
Performance Investigation of Switched Reluctance Motor Driven by Quasi-Z-Source Integrated Multiport Converter with Different Switching Algorithms


Abstract
:1. Introduction
- Simultaneous magnetization of the on-going phase and regenerative demagnetization for the off-going phase.
- Simultaneous magnetization of the on-going phase and freewheeling of the off-going phase.
- The speed range is limited because simultaneous magnetization and demagnetization of two SRM phases cannot be realized.
- It cannot offer a boosting gain; thus, magnetization and demagnetization are achieved with voltages equal to the source voltage. Therefore, it cannot offer fast magnetization and demagnetization, resulting in low torque productivity from SRM.
- A high decoupling capacitor is required to decouple the difference in the instantaneous power. This represents an obstacle to the overall reliability and the commercial competitiveness of SRM drives.
- C–dump converters were introduced to offer boosting voltage capability [18]. In this converter, the capacitor voltage is usually regulated to offer double the input voltage during demagnetization. Although this offers fast demagnetization for the off-going phase, the torque productivity is still limited due to the low voltage offered during magnetization of the on-going phase.
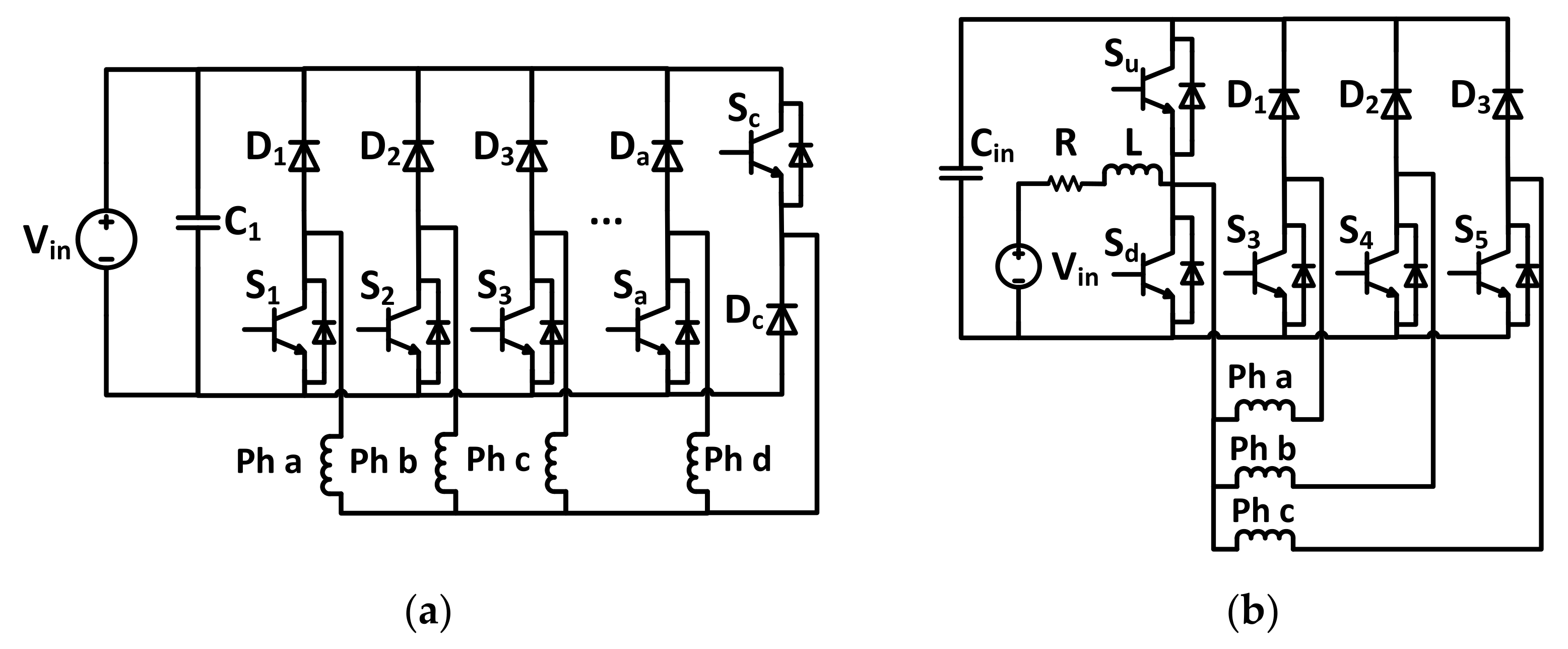
- An integrated multi-port converter (IMPC) is presented in [10] and shown in Figure 4b. In this topology, the SRM phase voltage can be significantly increased through an integrated DC-DC boost converter to the star-connected topology. Compared to the basic star-connected configuration, IMPC needs to replace the diode of the common asymmetric leg with another switch. IMPC can offer two benefits: first, the necessary capacitance can be reduced significantly, decreasing both the cost and size of the drive; second, it can offer high torque productivity, as the magnetization and demagnetization voltages are increased. However, the boosting unit of IMPC increases the voltage stress on the capacitor and semiconductors.
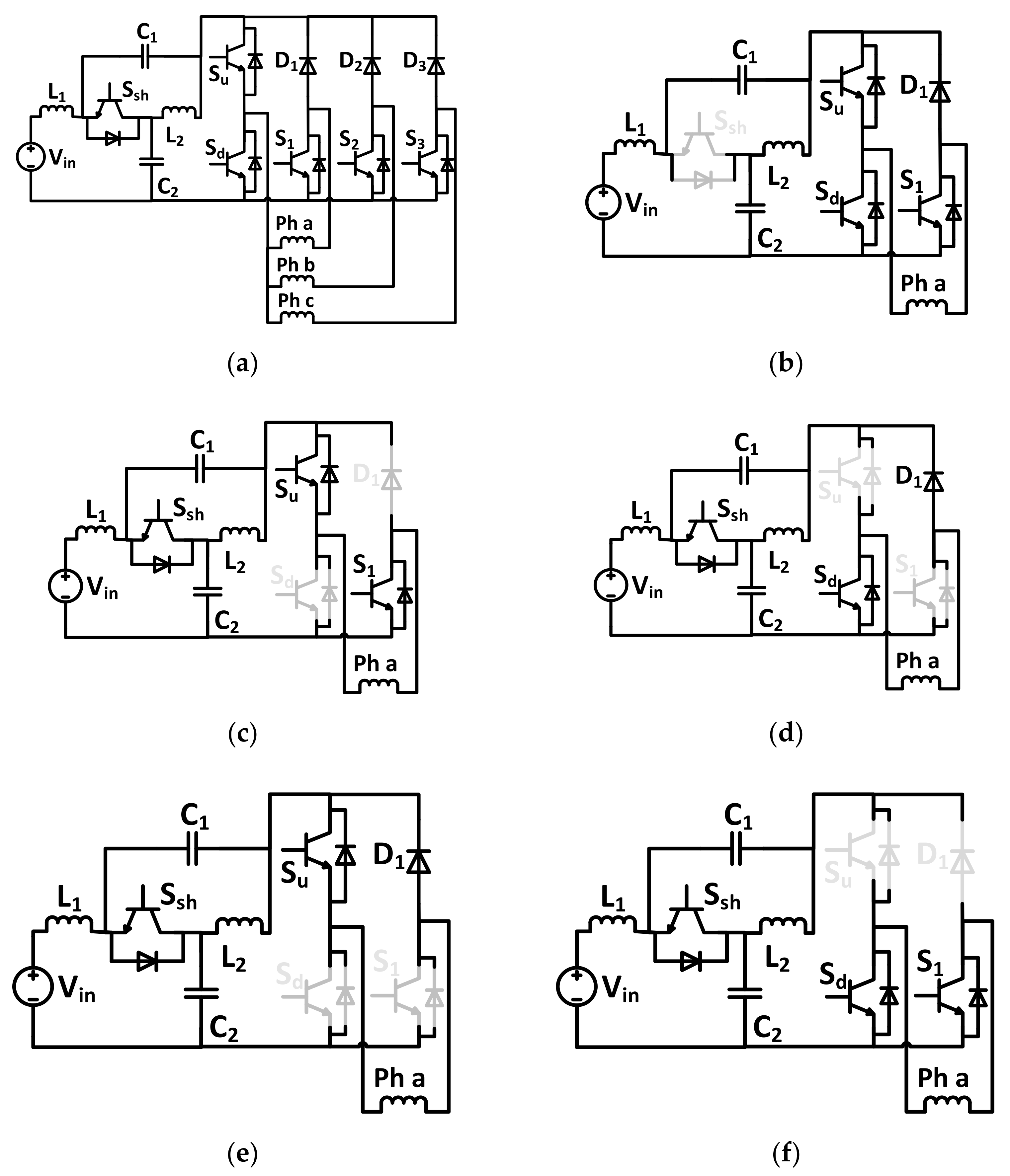
- A quasi-Z-source integrated multiport power converter (QZIMPC), shown in Figure 5a, was recently presented in [11]. In this converter, a quasi-Z-source unit is impeded in front of IMPC in place of a single inductor. This maintains the advantages of IMPC while decreasing the voltage rating of the capacitors.
2. Materials and Methods
2.1. Topology Description
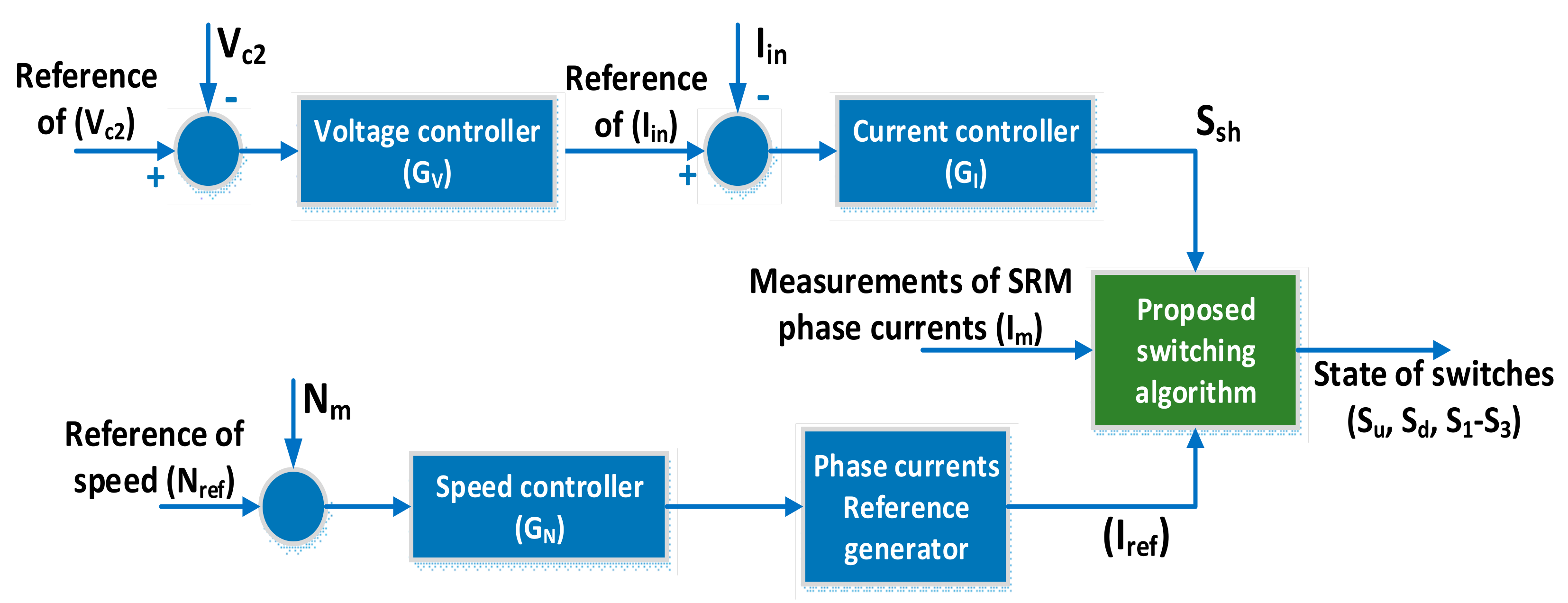
2.2. Control System Description
2.3. Proposed Switching Algorithm
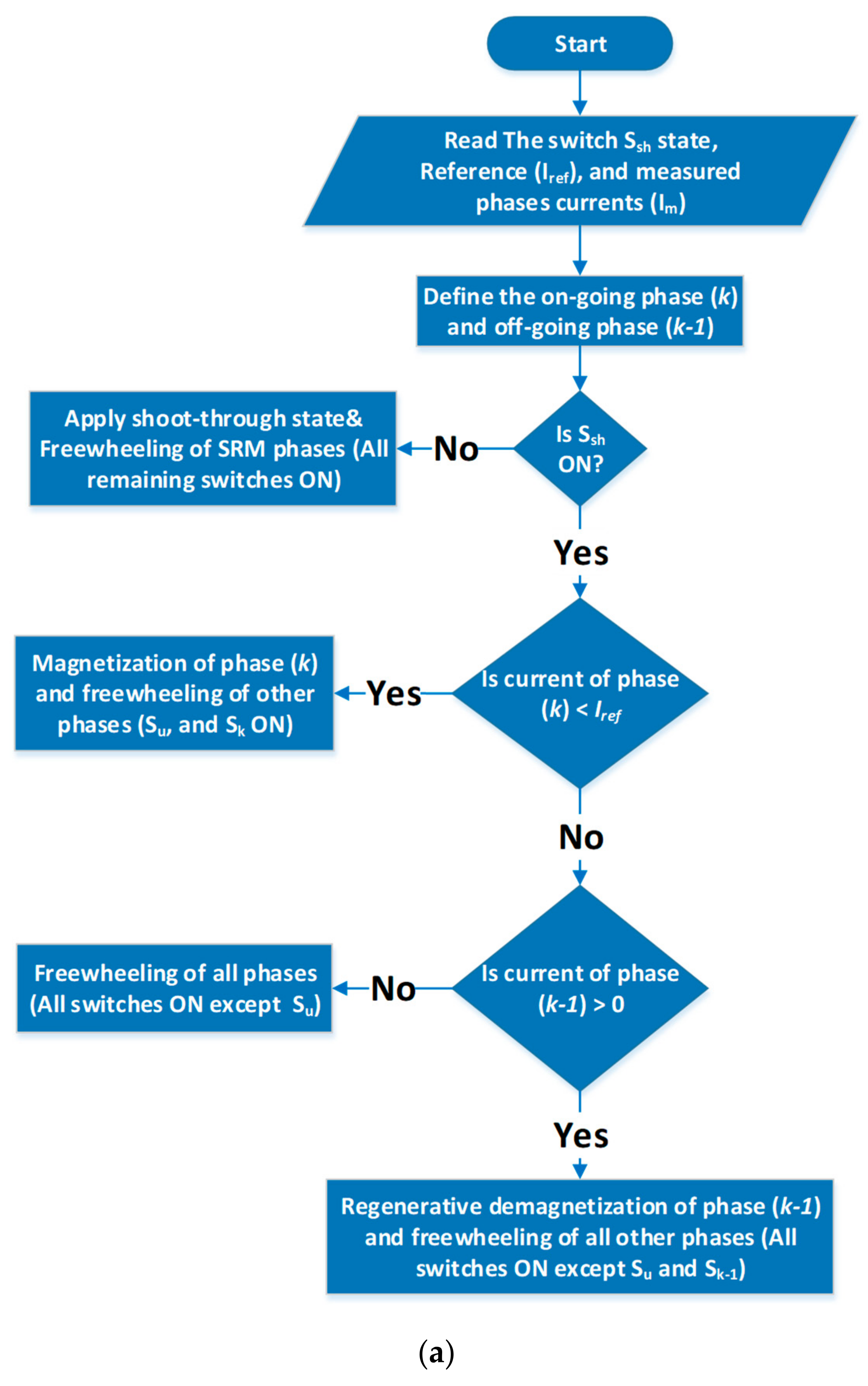
2.3.1. Algorithm#1
- The on-going and off-going phases are identified according to the reference values of SRM phase currents. They are denoted as phase k and k-1, respectively.
- According to the state of the switch Ssh, it can be determined whether or not the quasi-Z-source unit is in the shoot-through mode. If Ssh is OFF (shoot-through mode), then the switches Su and Sd are switched ON. In addition, all other phase switches (S1–S3) are turned ON to operate the SRM phases in freewheeling mode.
- If Ssh is ON (non-shoot through mode), the algorithm will check the measured current of the on-going phase (k).
- If the current of that phase is less than its reference value, the switches (Su and Sk) are turned ON to apply positive voltage during that phase (magnetization mode). On the other hand, the switch Sd, along with the switches of the other phases, is turned OFF to operate these phases in freewheeling mode.
- If the current of the on-going phase (k) is higher than or equal to its reference phase current, the algorithm will check the measured current of the off-going phase (k-1).
- If there is no current in that phase (which means that the off-going phase is completely demagnetized), then freewheeling should be applied to on-going and off-going SRM phases. There are two options to achieve this mode: the first option is to turn the switch Sd ON along with all other phase switches (S1–S3), and the second option is to turn the switch Su ON and turn OFF all other phase switches.
- If there is still current flowing in the off-going phase (k-1), negative voltage is applied to that phase to accelerate the demagnetization process; this is achieved through turning the switch Sd ON and turning the Sk-1 phase switch OFF; meanwhile, the remaining phases are operated in freewheeling mode by turning their corresponding switches ON.
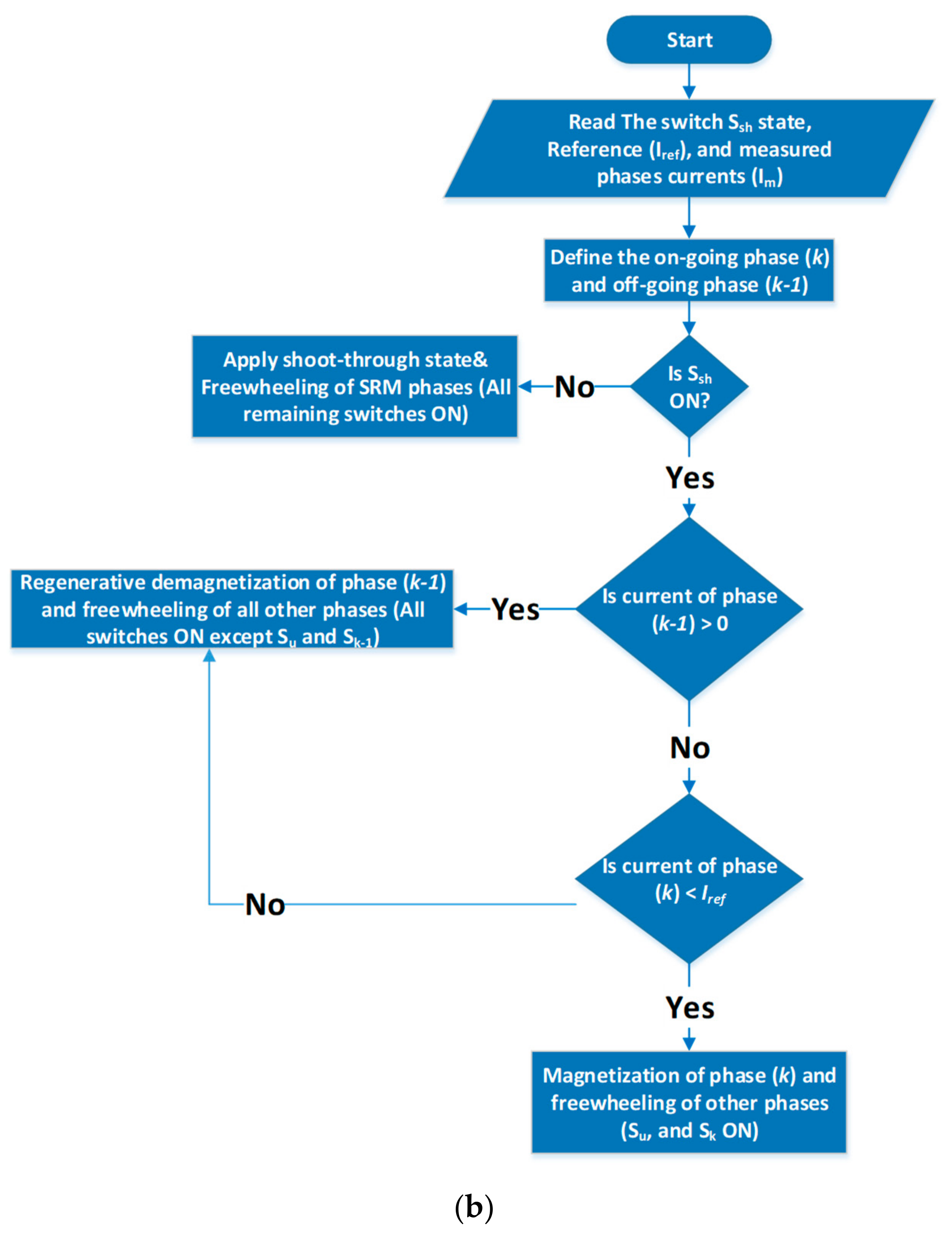
2.3.2. Algorithm#2
- If the current of that phase is more than zero, the Sd switch is turned ON to apply negative voltage to that phase (demagnetization mode). Otherwise, the other phase switches (Si(i#k-1)) are turned ON to operate these phases in freewheeling mode.
- If the off-going phase (k-1) is fully demagnetized, i.e., its current becomes zero, the algorithm will check the measured current of the on-going phase (k).
- If the current of that phase is less than its reference value, the switches (Su and Sk) are turned ON to apply positive voltage during that phase (magnetization mode). On the other hand, the switch Sd, along with the other phase switches, is turned OFF to operate these phases in freewheeling mode.
- If the current of that phase is more than or equal to its reference value, the switch Sd and all phase switches are turned ON to operate all the phases in freewheeling mode.
3. Results and Discussion
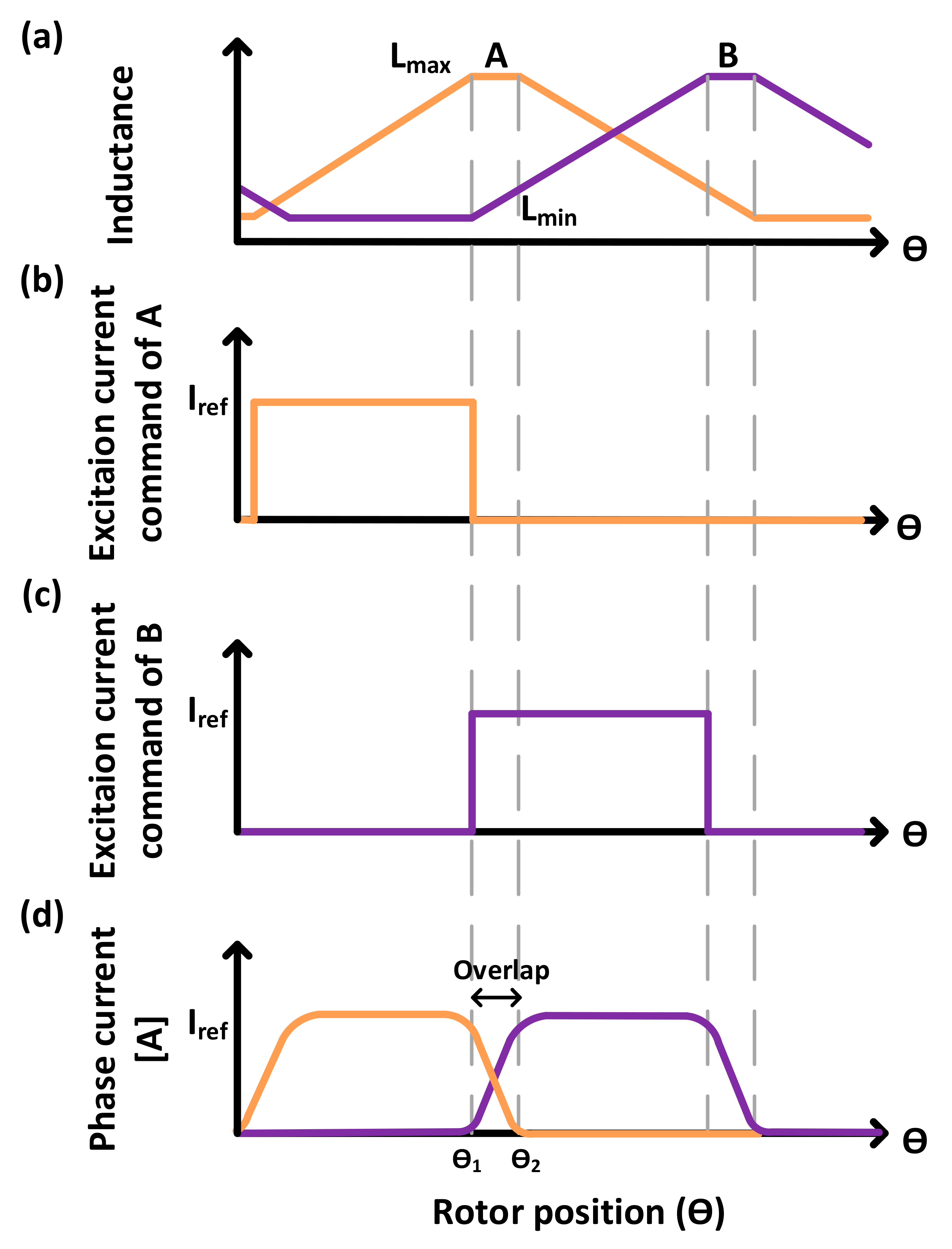
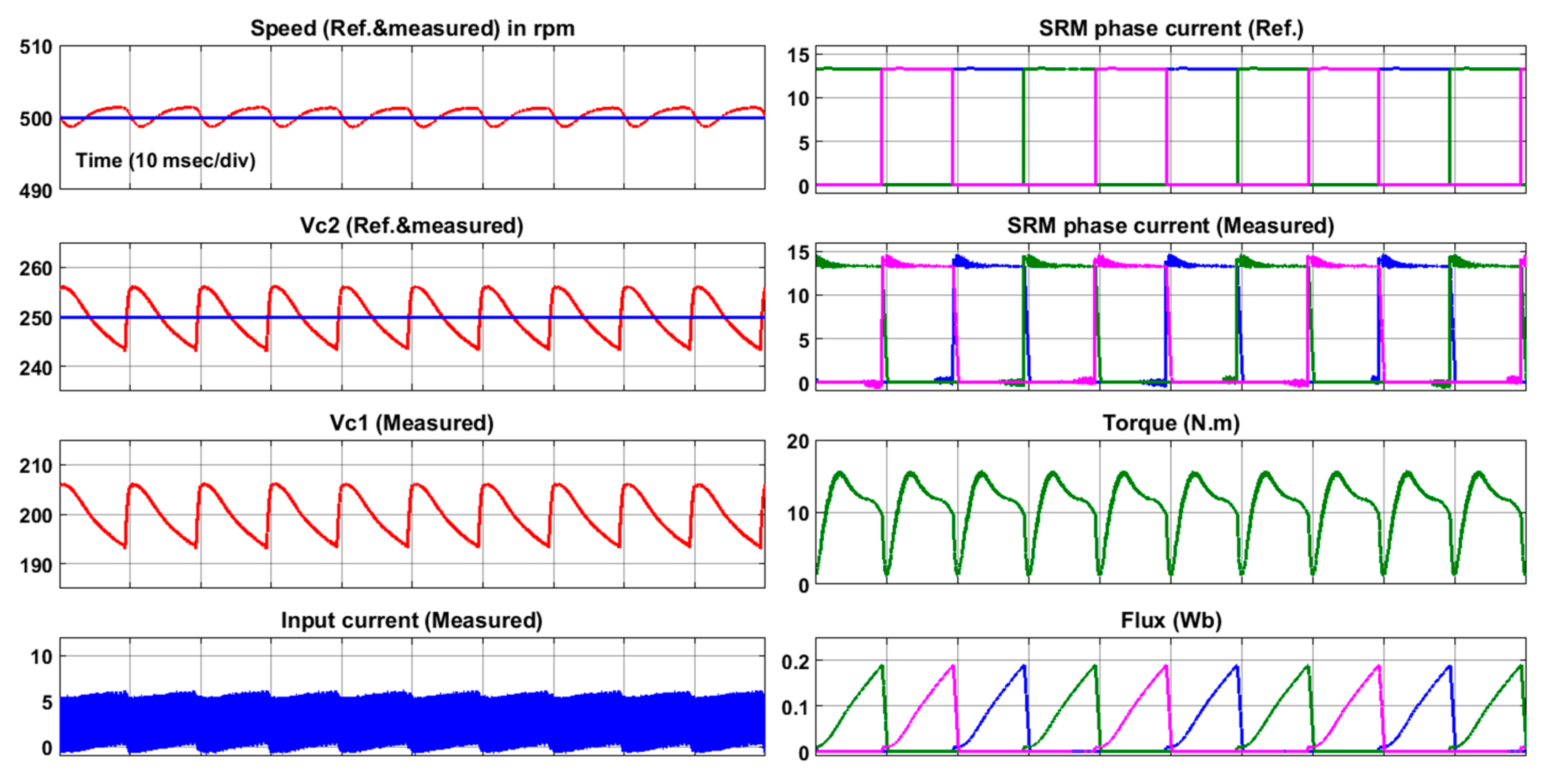
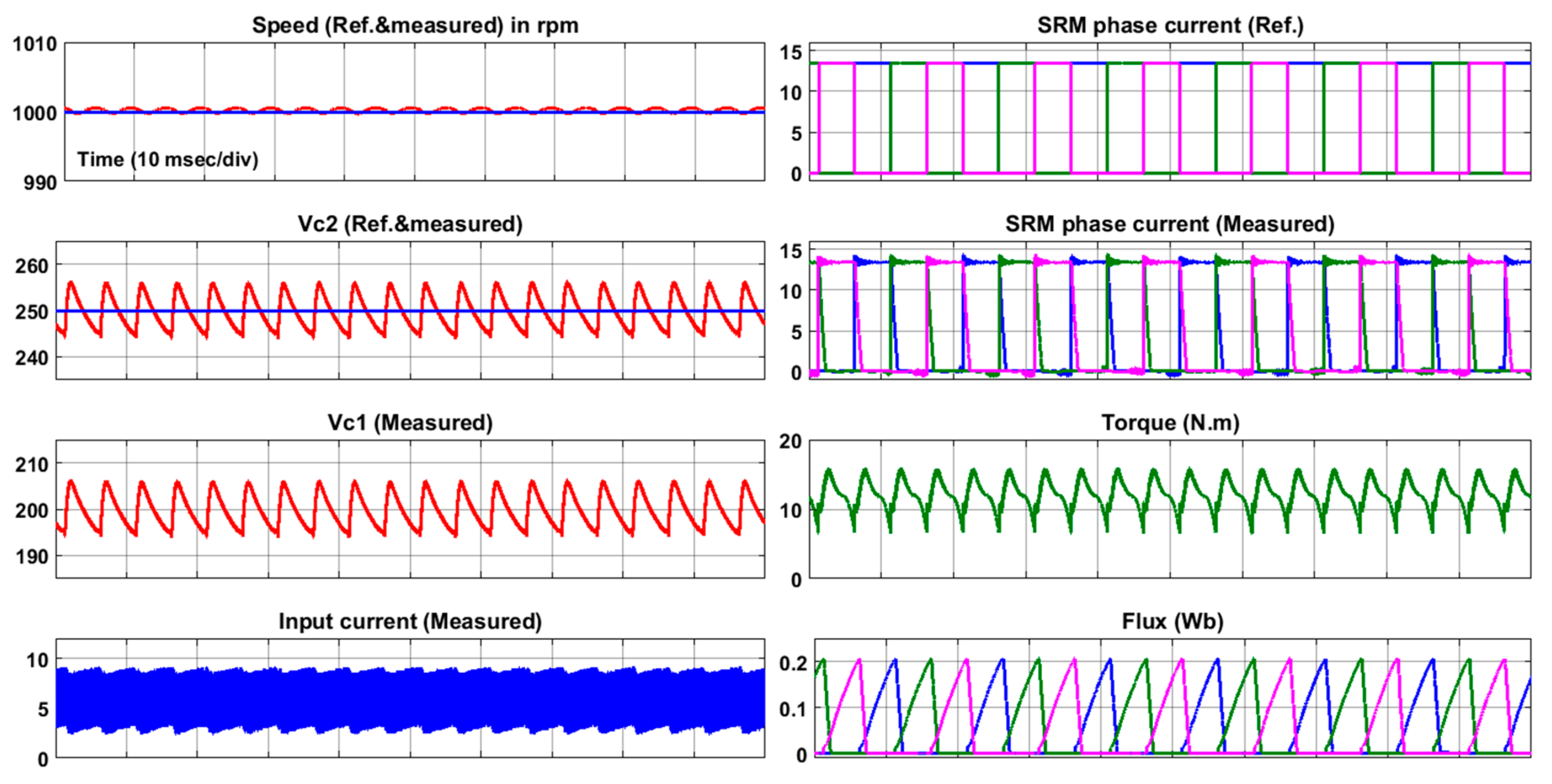
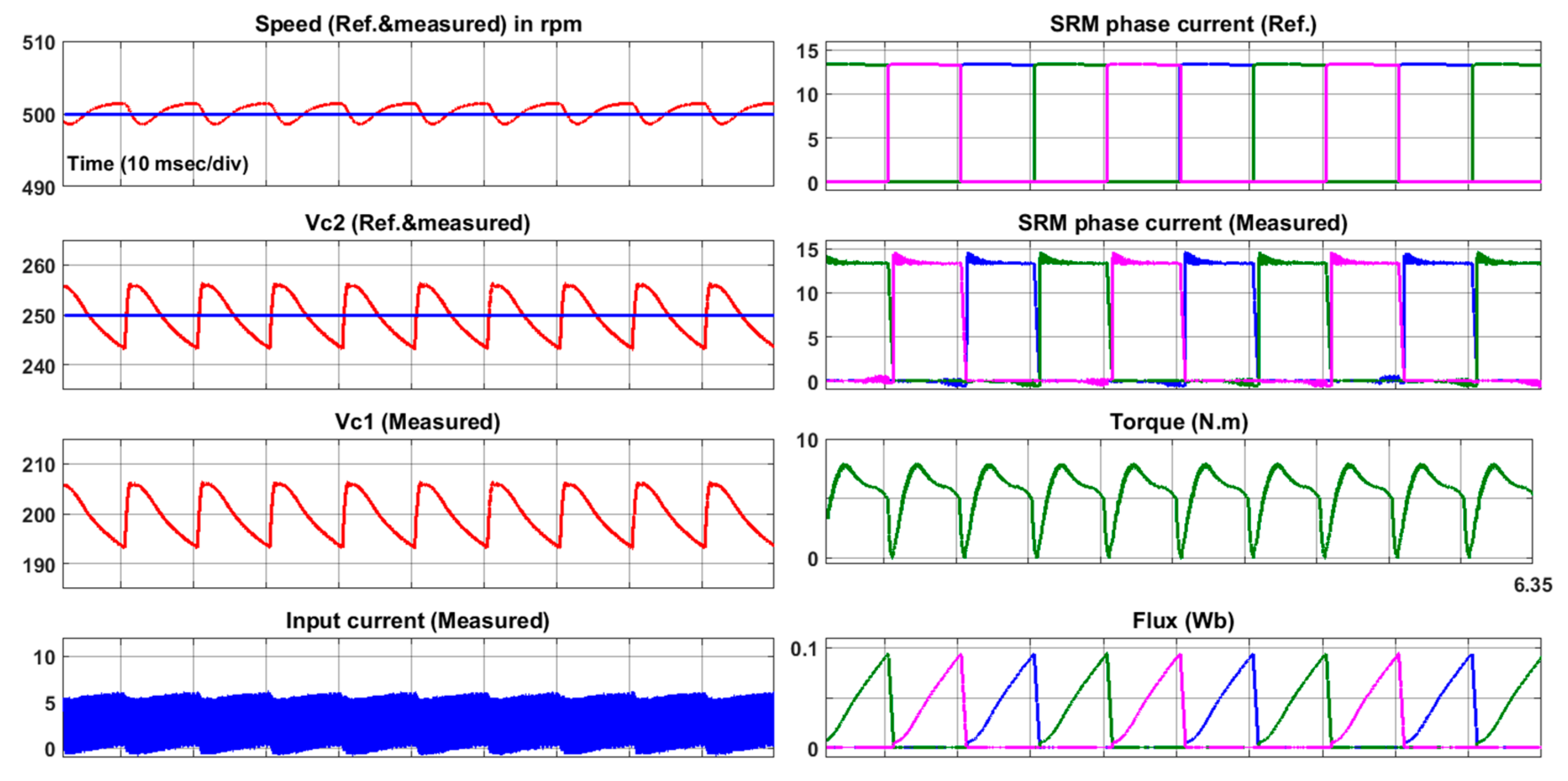
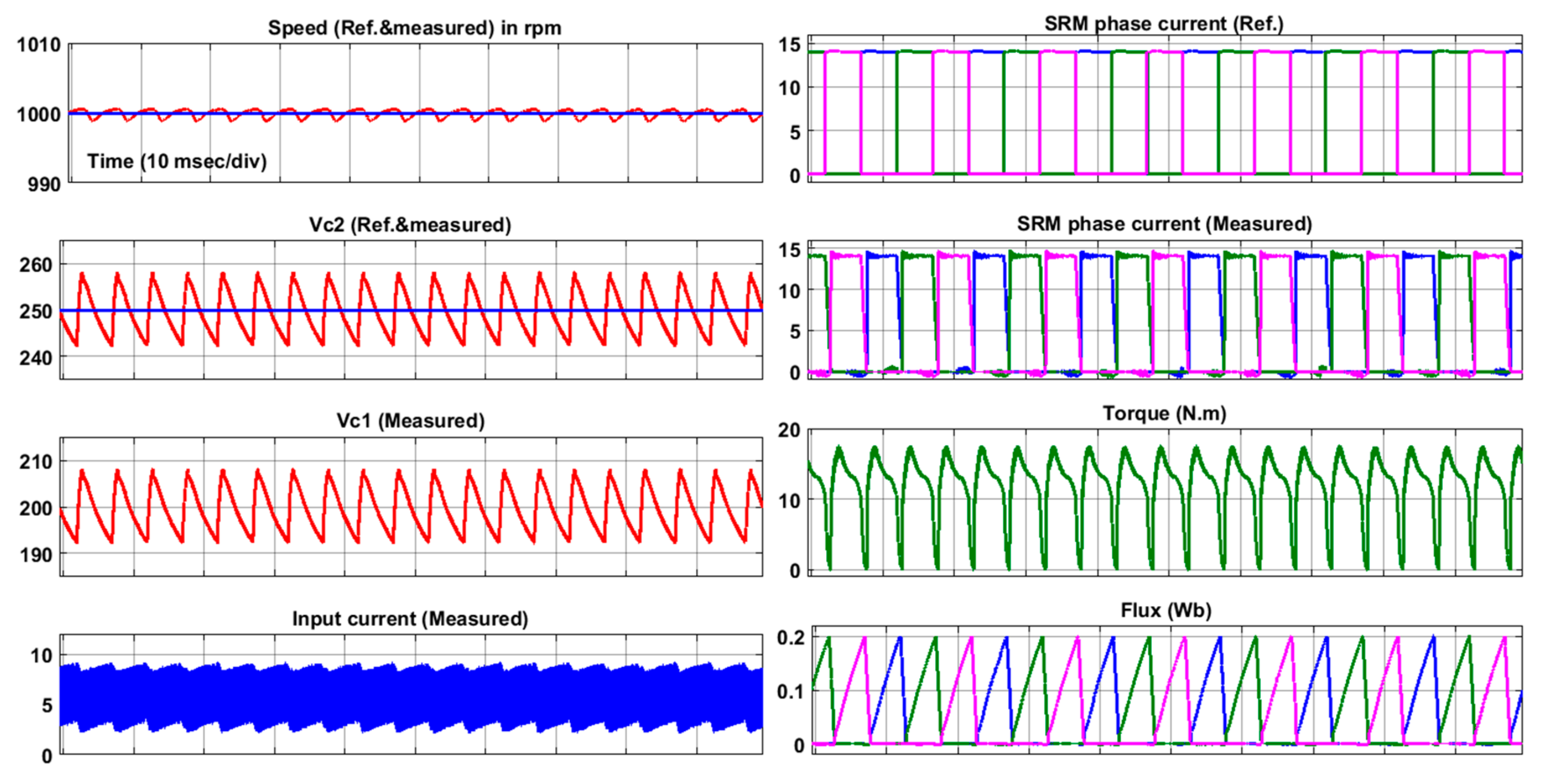
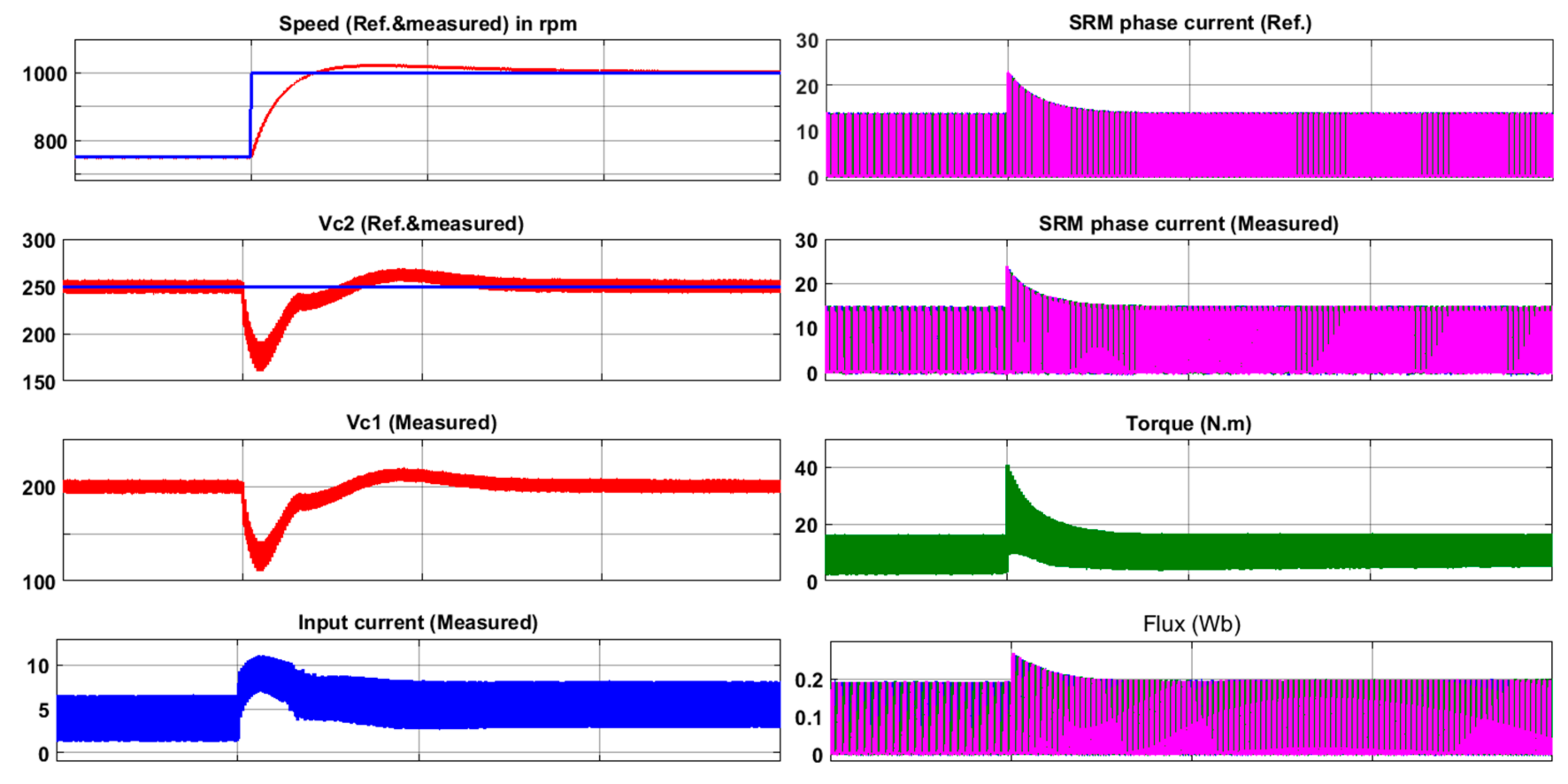
- Table 2 shows that algorithm#1 offers low torque ripple compared to the switching algorithm#2. This can be illustrated using the torque expression in (1). According to this expression, the torque is changed with the square of the phase current. Therefore, during the demagnetization period of the off-going phase, the value of the torque produced from that phase will be decreased. To maintain constant torque, current overlap between the on-going and off-going phases should be adopted. As algorithm#1 guarantees the overlap operation of the two phases, the torque ripple can be significantly reduced. On the other hand, algorithm#2 does not allow for the magnetization of the on-going phase without ensuring complete demagnetization of the off-going phase. Therefore, the developed torque will contain higher ripple during commutation.
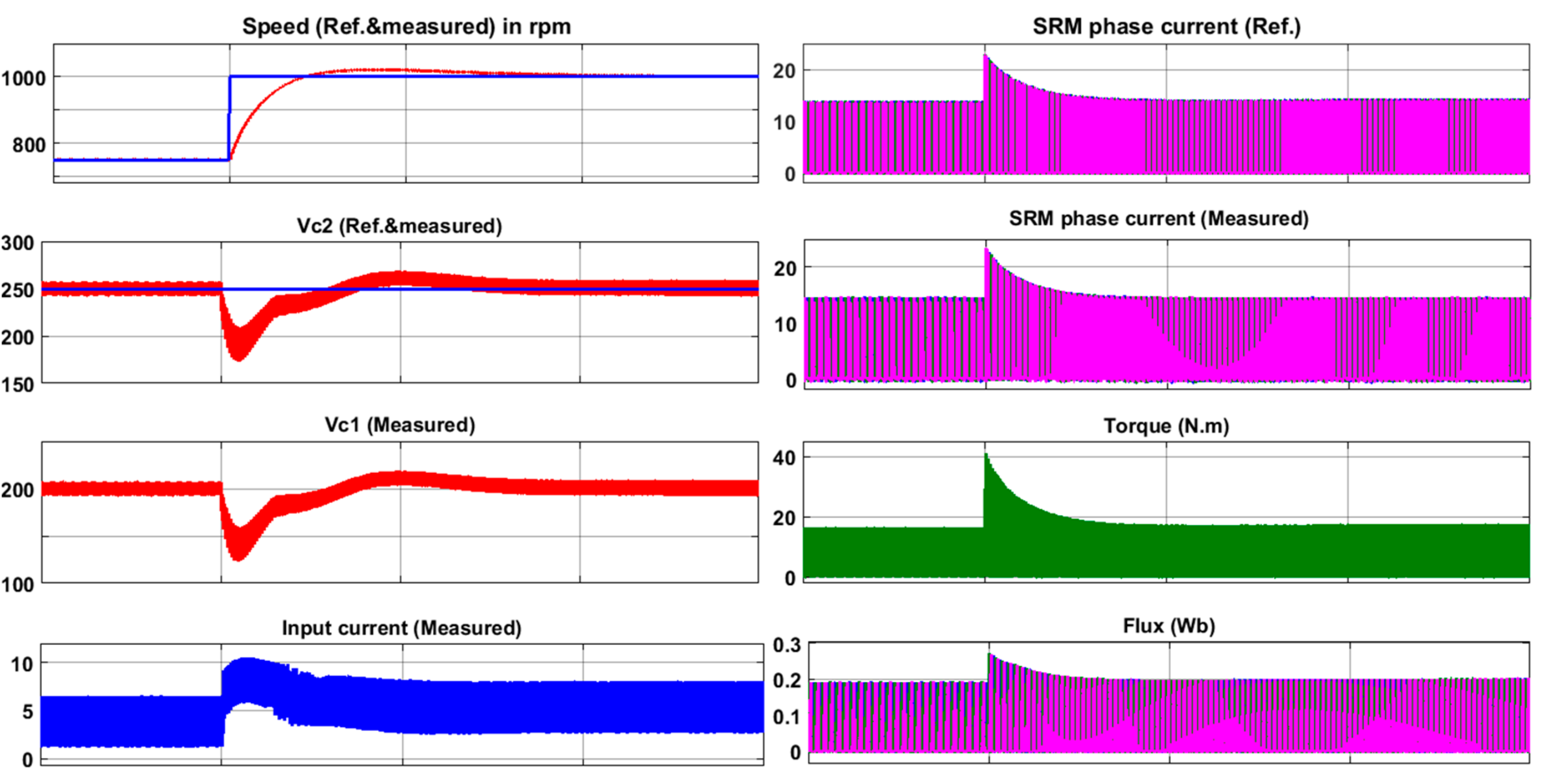
- There is almost no significant change in the SRM phase current between the two algorithms. It is worth noting that increasing the speed of SRM does not significantly increase the SRM phase current. Increasing the speed mainly causes an increase in the input current. This implies that the motor’s increased speed is not limited by the cross-section area of the phase winding. Compared to the results revealed from [10], the switching algorithms introduced here offer wide speed range operation.
- The capacitor voltage is well tracked. The voltage ripples over the two capacitors are also small. This guarantees the low thermal stresses expected on the capacitors of the quasi-Z-source unit. The frequency of the voltage ripples increases with motor speed.
- According to the simulation results, more speed ripples can be observed at low speed using the two switching algorithms. Thus, adaptive controllers should be used for better performance over a wide speed range. Such adaptive controllers are usually used in systems with high inherent nonlinear characteristics, such as SRM. High performance can hardly be acquired over wide operating points by using traditional linear controllers, and these are generally not sufficient for high-performance drives. The literature has already proposed some adaptive methods to achieve this purpose with SRM, such as those in [22,23,24].
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rojas-Delgado, B.; Alonso, M.; Amaris, H.; De Santiago, J. Wave power output smoothing through the use of a high-speed kinetic buffer. Energies 2019, 12, 2196. [Google Scholar] [CrossRef] [Green Version]
- Omaç, Z.; Cevahir, C. Control of switched reluctance generator in wind power system application for variable speeds. Ain Shams Eng. J. 2021, 2090447921000356. [Google Scholar] [CrossRef]
- Bilgin, B.; Jiang, J.W.; Emadi, A. (Eds.) Switched Rreluctance Motor Drives: Fundamentals to Applications, 1st ed.; CRC Press/Taylor & Francis Group: Boca Raton, FL, USA; Abingdon, UK, 2018. [Google Scholar]
- Lan, Y.; Benomar, Y.; Deepak, K.; Aksoz, A.; Baghdadi, M.; Bostanci, E.; Hegazy, O. Switched reluctance motors and drive systems for electric vehicle powertrains: State of the art analysis and future trends. Energies 2021, 14, 2079. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and challenges of switched reluctance motor drives for electric propulsion: A comparative study. IEEE Trans. Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Pires, V.F.; Pires, A.J.; Cordeiro, A.; Foito, D. A review of the power converter interfaces for switched reluctance machines. Energies 2020, 13, 3490. [Google Scholar] [CrossRef]
- Reis, R.R.C.; Kimpara, M.L.M.; Pinto, J.O.P.; Fahimi, B. Multi-physics simulation oF 6/4 switched reluctance motor by finite element method. Eletrônica De Potecirc. 2021, 26, 1–11. [Google Scholar] [CrossRef]
- Neuhaus, C.R.; Fuengwarodsakul, N.H.; De Doncker, R.W. Control scheme for switched reluctance drives with minimized DC-link capacitance. IEEE Trans. Power Electron. 2008, 23, 2557–2564. [Google Scholar] [CrossRef]
- Liu, X.; Zhu, Z.Q.; Hasegawa, M.; Pride, A.; Deodhar, R.; Maruyama, T.; Chen, Z. Dc-link capacitance requirement and noise and vibration reduction in 6/4 switched reluctance machine with sinusoidal bipolar excitation. In Proceedings of the 2011 IEEE Energy Conversion Congress and Exposition, Phoenix, AZ, USA, 17–22 September 2011; pp. 1596–1603. [Google Scholar] [CrossRef]
- Cai, W.; Yi, F. An integrated multiport power converter with small capacitance requirement for switched reluctance motor drive. IEEE Trans. Power Electron. 2016, 31, 3016–3026. [Google Scholar] [CrossRef]
- Yi, F.; Cai, W. A Quasi-Z-source integrated multiport power converter as switched reluctance motor drives for capacitance reduction and wide-speed-range operation. IEEE Trans. Power Electron. 2016, 31, 7661–7676. [Google Scholar] [CrossRef]
- Husain, I. Minimization of torque ripple in SRM drives. IEEE Trans. Ind. Electron. 2002, 49, 28–39. [Google Scholar] [CrossRef]
- Xue, X.; Cheng, E.K.W.; Ho, S.L. Optimization and evaluation of torque-sharing functions for torque ripple minimization in switched reluctance motor drives. IEEE Trans. Power Electron. 2009, 24, 2076–2090. [Google Scholar] [CrossRef] [Green Version]
- Adam, A.A.; Gulez, K. Torque Control of PMSM and Associated Harmonic Ripples. Available online: https://www.intechopen.com/chapters/13716 (accessed on 10 February 2011).
- Pollock, C.; Michaelides, A. Switched reluctance drives: A comparative evaluation. Power Eng. J. 1995, 9, 257–266. [Google Scholar] [CrossRef]
- Gairola, S.; Priti; Paliwal, L.N. A new power converter for SRM drive. In Proceedings of the 2010 International Conference on Power, Control and Embedded Systems, Allahabad, India, 29 November 2010; pp. 1–6. [Google Scholar]
- Shamsi, P.; Fahimi, B. Single-bus star-connected switched reluctance drive. IEEE Trans. Power Electron. 2013, 28, 5578–5587. [Google Scholar] [CrossRef]
- Riyadi, S. Analysis of C-Dump Converter for SRM Drives. In Proceedings of the 2018 International Conference on Electrical Engineering and Informatics (ICELTICs) (44501), Banda Aceh, Indonezia, 19–20 September 2018; pp. 179–184. [Google Scholar]
- Yang, Y.; Ma, K.; Wang, H.; Blaabjerg, F. Instantaneous thermal modeling of the DC-link capacitor in PhotoVoltaic systems. In Proceedings of the 2015 IEEE Applied Power Electronics Conference and Exposition (APEC), Charlotte, NC, USA, 15–19 March 2015; pp. 2733–2739. [Google Scholar]
- Wang, H.; Blaabjerg, F. Reliability of capacitors for DC-Link applications in power electronic converters—An Overview. IEEE Trans. Ind. Appl. 2014, 50, 3569–3578. [Google Scholar] [CrossRef] [Green Version]
- Song, S.; Xia, Z.; Zhang, Z.; Liu, W. Control performance analysis and improvement of a modular power converter for three-phase srm with y-connected windings and neutral line. IEEE Trans. Ind. Electron. 2016, 63, 6020–6030. [Google Scholar] [CrossRef]
- Alrifai, M.; Zribi, M.A.; Krishnan, R.; Rayan, M. Nonlinear speed control of switched reluctance motor drives taking into account mutual inductance. J. Control. Sci. Eng. 2008, 2008, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Reay, D.; Mirkazemi-Moud, M.; Green, T.; Williams, B. Switched reluctance motor control via fuzzy adaptive systems. IEEE Control. Syst. 1995, 15, 8–15. [Google Scholar] [CrossRef]
- Rouhani, H.; Milasi, R.M.; Lucas, C. Speed control of switched reluctance motor (SRM) using emotional learning based adaptive controller. In Proceedings of the 2005 International Conference on Control and Automation, Budapest, Hungary, 26–29 June 2005; Volume 1, pp. 330–334. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | |
|---|---|---|
| SRM | SRM configuration | 3-phase 6/4 |
| Inertia | 0.05 Kg·m2 | |
| Friction coefficient | 0.02 N·m·s | |
| Inductances (L1 & L2) | 1 mH | |
| QZIMPC | Capacitances (C1 & C2) | 220 uF |
| Input voltage | 48 V |
| Speed | ΔTe | Iph | |
|---|---|---|---|
| 500 | Algorithm#1 | 1–15.5 | 13 |
| Algorithm#2 | 0–16 | 13 | |
| 1000 | Algorithm#1 | 8–15.5 | 13.5 |
| Algorithm#2 | 0–18 | 14 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gaafar, M.A.; Abdelmaksoud, A.; Orabi, M.; Chen, H.; Dardeer, M. Performance Investigation of Switched Reluctance Motor Driven by Quasi-Z-Source Integrated Multiport Converter with Different Switching Algorithms. Sustainability 2021, 13, 9517. https://doi.org/10.3390/su13179517
Gaafar MA, Abdelmaksoud A, Orabi M, Chen H, Dardeer M. Performance Investigation of Switched Reluctance Motor Driven by Quasi-Z-Source Integrated Multiport Converter with Different Switching Algorithms. Sustainability. 2021; 13(17):9517. https://doi.org/10.3390/su13179517
Chicago/Turabian StyleGaafar, Mahmoud A., Arwa Abdelmaksoud, Mohamed Orabi, Hao Chen, and Mostafa Dardeer. 2021. "Performance Investigation of Switched Reluctance Motor Driven by Quasi-Z-Source Integrated Multiport Converter with Different Switching Algorithms" Sustainability 13, no. 17: 9517. https://doi.org/10.3390/su13179517