
Multi-Depot Electric Bus Scheduling Considering Operational Constraint and Partial Charging: A Case Study in Shenzhen, China


Abstract
:1. Introduction
2. Literature Review
2.1. E-bus Scheduling Problem
2.2. Application of LNS in Solving EVSP and EVRP
3. Mathematical Formulation
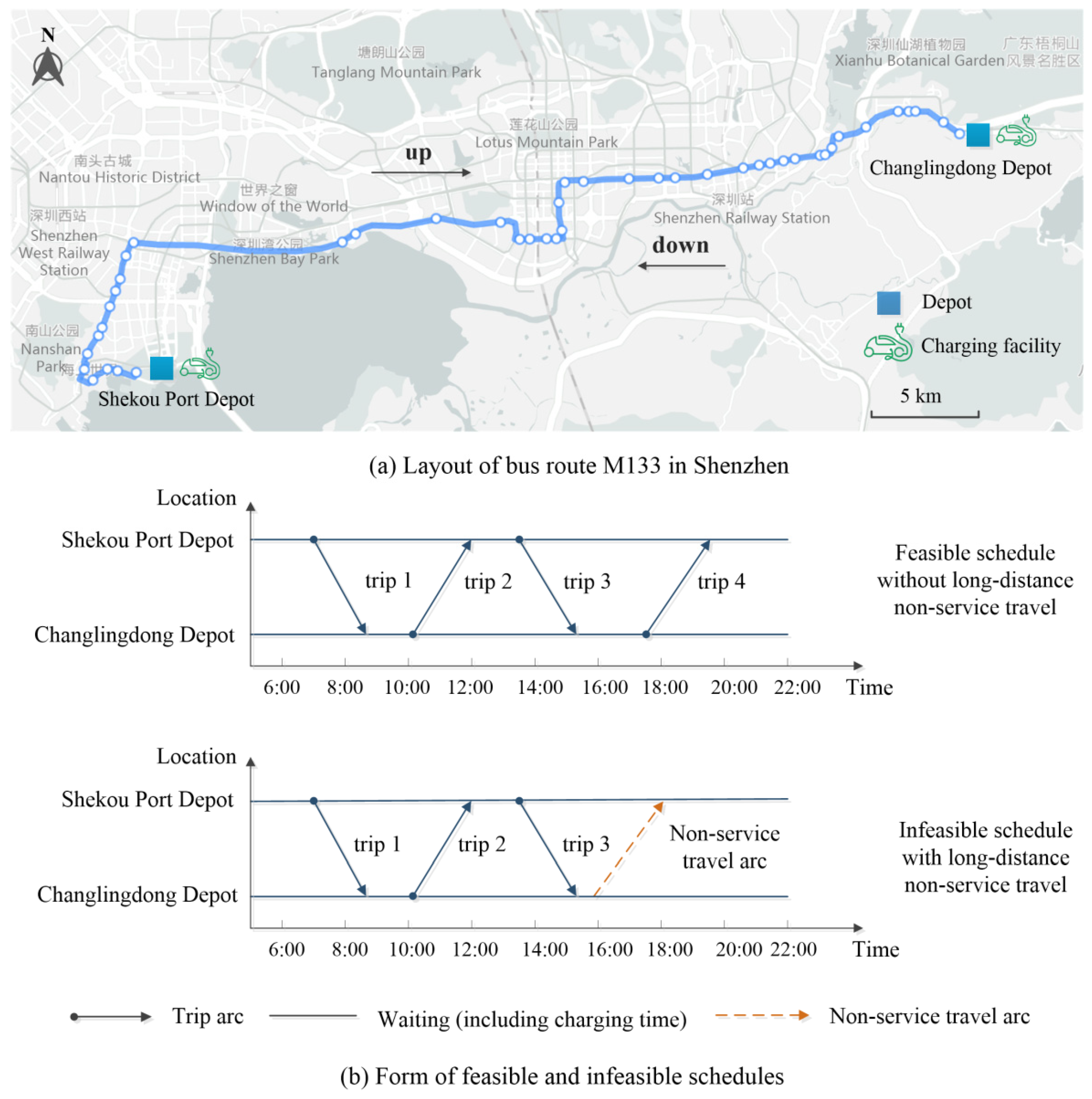
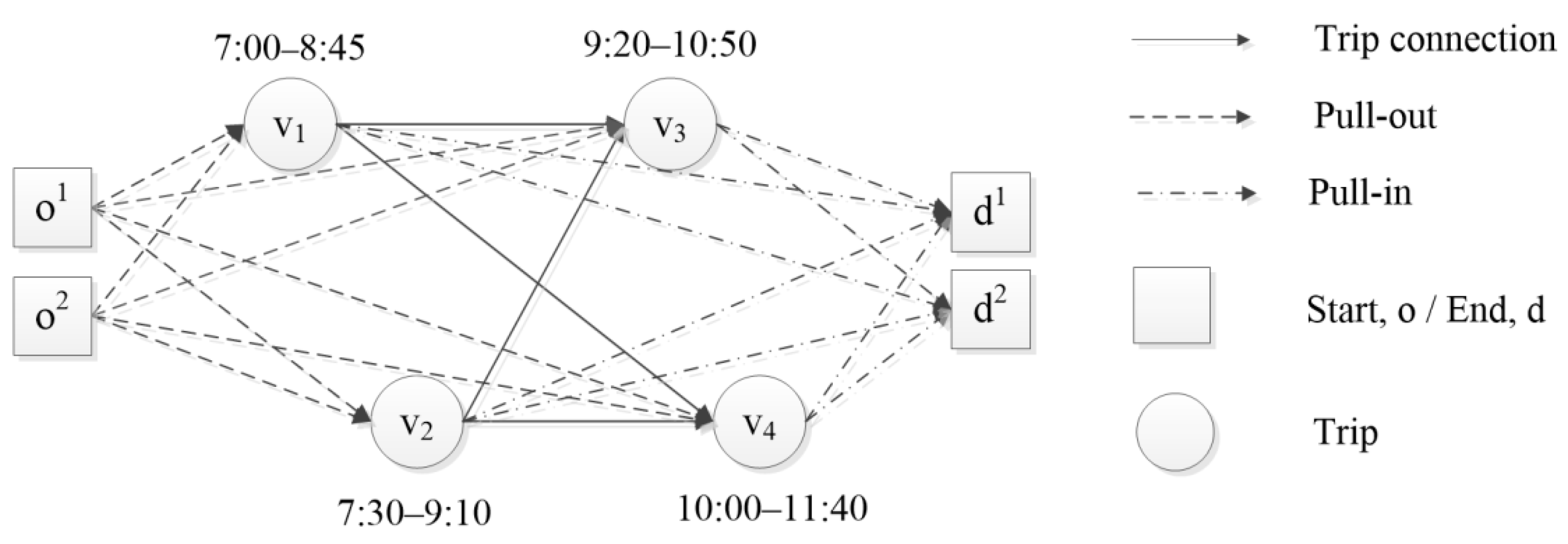
3.1. Problem Description
3.2. MIP Model
4. Large Neighborhood Search Heuristic
4.1. Heuristic Framework
| Algorithm 1 Large Neighborhood Search | |
| 1 | Input a set of trips |
| 2 | Generate an initial solution by Algorithm 2 |
| 3 | Initialization:; ; ;; |
| 4 | Repeat |
| 5 | If diversification criterion satisfied |
| 6 | diversify () |
| 7 | Schedule Destroy and Repair () |
| 8 | Local Search () |
| 9 | Ifaccept () |
| 10 | |
| 11 | If |
| 12 | |
| 13 | |
| 14 | |
| 15 | |
| 16 | Until |
| 17 | Return |
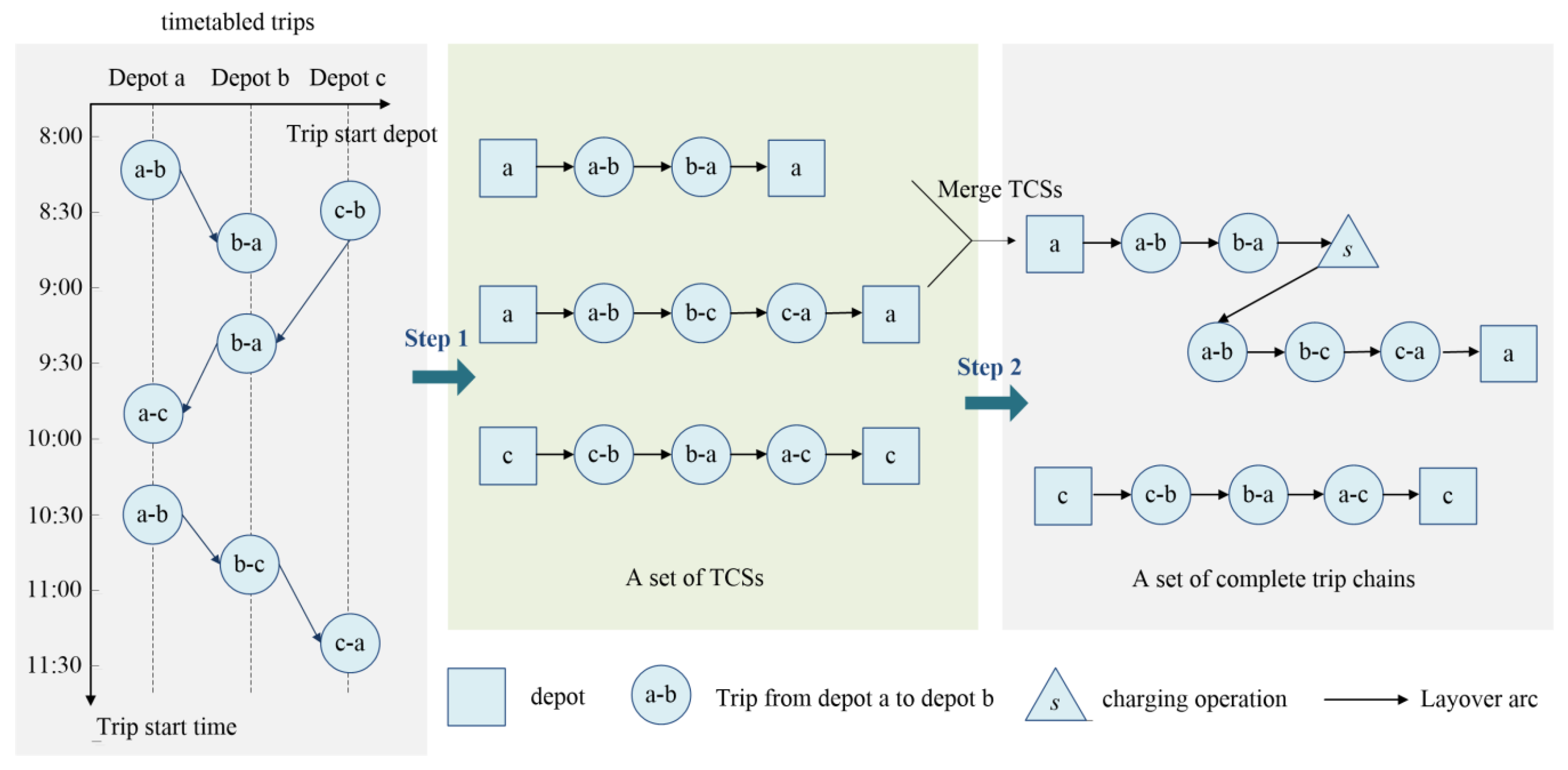
4.2. Solution Formulation Heuristic
| Algorithm 2 Schedule Formulation |
| Input: A set of trips Output: A complete schedule Step 1: Formulate a set of TCSs by Algorithm 3 Step 2: Merge the trip chain segments by Algorithm 6 |
| Algorithm 4 TCS Formulation with Unassigned Trips |
| Input: Set of trips ; set of trip chain segments Output: Set of trip chain segments  Until |
| Algorithm 5K-regret Insertion TCS Formulation |
| Input: Set of trips Output: Set of TCSs and set of unassigned trips Initialize set  Remove all TCSs with vehicle relocation and add the trips of into set ; |
| Algorithm 6 Merge Trip Chain Segments |
| Input: A set of TCSs Output: Set of merged trip chain segments  Until no feasible merge exists |
| Algorithm 7 Merge One Trip Chain Segment |
| Input: Trip chain and set of trip chains Output: Merged trip chain ;  |
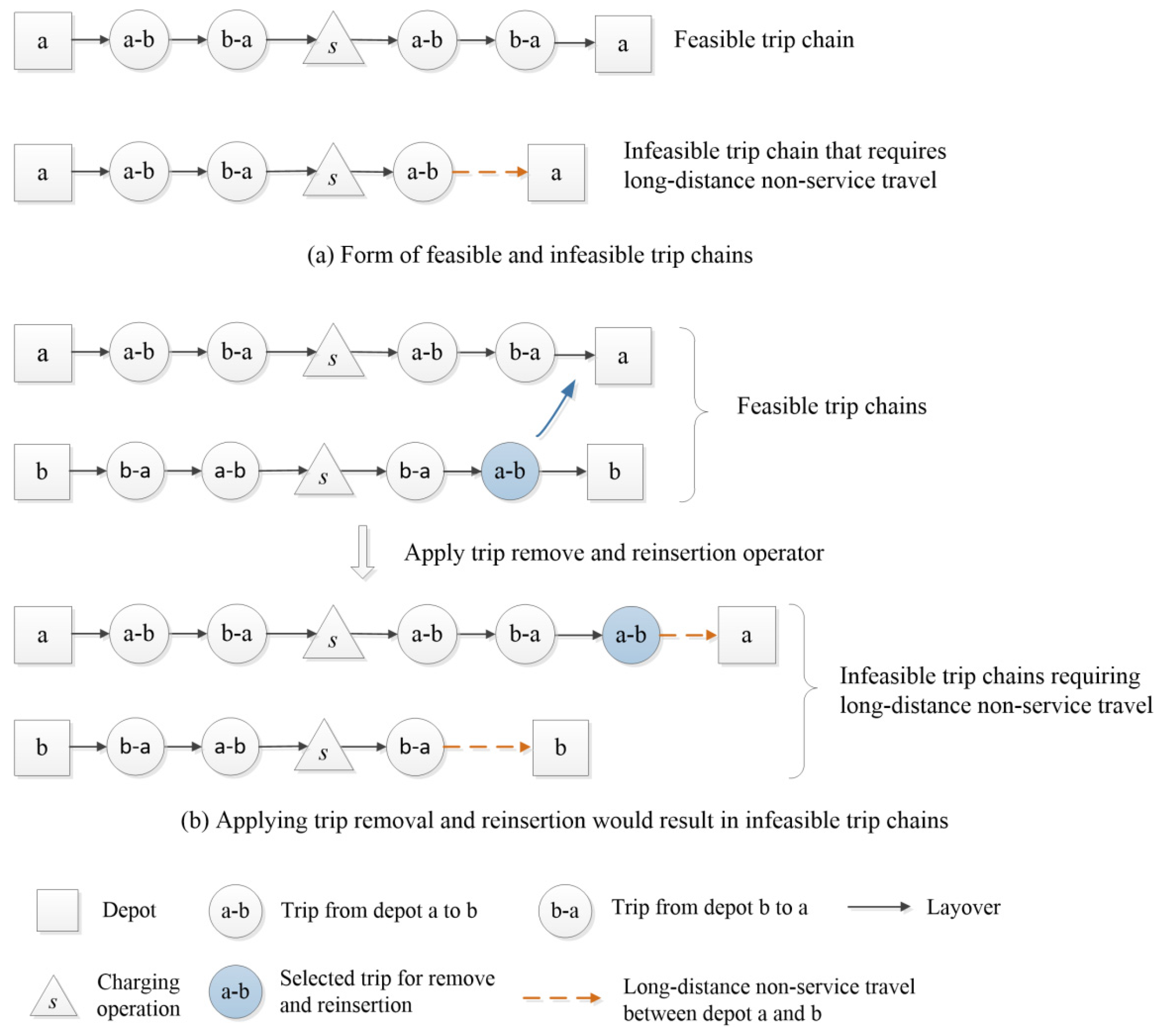
4.3. Neighborhood Solution Generation
| Schedule Destroy Repair Procedure |
|
4.4. Local Search
5. Numerical Experiments
5.1. Data Preperation
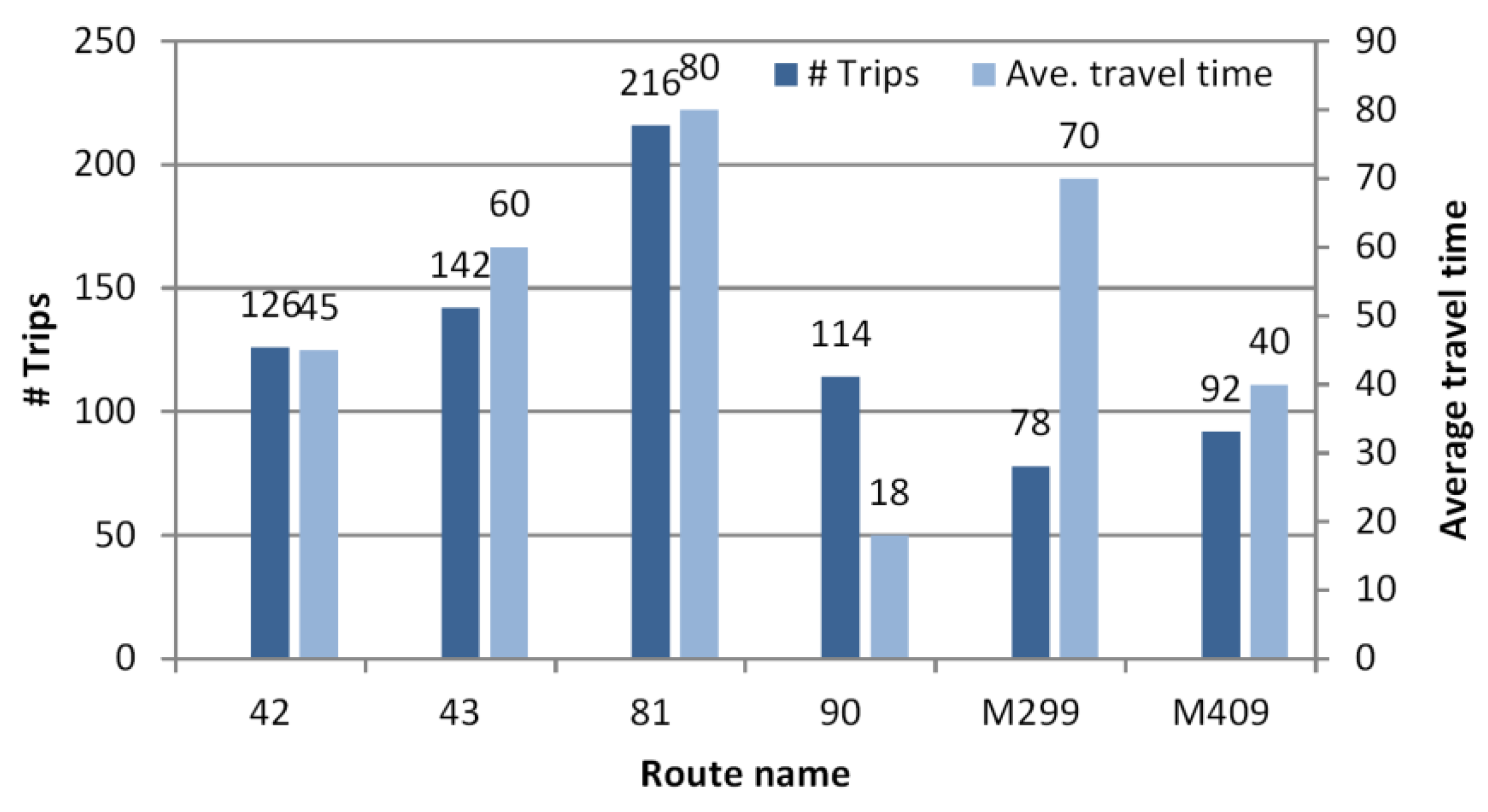
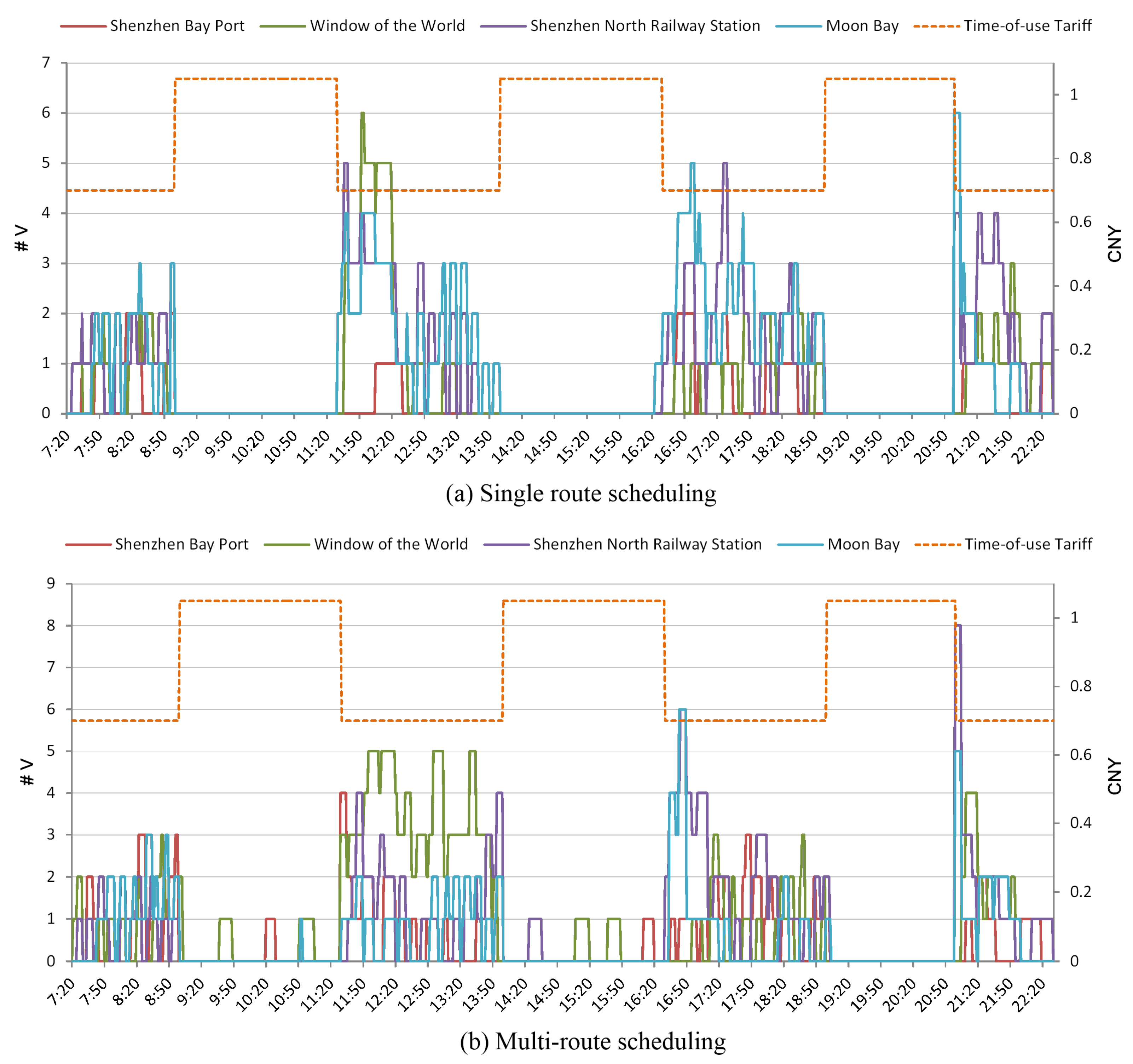
5.2. Cases with Single Route
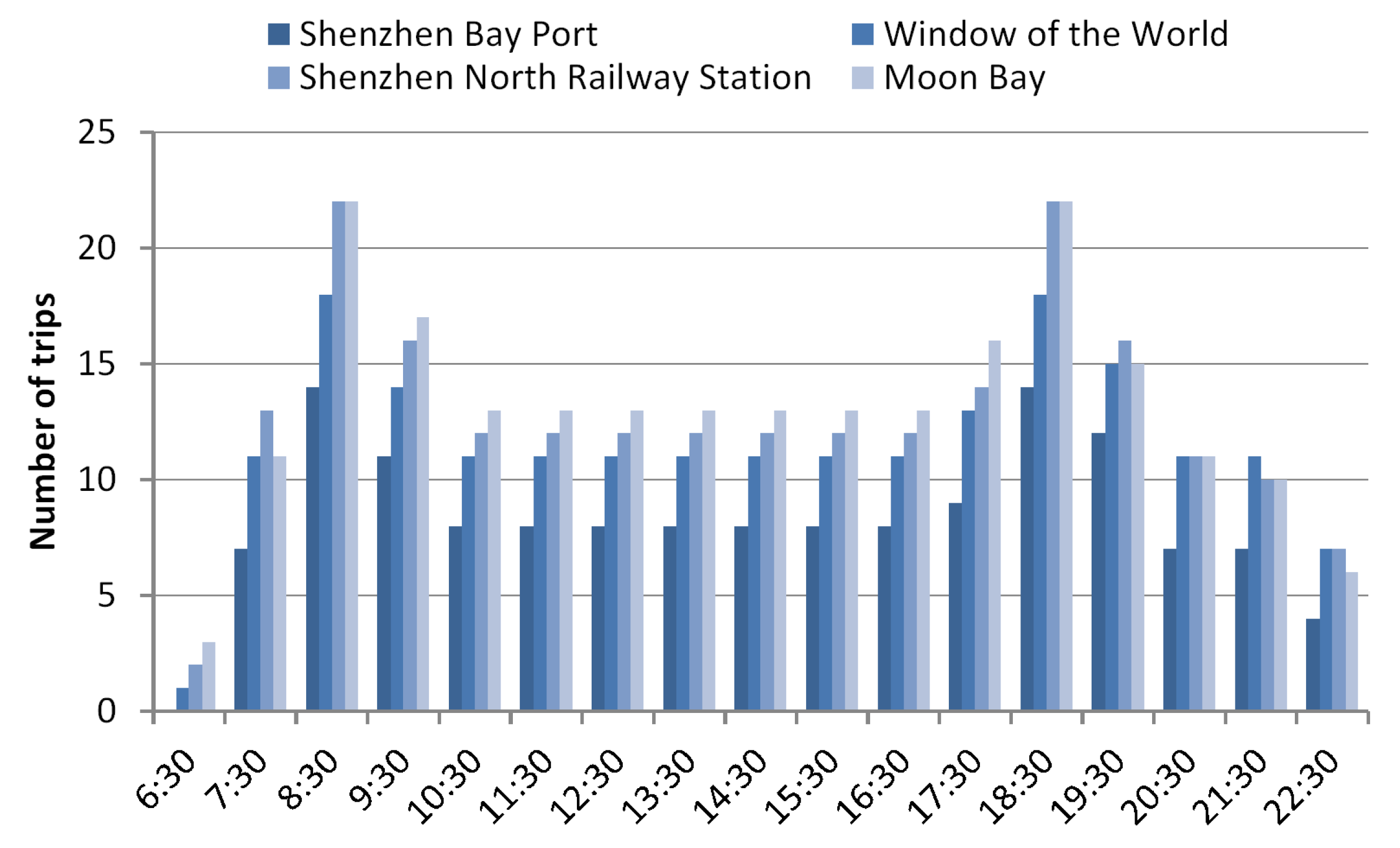
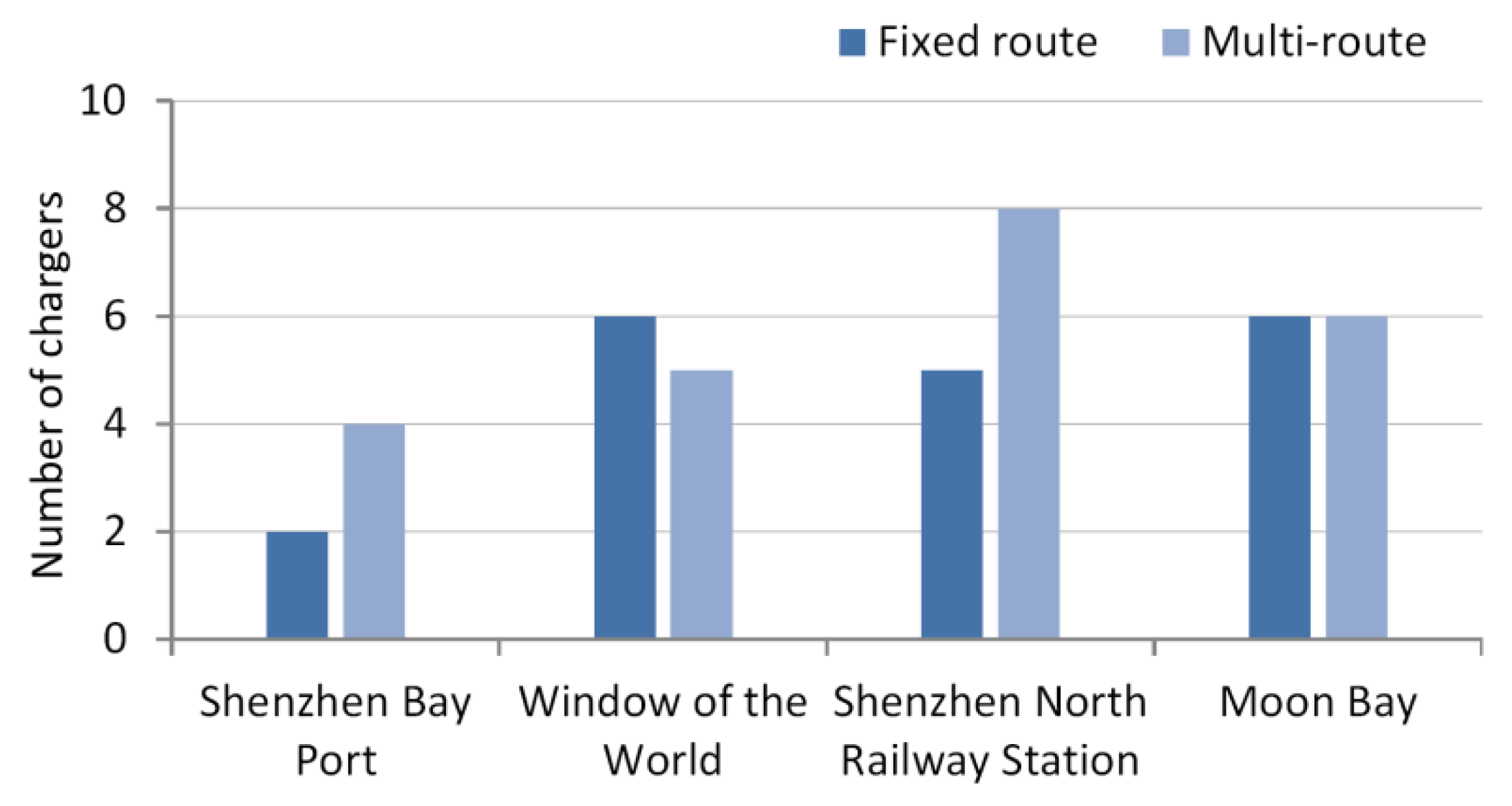
5.3. Cases with Multiple Routes
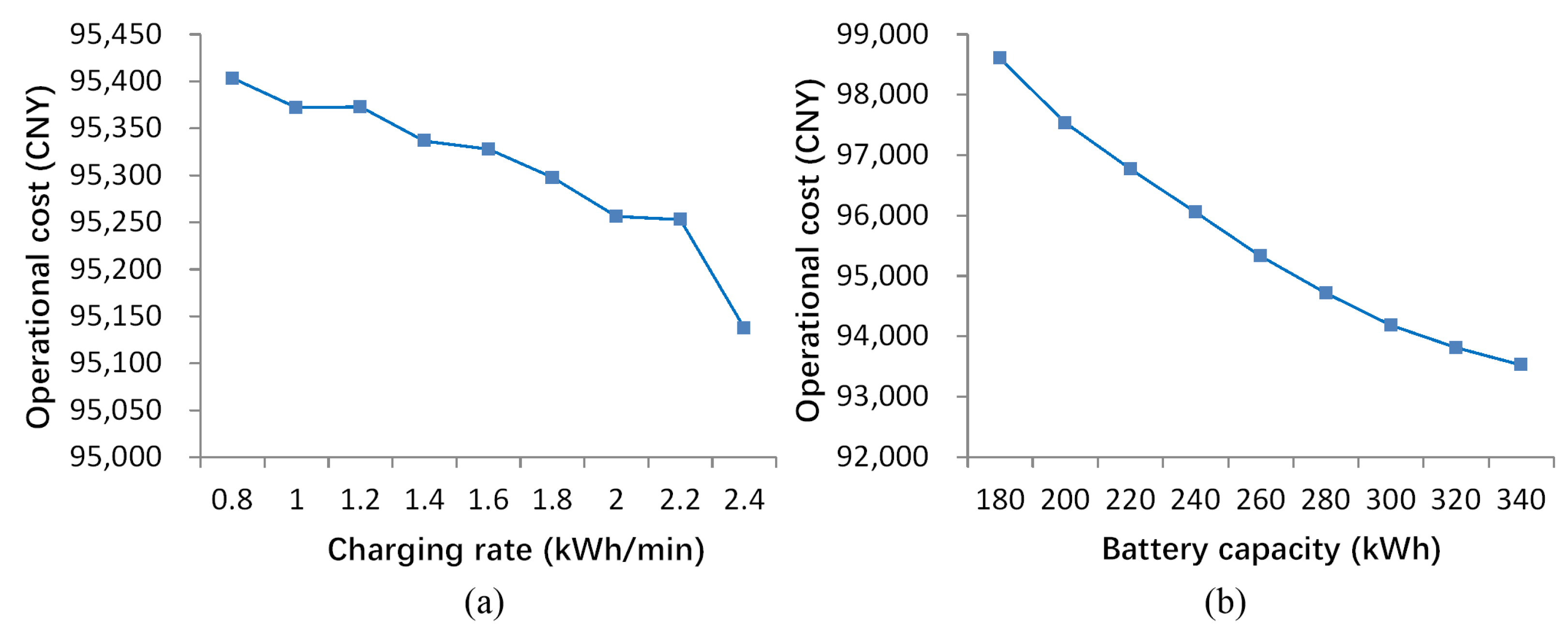
5.4. Sensitivity Analysis
6. Conclusions
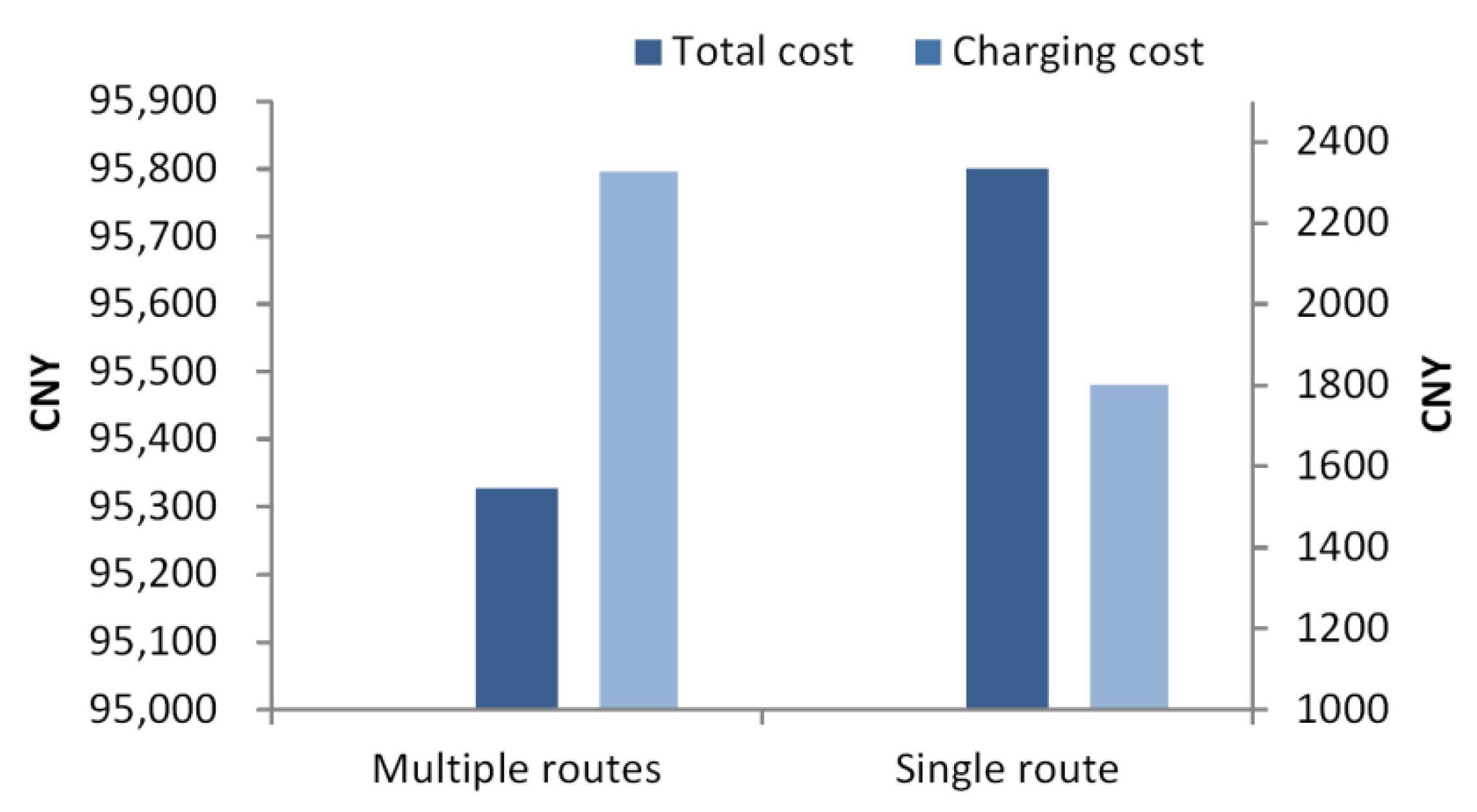
- Compared with single-route operation mode, multi-route operation mode can save the number of vehicles utilized at the expense of a higher charging cost. As such, the optimal schedule with the lowest total operational cost requires a balance between the vehicle usage cost and charging cost.
- Equipping enough charging facilities at bus depots is critical in maintaining high operation efficiency of the e-buses.
- With a certain number of scheduled trips, increasing the battery capacity can reduce the operational cost; however, the effect of the reduction tends to decrease. Increasing the charging rate can reduce the operational cost.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lu, L.; Xue, L.; Zhou, W. How Did Shenzhen, China Build World’s Largest Electric Bus Fleet? 2020. Available online: https://www.wri.org/insights/how-did-shenzhen-china-build-worlds-largest-electric-bus-fleet (accessed on 18 November 2021).
- Wang, G.; Xie, X.; Zhang, F.; Liu, Y.; Zhang, D. Data-driven real-time charging scheduling for large-scale electric bus fleets. In Proceedings of the 2018 39th IEEE Real-Time Systems Symposium, Nashville, TN, USA, 11–14 December 2018. [Google Scholar]
- Bloomberg New Energy Finance (BNEF). Electric Vehicle Outlook 2020. 2020. Available online: https://www.sustainable-buscom/news/electric-vehicle-outlook-2020-bnef-electric-buses (accessed on 24 August 2021).
- Sclar, R.; Gorguinpour, C.; Castellanos, S.; Li, X. Barrier to Adopting Electric Buses; World Resource Institute: Washington, DC, USA, 2019; Available online: https://www.sustainable-bus.com/wp-content/uploads/2019/05/barriers-to-adopting-electric-buses.pdf (accessed on 21 November 2021).
- Soylu, S. Development of PN emission factors for the real world urban driving conditions of a hybrid city bus. Appl. Energy 2015, 138, 488–495. [Google Scholar] [CrossRef]
- Editorial. Electric Bus Range, Focus on Electricity Consumption: A Sum-Up. Sustainable Bus. 20 March 2020. Available online: https://www.sustainable-bus.com/news/electric-bus-range-focus-on-electricity-consumption-a-sum-up/ (accessed on 21 November 2021).
- Wen, M.; Linde, E.; Ropke, S.; Mirchandani, P.; Larsen, A. An adaptive large neighborhood search heuristic for the Electric Vehicle Scheduling Problem. Comput. Oper. Res. 2016, 76, 73–83. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Avi Ceder, A. Battery-electric transit vehicle scheduling with optimal number of stationary chargers. Transp. Res. Part C Emerg. Technol. 2020, 114, 118–139. [Google Scholar] [CrossRef]
- Bertossi, A.; Carraresi, P.; Gallo, G. On some matching problems arising in vehicle scheduling models. Networks 1989, 17, 271–281. [Google Scholar] [CrossRef]
- Häll, C.H.; Ceder, A.A.; Ekström, J.; Quttineh, N. Adjustments of public transit operations planning process for the use of electric buses. J. Intell. Transp. Syst. 2018, 23, 216–230. [Google Scholar] [CrossRef]
- Wang, H.; Shen, J. Heuristic approaches for solving transit vehicle scheduling problem with route and fuelling time constraints. Appl. Math. Comput. 2007, 190, 1237–1249. [Google Scholar] [CrossRef]
- Li, L.; Lo, H.K.; Xiao, F. Mixed bus fleet scheduling under range and refueling constraints. Transp. Res. Part C Emerg. Technol. 2019, 104, 443–462. [Google Scholar] [CrossRef]
- Rinaldi, M.; Picarelli, E.; D’Ariano, A.; Viti, F. Mixed-fleet single-terminal bus scheduling problem: Modelling, solution scheme and potential applications. Omega 2020, 96, 102070. [Google Scholar] [CrossRef]
- Yao, E.; Liu, T.; Lu, T.; Yang, Y. Optimization of electric vehicle scheduling with multiple vehicle types in public transport. Sustain. Cities Soc. 2020, 52, 101862. [Google Scholar] [CrossRef]
- Zhou, G.; Xie, D.; Zhao, X.; Lu, C. Collaborative optimization of vehicle and charging scheduling for a bus fleet mixed with electric and traditional buses. IEEE Access 2020, 8, 8056–8072. [Google Scholar] [CrossRef]
- Lu, T.; Yao, E.; Zhang, Y.; Yang, Y. Joint optimal scheduling for a mixed bus fleet under micro driving conditions. IEEE Trans. Intell. Transp. Syst. 2021, 22, 2464–2475. [Google Scholar] [CrossRef]
- Bie, Y.; Hao, M.; Guo, M. Optimal electric bus scheduling based on the combination of All-Stop and Short-Turning strategies. Sustainability 2021, 13, 1827. [Google Scholar] [CrossRef]
- Teng, J.; Chen, T.; Fan, W.D. Integrated approach to vehicle scheduling and bus timetabling for an electric bus line. J. Transp. Eng. Part A Syst. 2020, 146, 04019073. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, S.; Qu, X. Optimal electric bus fleet scheduling considering battery degradation and non-linear charging profile. Transp. Res. Part E Logist. Transp. Rev. 2021, 154, 102445. [Google Scholar] [CrossRef]
- Tang, X.; Lin, X.; He, F. Robust scheduling strategies of electric buses under stochastic traffic conditions. Transp. Res. Part C Emerg. Technol. 2019, 105, 163–182. [Google Scholar] [CrossRef]
- Bie, Y.; Ji, J.; Wang, X.; Qu, X. Optimization of electric bus scheduling considering stochastic volatilities in trip travel time and energy consumption. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 1530–1548. [Google Scholar] [CrossRef]
- Van Kooten Niekerk, M.E.; van den Akker, J.M.; Hoogeveen, J.A. Scheduling electric vehicles. Public Transp. 2017, 9, 155–176. [Google Scholar] [CrossRef]
- Yıldırım, Ş.; Yıldız, B. Electric bus fleet composition and scheduling. Transp. Res. Part C Emerg. Technol. 2021, 129, 103197. [Google Scholar] [CrossRef]
- Janoveca, M.; Kohánia, M. Exact approach to the electric bus fleet scheduling. Transp. Res. Procedia 2019, 40, 1380–1387. [Google Scholar] [CrossRef]
- Li, X.; Wang, T.; Li, L.; Feng, F.; Wang, W.; Cheng, C.; Li, K. Joint optimization of regular charging electric bus transit network schedule and stationary charger deployment considering partial charging policy and Time-of-Use electricity prices. J. Adv. Transp. 2020, 2020, 8863905. [Google Scholar] [CrossRef]
- Shaw, P. Using constraint programming and local search methods to solve vehicle routing problems. In Proceedings of the 4th International Conference on Principles and Practice of Constraint Programming, Pisa, Italy, 26–30 October 1998; pp. 417–431. [Google Scholar]
- Perumal, S.S.G.; Dollevoet, T.; Huisman, D.; Lusby, R.M.; Larsen, J.; Riis, M. Solution approaches for integrated vehicle and crew scheduling with electric buses. Comput. Oper. Res. 2021, 132, 105268. [Google Scholar] [CrossRef]
- Zhang, A.; Li, T.; Tu, R.; Dong, C.; Chen, H.; Gao, J.; Liu, Y. The effect of nonlinear charging function and line change constraints on electric bus scheduling. Promet Traffic Transp. 2021, 33, 527–538. [Google Scholar] [CrossRef]
- Koç, Ç.; Jabali, O.; Mendoza, J.E.; Laporte, G. The electric vehicle routing problem with shared charging stations. Int. Trans. Oper. Res. 2019, 26, 1211–1243. [Google Scholar] [CrossRef]
- Keskin, M.; Çatay, B. Partial recharge strategies for the electric vehicle routing problem with time windows. Transp. Res. Part C Emerg. Technol. 2016, 65, 111–127. [Google Scholar] [CrossRef]
- Macrina, G.; Laporte, G.; Guerriero, F.; Di Puglia Pugliese, L. An energy-efficient green-vehicle routing problem with mixed vehicle fleet, partial battery recharging and time windows. Eur. J. Oper. Res. 2019, 276, 971–982. [Google Scholar] [CrossRef]
- Macrina, G.; Di Puglia Pugliese, L.; Guerriero, F.; Laporte, G. The green mixed fleet vehicle routing problem with partial battery recharging and time windows. Comput. Oper. Res. 2019, 101, 183–199. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sets | |
| Set of trip nodes | |
| Set of nodes | |
| Set of arcs | |
| Parameters | |
| Battery capacity of the e-bus | |
| Earliest operation start time | |
| Latest operation end time | |
| Charging preparation time | |
| Buffer time between two successive trips | |
| Energy charging rate | |
| Energy consumption rate | |
| Upper bound of the vehicle battery SoC | |
| Lower bound of the vehicle battery SoC | |
| Variables | |
| , and 0 otherwise | |
| is the lowest battery SoC of the vehicle at the operation start (end) time. | |
| Start | End | Price (RMB/kWh) |
|---|---|---|
| 6:00 | 6:59 | 0.26 |
| 7:00 | 8:59 | 0.70 |
| 9:00 | 11:29 | 1.05 |
| 11:30 | 13:59 | 0.70 |
| 14:00 | 16:29 | 1.05 |
| 16:30 | 18:59 | 0.70 |
| 19:00 | 20:59 | 1.05 |
| 21:00 | 22:59 | 0.70 |
| 23:00 | 23:59 | 0.26 |
| Para. | Value | Para. | Value | Para. | Value |
|---|---|---|---|---|---|
| 3000 | α | 0.2 | Nd | ||
| 100 | p1 | 0.4 | β | 0.3 | |
| 1 | p2 | 0.9 |
| Route | #Trips | #V | Obj | Run time (s) | Gap (%) | ||||
|---|---|---|---|---|---|---|---|---|---|
| MIP | LNS | MIP | LNS | MIP | LNS | MIP | LNS | ||
| M299 | 78 | 12 | 12 | 12,132.1 | 12,130.5 | 3600 | 35.2 | 1.09 | – 0.01 |
| M409 | 92 | 8 | 8 | 8127.1 | 8128.4 | 3600 | 52.0 | 1.56 | 0.02 |
| 90 | 114 | 6 | 6 | 6000.0 | 6000.0 | 3600 | 69.5 | 0.00 | 0.00 |
| 42 | 136 | 14 | 14 | 14,327.2 | 14,315.8 | 3600 | 116.2 | 2.28 | – 0.08 |
| 43 | 142 | 16 | 16 | 16,581.1 | 16,562.0 | 3600 | 92.7 | 3.50 | – 0.12 |
| 81 | 216 | 38 | 38 | (38,000) | 38,659.9 | 3600 | 193.6 | — | — |
| Scenarios | #V | Obj. | Charging Cost | Run time (s) |
|---|---|---|---|---|
| Scenario I (All depots charging available) | 93 | 95,328 | 2327.7 | 3545.3 |
| Scenario II (Moon Bay charging unavailable) | 98 | 100,413 | 2412.8 | 4096.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, M.; Zhang, Y.; Zhang, Y. Multi-Depot Electric Bus Scheduling Considering Operational Constraint and Partial Charging: A Case Study in Shenzhen, China. Sustainability 2022, 14, 255. https://doi.org/10.3390/su14010255
Jiang M, Zhang Y, Zhang Y. Multi-Depot Electric Bus Scheduling Considering Operational Constraint and Partial Charging: A Case Study in Shenzhen, China. Sustainability. 2022; 14(1):255. https://doi.org/10.3390/su14010255
Chicago/Turabian StyleJiang, Mengyan, Yi Zhang, and Yi Zhang. 2022. "Multi-Depot Electric Bus Scheduling Considering Operational Constraint and Partial Charging: A Case Study in Shenzhen, China" Sustainability 14, no. 1: 255. https://doi.org/10.3390/su14010255