1. Introduction
Today, cities are growing faster than in the past in terms of population, congestion, and land use. Cities are experiencing challenges like worsening traffic congestion, increasing travel time, road accidents, insufficient public service, increasing pollution, etc. An optimally designed transit network is a crucial part of every urban transportation system that can help address many of these challenges. Transit is an effective service for supporting sustainable urban development. It also provides mobility options to transportation-disadvantaged populations not well served by other transportation options. Indeed, prioritizing transit is considered a strategy of urban development. However, while the transit network can have significant impacts on providing services to users and addressing urban transportation problems, services are costly to provide, and transit agencies have limited budgets. Transit agencies are tasked with attempting to satisfy multiple competing goals with a budget constraint. The Transit Network Design Problem (TNDP) model attempts to design an optimal transit network, given the constraints, that addresses many of the urban transportation problems while providing useful services to travelers and commuters. Several solutions have been addressed to solve the TNDP model.
The transit network consists of several connected routes, nodes, stations, and paths. Indeed, the TNDP is designed to consider multiple objectives including maximizing the number of travelers in the network [
1,
2], service coverage [
3,
4], demand density of the route including direct trips, one transfer, and two transfers [
5], while also considering social and spatial equities [
6]. It could also include objectives for minimizing total travel time, unsatisfied demand, total route length, the total number of routes taken by passengers, the total number of transfers, total user and operator cost, and total waiting time. The model includes natural constraints such as route length, number of stations, the distance between stations, bus frequency, the fleet size of vehicles, bus route, and travel demand in nature with different aspects of users and operators (see
Table A1 in
Appendix A).
The TNDP is intended to find a series of routes for metropolitan public transport networks that optimize riders’ and operators’ competing goals with their respective frequencies. The key problem is the road network data and demand between various points of the cities. Constraints are typically linked to demand fulfillment, service level, and the availability of services, although additional constraints can occur. Frequencies are used in the optimization models of the transportation network, as they also have a significant effect on riders’ and operators’ cost structure.
Transportation planning is embodied by five processes, including network design, frequency setting, timetable development, bus schedules, and driver scheduling [
7]. In this study, the first two processes, network design and frequency setting, are addressed.
Figure 1 displays these five plans in a schematic view. In another viewpoint, transportation planning can be divided into strategic planning (network design), tactical planning (frequency setting, timetable), and operational planning (bus scheduling and driver scheduling) [
8]. The network design and frequency setting are components of long-term planning, which aims to create a balance between different objective functions such as minimizing passenger and operator costs [
9].
The initial stage for each urban transit system is the strategic planning problems. Indeed, it determines the network layouts and some operational features. The goal is to optimize service quality within budget limits or to keep the cost for operators and users as low as possible [
8]. Transferring transit design to a transport service requires tactical planning that links passengers with operators. The focus of tactical problems is to decide on public service delivery, in particular service frequencies along routes and timetables that can maximize service quality [
10,
11]. Operational planning addresses the problems of offering the proposed service at the lowest cost. This topic addresses various issues such as the planning and management of rolling stock, driver planning, scheduling of rolling stock, and maintenance. Transit network assessment is a way to receive passenger and operator feedback from the received service. It also shows where operators can improve service. Total transport accessibility, network reliability, and timing stability are part of the assessment for every transit network. Research on marketing strategies such as fare policies, investment strategies, and trade agreements as well as cooperation with other modes of transport is essential to the development of efficient transit systems which enhance their benefit for society and its residents.
Transit research often focuses on larger urban areas, but small urban systems face similar challenges. Further, because of lower population density and more dispersed demand, these systems face additional challenges in providing a high-quality service, without excessive travel times, that attracts riders and meets the needs of the public, while facing budget constraints. Therefore, this research focuses on the transit network in a small urban metropolitan area consisting of the cities of Fargo, North Dakota, and Moorhead, Minnesota, in the Midwest region of the United States.
In this study, a set of transit routes are designed in the existing Fargo-Moorhead Area (FMA) network. The bus route network is designed to improve the existing routes with predetermined bus stops to achieve an efficient transit network, minimizing the total travel time of passengers (user costs) and the number of operating buses (operator costs), while maximizing the service coverage in the network. This study attempts to answer the following questions:
How should the routes be arranged, or bus stops be located in the FMA transit network?
How many transit routes should be considered in the FMA transit network?
How much will the new transit routes decrease travel time and the number of required buses operating?
How much percent service coverage can be achievable?
What would be an optimal number of buses as well as optimum bus headway in each route by proposing the new set of transit routes?
The rest of the paper is organized as follows. The literature review is discussed in
Section 2. In
Section 3, the mathematical model formulation and problem statement is proposed. The solution methodology is presented in
Section 4. In
Section 5, the case study of the existing network of FMA is explained and analyzed. Results of the proposed Non-dominated Sorting Genetic Algorithm II (NSGA-II) solution methodology are provided and discussed in
Section 6. Finally, conclusions and further research directions are presented in
Section 7.
3. Proposed Model
In this study, a MOMINLP model is proposed to find the total travel time of passengers on each route, the round-trip time of each route, the bus headway of each route, the optimal number of required buses, the loading factor of each route, and the length of each generated route in the network.
3.1. Problem Statement
The TNDP model is defined as a network constituted by an undirected graph with a finite number of nodes (N) representing a transportation network and several arcs (R). N is devoted to the set of nodes (bus stations and terminals) and R is the set of existing network arcs (street route/street segment and path) that connects each bus stop to the other. Each element of R corresponds to a pair (i, j) where i is the origin and j is the destination. Each O-D has pair (i, j) and dij is denoted by travel demand between point i and j, and tij is denoted by travel time needed for passengers to move from point i to j. The solution of the TNDP model is a set of transit routes in the network.
T and
D are defined as the set of travel time and passenger trips between the node
i and
j, as follows:
The input data in this study is comprised of various matrices such as the distance matrix, the O-D (demand) matrix, and the travel time matrix. Then, these data are used as input to the model to get solutions consisting of transit routes and frequency settings.
3.2. Mathematical Model
The MOMINLP problem aims to determine the set of transit routes and frequency setting for a public transit system that should be convenient from the viewpoints of both users and operators. The TNDP model generates a set of transit routes and the frequency of each route, which determines the number of buses assigned to each route, to maximize demand served and avoid congestion and longer waiting times. This study has some assumptions, as follows:
The number of transit routes is determined by the planner.
The frequency in each route should be within a range.
Route length should be within a minimum and maximum range.
The fleet size is considered as the budget constraint on each route.
The bus headway is considered as a constraint to avoid longer passenger waiting time.
Moreover, the following criteria are used to produce high-quality transit routes:
The route feasibility check verifies that no repeated vertices are displayed on a route, that each route is feasible.
If a route is identical to one segment or an entire route, then this route will be considered non-unique. So, this route will be removed directly.
The network connectivity check determines if a route is linked to the public transit system.
The area coverage check verifies that all vertices are shown in a set solution at least once. This process builds a list of appearing vertexes by searching all routes and checking when each vertex is listed.
In this study, the MOMINLP model is proposed to minimize the total travel time of users and the number of buses simultaneously, as well as to maximize the service coverage (potential demands) of generated transit routes in the network. The following sub-sections describe the parameters, variables, and the mathematical model.
3.2.1. Parameters
To build the model, the following parameters are used:
: Total passenger demand on the network (persons)
: The minimum length of laid route for the route rm (meters)
: The maximum length of laid route for the route rm (meters)
: The minimum space of station between two nearby stations of i and j (meters)
: The maximum space of station between two nearby stations of i and j (meters)
: The penalty coefficient reflecting the importance of each term of first objective functions including the user costs and operator costs
: The minimum bus headway required for each route (minutes)
: The maximum bus headway required for each route (minutes)
: The maximum bus fleet size on the existing network (buses)
: The maximum number of transit routes in the network
: The value of unmet demand ($/person)
: The value of time ($/minute)
: The operating hours for the bus running on any route (minutes)
: The maximum load factor for any route in the network (per bus)
: Seating capacity of each operating bus (persons)
3.2.2. Variables
Variables are defined as follows:
: The total travel time between stops i and stop j on route rm
: Total passenger demand between stop i and stop j along route rm
: The round-trip time of route rm (minutes)
: The bus headway operating on route rm (minutes)
: The length of route rm
: The distance between the stop i and stop j on the network
: The number of routes of the newly designed transit network
: The number of operating buses required on route rm
: The load factor of route rm
: The maximum flow on route rm
3.2.3. Objective Functions
From the mathematical point of view, the MOMINLP model can be expressed as follows:
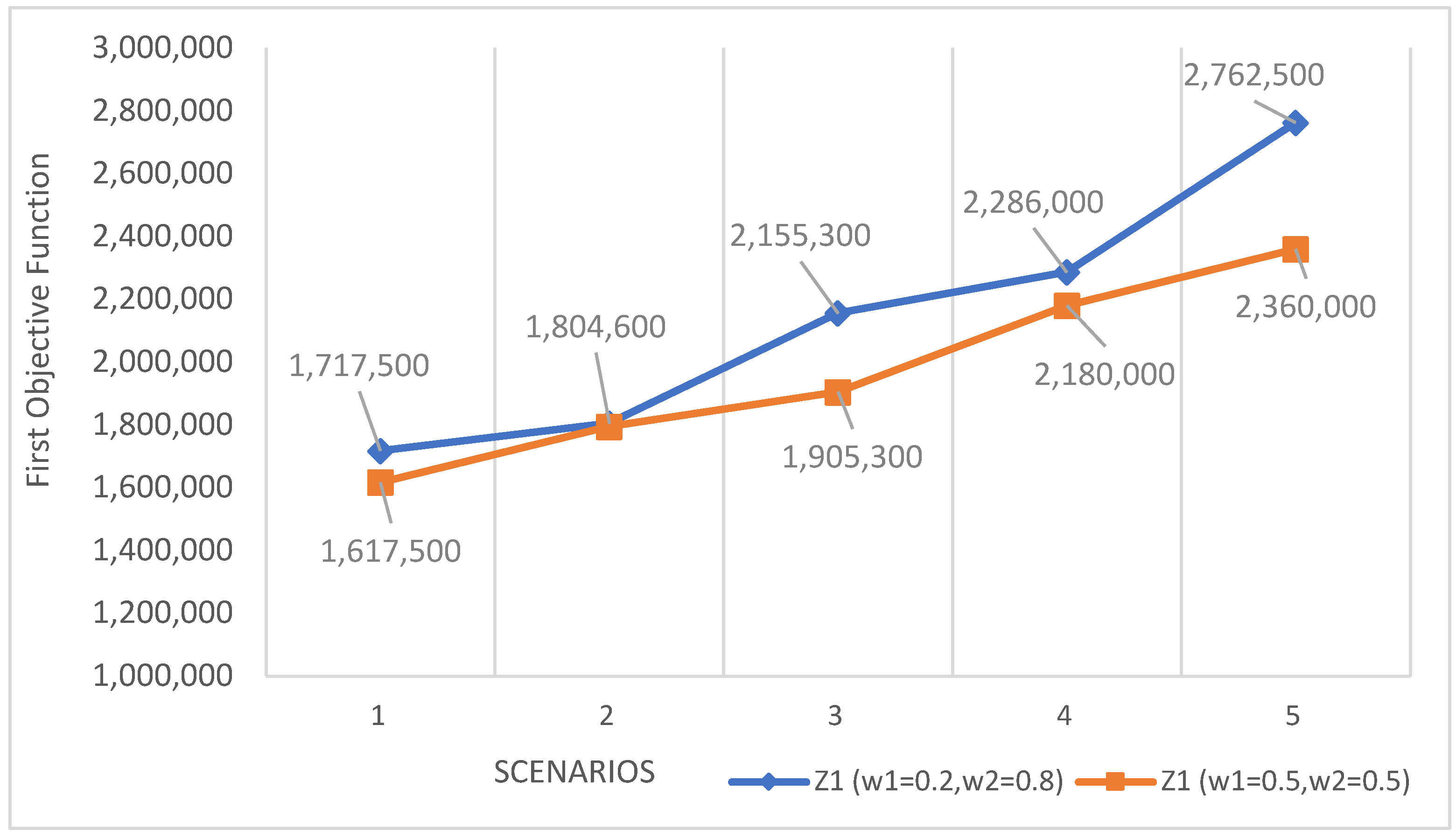
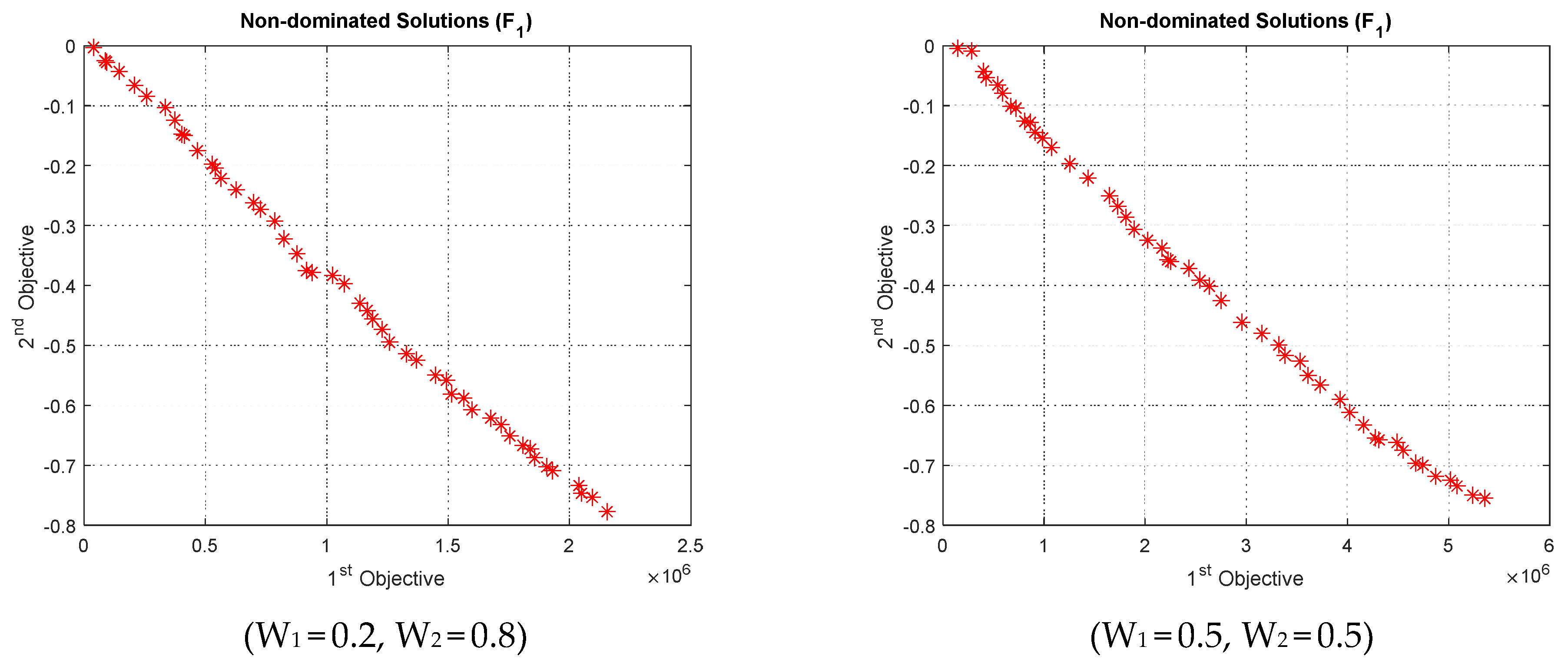
The first objective function shown by Equation (3) is constituted by two parts including user cost and operator cost. Generally, the user cost consists of four components such as walking time, waiting time, transfer time, and in-vehicle time (i.e., the in-vehicle time required for riding a bus to a destination), and the operator cost is the cost of operating buses. On the other hand, are penalty coefficients of these two parts that refer to the tradeoffs between the user costs and the operating costs. These coefficients are determined by decision-makers. Therefore, different rates of these coefficients result in a different set of optimal transit routes.
The second objective function displayed with Equation (4) aims to maximize the service coverage of generated transit routes in the network in terms of demand. Indeed, service coverage is referred to the percentage of the total estimated demand that may potentially be met by the public transit system.
3.2.4. Constraints
As discussed in
Section 3.2, there are some assumptions that should be considered. The first is related to the length of the generated transit route. Equation (5) assures that the length of each route must be between a minimum and maximum length, which are determined based on factors such as driver fatigue and difficulty of maintaining the schedule. In other words, this equation prevents the generation of a route that is too long, because scheduling on a very long route can be difficult to be implement. Equation (6) shows that the distance between stop
i and stop
j should be between the minimum and maximum stop spacing distance. The maximum number of route constraints (transit route) in the network is shown by Equation (7).
Another important constraint, as shown in Equation (8), regards the bus headway feasibility in each generated transit route. This constraint provides the minimum and maximum headways. Equation (9) is designed to show the limitation of the available number of buses in the network. Indeed, this equation guarantees that the number of operating buses in an optimal public transit system cannot exceed the available number of buses. Equation (10) is the load factor constraint that assures that the maximum flow on each route cannot exceed the bus capacity on the same route.
Finally, Equation (11) displays the nature of variables that are used in our proposed model that would be integer numbers.
4. The Proposed Solution Methodology
The TNDP model is classified as an NP-Hard problem [
18,
19] and located as a non-convex (even concave) optimization problem [
20]. Due to its hardness and difficulty to solve, researchers have tried to examine it from various viewpoints. As noted in the literature review, many developed heuristics, and meta-heuristic approaches are proposed by researchers to solving the TNDP model (see
Table A1 in
Appendix A).
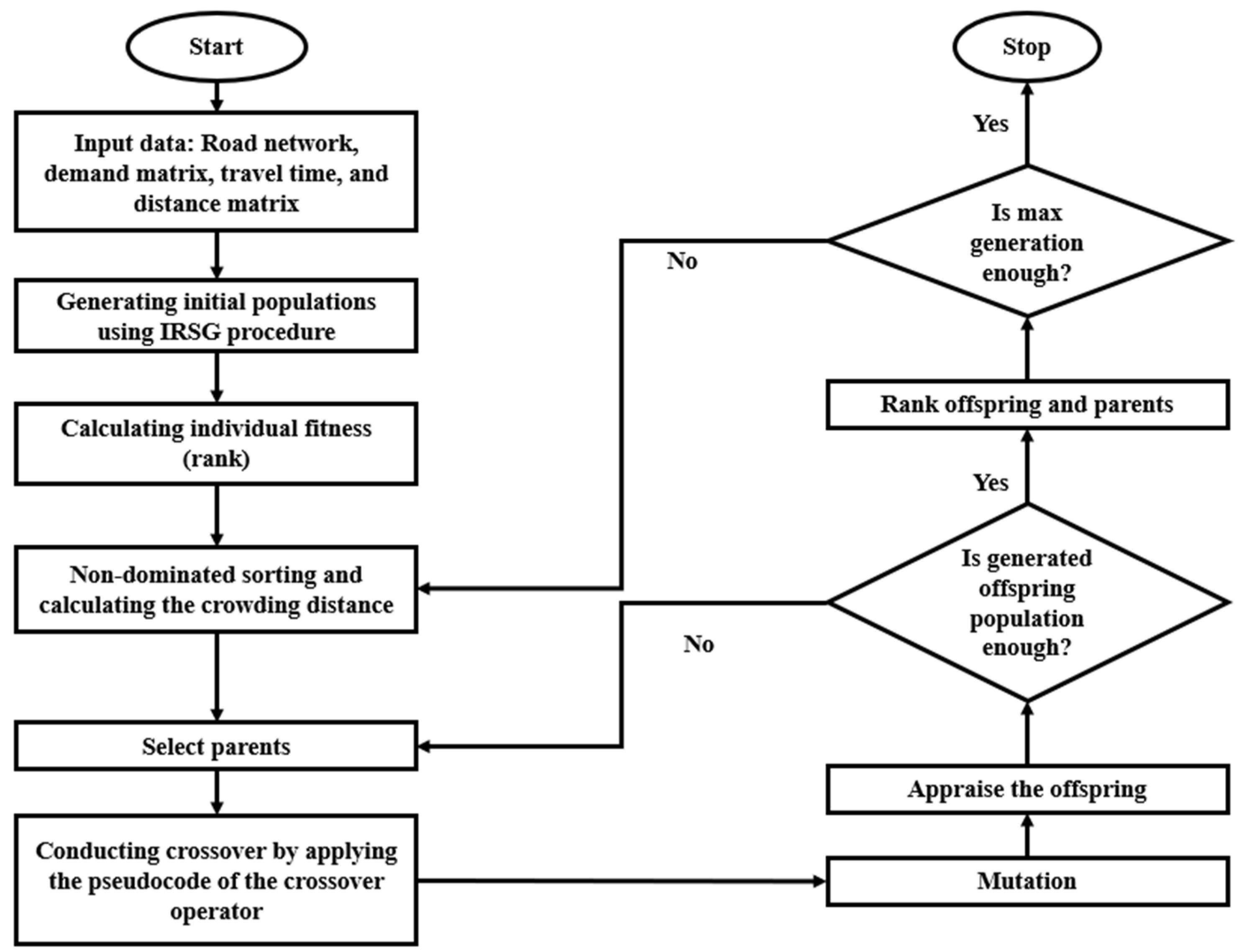
Figure 2 shows the schematic view of the proposed IRSG procedure combined with NSGA-II algorithm in this study.
The extended version of the NSGA, called NSGA-II, is a fast and elitist multi-objective genetic algorithm introduced by Deb et al. [
33]. This algorithm is an evolutionary multi-objective algorithm that improved upon NSGA. It is a population-based algorithm that would do unmistakable sorting to make the compromise between multi-objective functions. These characteristics enable NSGA II, rather than the best solution, to produce a set of non-dominated final solutions. The NSGA II algorithm is widely employed to solve multi-objective optimization problems in engineering and its applications. This algorithm is constructed based on the ranking selection method which is used to emphasize good points as well as the Niche Method to maintain stable sub-populations of generated good points [
34].
4.1. Initial Route Set Generation (IRSG) Procedure
The Initial Route Set Generation (IRSG) procedure is combined with the NSGA-II algorithm to solve the proposed MOMINLP model. It should be noted that the proposed MOMINLP model in
Section 3 is a non-linear model that needs to be solved by appropriate heuristic and meta-heuristic approaches [
35,
36,
37]. Thus, the NSGA-II algorithm can be used to find promising, near-optimal solutions for the proposed MOMINLP model. Some studies have pointed out the robustness of the NSGA-II algorithm to pursue the distinguished benchmark problems without changing the value of algorithmic parameters [
38,
39].
In this study, each route is shown by an individual which is known as a transit route set from the given road network while each bus stop is shown by gen. Indeed, the IRSG algorithm presented here is based on a greedy algorithm that is a modification of Nikolić and Teodorović’s [
36] initialization procedure.
Before presenting the proposed IRSG algorithm, a set of feasible transit routes needs to be produced in a way that does not require too much computational time and can lead to finding the best result. This would allow for the generation of a set of valid transit routes based on input data matrices, such as the distance matrix, the demand matrix, and the travel time matrix. The distance matrix is calculated and defined as the distance between each pair of the network. The demand matrix is the number of trips per time for each pair of nodes. The travel time matrix is calculated by the demand matrix toolbox of ArcGIS Pro 2.4.2 that shows the total travel time between each pair of nodes in the network. The proposed IRSG algorithm procedure starts with generating the initial route by an origin-destination matrix which is calculated by the demand matrix and the number of required transit routes. Next, bus stops are added into the initial route, considering constraints previously discussed. This is repeated until all required bus stops are added into the generated origin-destination terminal to complete the transit route generation. Algorithm 1 shows the pseudo-code of the proposed IRSG algorithm procedure in detail.
| Algorithm 1. The pseudocode of IRSG algorithm. |
| 1: Input: Distance matrix (Distance), Origin-destination matrix (Origin-Destination), Minimum distance between two nodes (Min Distance Nodes), and Maximum distance between two nodes (Max Distance Nodes) |
| 2: Output: Valid chromosome (Initial Transit Routes) |
| 3: Initial Route = [Origin Destination Origin Destination] |
| 4: While true |
| 5: Bus Stop = Initial Route (size (Initial Route)) |
| 6: Valid Distance = Find ((Distance (Bus Stop) > Min Distance Nodes) & (Distance (Bus Stop) < Max Distance Nodes)) |
| 7: If size (Valid Distance) > 0 & all (is member (Valid Distance, Initial Route)) |
| 8: Next Stop Status = True |
| 9: While Next Stop Status |
| 10: If size (Valid Distance) = 0 |
| 11: break |
| 12: End |
| 13: Next Stop Index = Randi (1 size (Valid Distance)) |
| 14: Next Stop = Valid Distance (Next Stop Index) |
| 15: If is empty (Find (Initial Route = Next Stop)) |
| 16: Next Stop Status = False |
| 17: Initial Route = [Initial Route (end − 1) Next Stop Initial Route(end)] |
| 18: Else |
| 19: Valid Distance (Next Stop Index) = [] |
| 20: End |
| 21: End |
| 22: Else |
| 23: Valid Chromosome = Initial Route |
| 24: break |
| 25: End |
| 26: If size (Initial Route) = Length Route |
| 27: Valid Chromosome = Initial Route |
| 28: Break |
| 29: End |
| 30: End |
4.2. Fitness Evaluation
After proposing the IRSG procedure for generating the transit route, the next step is to compute the fitness of each generated chromosome. In the NSGA-II algorithm, the fitness is calculated based on three factors including non-domination rank, crowding distance, and crowding comparison. These factors are calculated as follows:
- 1.
Fast non-dominated sort: the individual is the non-dominated solution if an individual objective function is not worse than the others. In the iterative process, every individual in non-inferior relationships is assigned to several fronts. Every individual is defined by a rank value of .
- 2.
Crowding distance: The average distance between two individuals must be measured to assess the distribution density of other individuals, which is known as the crowding distance. The distance is assigned for two boundary individuals to infinity and then distances are determined for other individuals through Equation (12).
where,
is the crowding distance of the
kth objective function of the ith individual.
and
are the
kth objective function values of the (
i + 1) th and the (
i − 1) th individuals, respectively.
and
are the maximum and minimum values of the
kth objective function of the
ith individual.
- 3.
Crowded comparison: if the ranks and are identical for two individuals i and j, the crowding distances of and should be compared. Then, if or . but , the ith individual is higher compared to the jth individual.
4.3. Tournament Selection
Before applying the genetic operation, the tournament selection should be performed. First, both parents are given the same chance to be selected. Second, parents Si and Sk are chosen randomly and the parent who has the higher fitness value is selected. Finally, the second parent will be produced by repeating the process.
4.4. Modification Operators
The modification operators of the NSGA-II algorithm are employed to generate better solutions. The first operator is the crossover operator that ensures the exchange of genetic material between parents and creates chromosomes that are more likely better than the parents. Indeed, each gene is treated as a bus stop and by swapping genes of the chromosomes (transit route), the crossover of two-parent strings produces offspring as new solutions [
40,
41].
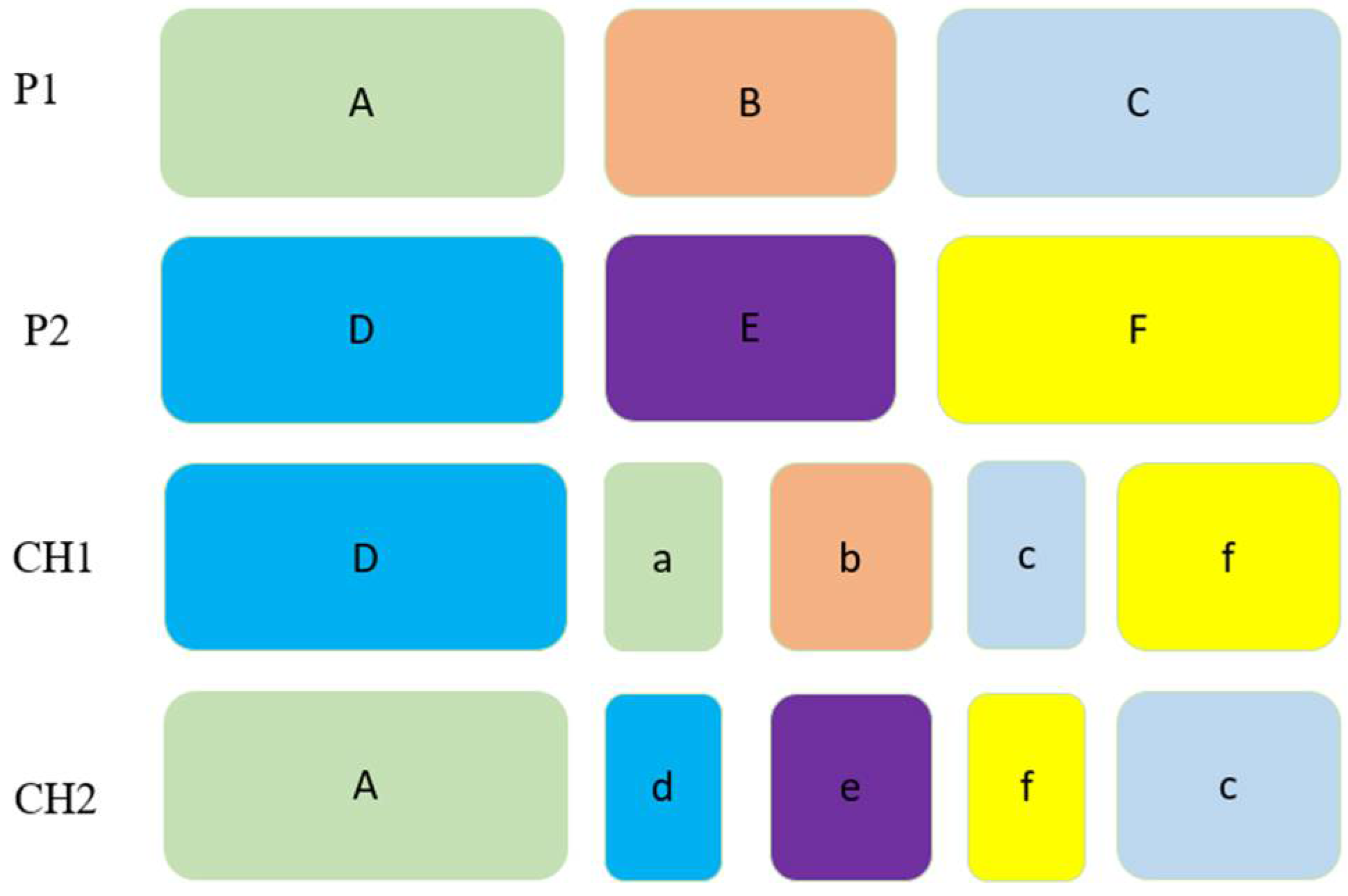
The crossover operator considered in this paper is schematically shown in
Figure 3. Two parents P1 and P2 are chosen to be crossed to produce two children CH1 and CH2. The P1 and P2 are constituted by three parts of A, B, C and D, E, F. For building the first part of CH1, the first part of P2 (D) are copied. Then, for generating other parts of CH1 such as a, b, and c, these are obtained from the A, B, and C of P1. On the other hand, some elements that have already been added from P2 cannot be included again. This process is called nonrepetitive elements which avoid selecting the repeated elements into the CH1 and CH2. Finally, element f is selected from the set of F in P2. The same procedure is repeated to generate CH2. What is clear from
Figure 3 is that the priority of generated new chromosomes by CH1 and CH2 are preserved by applying the proposed crossover operator. So, by doing this, the procedure generates feasible children’s solutions to the problem.
Algorithm 2 shows the pseudocode of the crossover operator which is proposed in this study, and it is written in MATLAB software 2021.
| Algorithm 2. Pseudocode of Crossover operator. |
| 1: If Crossover Type = 2, |
| 2: Feasibility_CH1 = 0 |
| 3: Feasibility_CH2 = 0 |
| 4: While Feasibility_CH1 + Feasibility_CH2 ~= 2 |
| 5: C1, C2 = Creates two random numbers |
| 6: CH1 = [P1 (1: C1) P2 (C1 + 1: C2 − 1) P1 (C2: end)] |
| 7: CH2 = [P2 (1: C1) P1 (C1 + 1: C2 − 1) P2 (C2: end)] |
| 8: If CH1 is not Feasible |
| 9: Sub-tour elimination of CH1 |
| 10: Feasibility_CH1 = 1 |
| 11: End |
| 12: If CH2 is not Feasible |
| 13: Sub-tour elimination of CH2 |
| 14: Feasibility_CH2 = 1 |
| 15: End |
| 16: End |
| 17: End |
After the crossover operator, the next operator is the mutation operator which starts playing a secondary role. To prevent a loss of potentially useful information, which can occasionally be caused by the crossover, the mutation operator is necessary to select one route among the generated routes to mutate the selected route. Every iteration can lead to solutions from the Pareto frontier and may only contain partial solutions to the original problem. New solutions generated following successive iterations may dominate the non-dominated solutions.
4.5. The NSGA-II Algorithm
In this study, the NSGA-II algorithm is employed to solve the proposed MOMINLP model. Indeed, the IRSG algorithm is proposed into the framework of NSGA-II to search for the approximate Pareto front in terms of the total travel time as well as service coverage area. These initial routes are considered into the framework of NSGA-II to generate higher quality final transit routes. Two objective functions are then calculated for each initial solution to calculate the fitness value. All initial solutions are regarded as parents and are used by genetic operators to produce offspring (i.e., tournament selection, crossover, and mutation operators). Algorithm 3 shows the NSGA-II algorithm to solve the proposed MOMINLP model in
Section 3.
| Algorithm 3. The NSGA-II algorithm. |
| 1: Input: Road network, demand matrix, travel time, distance matrix |
| 2: Output: Passenger time, operating costs, and number of required buses on each route. |
| 3: Determining transit route of the network by IRSG procedure to generate the initial solution |
| 4: Setting the parameters as the author has brought in Table 1 and then assign to each route |
| 5: Calculating the frequency of each route |
| 6: Evaluating the fitness based on three factors discussed in Section 4.2. |
| 7: Set gen = 0, |
| 8: While gen < Max gen |
| 9: Select parents using tournament selection |
| 10: Generate offspring by applying crossover and mutation |
| 11: Update frequency on each route |
| 12: Evaluate the fitness |
| 13: Accumulate the population of offspring and parents |
| 14: Assign rank to population |
| 15: Computing the crowding distance |
| 16: Gen = Gen + 1 |
| 17: End while |
| 18: Final population (transit routes) |
After applying the NSGA-II algorithm, the fleet size (operator costs) for each generated route by IRSG procedure is calculated along with the frequency of each route. Then, the total travel time of passengers (user costs), the length of each generated route, the average load factor of all transit routes, and the total amount of demand satisfied on each route (demand coverage) are computed for the network of FMA.
5. Case Study
The Fargo-Moorhead metropolitan area is constituted primarily of the city of Fargo in the state of North Dakota and the city of Moorhead in the state of Minnesota. Fargo has a land area of 128.82 square kilometers and a population of 123,736, while Moorhead has a population of 42,939 and a land area of 57.67 square kilometers [
42]. These two cities are located on the North Dakota–Minnesota state border and are separated by the Red River. The city of Fargo has the highest population in the state of North Dakota [
42].
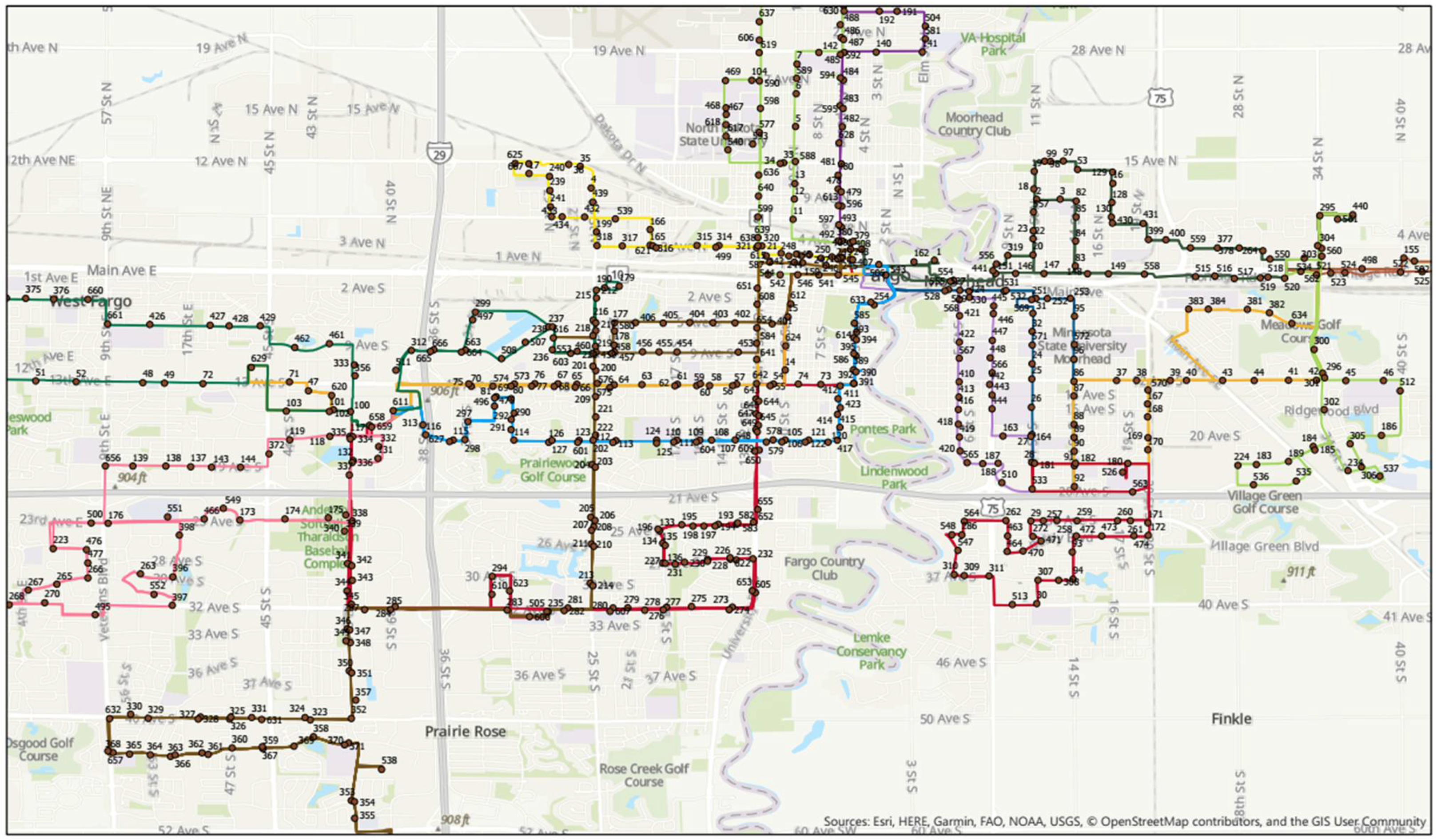
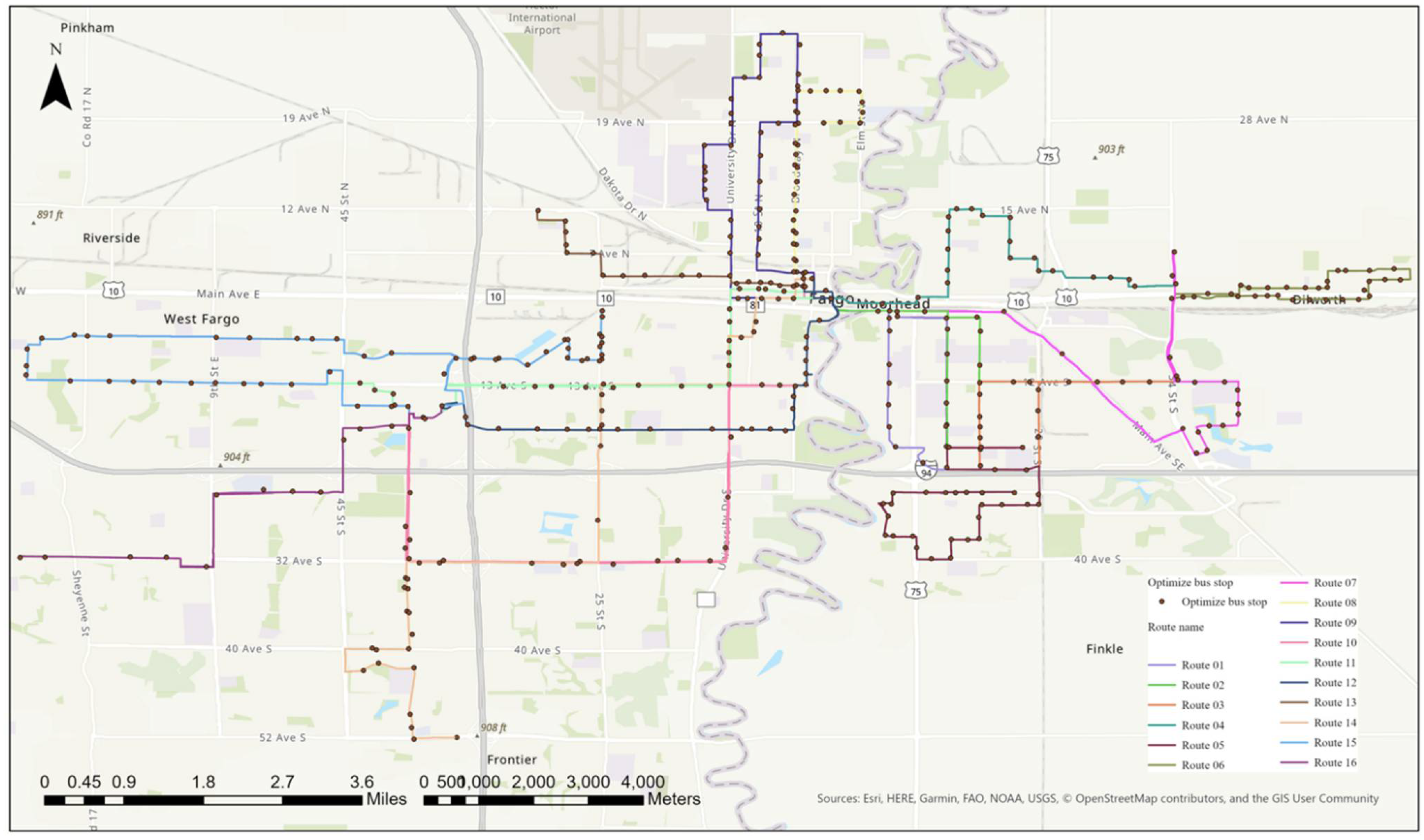
MATBUS is the public transportation provider in FMA. This transit system has 16 routes which are numbered from 1 through 16. The network is constructed by 667 nodes, 974 links, and 193,449 total transit demand and is shown in
Figure 4. Public transportation in FMA can be seen by the MATBUS application [
43]. In the MATBUS application, all the routes are shown by numbers, and by clicking on each route, transit users can see when the first available bus will arrive, how many buses there are in a specific route, the locations of bus stops, and the locations of buses and the direction in which they are moving. More interestingly, this application shows all the available buses in the total network. The background of this application is designed on Google Maps software.
As previously mentioned, the main purpose of this study is to design an efficient public transit system in the FMA to improve upon the existing network for transporting passengers from origins to destinations by applying an efficient NSGA-II algorithm. The benefit of using the NSGA-II algorithm is to find the best route among the existing routes near the optimal solution. The proposed algorithm in this study is coded on MATLAB software 2021 and it consisted of 16 modules such as Transportation Cost, Sort of Population, Roulette wheel selection, remove a repetitive element, Read GIS Data, Pre-processing, Plots Costs, Non-Dominated Sorting, Mutation, Dominates, Crossover, Create Valid Chromosome, Create GIS Information, Count Bus Passenger and Calculating Crowding Distance. The MATLAB software 2021 is connected to a worksheet in MS-Excel to get the information as needed, such as GIS Data, travel demand, and travel time of passengers.
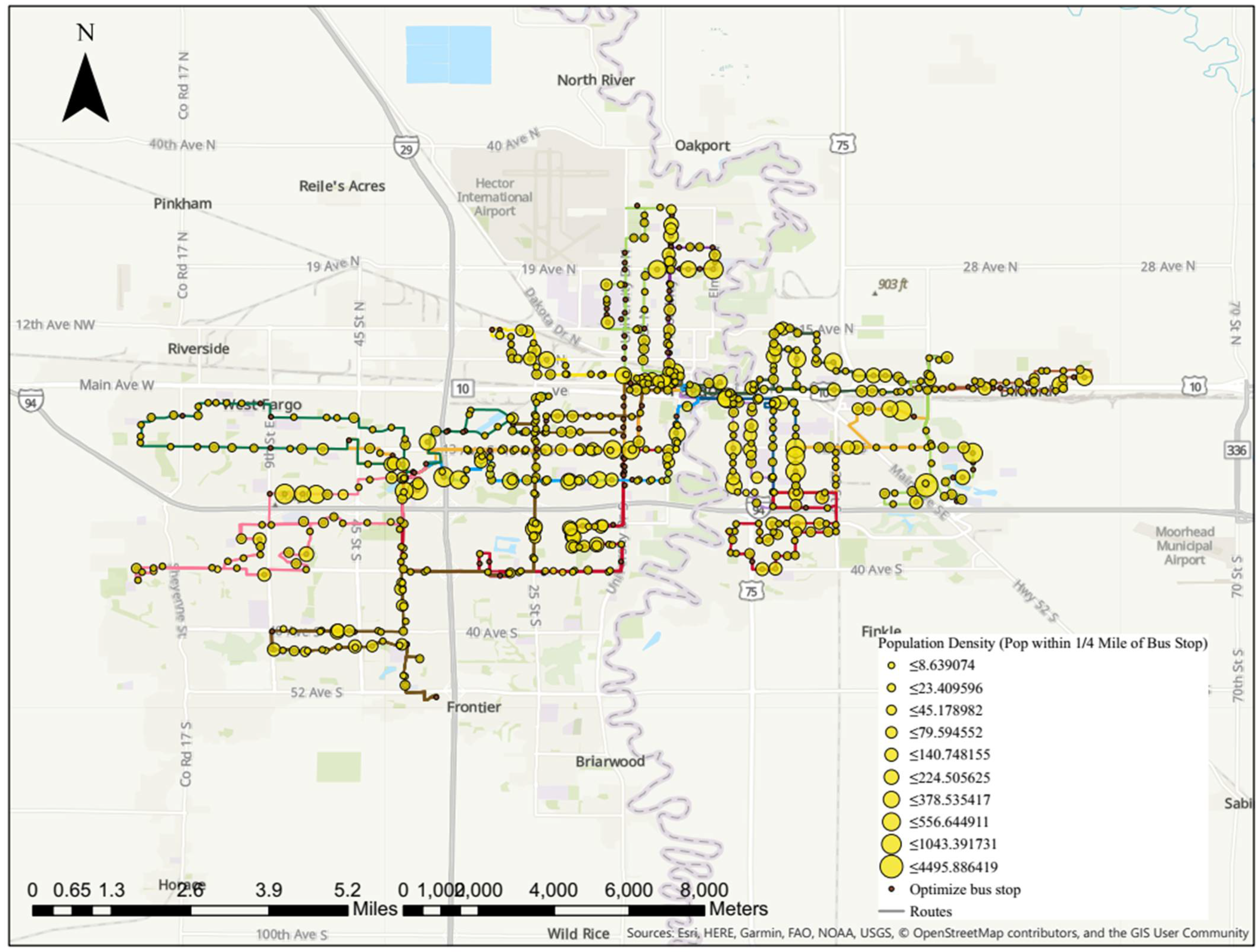
Figure 4 shows the existing routes of the FMA network on ArcGIS Pro version 2.4.2, where each route is shown with different colors and each bus stop is identified by an index number to allow us for easy tracking. Moreover,
Figure 5 displays the population density near each current bus stop by 10 different ranges. What is clear from
Figure 5 is that in some regions of Fargo, the number of people who are living near the bus stop is more than in other areas of the city.
Three matrices are used as the main input data. These include travel time, total distance, and demand metrics. The demand matrix is constructed by a size of 218,089 elements, including 76,121 pairs of nodes with non-zero demand and 117,328 pairs with zero demand. The travel time and distance matrices have the same size as the demand matrix.
7. Conclusions
This paper studied the TNDP model in public transit systems. The TNDP model aims to determine the set of routes and frequency on each route for public transportation systems. The TNDP model is classified as an NP-Hard combinatorial optimization problem [
18,
19], whose optimal solution is difficult to be found. In this study, by proposing the IRSG algorithm procedure, the TNDP model is solved to generate a set of transit routes. Indeed, the purpose of the proposed IRSG algorithm was to produce high-quality initial route set solutions to reach better optimization procedures. Second, the MOMINLP model is proposed to formulate the frequency setting problem on each route by minimizing the total travel time of passengers (user costs) to serve a greater number of travelers and minimizing operator costs simultaneously as well as maximizing the service coverage area near all the existing bus stops in FMA network.
Because of the complexity of the proposed model, the NSGA-II algorithm was applied, considering two objective functions at the same time. Based on the nature of the two proposed objective functions, the NSGA-II algorithm is employed to produce a Pareto front optimal solution. The obtained solutions by the proposed algorithm in the Pareto front are non-dominated solutions which means that no solutions in the frontier are better than others. On the other hand, the obtained solutions by Pareto frontier are the set of solutions that encourage the planner to choose a solution to satisfy passenger or operator interest as much as they want.
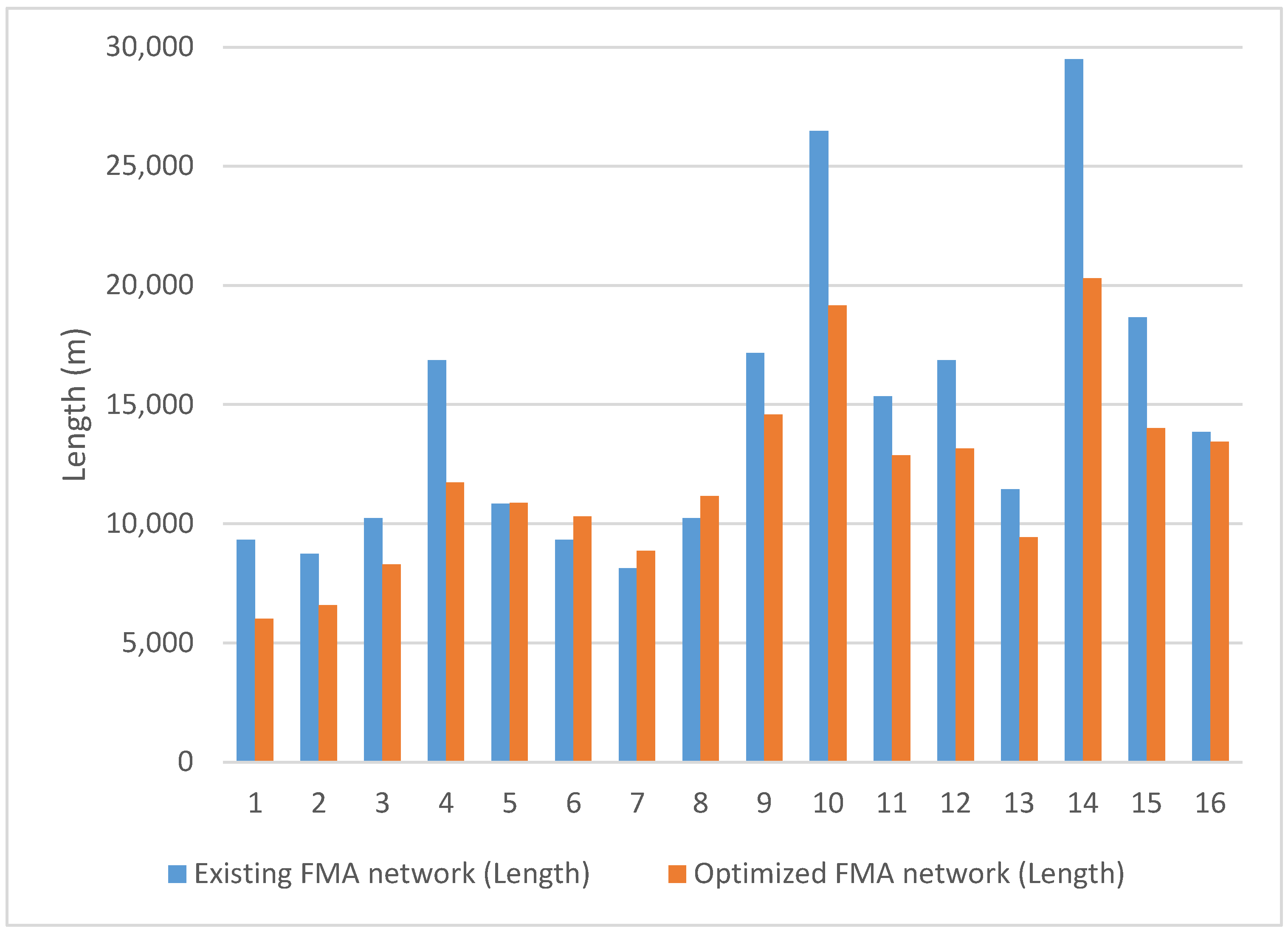
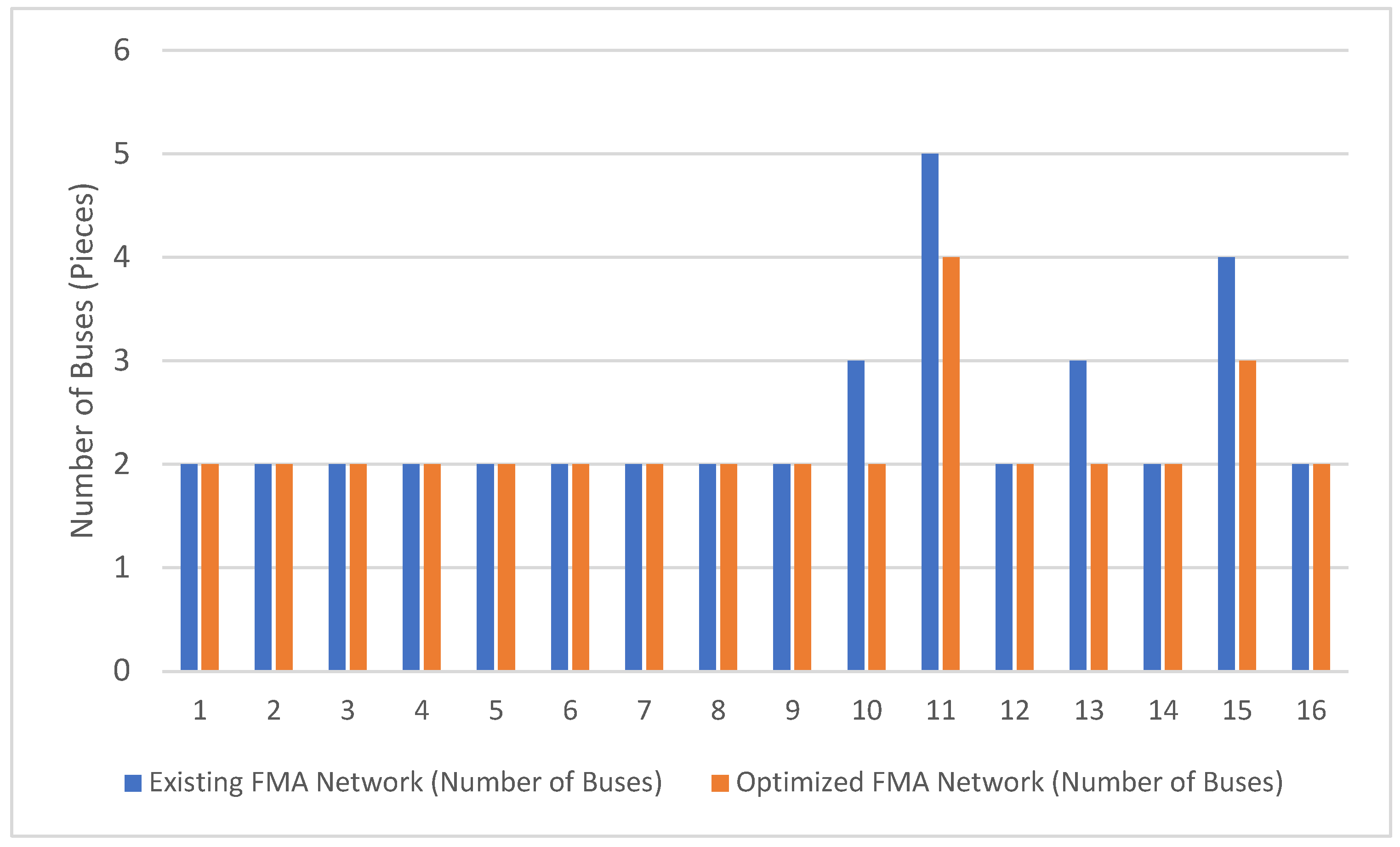
This paper for the first time considered the case study of FMA to improve the existing condition of operating buses and transit routes. Indeed, by applying the model to the case study, the existing network could be improved in several ways. The optimized network is shown to meet more demand, reduce travel time of passengers, and require fewer operating buses. Total user costs could decrease more than 9 percent and operating costs by 19 percent. Average route length in the new network decreased from 14,560 m to 11,922 m, showing that the proposed IRSG algorithm could produce a set of efficient transit routes. The load factors could increase from 68 to 73 percent. Finally, the number of buses operating in the network decreased by 4 buses. Results show that the proposed methodology works remarkably well.
By conducting this research, people living in FMA can benefit in terms of improved public welfare and access to social needs. By reducing the number of operating buses, the amount of pollution into the air can be decreased. Moreover, designing a new set of transit routes could considerably decrease the investment in public transit systems in FMA. Alternatively, the cost savings provided by the model could allow the transit agency to expand its service, either by providing more routes or improving frequency so that it can better serve the transportation needs of the public. Moreover, by reducing the total travel time of passengers, people are more likely to use the bus instead of using their vehicles, which leads to a decrease in fuel consumption. Furthermore, by maximizing the service coverage, the optimized network could meet more of the demand. Therefore, by improving the existing network of FMA in North America, more passengers can be served. While this model was shown to be successfully applied to the FMA network, it could be applied to transit networks in other cities. Results show that transit systems in small urban areas, which are challenged to provide efficient service in an environment of dispersed demand and low population densities, can improve their system design using this optimization model.
For future research, the proposed algorithm can be tested on the popular Mandl’s Swiss Network, which is proposed by Mandl [
21]. Moreover, the model can be expanded by considering congestion, vehicle performance, different policy requirements, new bus stop locations, and making some simple modifications to the proposed objective function by including cost minimization and maximization of the number of trips without transfers. The dynamic design of bus services on each generated route can be considered as a real-time condition in future work. Finally, other heuristics algorithms such as multi-objective particle swarm optimization with multiple search strategies, bee colony, and tabu-search can be an alternative for this study to generate better results.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}














