1. Introduction
China is the second largest economy and the largest developing country in the world, and consumes a huge amount of energy. As a non-renewable resource, coal provides an important energy carrier for industrial production and social life in China. Even though the demand ratio of coal decreases due to the gradual use of the green energy, it still plays an important role in the structure of world energy [
1]. According to the China Renewable Energy and Sustainable Energy Development Report, the proportion of coal will not fall below 50% by 2050. In China, the distribution of coal resources in the west such as Shanxi, Shaanxi, and Inner Mongolia is greater than that in the east. What’s more, the coal in the east is being gradually depleted, making the amount of mining in the west increase.
Coal mining has effectiveness in gaining energy for economic construction, but it would threaten human safety and social stability by causing surface collapse, landslides, destruction of agricultural cultivated land, ecological damage [
2,
3], especially in the west of China due to the fragile ecological environment [
4,
5,
6], surface damage under the influence of mining is mainly characterized by mining-induced fractures, as shown in
Figure 1. For surface cracks caused by coal mining, Yang found that the ground cracks were formed ahead of the working face and developed rapidly during the period of the breakage of the immediate roof by field monitoring methods [
7]. By means of field measurement and similar material simulation experiments, Zhou found that ground cracks are caused by strata deformation, but the formation of ground cracks can promote the deformation of strata. They also found that the horizontal tension deformation is the most stable factor for predicting ground cracks regardless of excavation speed [
8]. By means of unmanned aerial vehicles, ground penetrating radar, and real-time kinematic and manual measurements, He and Zhao found that ultra large mining height longwall panel extraction causes a greater ground subsidence and horizontal deformation than those of the conventions, resulting in more severe damage in the permanent margin area [
9]. Lian used field investigation, theoretical analysis and the particle flow code 2D numerical simulation method to study the movement of overburdened and discontinuous ground deformation of mining areas with a thick loess layer and a thin bedrock [
10]. These adverse effects are closely related with the surface movements and discontinuous deformation caused by underground mining in mountainous areas. Therefore, it is important to study the law of surface movement in mountainous mining areas according to the mining subsidence theory [
11], so that some necessary actions can be taken to protect the environment based on the precise movement laws.
Mining subsidence prediction is the core of mining subsidence theory, and includes theoretical methods, empirical methods, and experimental methods. The theoretical methods are elastoplastic theory, stochastic medium theory and the numerical calculation method, which have complex formulas and too many parameters related to the nature of rock strata which are not practical for engineering. The empirical methods need too much measured data and the method is useful for a typical mine; they do not have generality. The experimental methods mainly include similar material simulation experiments which are expensive and time-consuming. Compared with the methods above, the probability integral method is an official prediction method in China for its simpler mathematical expressions and clear-meaning parameters. It was first introduced to the strata movement research by the Polish scholar J. Litwiniszyn in the 1950s. Later, it was developed by Chinese scholars Liu Baochen and Liao Guohua. The probability integral method is based on the characteristics of horizontal and homogeneous media. It is accurate to predict coal mining whose coal seam dip angle is less than 5° in plain areas [
12,
13].
Due to the inherent landforms of mountainous areas, the surface movement and deformation caused by underground coal mining includes continuous deformation such as cracks and landslides, causing the situation to be very complicated [
14,
15]. The probability integral method is lacking in the prediction accuracy in mountainous areas. In this regard, further research on the prediction model of surface movement in mountainous mining areas is essential.
In the past decades, considerable research efforts have been devoted to the research on the prediction model of mining subsidence in mountainous areas. He and Kang analyzed the measured data of multiple ground movement observation lines in the mountainous areas represented by the Yangquan mining area in Shanxi, China. They compared data with the data in the plain areas and concluded that movement and deformation of the surface are related to the inclination direction of the surface and the nature of the topsoil [
16,
17]; then, the movement of the mountainous surface is considered to be the superposition of the mining influence component and the mining slip component from the perspective of the vector [
18]. The “slide influence function method” and “stress-strain” model is established for predicting the surface movement in mountainous areas; mathematical analysis and mechanical derivation were then conducted to build the relationship between movement, deformation and topographic features caused by the mining slips. Finally, they proposed a mathematical model for predicting surface movement and deformation in mountainous areas that it is suitable for horizontal or near-horizontal coal seam mining with the average slope angle of surface less than 30° [
19]. However, the existing mining subsidence prediction model in mountainous areas still has some shortcomings, and surface cracks caused by mining mean that the predicted results have a large discrepancy with the measured data, as the mechanism for the influence of topography on the laws of surface movement and deformation in mountainous areas have not been studied clearly.
At the same time, there are a lot of parameters in a prediction model, and the accuracy of prediction results also depends on the rationality of the prediction parameters. For the acquisition of parameters in a model, conventional methods are susceptible to problems such as parameter divergence and local optimization. The problem of obtaining the expected parameters is still to be solved. A typology of the parameters inversion methods about the probability integral method is commonly summarized as two sets of algorithms, the traditional one and the intelligent optimization method. The tradition methods include the linear least square and pattern search method, which have good accuracy for the linear model. However, when facing the nonlinear model like the probability integral method studied in this paper, there are problems such as high initial value requirements, divergence during the solution, and easy to be in the local optimal solution mainly because of the correlation between parameters. The intelligent optimization methods, including genetic algorithm, particle swarm optimization (PSO), and simulated annealing algorithm (SAA) provide effective solutions in the non-linear model since they partially overcome the weakness of traditional methods in divergence. Zha and Li demonstrated these advantages of the GA by comparing with the performance of the least square and pattern search method in parameters inversion in the probability integral method under complex conditions [
20,
21]. These advantages were also verified with other intelligent methods, including PSO [
22], SAA [
23], quantum annealing [
24,
25,
26], and the fireworks algorithm [
27], The invasive weed optimization [
28].
Considering that problems still exist in the classic intelligent optimization algorithms, such as slow convergence speed, a large amount of calculation, and easy to fall into local optimum, it is necessary to innovate a new method in parameter inversion. The fruit fly optimization algorithm (FOA), as one of the effective population-based metaheuristic approaches proposed by Pan [
29,
30,
31], has been successfully applied in many regions such as stochastic multi-objective integrated disassembly-reprocessing reassembly scheduling [
32], forecasting and optimizing agrobacterium-mediated genetic transformation [
33], solving the multi-functional heterogeneous UAV cooperative mission planning problem [
34], and short-term traffic flow prediction [
35], while fewer scholars connect the FOA with the parameters inversion in mining subsidence.
To improve the performance of the FOA associated with the initial fruit fly swarm location, the population size, step length. In order to increase the universality of the FOA, scholars have proposed many improved methods to make the algorithm improve in terms of the computational complexity, stability and accuracy [
30,
36,
37,
38,
39,
40]. For the step length, if it is large, the global optimization performance is improved, the local optimization performance is declined, and vice versa. The constant step length makes the FOA unable to converge to an optimal solution rapidly. In this paper, a dynamic step is proposed based on the FOA to improve the performance of the algorithm. The search step in each iteration is related to the ratio of the best smell concentration value of the current and previous generations.
Accurate prediction of the movement and deformation of mining subsidence in mountainous areas facilitates the prevention and control of geological disasters, therefore, it is necessary to build a mining subsidence prediction model in mountainous areas based on the probability integral method, taking the mountain topography (slope angle α < 30°) and geological conditions (loess covered) into account. Simultaneously, it is important to select an effective parameters inversion method of the probability integral method; the prediction accuracy of mining subsidence prediction model in mountainous areas can be enhanced with the two aspects above. In this study, a practical prediction model in mountainous areas is proposed, and the probability integral method and slopes slip analysis are combined in the proposed model. The intelligent optimization algorithm and mechanics analysis are applied for the determination of parameters in the proposed model, the acquisition of parameters is more efficient, and the values of parameters are more objective and reasonable. The contributions of this study can be summarized as follows: (1) the theoretical model considering slopes slip (slip subsidence ΔW, slip horizontal movement ΔU) in mountainous areas based on the probability integral method is established, the effect of the influence of topography is considered in this model combined with the slope angle and nature of topsoil; (2) The more accurate parameters of the probability integral method in the proposed model are obtained by the algorithm of parameters inversion which is the dynamic step fruit fly optimization algorithm (DSFOA); and (3) The other parameters about slopes slip are determined by mechanics analysis based on the nature of soil, which is more objective and reasonable.
2. Methodology
2.1. Probability Integral Method
The probability integral method is based on the stochastic medium theory, which was first introduced to strata movement research by the Polish scholar J. Litwiniszyn in the 1950s. Later, it was developed by Chinese scholars Liu Baochen and Liao Guohua et al. into a probability integral method [
41].
The movement law of the stochastic medium theory can be abstracted into the theoretical model shown in
Figure 2. The granular medium can be comprehended as a small and uniform ball, assuming that the first layer of ball C is taken away, then the probability of the second layer of two balls A and B falling into the space is 1/2 separately, and so on the probability of the movement of balls in each layer. The probability distribution fitting a curve can be seen to be close to the standard normal distribution probability density curve.
Referring to
Figure 3a, considering the two-dimensional condition, surface subsidence caused by underground unit mining
We(
x) is shown in Equation (1):
Considering that the assumption of the volume is constant, shown in Equation (2), surface horizontal movement caused by underground unit mining
Ue(
x) is shown is shown in Equation (3):
where
εx is the linear strain along the x direction,
εz is the linear strain along the z direction. Minus “−” represents the w-axis is opposite to the
Z-axis.
B =
b·
r,
b is the horizontal movement coefficient,
r is the major influence radius(m),
i(
x) is the inclination.
As shown in
Figure 3b, assuming that the coal seam is inclined, the calculation formula of subsidence value of surface point A(
x,
y) caused by mining unit B(
s,
t) is shown in Equation (4):
where
r is the major influence radius (m);
θ0 is the mining influence propagation angle (°);
H is the average mining depth (m).
According to the superposition principle, the subsidence of a point A caused by the whole mining area is:
where
w0 =
mqcos
γ is the maximum surface subsidence value under the critical extraction,
m is the thickness of coal seam (m),
q is the subsidence coefficient, and
γ is the average dip angle of coal seam (°),
R represents the mining region.
For the rectangular working panel, the surface subsidence
W(
x,
y) is:
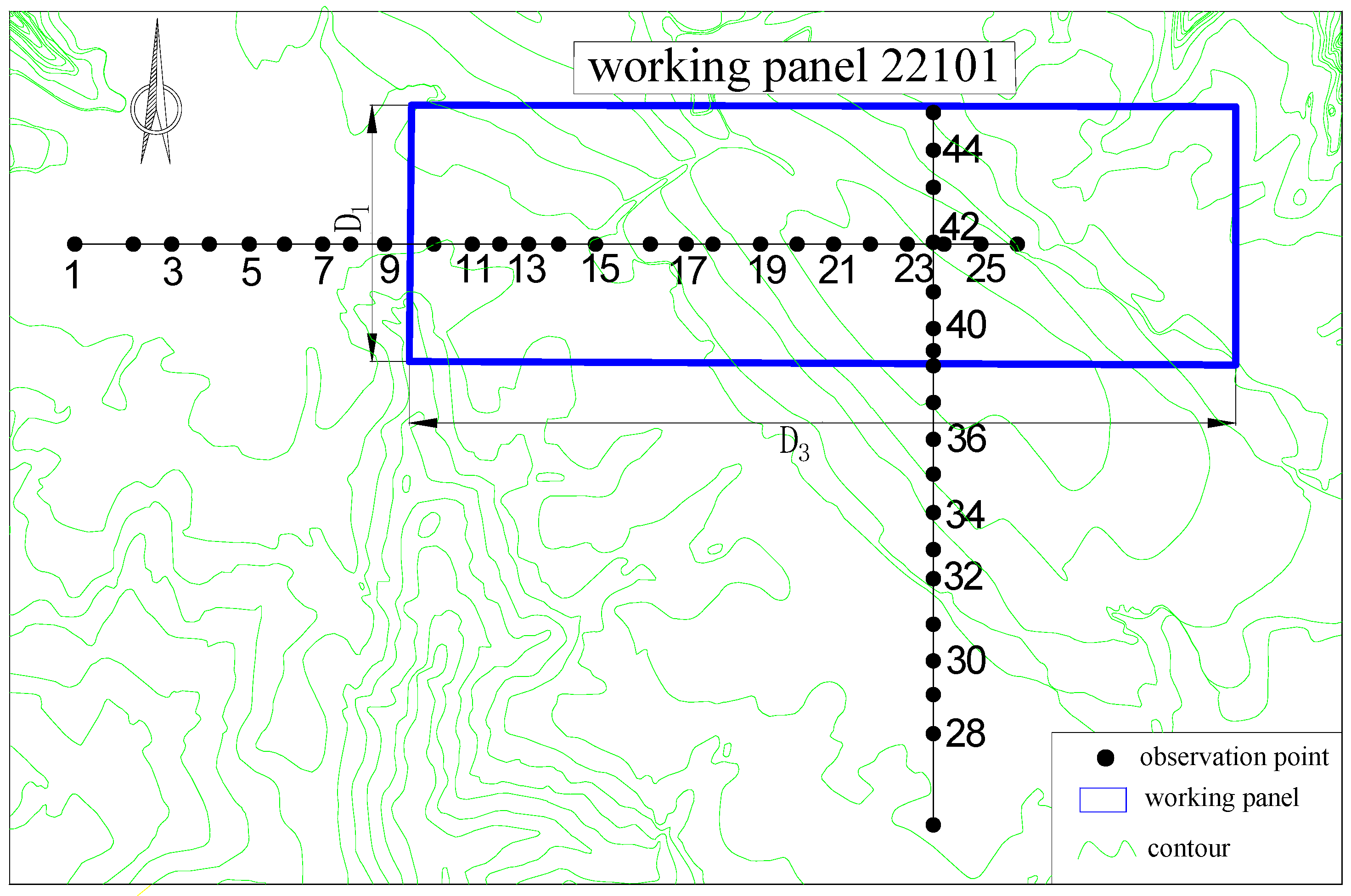
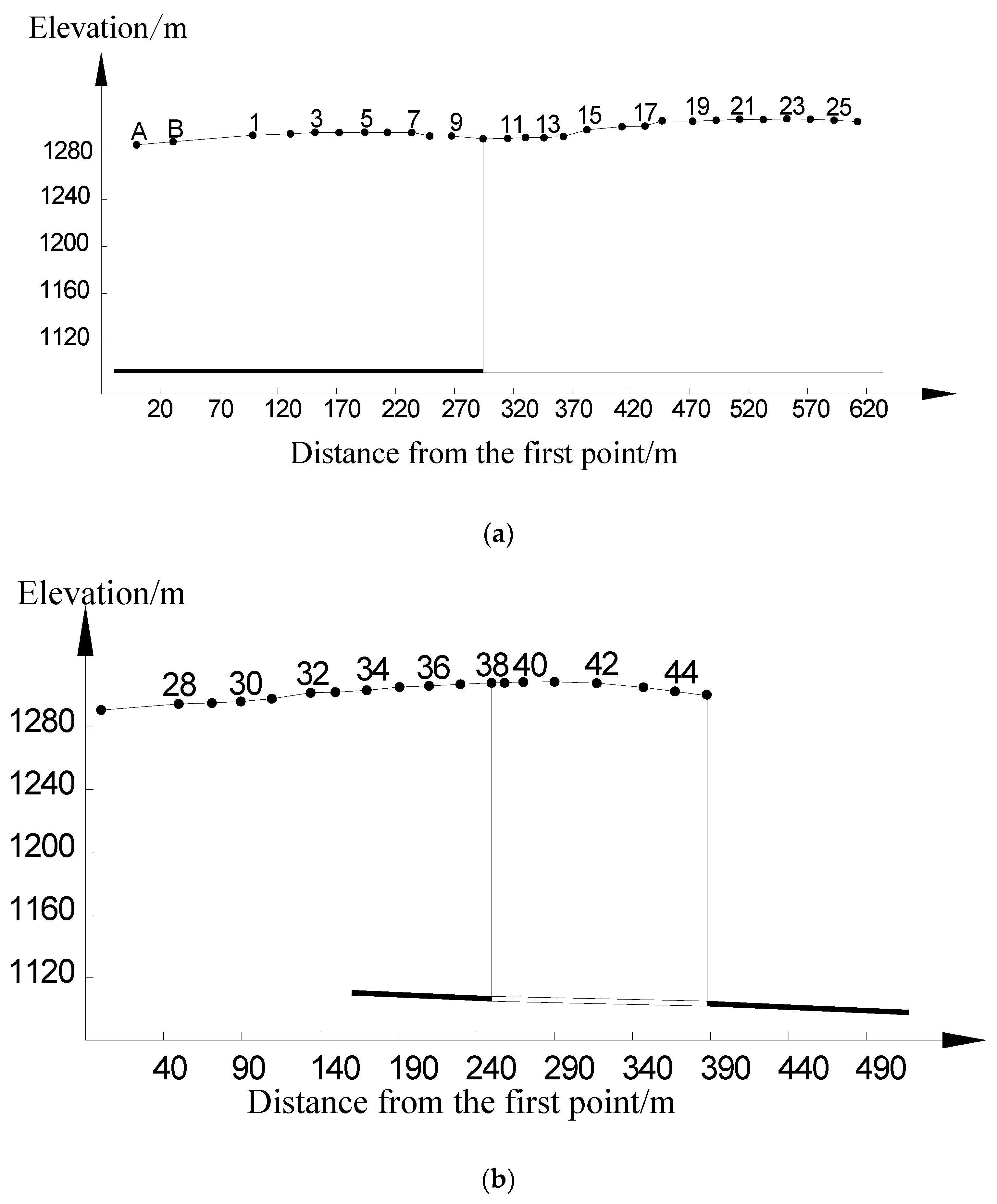
where
D1 and
D3 are the inclination and strike lengths of the working panel; s
1, s
2, s
3, and s
4 are the inflection point offsets of downhill, uphill, left, and right borders; tan
β is the main influence tangent.
The inclination
i(
x,
y,
φ) of a point A(
x,
y) on the surface in
φ direction (the angle that the positive
x-axis counterclockwise to the specified direction, in
Figure 3b is as follows:
For the horizontal movement
U(
x,
y,
φ), the curvature
K(
x,y,φ) and horizontal deformation ε(
x,
y,
φ) of a point A(
x,
y) in
φ direction can be obtained by Equations (13)–(15).
2.2. Fruit Fly Optimization Algorithm
The fruit fly optimization algorithm (FOA) is a new swarm intelligent optimization algorithm proposed by professor Pan Wen-Tsao based on the cooperative and competitive behavior of fruit flies in the food finding process.
The fruit fly itself is superior to other species in sensing and perception, especially in osphresis and vision. According to the process of fruit flies foraging through the senses, the basic principle of the fruit fly optimization algorithm [
30] follows by two steps:
First is the rough positioning stage by osphresis: they judge the approximate position of the food based on scents floating in the air and fly towards the target.
Second is the precise positioning stage by vision: when fruit flies fly around the food and are able to visualize within the search range, they can accurately determine the specific location of the food, and they finally fly to the food.
The detail processes are considered as follows:
Step 1: Initialize parameters. First, the initial fruit fly swarm location (
X-axis,
Y-axis), the maximum iteration number (
maxgen), the population size (
sizepop), the random direction
rand( ) and step length
k should be considered.
Step 2: Evolution starting. The generation = 0, the random flight path and the route for food finding of a single fruit fly are considered.
Step 3: Preliminary computations. The specific direction of the food is determined by calculating the distance
Disti of the individual fruit fly from the initial position. Subsequently, smell concentration judgment value
Si is determined. Then, the fitness function value (also called the smell concentration
Smelli) is calculated.
Step 4: Record the optimal individual and the location. Compare the smell concentration values of fruit flies in the current population and mark the fruit fly individual with the highest (or lowest) smell concentration as the optimal fruit fly individual. Record and keep the best smell concentration value
bestSmell and the coordinates position (
X,
Y) of the optimal fruit fly individual. The fruit fly swarm will use vision to fly towards that position:
Step 5: Iteration stops. Consider generation = generation + 1, the fitness function value is determined again. Judge if the smell concentration is superior to the previous iterative smell concentration. When the generation attains the maximum iteration number, and the optimized parameter value of the specific model can be reached. Otherwise, the optimization process should go back to Step 2.
2.3. Dynamic Step Fruit Fly Optimization Algorithm
The performance of the FOA is associated with the initial fruit fly swarm location, the population size, and step length. In order to increase the universality of the FOA, scholars have proposed many improved methods to make the algorithm improve in terms of computational complexity, stability and accuracy [
31,
37,
38,
39,
40,
41]. For the step length, if it is large, the global optimization performance is improved, the local optimization performance is declined, and vice versa. The constant step length makes the FOA unable to converge to an optimal solution rapidly. In this paper, the dynamic step fruit fly optimization algorithm (DSFOA) was applied for parameters inversion in the proposed prediction model to improve the performance of the algorithm. The search step in each iteration is related to the ratio of the best smell concentration value of the current and previous generations. The improved search step of the FOA is as follows (take the minimum smell concentration as an example).
Let g be the number of iterations, kg be the search step length of the gth iteration, S′g be the optimal smell concentration value of the gth iteration, Δ = |S′g—S′g−1|;
When g = 1, k1, S′1 is calculated;
When
g ≥ 2, if
S′g <
S′g−1, it indicates that the current optimal smell concentration value is better than the previous generation optimal smell concentration value, the step should be shorted to improve the optimization accuracy, then
if
S′
g ≥
S′
g−1, it indicates that the optimal smell concentration value of the previous generation is better than or equal to the current optimal smell concentration value. The step should be enlarged to increase the search range and improve the global search ability.
The horizontal movement U is mainly affected by topography in mountainous areas, the distribution law of the horizontal movement is relatively complicated, the law of subsidence is relatively simple and clear due to its unvaried vertical downward direction. The prediction parameters q, tanβ, θ0, si (i = 1, 2, 3, 4) related to the subsidence values were inversed first, and the horizontal movement coefficient b related to the horizontal movement U was obtained separately.
Set
p = [
q tanβ θ0 s1 s2 s3 s4],
P is the search space of vector
p (the value range of the prediction parameters), and the optimization principle which is used as the fitness function(
fp) is the minimum mean square error (MSE) between fitting values of the probability integral method whose parameters are obtained by DSFOA and the measured data of the corresponding
n points.
fp is shown in Equation (23):
where
Wi is the measured subsidence values,
wi is the fitting subsidence values, and
n is the number of observation points.
Set the search range and step length of the parameter vector p. The procedure of prediction parameters inversion of the probability integral method based on the subsidence values is as follows:
- (1)
Set the parameters such as the initial populations number and the maximum iteration number, and generate the initial population according to the range of the probability integral method parameter vector p. The position of initialization population is the initial solution of the N-dimensional vector, and N is the number of parameters optimized (N = 7).
- (2)
Calculate the fitness function value, combine the information of the working panel to the mining subsidence of the probability integral method and update the step.
- (3)
In each iteration process, judge and select the population with the optimal fitness value, and loop until the optimal solution is found.
Then, the horizontal movement coefficient b is inversed, and the fitness function(
fp) as in Equation (24):
where
Ui is the measured horizontal movement values,
ui is the fitting horizontal movement values, and
n is the number of observation points.
2.4. Prediction Model of Mining Subsidence in Mountainous Areas Considering Slopes Slip
The surface of the mountainous areas affected by mining will produce discontinuous deformation, especially ground fissures. During the development of the surface movement, slopes slip can occur easily, which has an obvious impact on the law of surface movement and deformation in mountainous areas.
The formation mechanism of tensile mining fissures and slopes slip are combined to analyze a prediction model of mining subsidence in mountainous areas considering that slopes slip is established in this section.
2.4.1. Expression of Movement Vector and Slopes Slip Vector
The reason why the law of surface movement and deformation in mountainous areas is different from that of plain areas is mainly due to the effect of the additional slopes slip caused by topography. In order to explore the law of mining subsidence in mountainous areas, the movement vector is introduced, as shown in the right of
Figure 4.
The movement vector
R′
i(
x,
y) at a point P
i on the mountainous surfaces under the influence of coal mining can be regarded as the sum of the movement vector
Ri(
x,
y) produced by mining in the plain areas and slopes slip vector Δ
Ri(
x,
y) on the mountainous surface. It can be expressed as the superposition principle shown in Equation (25):
where:
In the left part of
Figure 4,
W′(
x,
y) and
U′(
x,
y) represent the measured subsidences and horizontal movements,
W(
x,
y) and
U(
x,
y) represent the subsidence and horizontal movements of plain areas under similar geological and mining conditions which can be evaluated with the probability integral method, Δ
W(
x,
y) and Δ
U(
x,
y) represent the slip subsidence and slip horizontal movement affected by mountain topography, which are deduced in
Section 2.4.2.
2.4.2. Establishment of the Mining Subsidence Prediction Model
In this section, the slip subsidence Δ
W(
x,
y) and the slip horizontal movement Δ
U (
x,
y) are deduced based on the subsidence
W(
x,
y), the horizontal movement
U(
x,
y),the inclination
i(
x,
y,φ) and horizontal deformation ε(
x,
y,φ) in the probability integral method, then the mining subsidence prediction model in mountainous areas is established based on the
W(
x,
y),
U(
x,
y), Δ
W(
x,
y) and Δ
U(
x,
y). According to Equation (29):
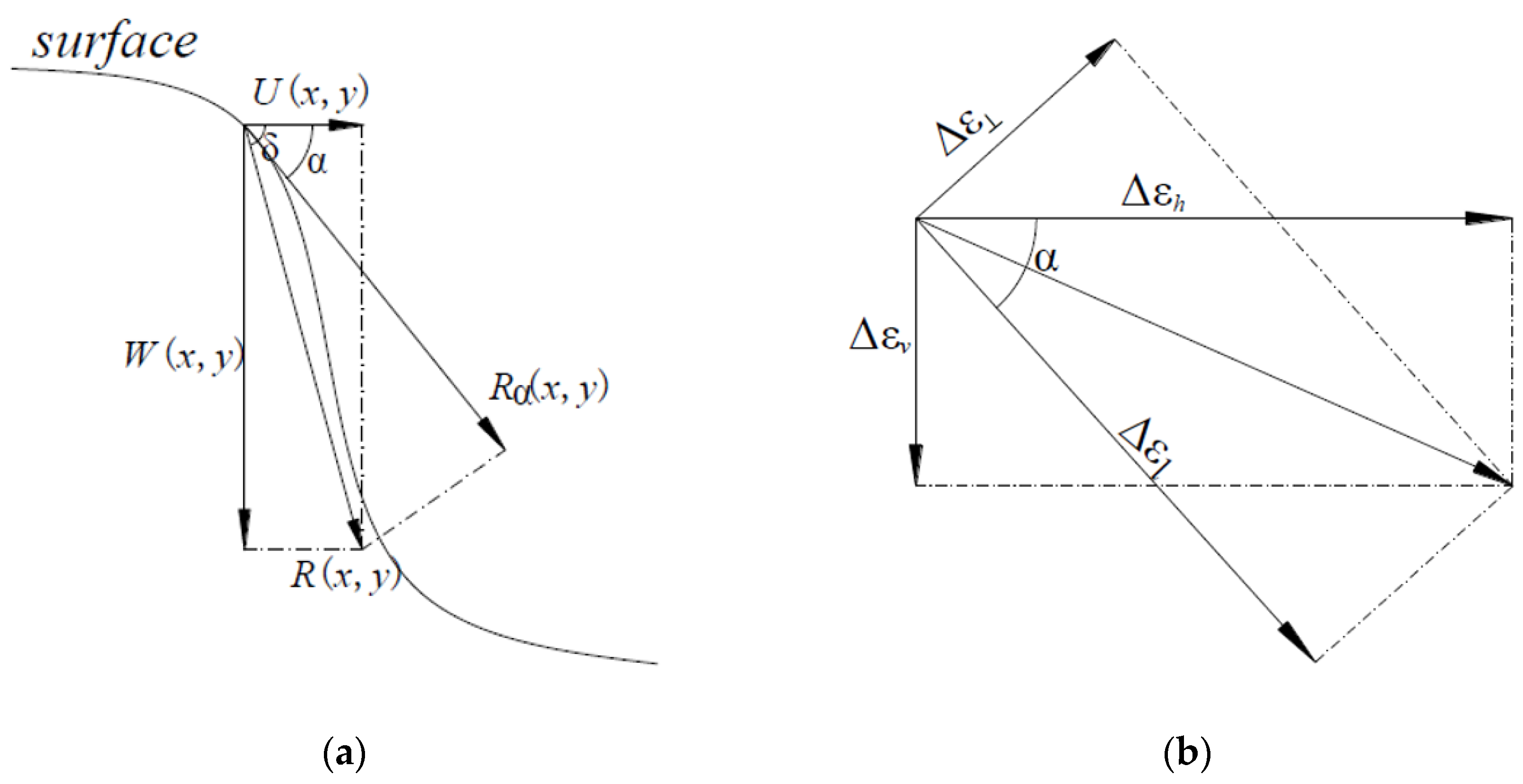
Since the slip vector Δ
R(
x,
y) is the additional slip caused by the mining vector
R(
x,
y), the component of the mining vector
Rα(
x,
y) along the inclination direction of the surface slope determines the magnitude of the slip vector Δ
R(
x,
y) (
Figure 5a).
From
Figure 5a, we can deduce:
where
Ks is the surface characteristic coefficient, which is related to the topography and surface soil properties,
δ is the angle between the mining vector
R(
x,
y)and the horizontal movement component
U(
x,
y), and its value is
δ = tan−1 (W(x,y)/U(x,y)), α is the slope angle of the surface.
Square both sides of the equation and make the partial derivatives of
l on both sides:
where
l is the length along the inclination direction of the slope.
As
∂l = ∂
x/cosα, from Equations (30) and (31), we have:
Square both sides of the Equation (29) and make the partial derivative of
x:
According to the probability integral method, ∂
W/∂
x =
i(
x,
y)
x, ∂
U/∂
x =
ε(
x,
y)
x,
φ = 0°.
For
W(
x,
y)/
R(
x,
y) = sin
δ,
U(
x,
y)/
R(
x,
y) = cos
δ, we have:
We suppose Δεl = ∂ΔR/∂l, it is the deformation of the slip vector along the l direction.
According to the concept of the Poisson’s ratio, the deformation along the direction perpendicular to the slope direction is:
where
µ is Poisson’s ratio for the topsoil.
In
Figure 5b, we have Equations (37) and (38):
Considering Equations (37) and (38), slip horizontal movement Δ
U and slip subsidence Δ
W are shown below:
2.4.3. Calculation of the Values of the Parameters in the Mining Subsidence Model
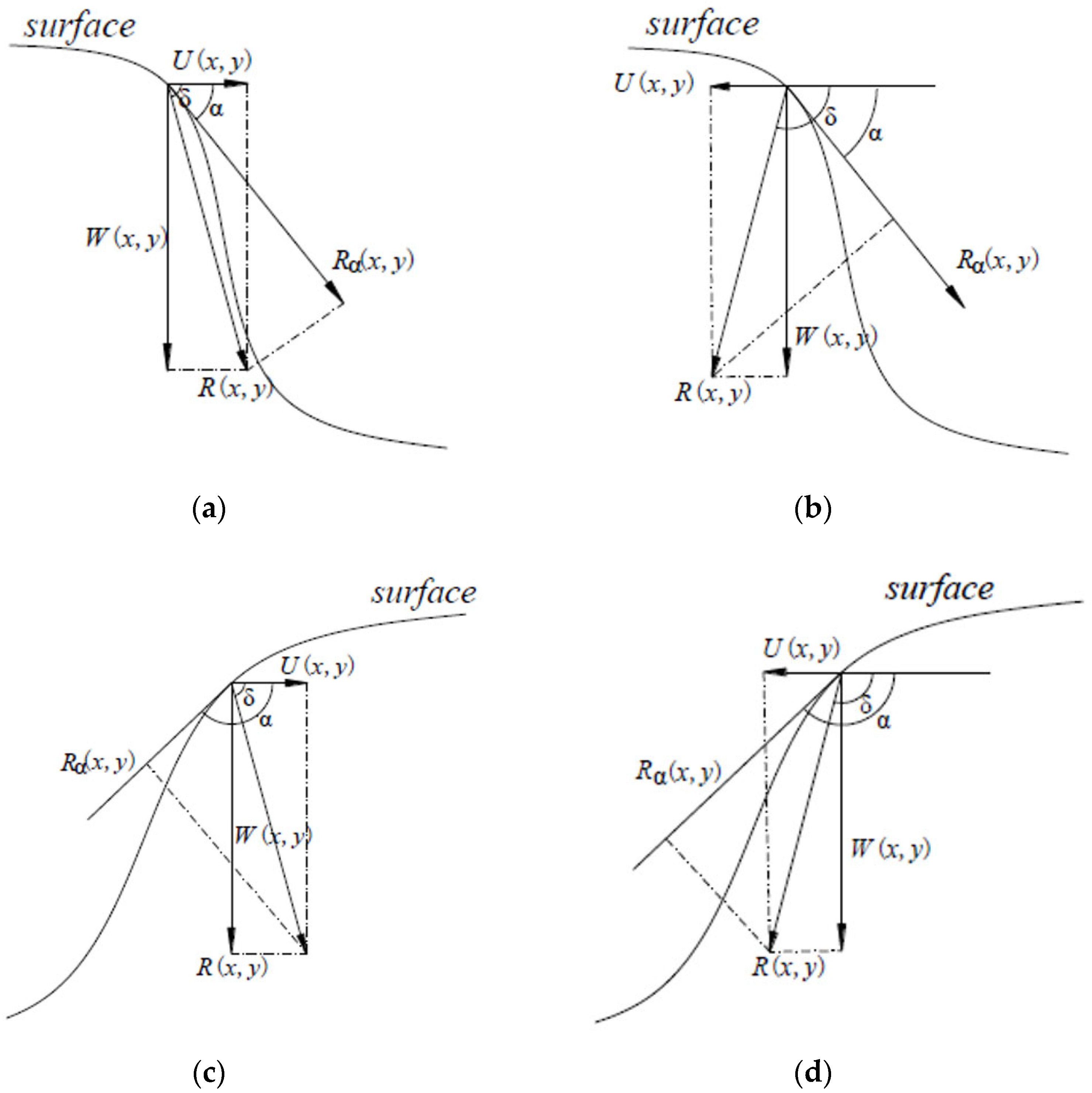
In Equations (39) and (40), parameters δ and Ks should be determined, as they are strongly associated with the geological and mining conditions and the nature of the topsoil. Parameters δ and Ks are important in the proposed mining subsidence model in mountainous areas, and they are discussed in this section.
Values about δ:
When the slope is shown in
Figure 6a,c, δ = tan
−1 (
W(
x,
y)/
U(
x,
y)); when the slope is shown in
Figure 6b,d,
δ = 180° + tan
−1 (
W(
x,
y)/
U(
x,
y)).
If the direction of W(x,y) is downward, W(x,y) > 0; if the direction of U(x,y) is directed to the goaf, U(x,y) > 0, vice versa.
Values about surface characteristic coefficient Ks:
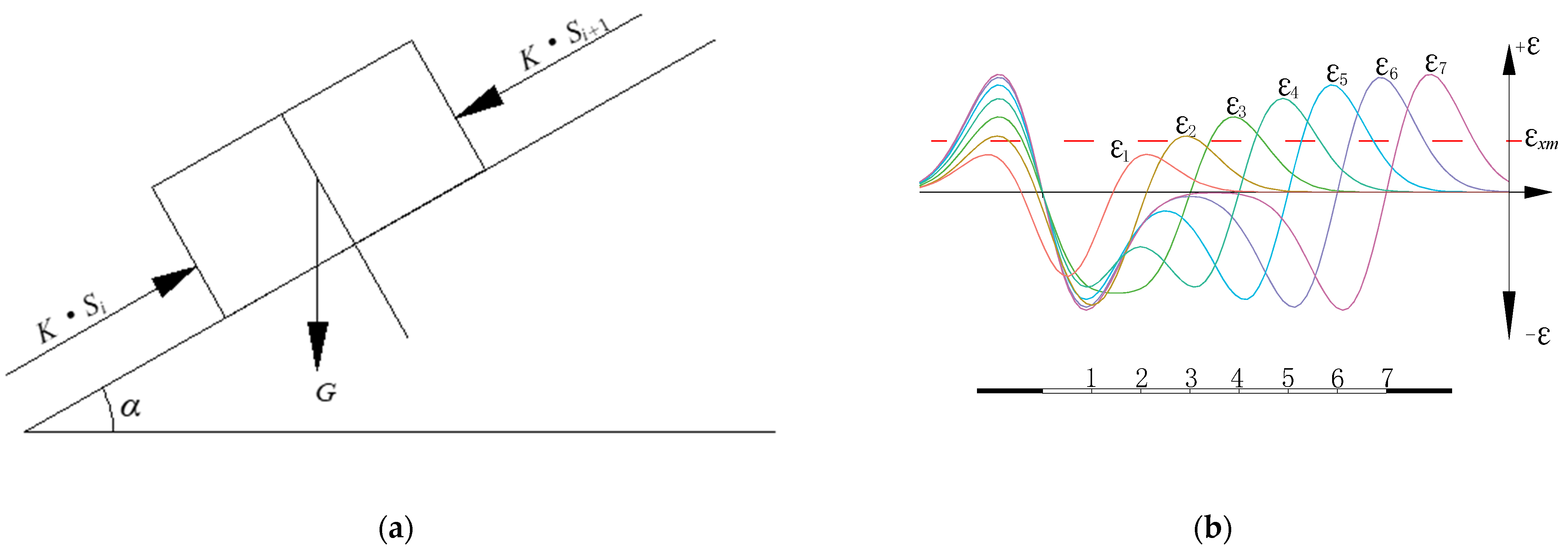
The surface soil cannot withstand tensile stress, therefore, when a small tensile stress is generated on the mountain surface under the influence of mining, then the cracked surface slope block will slip.
As shown in
Figure 7a, the slip amount of the slope is analyzed.
The surface characteristic coefficient KS reveals the influence degree of the topography on the amount of slip, which is mainly related to the topography and the nature of the soil.
Select a unit block
i, the length along the slope direction is Δ
l, the height along the slope normal direction is Δ
h, the slip amount of the
ith block is
Si, Suppose that
ith block undergoes resistance from the (
i − 1)th block below itself when it slips and the resistance is proportional to the amount of
ith block slips, which refers
KSi, and it also bears the force generated by the slip of the upper (
i + 1)th block, namely
Ksi+1. The block tends to balance after it slips:
In Equation (41), K is the compressive modulus of the topsoil, φ is the internal friction angle of the soil, G is the weight of the unit block, G = ρg·Δl·Δh, ρ is the natural density of the topsoil, g is the gravitational acceleration.
The value of
ε(
x,
y)
x in Equation (43) is the critical horizontal deformation value when the slope starts slipping, shown in Equation (44) [
42].
During the process of the coal mining, if the tensile deformation of a point does not exceed
εxm or the horizontal deformation is always compression deformation, the maximum of the horizontal deformation is selected, as shown in
Figure 7b.
According to the probability integral method, from
Figure 7b, when the coal unit 1 is mined, the curve of horizontal deformation is shown in
ε1, when the coal unit 1 and the coal unit 2 are mined, the curve of horizontal deformation is shown in
ε2, and the other coal units are similar. When the horizontal deformation of a point on the surface exceeds
εxm for the first time during the process of coal mining, the slip subsidence Δ
W(
x,
y) and the slip horizontal movement Δ
U(
x,
y) are calculated. When
ε(
x,
y)
x is determined
, i(
x,
y)
x is also determined.
5. Conclusions
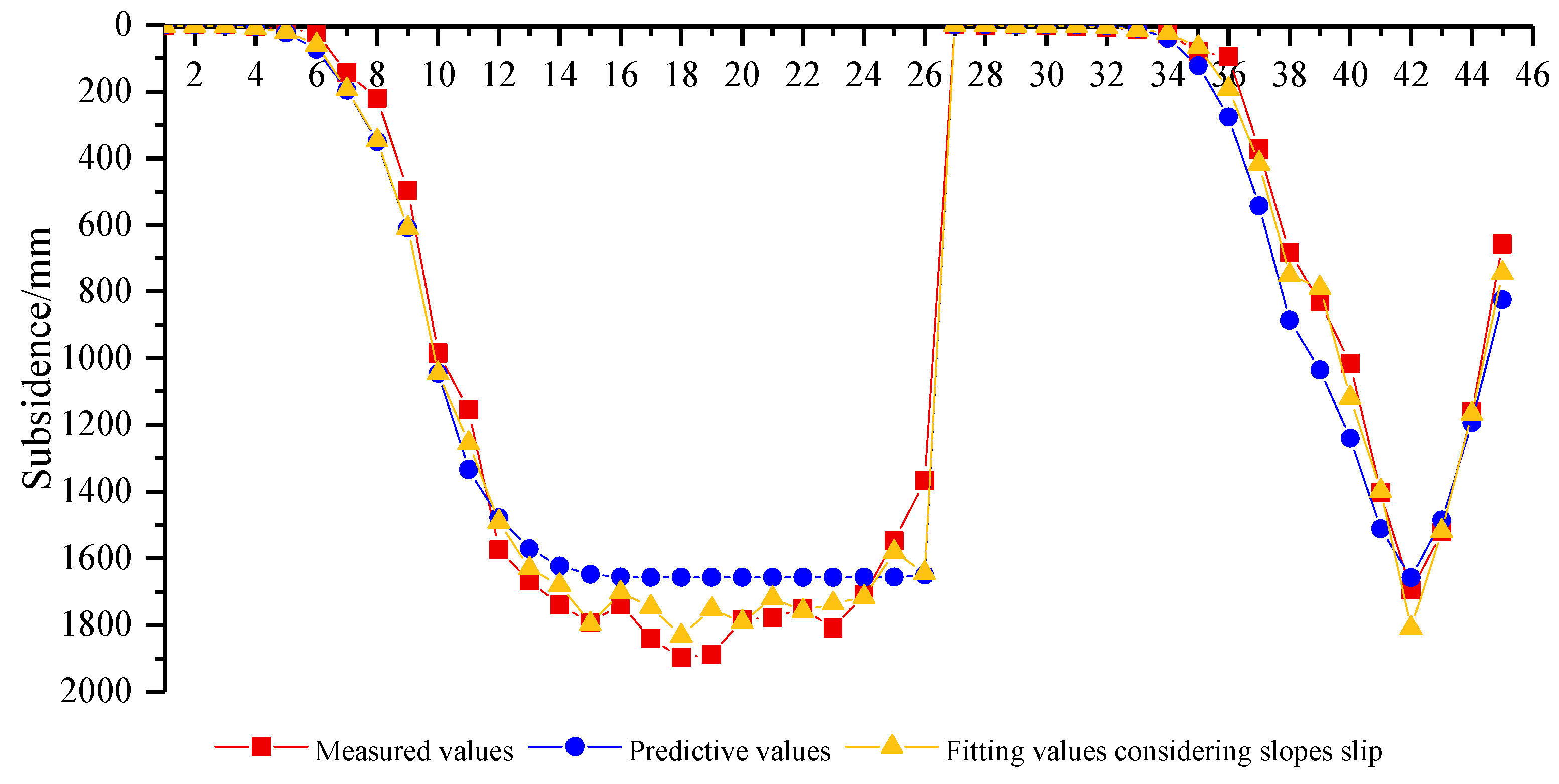
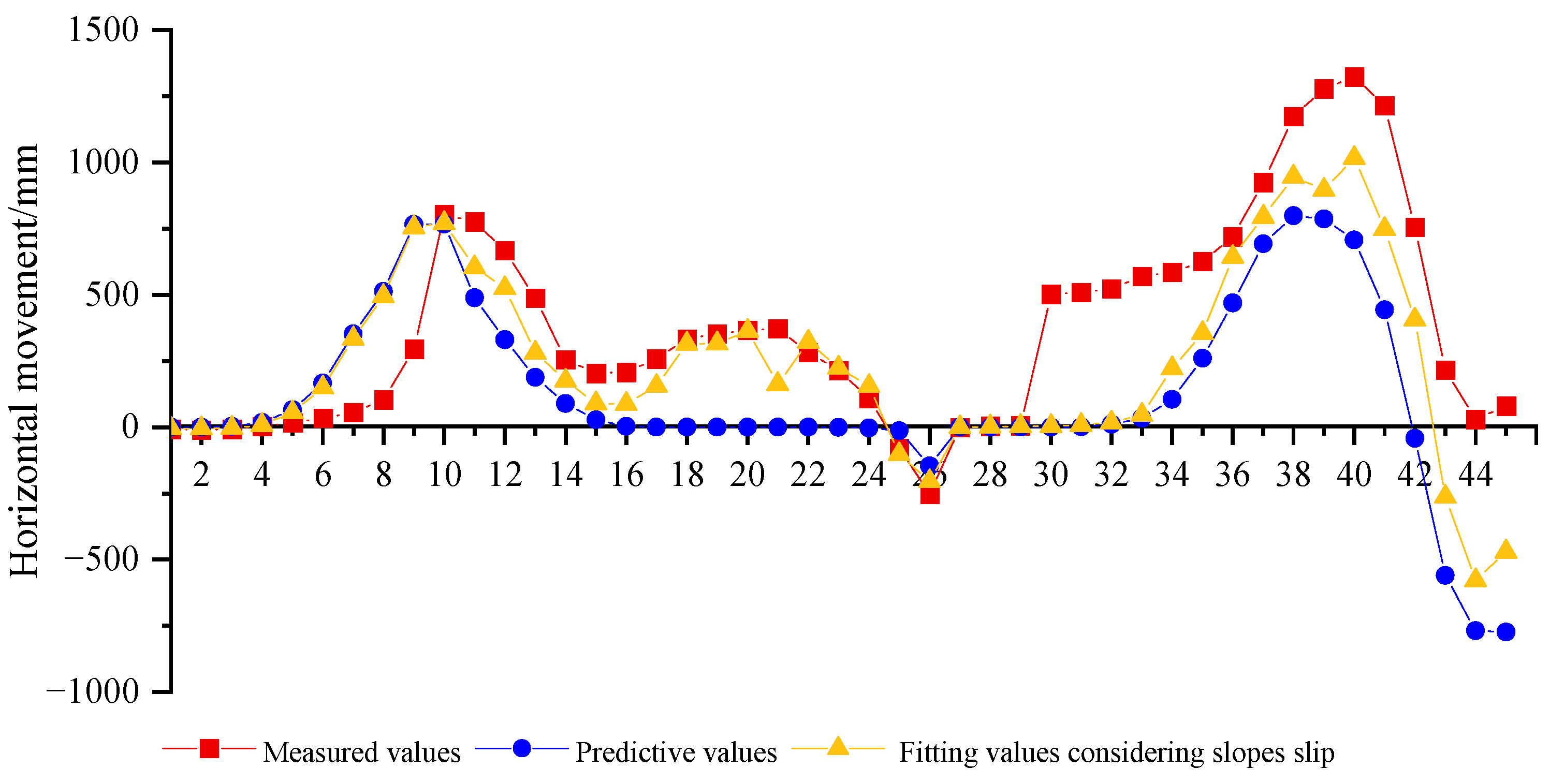
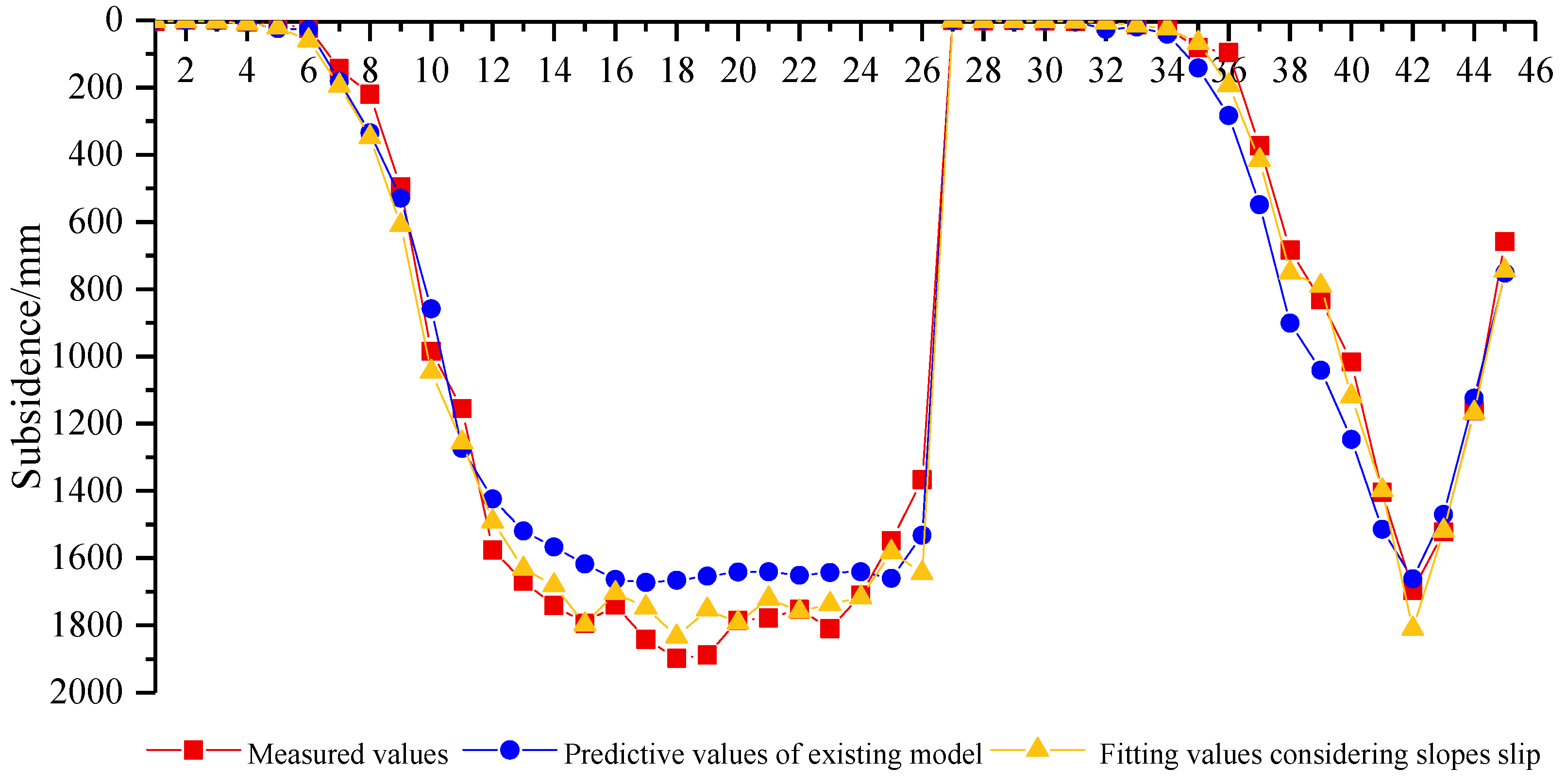
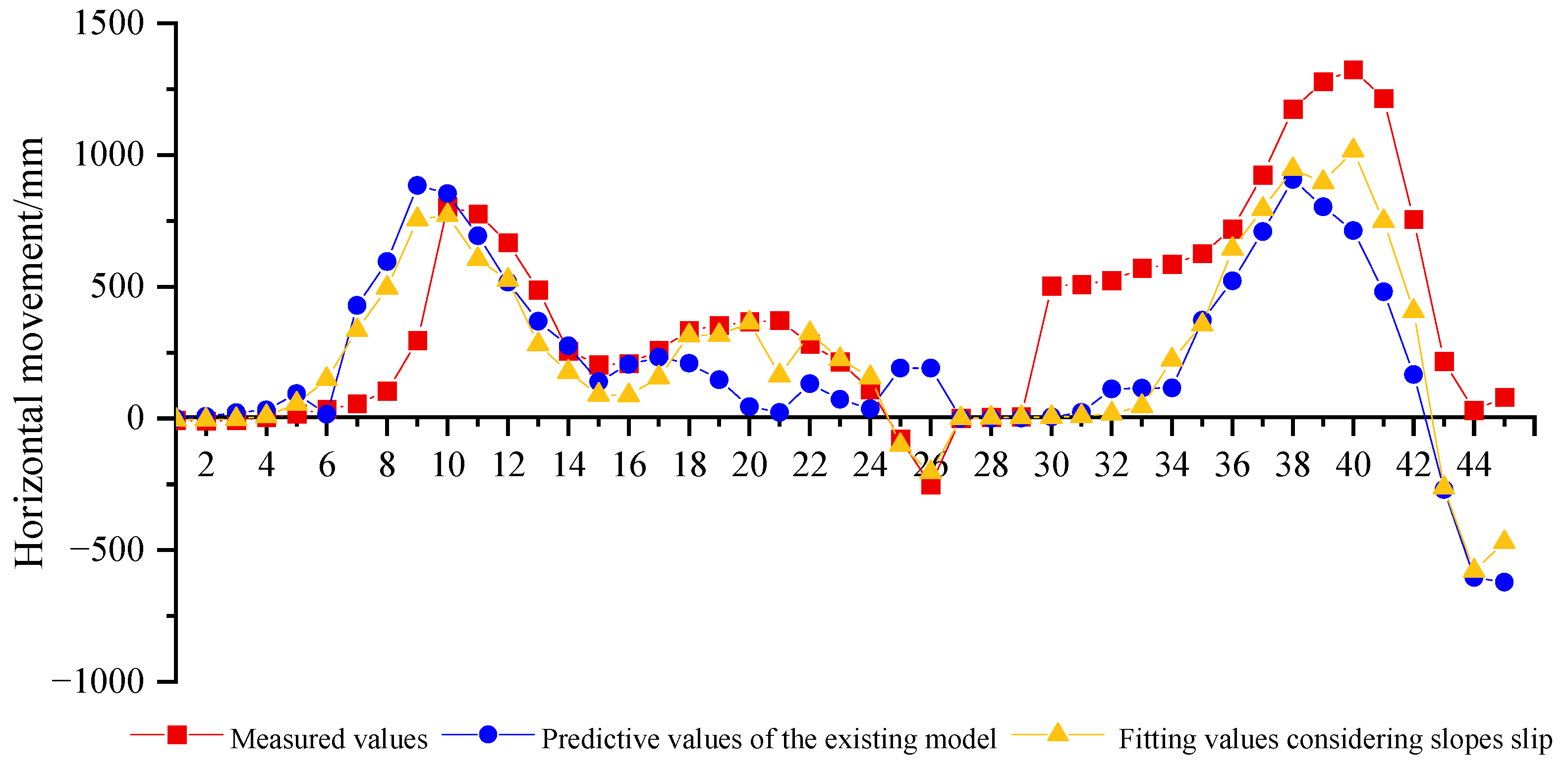
Understanding the law of surface movement in mountainous mining areas is important for sustainable development and geological hazard assessment. In this study, the relevant issues of mining subsidence in mountainous areas were systematically analyzed. A new practical prediction model of mining subsidence in mountainous areas considering slopes slip is proposed. The prediction formula of slip subsidence ΔW and slip horizontal movement ΔU is deduced considering movement and deformation values (W, U, i, ε) in the probability integral method. Aiming at the contradiction between the step length and global optimal solution of the FOA, the dynamic step fruit fly optimization algorithm (DSFOA) is proposed to conduct the parameter inversion of the practical model so that the performance of parameter optimization for the FOA is improved. For the determination of parameters in the model, the acquisition of parameters of the probability integral method is more efficient and accurate; the determination of the other parameters about slopes slip in the proposed model are more objective and the meaning of the parameters are clear, while for the existing model it shows relatively strong subjectivity. It would make the large discrepancy between the predictive values and measured values.
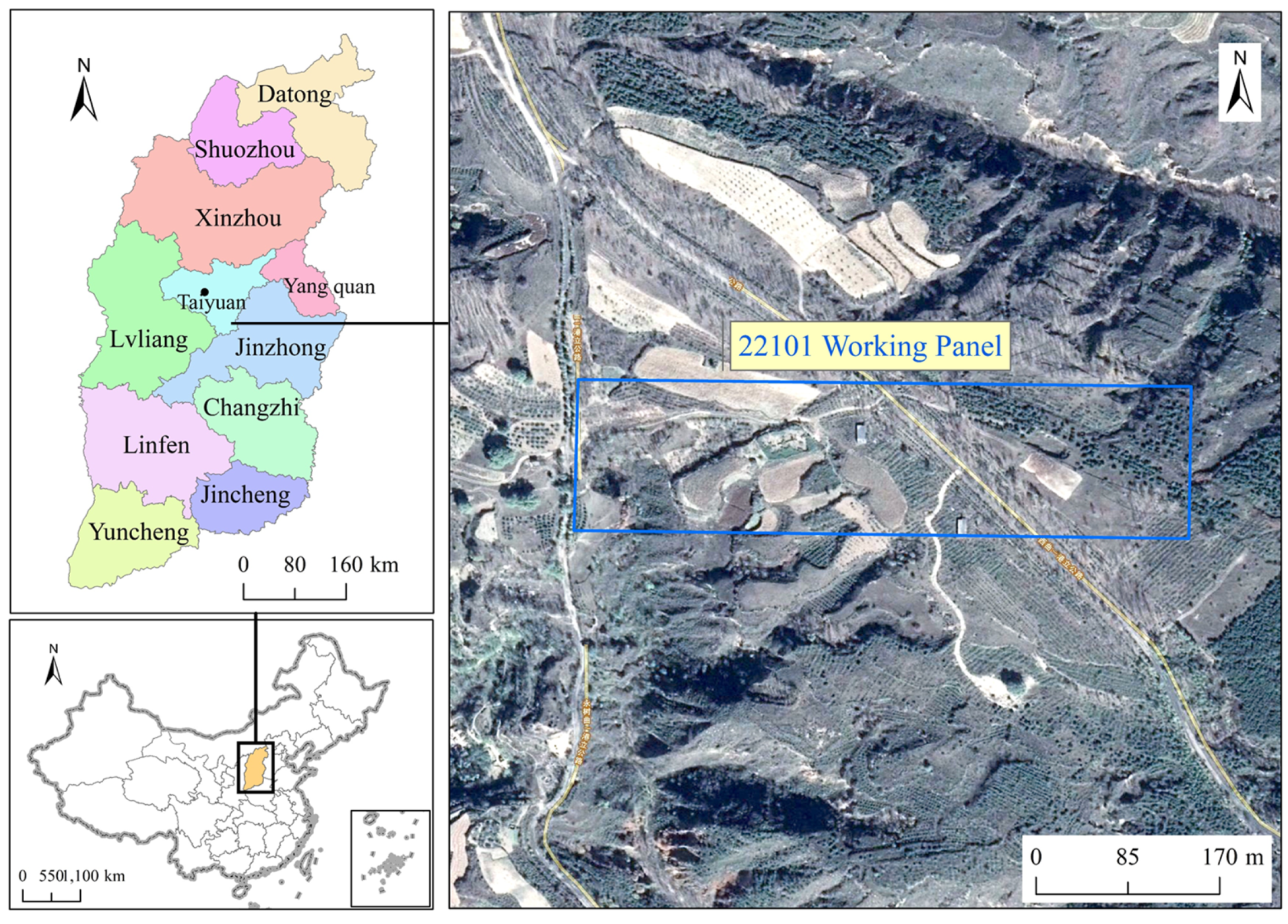
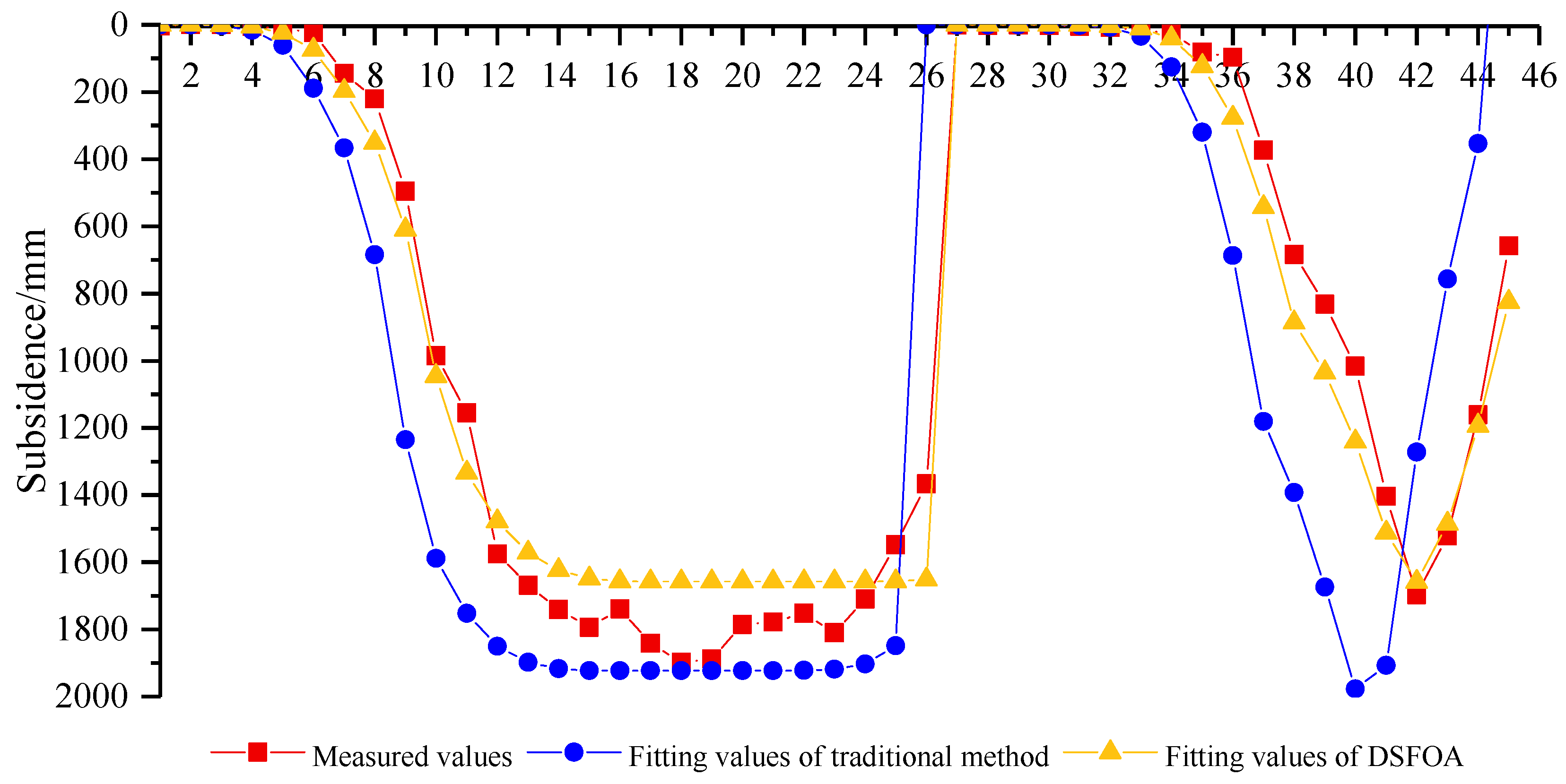
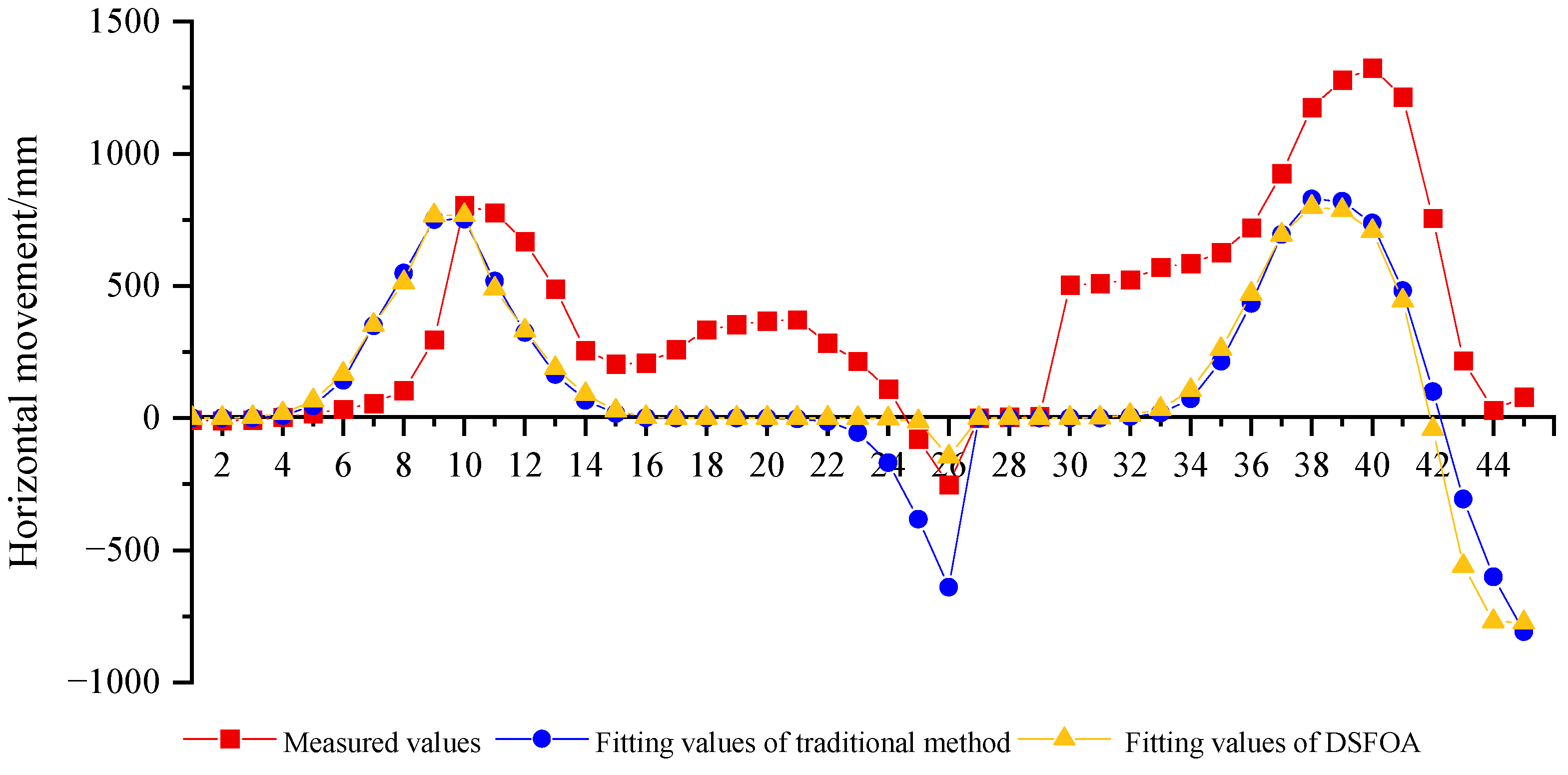
Taking the measured data of the 22,101 working panel as a validation, the mean square error of subsidence value fitting is reduced from 248 mm to 122 mm, and the mean square error of horizontal movement is reduced from 397 mm to 386 mm. The slip subsidence ΔW and slip horizontal movement ΔU are calculated by using the predictive parameters obtained from the parameters inversion, and the slip fitting values are compared with the predicted value of probability integral method and the measured value. The mean square error of subsidence further decreased from 122 mm to 71 mm, and the mean square error of horizontal movement decreased from 386 mm to 276 mm. Compared with the existing model, the mean square error of subsidence further decreased from 110 mm to 71 mm, and the mean square error of horizontal movement decreased from 343 mm to 276 mm. It shows again the practicability of the mining subsidence prediction model considering slope slip in mountainous areas. The proposed model can help with the comprehensive understanding of the surface movement in mountainous mining areas and evaluate geological hazards so that prevention and control of geological disasters can be taken further.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}