing lane |
| ME-ID | Unique identifier for object collected by Mobileye |
| Radar-ID | Unique identifier for object collected by Radar |
| Object type | Motorcycle, electric scooter, Bicycle, Vehicle, None |
| Phases | Symbol | Definition | Characteristics |
|---|---|---|---|
| Approaching phase | DTIa | Distance between the approaching starting point and the stop line. | Position to trigger brake pedal activation |
| TTIa | Time between approaching starting point and the stop line | Time to trigger brake pedal activation | |
| Decmax | Maximum deceleration during approaching phase | Deceleration level during approaching phase | |
| Stop–go phase | DTIs | Distance to the intersection at the approaching ending point | Position to stop or minimize speed |
| Numstop | Number of stops per vehicle | Capacity to travel through an intersection | |
| Duras | Time interval at stop–go phase | Capacity to travel through an intersection | |
| Traversal phase | DTIt | Distance between the approaching ending point and the stop line | Position to traverse an intersection |
| ACCstart | Starting acceleration at the traversal phase | Urgency for acceleration after the stop line | |
| ACCmax | Maximum acceleration at the traversal phase | Comfort acceleration boundary drivers maintained at the traversal phase |
| Independent Variable | Dependent Variable | Significant Level | Mean (±Standard Errors) |
|---|---|---|---|
| Traffic density | DTIa (m) | F(2, 371) = 0.66, p = 0.516 | Sparse: 46.72 (±2.74 SE) Medium: 54.11 (±2.98 SE) Dense: 67.05 (±3.70 SE) |
| DTIs (m) | F(2, 371) = 4.31, p = 0.014 * | Sparse: 0.57 (±2.02 SE) Medium: 13.68 (±2.27 SE) Dense: 33.73 (±3.37 SE) | |
| DTIt (m) | F(2, 371) = 1.88, p = 0.154 | Sparse: −4.57 (±1.80 SE) Medium: 7.12 (±2.32 SE) Dense: 14.67 (±2.88 SE) | |
| Traffic light state | DTIa (m) | F(1, 372) = 18.04, p < 0.001 *** | Red: 58.50 (±1.80 SE) Green: 32.06 (±5.24 SE) |
| DTIs (m) | F(1, 372) = 6.39, p = 0.012 * | Red: 15.39 (±1.37 SE) Green: −4.08 (±5.57 SE) | |
| DTIt (m) | F(1, 372) = 1.22, p = 0.27 | Red: 5.80 (±1.20 SE) Green: −4.09 (±5.25 SE) | |
| Intersection type | DTIa (m) | F(1, 372) = 1.63, p = 0.203 | Four-legged: 53.75 (±2.13 SE) T-type: 54.08 (±3.48 SE) |
| DTIs (m) | F(1, 372) = 3.55, p = 0.060 | Four-legged: 12.58 (±1.78 SE) T-type: 12.63 (±2.99 SE) | |
| DTIt (m) | F(1, 372) = 2.85, p = 0.093 | Four-legged: 3.88 (±1.59 SE) T-type: 4.55 (±2.64 SE) | |
| Left-turn waiting area | DTIa (m) | F(1, 372) = 0.009, p = 0.924 | Without LWA: 53.31 (±2.03 SE) With LWA: 56.08 (±4.07 SE) |
| DTIs (m) | F(1, 372) = 0.196, p = 0.659 | Without LWA: 12.84 (±1.70 SE) With LWA: 11.58 (±3.47 SE) | |
| DTIt (m) | F(1, 372) = 0.924, p = 0.337 | Without LWA: 5.36 (±1.53 SE) With LWA: −1.52 (±2.91 SE) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, L.; Li, P.; Su, Z.; Chen, T.; Deng, Z.; Sun, D. Longitudinal Driving Behavior before, during, and after a Left-Turn Movement at Signalized Intersections: A Naturalistic Driving Study in China. Sustainability 2022, 14, 11630. https://doi.org/10.3390/su141811630
Xia L, Li P, Su Z, Chen T, Deng Z, Sun D. Longitudinal Driving Behavior before, during, and after a Left-Turn Movement at Signalized Intersections: A Naturalistic Driving Study in China. Sustainability. 2022; 14(18):11630. https://doi.org/10.3390/su141811630
Chicago/Turabian StyleXia, Lihong, Penghui Li, Zhizhuo Su, Tao Chen, Zhaoxiang Deng, and Dihua Sun. 2022. "Longitudinal Driving Behavior before, during, and after a Left-Turn Movement at Signalized Intersections: A Naturalistic Driving Study in China" Sustainability 14, no. 18: 11630. https://doi.org/10.3390/su141811630