Deep Learning Predictor for Sustainable Precision Agriculture Based on Internet of Things System

 ,
,  ,
,
Abstract
:1. Introduction
- (1)
- Trend component: This refers to the main trend direction of temperature data. This part often includes the trend of linear growth and decline. The trend component reflects the changes of temperature over a long period of time.
- (2)
- Period components per day: The temperature data have obvious period characteristics in 1 day; that is, the value during the day is higher and that at night is lower.
- (3)
- Period components per year: The temperature data have another period in 1 year, in which the temperature cycle changes in spring, summer, autumn, and winter.
- (4)
- Residual component: This refers to the remaining part of the original data minus the trend and period components and usually consists of complex nonlinear element and noise.
- (1)
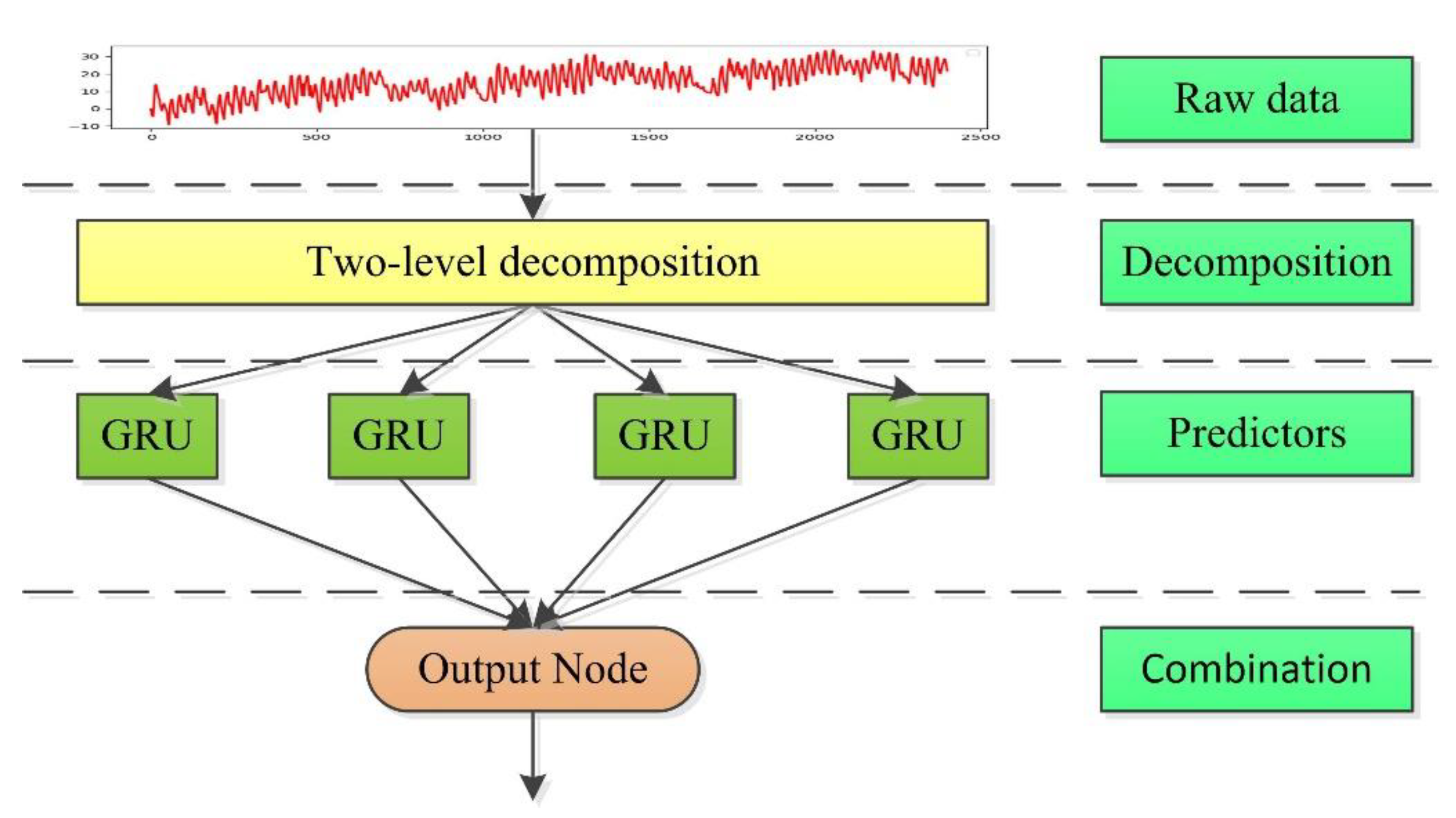
- Based on the characteristics of weather data, we decomposed the data with sequential two-level structure to find out its periodicity of per day and per year. Comparing with [26,27,28], the proposed two-level decomposition structure can more effectively extract the periodic features of weather data, simplify the complexity of decomposition components, and improve the performance of the final prediction results;
- (2)
- We present a general prediction framework for the IoT system that obtains accurate prediction of weather information, in which sub-predictors are designed based on four GRUs for the decomposed trend, periods, and residual components. Using the pick-up-data method, the input and output dimension was reduced to obtain long-term prediction for the following 30 days, and by expanding the prediction of the next day, the sub-prediction results were combined to obtain the accurate hourly prediction of temperature and humidity for the next day.
2. Research Objectives and Data Description
- (1)
- Medium-term prediction: Providing accurate predictions of temperature and humidity for the next 24 h;
- (2)
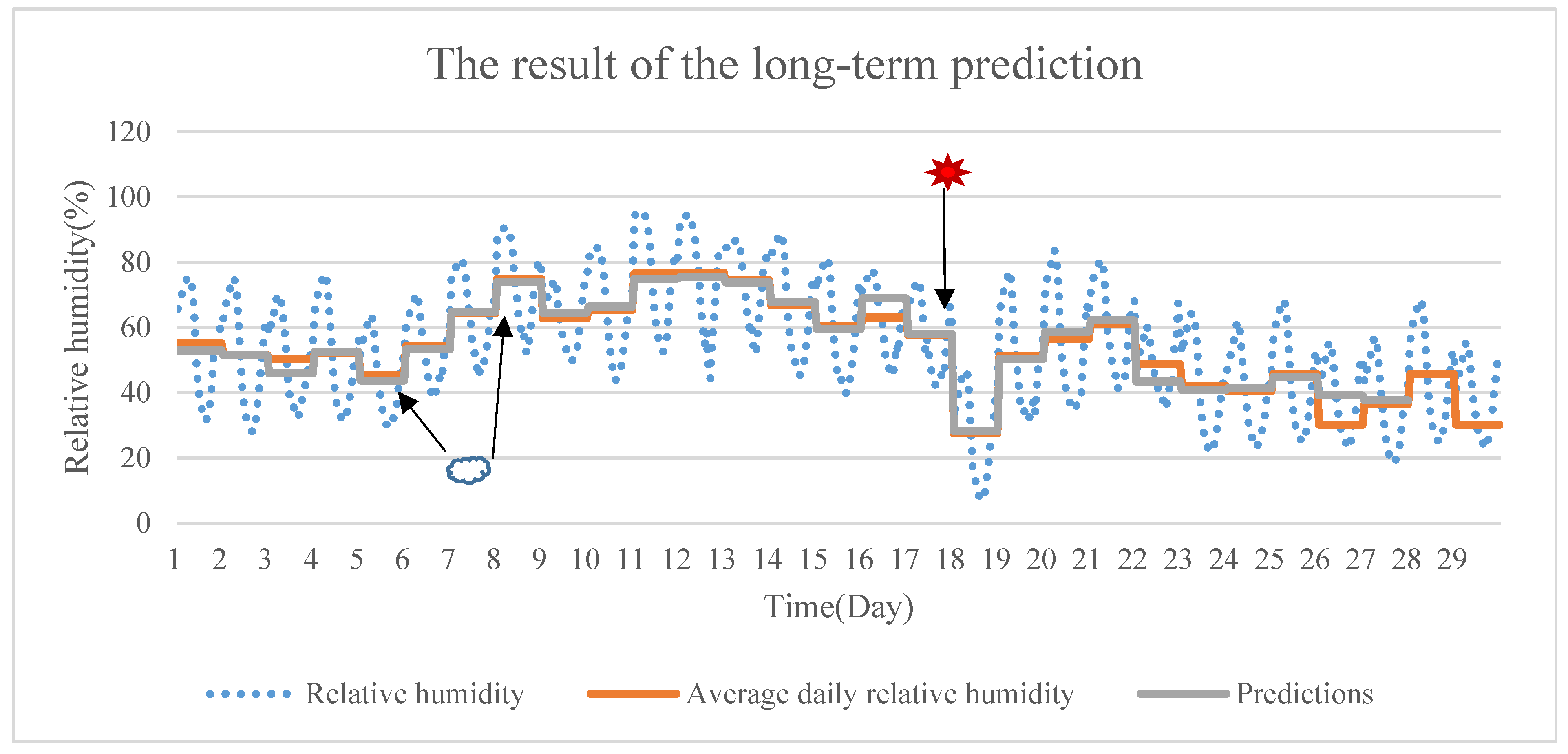
- Long-term prediction: Providing average daily temperature and humidity for the next 30 days.
3. Distributed Decomposition Model
3.1. Model Framework
3.2. Sequential Two-Level Decomposition
3.2.1. First-Level Decomposition
- (1)
- Set the period for the first-level decomposition as 1 day, i.e., 24 h. For the data used in this study, that means 24 samples. Calculate the number of periods by , where is described to round up .
- (2)
- Extract the trend by the mean regression method to reflect the overall trend of the time series data.
- (3)
- Extract the period component of the data by the following two steps: Calculate to get the initial period component firstly. Select the data points from 1st to th in , add the data at the same time point, and then divide by to obtain one period curve, and then copy it times and consider the different of the and to obtain the period component with points.
- (4)
- Extract the residual component by .
3.2.2. Second-Level Decomposition
- (1)
- Set the period for the second-level decomposition as 1 year, i.e., h. Then calculate the number of period components by , where is described to round up .
- (2)
- Extract the trend by the mean regression method to reflect the overall trend of the time series data.
- (3)
- Extract the period component of the data by the following two steps: Calculate to get the initial period component firstly. Select the data points from 1st to th in , add the data at the same time point, and then divide by to obtain one period curve and then copy it times to obtain the component . Calculate the mean of each 24 h’ to substitute the former point data, and obtain the period component with points.
- (4)
- Extract the residual component by .
3.3. Deep Learning Predictor
3.3.1. Sub-predictor GRU
3.3.2. Long-term Prediction
3.3.3. Medium-term Prediction
4. Experiment Results and Discussion
4.1. Experimental Setup
4.2. The Prediction Results
4.3. Comparing with Other Predictors
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Vecchio, Y.; Agnusdei, G.P.; Miglietta, P.P.; Capitanio, F. Adoption of Precision Farming Tools: The Case of Italian Farmers. Int. J. Environ. Res. Public Health 2020, 17, 869. [Google Scholar] [CrossRef] [Green Version]
- Fusco, G.; Miglietta, P.P.; Porrini, D. How Drought Affects Agricultural Insurance Policies: The Case of Italy. J. Sustain. Dev. 2018, 1111, 1–13. [Google Scholar] [CrossRef]
- Porrini, D.; Fusco, G.; Miglietta, P.P. Post-adversities recovery and profitability: The case of Italian farmers. Int. J. Environ. Res. Public Health 2019, 16, 3189. [Google Scholar] [CrossRef] [Green Version]
- Muangprathub, J.; Boonnam, N.; Kajornkasirat, S.; Lekbangpong, N.; Wanichsombat, A.; Nillaor, P. IoT and agriculture data analysis for smart farm. Comput. Electron. Agric. 2019, 156, 467–474. [Google Scholar] [CrossRef]
- Suciu, G.; Marcu, I.; Balaceanu, C.; Dobrea, M.; Botezat, E. Efficient IoT System for Precision Agriculture. In Proceedings of the 2019 15th International Conference on Engineering of Modern Electric Systems (EMES), Oradea, Romania, 13–14 June 2019; Volume 13–14, pp. 173–176. [Google Scholar]
- Zhao, Z.; Yao, P.; Wang, X.; Xu, J.; Wang, L.; Yu, J. Reliable flight performance assessment of multirotor based on interacting multiple model particle filter and health degree. Chin. J. Aeronaut. 2019, 32, 444–453. [Google Scholar] [CrossRef]
- Keswani, B.; Mohapatra, A.G.; Mohanty, A.; Khanna, A.; Rodrigues, J.J.P.C.; Gupta, D.; Albuquerque, V.H.C. Adapting weather conditions based IoT enabled smart irrigation technique in precision agriculture mechanisms. Neural Comput. Appl. 2019, 3131, 277–292. [Google Scholar] [CrossRef]
- Mohammadi, M.; Al-Fuqaha, A.; Sorour, S.; Guizani, M. Deep learning for IoT big data and streaming analytics: A survey. IEEE Commun. Surv. Tutor. 2018, 20, 2923–2960. [Google Scholar] [CrossRef] [Green Version]
- Bai, Y.T.; Jin, X.B.; Wang, X.Y.; Wang, X.K.; Xu, J.P. Dynamic correlation analysis method of air pollutants in spatio-temporal analysis. Int. J. Environ. Res. Public Health 2020, 17, 360. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Benmouiza, K.; Cheknane, A. Small-scale solar radiation forecasting using ARMA and nonlinear autoregressive neural network models. Theor. Appl. Climatol. 2016, 124, 945–958. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, T.; Jin, X.; Xu, J.; Wang, X.; Zhang, H.; Yu, J.; Sun, Q.; Zhao, Z.; Xie, Y. An approach of recursive timing deep belief network for algal bloom forecasting. Neural Comput. Appl. 2020, 32, 163–171. [Google Scholar] [CrossRef]
- Bai, Y.; Jin, X.; Wang, X.; Su, T.; Kong, J.; Lu, Y. Compound autoregressive network for prediction of multivariate time series. Complexity 2019, 2019, 9107167. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, T.; Wang, X.; Jin, X.; Xu, J.; Yu, J.; Zhang, H.; Zhao, Z. An approach of improved Multivariate Timing-Random Deep Belief Net modelling for algal bloom prediction. Neural Comput. Appl. 2019, 177, 130–138. [Google Scholar] [CrossRef]
- Mao, J.D.; Zhang, X.J.; Li, J. Wind Power Forecasting Based on the BP Neural Network. Appl. Mech. Mater. 2013, 341–342, 1303–1307. [Google Scholar] [CrossRef] [Green Version]
- Smits, G.F.; Jordaan, E.M. Improved SVM Regression Using Mixtures of Kernels. In Proceedings of the 2002 International Joint Conference on Neural Networks, Honolulu, HI, USA, 12–17 May 2002; IEEE: Piscataway, NJ, USA; Volume 3, pp. 2785–2790. [Google Scholar]
- Xu, X.; Ren, W. Application of a Hybrid Model Based on Echo State Network and Improved Particle Swarm Optimization in PM2. 5 Concentration Forecasting: A Case Study of Beijing, China. Sustainability 2019, 11, 3096. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.Y.; Kong, J.L.; Jin, X.B.; Wang, X.Y.; Su, T.L.; Zuo, M. Cropdeep: The crop vision dataset for deep-learning-based classification and detection in precision agriculture. Sensors 2019, 19, 1058. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, J.; Rahmatizadeh, R.; Boloni, L.; Bölöni, L.; Turgut, D. Real-Time Prediction of Taxi Demand Using Recurrent Neural Networks. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2572–2581. [Google Scholar] [CrossRef]
- Sakar, C.O.; Polat, S.O.; Katircioglu, M.; Kastro, Y. Real-time prediction of online shoppers’ purchasing intention using multilayer perceptron and LSTM recurrent neural networks. Neural Comput. Appl. 2019, 31, 6893–6908. [Google Scholar] [CrossRef]
- Che, Z.; Purushotham, S.; Cho, K.; Sontag, D.; Liu, Y. Recurrent Neural Networks for Multivariate Time Series with Missing Values. Sci. Rep. 2018, 8, 6085. [Google Scholar] [CrossRef] [Green Version]
- Yao, Y.; Huang, Z. Bi-directional LSTM Recurrent Neural Network for Chinese Word Segmentation. In Lecture Notes in Computer Science, Proceedings of the ICONIP 2016 Neural Information Processing, Kyoto, Japan, 16–21 October 2016; Hirose, A., Ozawa, S., Doya, K., Ikeda, K., Lee, M., Liu, D., Eds.; Springer: Cham, Switzerland, 2016; Volume 9950. [Google Scholar]
- Tang, Y.; Huang, Y.; Wu, Z.; Meng, H.; Xu, M.X.; Cai, L.H. Question Detection from Acoustic Features Using Recurrent Neural Network with Gated Recurrent Unit. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 19 May 2016; IEEE: Piscataway, NJ, USA. [Google Scholar]
- Chung, J.; Gulcehre, C.; Cho, K.H.; Bengio, Y. Empirical evaluation of gated recurrent neural networks on sequence modeling. arXiv 2014, arXiv:1412.3555. [Google Scholar]
- Jin, X.; Yang, N.; Wang, X.; Bai, Y.; Su, T.; Kong, J. Integrated predictor based on decomposition mechanism for PM2. 5 long-term prediction. Appl. Sci. 2019, 9, 4533. [Google Scholar] [CrossRef] [Green Version]
- García-Mozo, H.; Oteros, J.A.; Galán, C. Impact of land cover changes and climate on the main airborne pollen types in Southern Spain. Sci. Total Environ. 2016, 548, 221–228. [Google Scholar] [CrossRef] [PubMed]
- Rojo, J.; Rivero, R.; Romero-Morte, J.; Fernández-González, F.; Pérez-Badia, R. Modeling pollen time series using seasonal-trend decomposition procedure based on LOESS smoothing. Int. J. Biometeorol. 2017, 61, 335–348. [Google Scholar] [CrossRef] [PubMed]
- Ming, F.; Yang, Y.X.; Zeng, A.M.; Jing, Y.F. Analysis of seasonal signals and long-term trends in the height time series of IGS sites in China. Sci. China Earth Sci. 2016, 59, 1283–1291. [Google Scholar] [CrossRef]
- Qin, L.; Li, W.; Li, S. Effective passenger flow forecasting using STL and ESN based on two improvement strategies. Neurocomputing 2019, 356, 244–256. [Google Scholar] [CrossRef]
- Yang, W.; Zuo, W.; Cui, B. Detecting malicious urls via a keyword-based convolutional gated-recurrent-unit neural network. IEEE Access 2019, 7, 29891–29900. [Google Scholar] [CrossRef]
- Ding, F.; Xu, L.; Meng, D.; Jin, X.-B.; Alsaedi, A.; Hayat, T. Gradient estimation algorithms for the parameter identification of bilinear systems using the auxiliary model. J. Comput. Appl. Math. 2020, 369, 112575. [Google Scholar] [CrossRef]
- Cui, T.; Ding, F.; Jin, X.; Alsaedi, A.; Hayat, T. Joint Multi-innovation Recursive Extended Least Squares Parameter and State Estimation for a Class of State-space Systems. Int. J. Control Autom. Syst. 2020, 18, 1–13. [Google Scholar] [CrossRef]
- Ding, F.; Lv, L.; Pan, J.; Wan, X.; Jin, X.-B. Two-stage Gradient-based Iterative Estimation Methods for Controlled Autoregressive Systems Using the Measurement Data. Int. J. Control Autom. Syst. 2020, 18, 1–11. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, Y.; Zhao, Z.; Wang, L.; Xu, J.; Yu, J. A novel water quality mechanism modeling and eutrophication risk assessment method of lakes and reservoirs. Nonlinear Dyn. 2019, 96, 1037–1053. [Google Scholar] [CrossRef]
- Yu, J.; Deng, W.; Zhao, Z.; Wang, X.; Xu, J.; Wang, L.; Sun, Q.; Shen, Z. A hybrid path planning method for an unmanned cruise ship in water quality sampling. IEEE Access 2019, 7, 87127–87140. [Google Scholar] [CrossRef]
- Wang, F.; Su, T.; Jin, X.; Zheng, Y.; Kong, J.; Bai, Y. Indoor Tracking by RFID Fusion with IMU Data. Asian J. Control 2019, 21, 1768–1777. [Google Scholar] [CrossRef]
- Wang, Z.; Jin, X.; Wang, X.; Xu, J.; Bai, Y. Hard decision-based cooperative localization for wireless sensor networks. Sensors 2019, 19, 4665. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Jin, X.; Yang, N.; Wang, X.; Bai, Y.; Su, T.; Kong, J. Deep Hybrid Model Based on EMD with Classification by Frequency Characteristics for Long-Term Air Quality Prediction. Mathematics 2020, 8, 214. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.; Zhou, Y.; Zhao, Z.; Wei, W.; Li, W. Time-Delay System Control Based on an Integration of Active Disturbance Rejection and Modified Twice Optimal Control. IEEE Access 2019, 7, 130734–130744. [Google Scholar] [CrossRef]
- Bai., Y.; Wang, X.; Jin, X. Adaptive filtering for MEMS gyroscope with dynamic noise model. ISA Trans. 2020. [Google Scholar] [CrossRef]
- Bai, Y.; Wang, X.; Jin, X.; Zhao, Z.; Zhang, B. A neuron-based kalman filter with nonlinear autoregressive model. Sensors 2020, 20, 299. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J.S.; Xiao, X.C. Predicting chaotic time series using recurrent neural network. Chin. Phys. Lett. 2000, 17, 88. [Google Scholar] [CrossRef]
- Gers, F.A.; Schraudolph, N.N.; Schmidhuber, J. Learning precise timing with LSTM recurrent networks. J. Mach. Learn. Res. 2002, 3, 115–143. [Google Scholar]
- Kiperwasser, E.; Goldberg, Y. Simple and accurate dependency parsing using bidirectional LSTM feature representations. Trans. Assoc. Comput. Linguist. 2016, 4, 313–327. [Google Scholar] [CrossRef]
- Shen, G.; Tan, Q.; Zhang, H.; Zeng, P.; Xu, J. Deep learning with gated recurrent unit networks for financial sequence predictions. Procedia Comput. Sci. 2018, 131, 895–903. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Data | Output Data | |
|---|---|---|
| 1 | , , ……, | , , ……, |
| 2 | , , ……, | , , ……, |
| 3 | , , ……, | , , ……, |
| ⋮ | ⋮ | ⋮ |
| 600 | , , ……, | , , ……, |
| Input Data | Output Data | |
|---|---|---|
| 1 | , , ……, | , , ……, |
| 2 | , , ……, | , , ……, |
| 3 | , , ……, | , , ……, |
| ⋮ | ⋮ | ⋮ |
| 600 | , , ……, | , , ……, |
| Input Data | Output Data | |
|---|---|---|
| 1 | , , ……, | , , ……, |
| 2 | , , ……, | , , ……, |
| 3 | , , ……, | , , ……, |
| ⋮ | ⋮ | ⋮ |
| 600 | , , ……, | , , ……, |
| Input Data | Output Data | |
|---|---|---|
| 1 | , , ……, | , , ……, |
| 2 | , , ……, | , , ……, |
| 3 | , , ……, | , , ……, |
| ⋮ | ⋮ | ⋮ |
| 600 | , , ……, | , , ……, |
| Model | RMSE of Temperature Predictions | RMSE of Relative Humidity Predictions |
|---|---|---|
| RNN | 2.6682 | 14.0288 |
| LSTM | 2.9781 | 14.2898 |
| BiLSTM | 3.067 | 14.2683 |
| GRU | 3.0043 | 14.5584 |
| STL_RNN | 2.8155 | 13.8921 |
| STL_LSTM | 2.4940 | 13.6023 |
| STL_BiLSTM | 2.6482 | 14.0215 |
| STL_GRU | 2.5581 | 14.2546 |
| The proposed model | 2.4431 | 13.3041 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, X.-B.; Yu, X.-H.; Wang, X.-Y.; Bai, Y.-T.; Su, T.-L.; Kong, J.-L. Deep Learning Predictor for Sustainable Precision Agriculture Based on Internet of Things System. Sustainability 2020, 12, 1433. https://doi.org/10.3390/su12041433
Jin X-B, Yu X-H, Wang X-Y, Bai Y-T, Su T-L, Kong J-L. Deep Learning Predictor for Sustainable Precision Agriculture Based on Internet of Things System. Sustainability. 2020; 12(4):1433. https://doi.org/10.3390/su12041433
Chicago/Turabian StyleJin, Xue-Bo, Xing-Hong Yu, Xiao-Yi Wang, Yu-Ting Bai, Ting-Li Su, and Jian-Lei Kong. 2020. "Deep Learning Predictor for Sustainable Precision Agriculture Based on Internet of Things System" Sustainability 12, no. 4: 1433. https://doi.org/10.3390/su12041433