1. Introduction
In the past few years, the shipping industry has been introducing necessary measures to improve safety and environmental performance. For example, 30 years ago, oil leakage and personal injuries were a very serious problem [
1,
2]. About 300,000 tons of oil leaked every year while thousands of human-beings were injured, but today, the number of leakage incidents per year is only about 5000 tons and 900 people died in ship accidents worldwide [
3]. Affected by the increasingly extreme climate, for example, the storms that occur in China’s coastal areas have caused great disasters [
4], which will inevitably affect the safety of maritime traffic activities. The number of ship damages, casualties and direct economic losses have increased year by year, and the cost of supporting safe operations in the shipping industry has suddenly increased. The more than 50,000 ships sailing on global routes consume nearly 500 million tons of fuel per year, and the amount of greenhouse gases such as carbon dioxide emitted by them is astronomical, causing environmental pollution to surrounding oceans, ports and cities [
5].
However, there are still many major challenges ahead. First, in the face of the current resource and environmental crisis, neither the traditional passages nor the minor adjustments should be made. Traditions should be overturned and a sustainable future growth model will be constructed [
6]. Second, technology is always the key to the transformation of human society, and also the main means for the sustainable development of shipping [
7,
8]. A thorough and long-term solution nowadays requires the use of technological innovation to achieve transformation and upgrading more than ever. In view of the opening of Arctic routes, the shipping industry will make full use of Arctic routes for ship transportation to become an inevitable demand and an essential choice [
9]. Not only is it conducive to the energy-saving and efficient development of shipping, but it also increases the options for global shipping routes. At the same time, the restrictions on sea ice also have a certain impact on the safety of ship Arctic navigation. Floating ice at sea has a very prominent impact on the safety of ship navigation, and easily causes ship-ice collision accidents [
10]. In the vast high-latitude waters, the state of floating ice is interrelated, and this association will form a coupling effect on the navigation risks of Arctic ships during long-distance voyages [
11].
The Arctic route has become a new-period waterway connecting eastern Asia/west America to Europe, the normalization of the route selection has received more and more attention, and the maritime traffic in the Arctic waters is becoming more and more common [
12]. For commercial ships, navigation in the Arctic northeast route is close to the continental shelf, and has a low probability of the ship encountering sea ice during the voyage, but has a long voyage time relative to the trans-Arctic route. With the melting of Arctic sea ice [
13], it is the future trend to sail near the edge of the ice shelf in the center Arctic [
14,
15]. Ships moving towards the central area of the Arctic waters will encounter continuous changing sea ice condition. Ship-ice collisions will be a serious threaten to the safety of maritime traffic [
16,
17]. The dynamic risk of maritime traffic in the Arctic under ice conditions is currently a more urgent issue.
When conducting risk reasoning of maritime traffic accidents under the influence of sea ice. Huang simulated the impact of ship-wave-ice interaction on ship-ice collision accident, and predicted the ice impact that ship may encounter when sailing in Arctic waters [
18]. By proposing a new method of numerical simulation, the damage of sea ice to propagation was analyzed in [
19]. Chai provided a reference for ship structure design through statistics of the characteristics of on year ice in Arctic waters [
20,
21]. Such studies focus on the impact of the interaction between sea ice and ship’s structure, leading to ship-ice accidents.
In addition, some scholars have analyzed the ship-ice accident risk mechanism to find the main reason for accidents. When analyzing the risk of maritime traffic in the Gulf of Finland in winter, Valdez Banda analyzed the causes of sea ice formation and found the most common ice conditions that affect maritime traffic safety [
22]. In view of the risk of ship ice besetting accident, Montewka believes that sea ice affects the speed of ship on the one hand, and on the other hand becomes an obstacle on the channel, leading to ice besetting accidents [
23]. Afenyo held the opinion that the failure of sea ice detection technology and the obstruction of sea ice on the channel will lead to ship-ice collision accidents, and analyzed the main reasons leading to ship-ice collision accidents in Arctic waters [
24]. When analyzing the collision accident of maritime traffic in the Arctic ice region, Zhang believes that sea ice would mainly damage the structure of ships [
25]. Fu thought that whether a ship ice besetting accident occurs depends on the effectiveness of a series of technical operations under sea ice conditions, by establishing a ship ice besetting accident event tree model, the severity of the consequences of ice besetting accident in multiple scenarios is analyzed [
26]. Goerlandt [
27] used the ship maneuvering data and environmental data, analyzed the safe distance and safe speed between ships and escort ships in Finnish sea under ice condition. In addition, some scholars analyze the main causes of collision accident through analyze accident reports [
28,
29]. It can be seen that ice conditions have a major impact on ship operation safety, and studies on maritime traffic safety under the influence of ice condition have been carried out in depth from multiple perspectives.
In the current analysis of ship-ice accident risk reasoning, relevant scholars pay a lot of attention to finding key risk factors and their relationship, but, a key issue is overlooked, maritime traffic in the Arctic waters is a typical dynamic process, the association effects of risk factor proposed in research [
30] should also exist in the study of maritime traffic risk assessment. Thus, we propose the dynamic association (DA) effect of risk factor. Focusing on the impact of sea ice on ship Arctic navigation risk, we analyze the ship-ice collision accident risk under sea ice status dynamic association (SDA), which is of positive significance for advancing maritime traffic risk research in Arctic waters.
In the field of maritime traffic risk research, the commonly used analysis methods include fault tree [
31,
32], event tree [
33,
34], analytical hierarchy process method [
35,
36], and Bayesian analysis methods [
37,
38]. Among them, Bayesian analysis methods can effectively combine subjective and objective information and are widely used in ship Arctic navigation risk analysis. Fu established a Bayesian prediction model to predict and analyze the risk of ship ice besetting accidents in Arctic waters [
39]. BAKSH established a Bayesian risk assessment model for three types of maritime traffic accidents: collisions, grounding and founding in Arctic waters [
40]. Khan constructed an object-oriented Bayesian network risk assessment model to analyze the ship-ice collision risk in Arctic waters, and determined the root cause of the collision accident to support ship operation decision-making [
41]. Khan used the dynamic Bayesian analysis method to analyze the main risk factors of the Arctic ship-ice collision accidents [
42]. These studies have proved the advantages of Bayesian networks in the analysis of evidence information. The risk assessment of ship navigation under the SDA effect contains a lot of uncertainty analysis. Therefore, it is suitable to use the mature method of Bayesian analysis to carry out this research.
In the following parts of this study, we plan to establish a ship-ice collision risk analysis model under the SDA effect. The Bayesian network is used to analyze the dynamic change of maritime traffic risk in the Arctic waters. Besides, sea ice monitoring data in the Arctic waters are used to explore the influence of ice conditions on the risk of ship-ice collisions. In
Section 2, we introduce how to perform Bayesian network risk reasoning under SDA. The obtain of relevant data and the calculate of prior probability distribution (PPD) and conditional probability distribution (CPD) in Bayesian risk assessment network are discussed in
Section 3.
Section 4 discusses the changes that SDA effect brings to ship Arctic navigation risk analysis.
Section 5 provides the conclusions of this research effort.
3. Result
3.1. Comparative Analysis of Maritime Traffic Risk
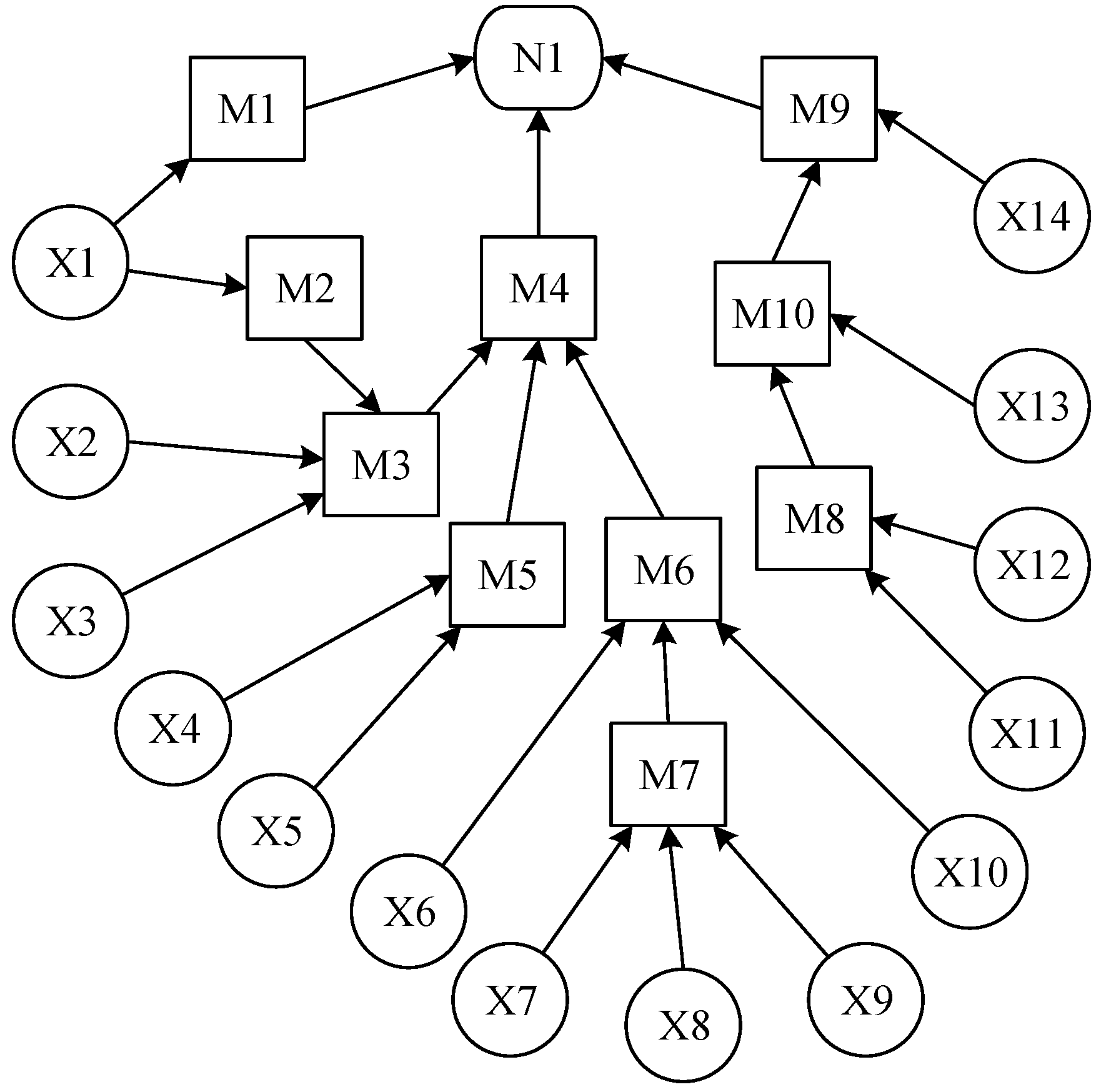
The ship-ice collision accident risk Bayesian network assessment model (AM) in
Figure 1 is used to analyze the impact of SDA on ship-ice collision risk. Besides, the node X1 in AM is deleted, and the node M1 and M2 will change to root node. By giving the PPD of node M1 and M2 to establish a sea ice non-associated control model (CM).
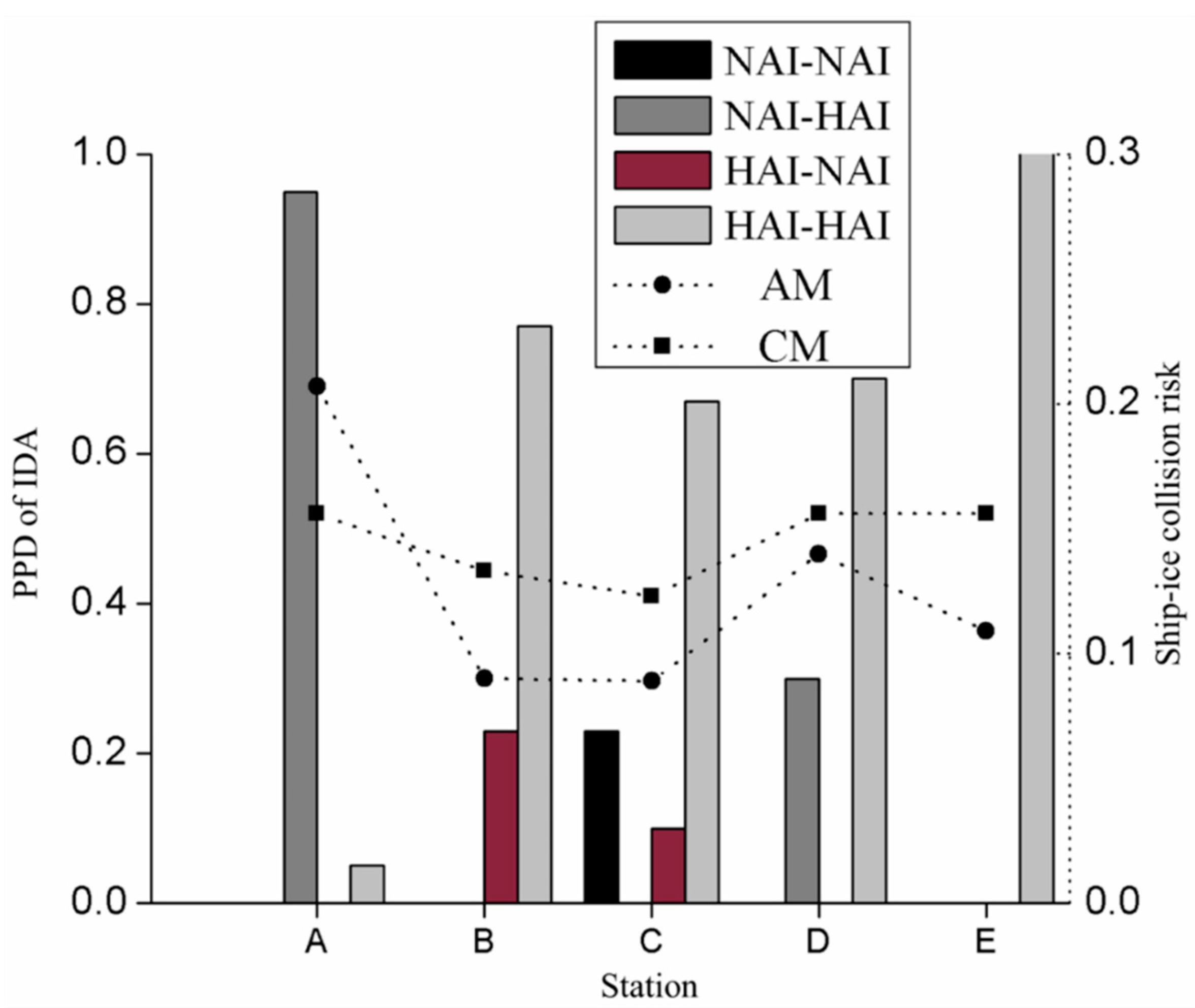
Figure 4 shows the SDA information at the five positions, and the Bayesian network reasoning result of the ship-ice collision risk through running the AM and the CM, respectively.
The probability of ship-ice collision on the selected route is around 0.15. Through the CM, the risk of ship-ice collision accident along the route are 0.16, 0.13, 0.12, 0.16, and 0.16. By using the AM, the risk of ship-ice collision accident are 0.2, 0.09, 0.09, 0.14, and 0.11. The risk change trends calculated by the two models are basically the same, but at the same location, the model analysis results under the SDA are more sensitive to ice condition. At station A, the risk assessment result of the AM is 32.69% higher than that of the CM. At station B, C, D, and E, the risk assessment results of the CM are higher than that of the AM, which are 32.33%, 27.64%, 10.26%, and 30.13%, respectively.
3.2. The Impact of Ice Condition on Maritime Traffic Risk
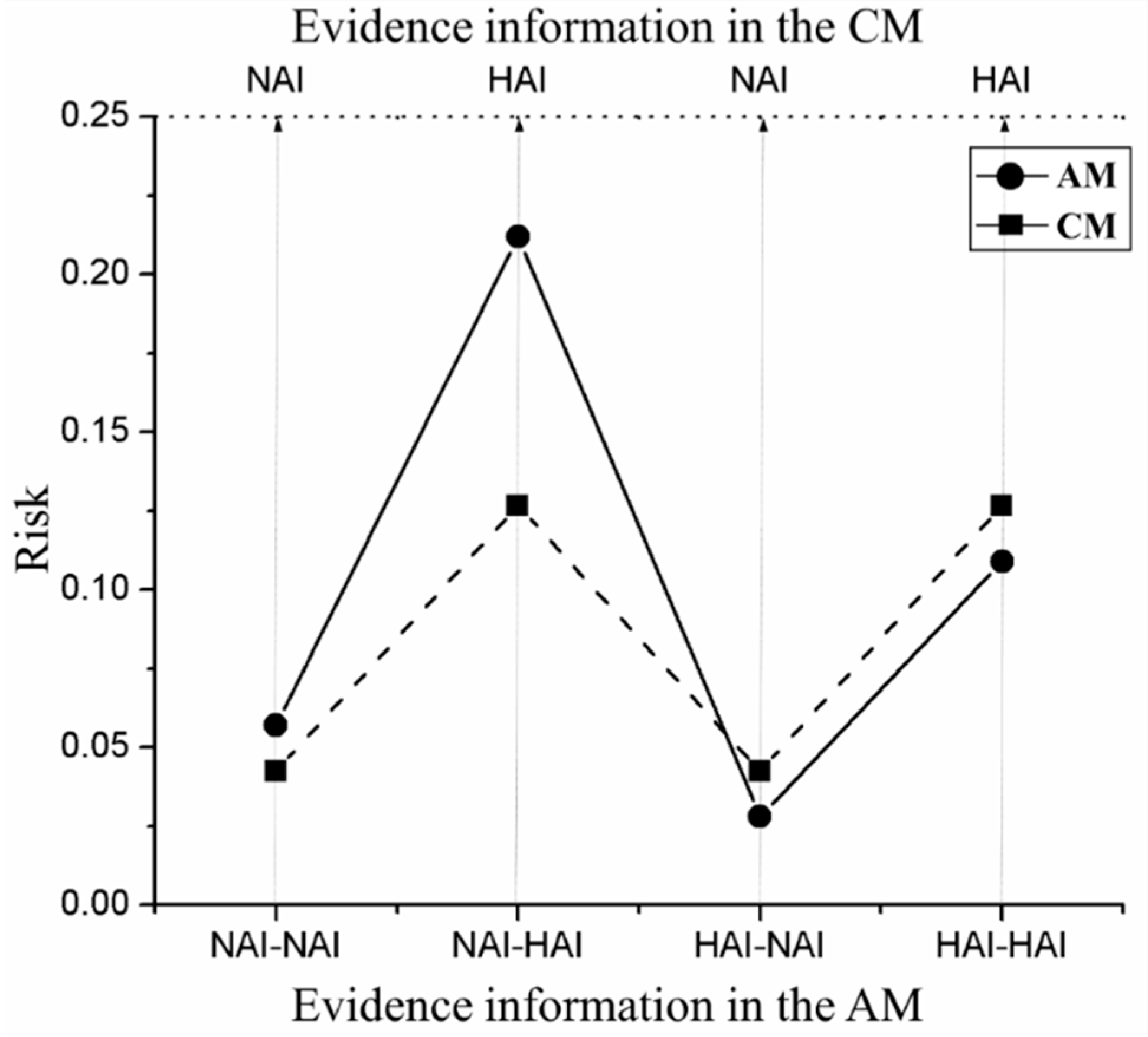
To further explore the difference of risk assessment results between the AM and the CM, the evidence information of SDA in the AM are set as P(NAI-NAI) = 1, P(NAI-HAI) = 1, P(HAI-NAI) = 1, and P(HAI-HAI) = 1, the evidence information in the corresponding CM are P(NAI) = 1, P(HAI) = 1, P(NAI) = 1, and P(HAI) = 1, respectively.
Figure 5 shows the ship-ice collision risk assessment result by updating the model information.
According to the risk assessment results of the AM and CM under the evidence information of SDA’s each state, with or without SDA effect, maritime traffic risk show obvious differences:
- (a)
When the evidence information in AM and CM are P(NAI-NAI) = 1 and P(NAI) = 1, the risk assessment results are basically the same, and the risk assessment result in the AM is slightly higher than those in the CM.
- (b)
When the evidence information in AM and CM are P(NAI-HAI) = 1 and P(HAI) = 1, the risk assessment result in the AM is significantly higher than that in the CM.
- (c)
When the evidence information in AM and CM are P(HAI-NAI) = 1 and P(NAI) = 1, P(HAI-HAI) = 1 and P(HAI) = 1 respectively, the risk assessment results in the AM are lower than those in the CM.
Recalling the ship-ice collision risk assessment results in
Figure 4:
When the ship at station A, the state with a higher probability of SDA is NAI-HAI, which is close to the state of scenario b), so the risk assessment result of the AM is significantly higher than that of the CM.
When the ship is at station B, C, D, and E respectively, the state with a higher probability of SDA is HAI-HAI, which is close to the state of scenario c), so the risk assessment result in the CM is higher than AM.
3.3. Model Validation
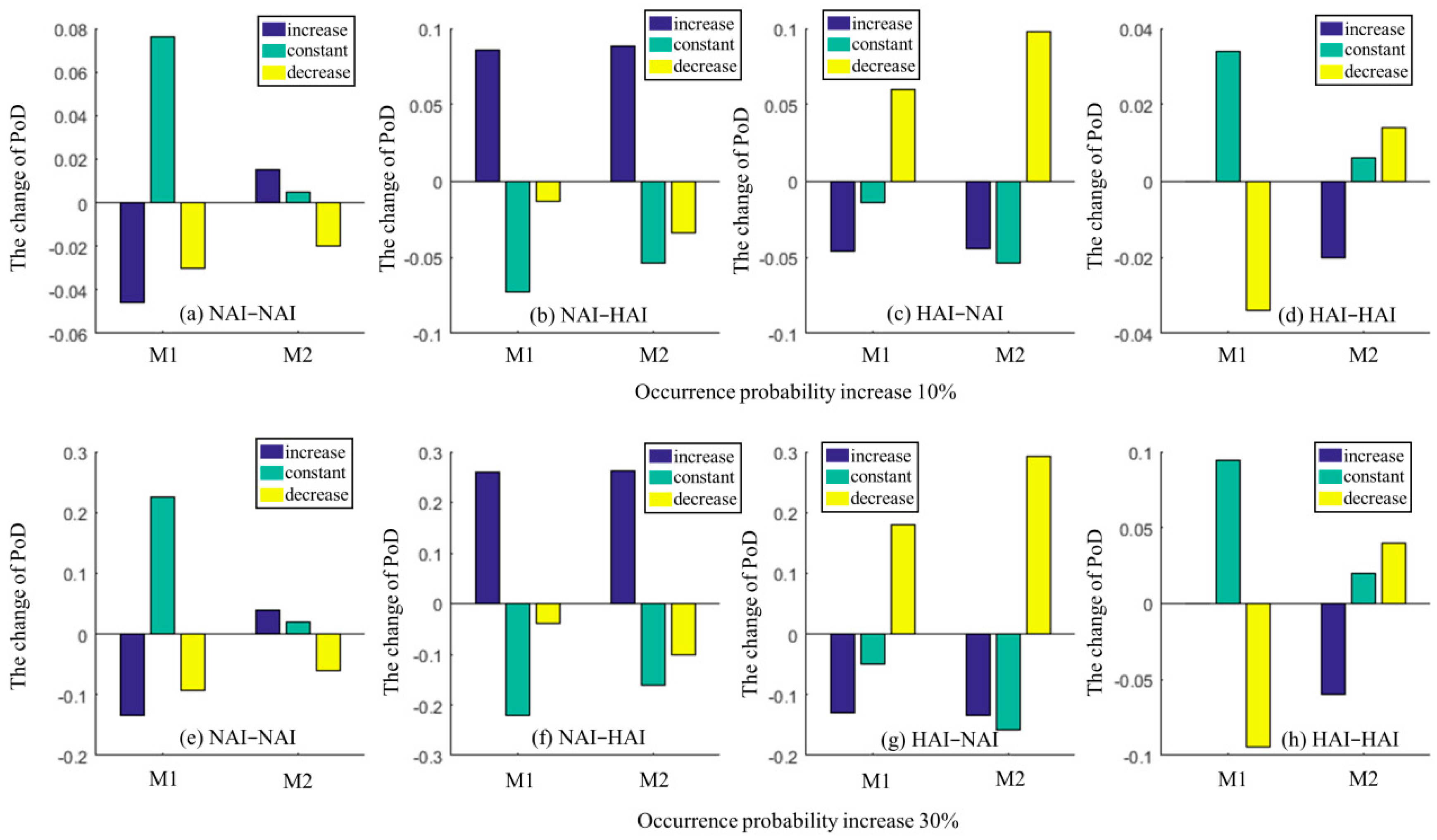
Through increasing the state occurrence probability of SDA’s every state in the AM by 10% and 30% respectively, observe the changes of PoD for each state in M1 and M2 to analyze the impact of SDA on the ship-ice collision risk, the results of PoDs are shown in
Figure 6a–d and
Figure 6e–h respectively.
With the increase in the occurrence probability of NAI-NAI, the occurrence probability of M2 is likely to increase, while the occurrence probability of M1 remains stable, indicating that the vigilance of ship operators will decrease under the continuous state of no ice threat, resulting in a slightly higher navigation risk, but the navigation risk is still far lower than in other states. The increase in the occurrence probability of NAI-HAI will cause the occurrence probability of M1 and M2 to increase at the same time, indicating that the sudden sea ice threat affects navigation safety at the same time on M1 and M2, and ship operators are insufficiently prepared to respond to sudden sea ice threats. When the occurrence probability of state HAI-NAI increases, the occurrence probability of M1 and M2 will decrease instead, indicating that the sudden disappearance of sea ice threat will have a negative effect on M1 and M2, and ship operators are still on sea ice threat alert status. Under the increase in the occurrence probability of HAI-HAI, the occurrence probability of M1 remains unchanged, but the occurrence probability of M2 is likely to decrease, indicating that when the sea ice threat continues to exist, ship operators will maintain the sea ice threat alert state, which will reduce the maritime traffic risk. However, the overall navigation risk under HAI-HAI of is still high.
The ship-ice collision risk analysis under the SDA can reflect the influence of the status change of human on the navigation risk under the change of SIC. During the navigation, it needs to be extra vigilant of the SDA status of NAI-HAI and HAI-HAI.
4. Discussion
In relevant studies, researchers often pay attention to risk factors’ relationships and analyze risk factors’ comprehensive effects through different methods and models to assess maritime traffic risk [
52,
53], but maritime traffic is a dynamic process, and humans on board continuously adapt to various maritime traffic environments during the navigation process, so, their adaptability to the state of risk factors will also change accordingly. This means that even the same risk factor status, under different association modes, will have different effects on maritime traffic risks. Therefore, we propose a DA effect of risk factor’s state, in which we pay attention to the impact of risk factor’s state changes with time on maritime traffic risk. To assess the maritime traffic risk in Arctic waters under DA effect, based on the ship-ice collision risk behavior under the influence of dynamic sea ice, we establish a Bayesian network model of ship-ice collision risk with multi-factor coupling to explore the Impact of SDA to ship-ice collision accident risk. Combined with the SIC sample data of the trans-Arctic route in Arctic waters, the proposed model reveals the general regulation of the dynamic risk for ship Arctic navigation under SIC. Under the DA effect of risk factor’s state, the perception of maritime traffic risk has also changed. Results show that the AM’s response to different SDA effects is robust, and the SDA effect has a positive impact on the manifestations of human error and serious ice condition. The ship-ice collision risk under SIC is formed through SDA.
The impact of association effects on driving is more in road traffic safety research. Because in-vehicle information systems (IVIS) are widely used in vehicles, drivers continuous use the IVIS during driving will form behavioral adaptation effects [
54]. Some drivers perform risky driving because of excessive participation in IVIS during driving, but, some drivers respond positively to the safety assistance in IVIS to improve driving safety. Relevant research found that under an advanced driver assistance system (ADAS), drivers would stop at intersections less frequently, and the speed would increase, which is not conducive to driving safety [
55]. These studies all show that drivers will display behavioral adaptation for consecutive events, which will have a positive or negative impact on driving safety. According to the phenomenon that the drivers appear in the driving process, we propose the influence of the risk factor’s DA effect on the maritime traffic risk, which means that the navigation risk is not only affected by the risk factors of its current state, but also formed by the cumulative effect of the risk factors in the time series.
Based on this, we analyzed the impact of SDA effect on ship-ice collision accidents in Arctic waters through the Bayesian risk assessment model. In related research, the conclusion generally believes that SIC is the main factor affecting navigation risk [
35,
56]. In the maritime traffic risk assessment results of CM in
Figure 5 also verify the rationality of this statement. However, through the further in-depth study of this research, we found that the impact of SIC on maritime traffic risk is not as simple as the presence of sea ice threat cause the high navigation risk, and the absence of sea ice threat lead the low navigation risk. Through the influence of SDA status on the ship-ice collision accident risk in
Figure 5, and the influence of SDA status on human error in
Figure 6, we can find that the SDA effect of NAI-NAI and HAI-NAI both indicate that the current state of the ship is no sea ice threat, but the risk assessment result of the ship-ice collision accident under the association state NAI-NAI is higher than the association state HAI-NAI. This is mainly due to the fact that in the NAI-NAI state, ship operators have adapted to the navigation environment without sea ice threats, thereby increasing the probability of human error and leading to the increase of navigation risk. The SDA effect NAI-HAI and HAI-HAI both indicate that the current state of the ship is threatened by sea ice, but the risk assessment result of ship-ice collision accident in the association state NAI-HAI is significantly higher than that in the association state HAI-HAI. The main reason is that in the state of NAI-HAI, ship operators have adapted to the navigation environment without sea ice threats, and are insufficiently prepared for sudden sea ice threats, which leads to a high growth in navigation risk.
In this study, we calculated the occurrence probability of risk nodes X1 and M1 in the ship-ice collision accident risk Bayesian network assessment model based on the sea ice concentration data monitored by satellites. Limited by the availability of data related to maritime traffic in Arctic waters, the conditional probability of node M2 is obtained through expert knowledge, and the prior probability of other nodes is obtained through reference to other researches and expert knowledge judgments, which may have a certain impact on the objectivity of the model assessment results. However, through model testing, we found that the constructed ship-ice collision accident assessment model for maritime traffic in Arctic waters is highly sensitive. With the addition of more monitoring data, the constructed model can be well applied to guide ships navigate in Arctic waters under ice conditions.
Through this research, we apply the proposed DA effect of risk factors to maritime traffic risk assessment in Arctic waters. With the risk analysis of ship-ice collision accidents in Arctic waters under the influence of DA effect, we recognize that in a ship-ice collision accident, the threat of SIC will affect the ship, and the DA effect produced by SIC will affect the adaptation of ship operators. Therefore, maritime traffic risks in Arctic waters are complex and volatile. The SDA effect has a positive effect on our further understanding of the causes of ship-ice collisions in Arctic waters. In order to effectively reduce the risk of ships navigate in Arctic waters, the ship management department can focus on training crews to maintain a good mental state in conducting crew training for Arctic navigation, so as to overcome the adaptability that occurs during maritime traffic practice.
5. Conclusions
This paper has argued that maritime traffic risk is caused by the dynamic association (DA) effect of the risk factor’s state in the time series. Bayesian networks can obtain the inference model of risk forming factors through parameter learning and structure learning, and the risk decision-making can be optimized through the new state design of risk factor nodes. Based on the Bayesian network analysis method, the logical relationship between factors can be reflected, and the impact of DA effect can be expressed. The establishment of the Bayesian network model for the risk assessment of ship-ice collision accidents in Arctic waters is under the influence of sea ice status dynamic association (SDA) effect. Through Bayesian network reasoning, different forms of SDA have different threats to the occurrence possibility of human error and serious ice condition. The SDA is more obvious in the form of “No Adverse Impact (NAI)-Have Adverse Impact (HAI)” and “Have Adverse Impact (HAI)-Have Adverse Impact (HAI)”.
Objectively understanding risks and analyzing their causes are an important part of realizing risk prevention. This study has shown that on the basis of analyzing the logical relationship between risk factors of the ship-ice collision accident, and introducing the DA effect into the maritime traffic risk assessment model, we have a deeper understanding of the cause of the ship-ice collision accident risk, which will promote the discovery of the objective regulations of maritime traffic risk changes in Arctic waters. Through the new understanding of maritime traffic risks in Arctic waters, when carrying out relevant crew safety operation training, the crew can be targeted to realize that they will have adaptability during Arctic navigation operations, and then they can actively overcome them psychologically to achieve the improve of maritime traffic safety.
A limitation of this study is that the SDA effect of sea ice concentration (SIC) considered in this study are only two consecutive days in the discrete state (SIC state of the previous day on the current day) and only the impact of SDA on maritime traffic risk was considered. maritime traffic is a continuous process and there will be multiple risk factors that have DA effects, so the DA effect in maritime traffic risk assessment model should also be continuous repeated in multiple times and risk factors. In the next study, it is necessary to consider the impact of the cumulative association effect produced by the continuous changes of multiple risk factors in the time series on the maritime traffic risk.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}