Generalized Resource-Constrained Critical Path Method to Improve Sustainability in Construction Project Scheduling

Abstract
:1. Introduction
2. Review of RCPM
2.1. Overview
2.2. Serial RCS
2.3. Parallel RCS
2.4. Need for Improvement
3. Generalized Resource-Constrained Critical Path Method
3.1. Overview
3.2. eRCPM Algorithm
4. eRCPM Prototype System
4.1. Overview
4.2. eRCPM Key Processes
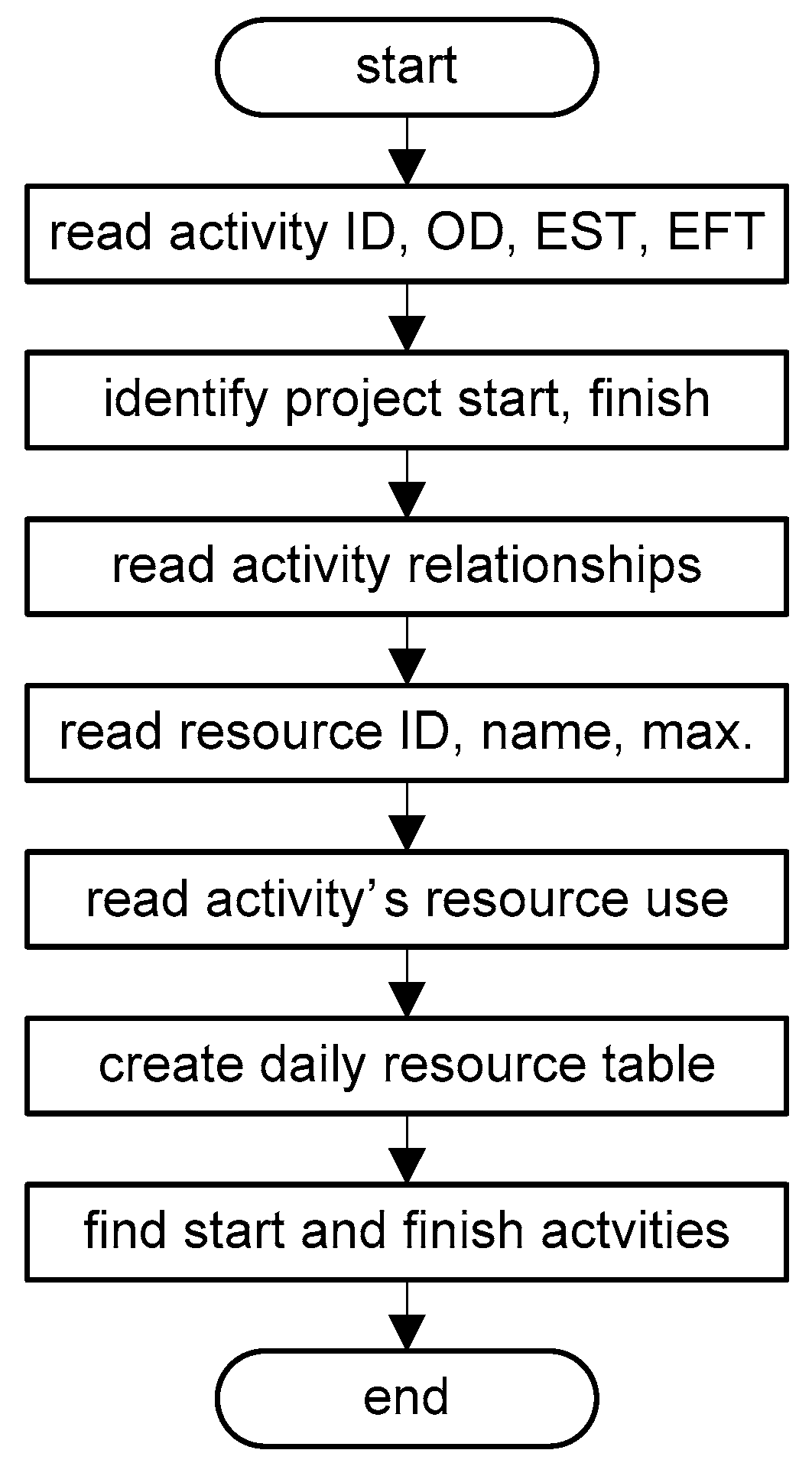
4.2.1. Input Data Processing
- Read ID, original duration (OD), early start time (EST), and early finish time (EFT) of every activity and store them in an array of activities.
- Identify the project start and end times.
- Read the relationship information of each activity and add it to the saved activity in the array of activities to establish the relationship between activities.
- Read the ID, name, and maximum supply of every resource type and store them in an array of resources.
- Read the amount of resources required for each activity and add them to the saved activity in the array of activities.
- Create a daily resource table in a two-dimensional array according to the type of resource and the project period and record the demand for each resource for each date based on the time data and resource demand for each activity.
- Identify start activities that have no predecessor and finish activities that have no successor and store their IDs in a separate array to apply forward and backward passes in steps 1 to 3.
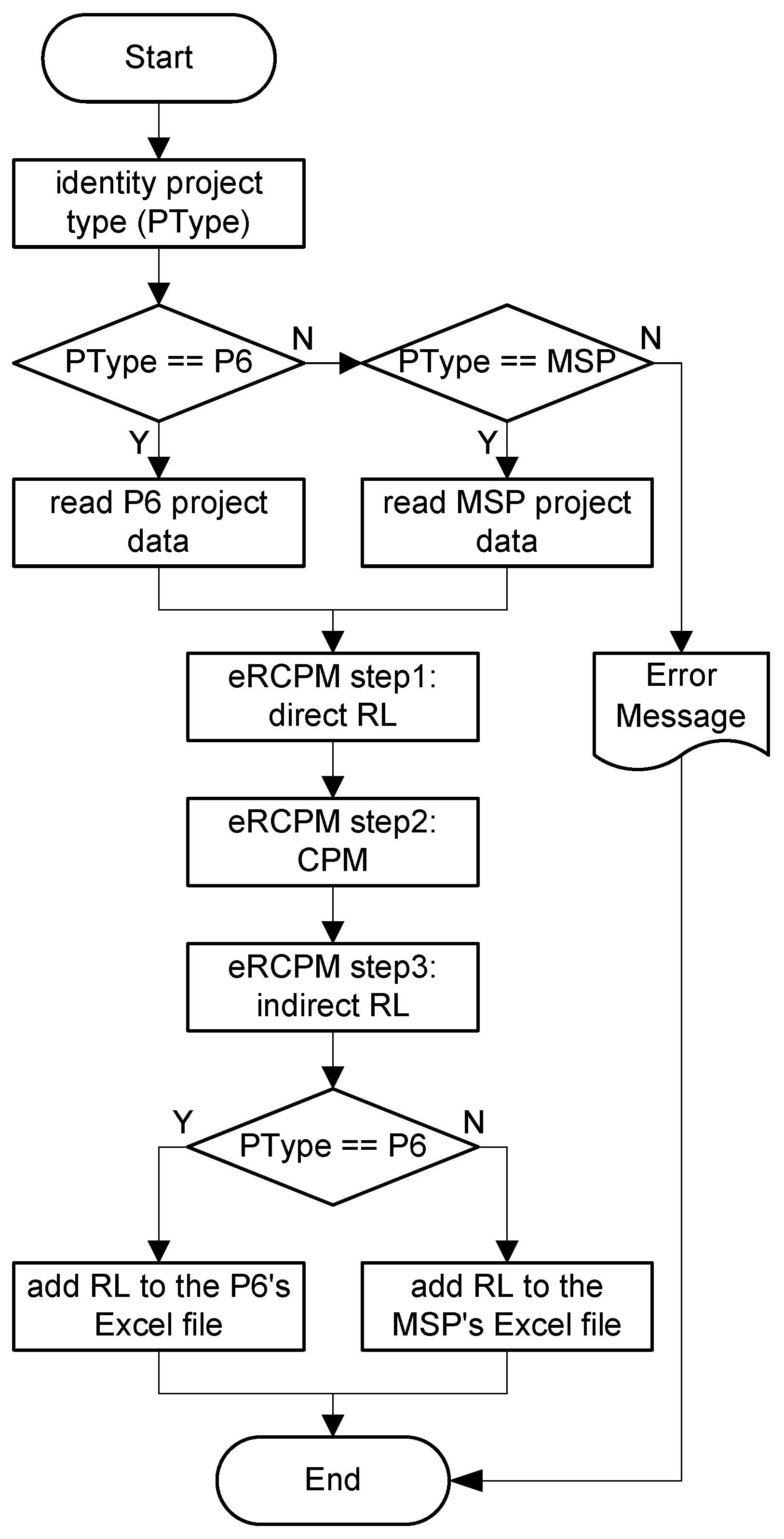
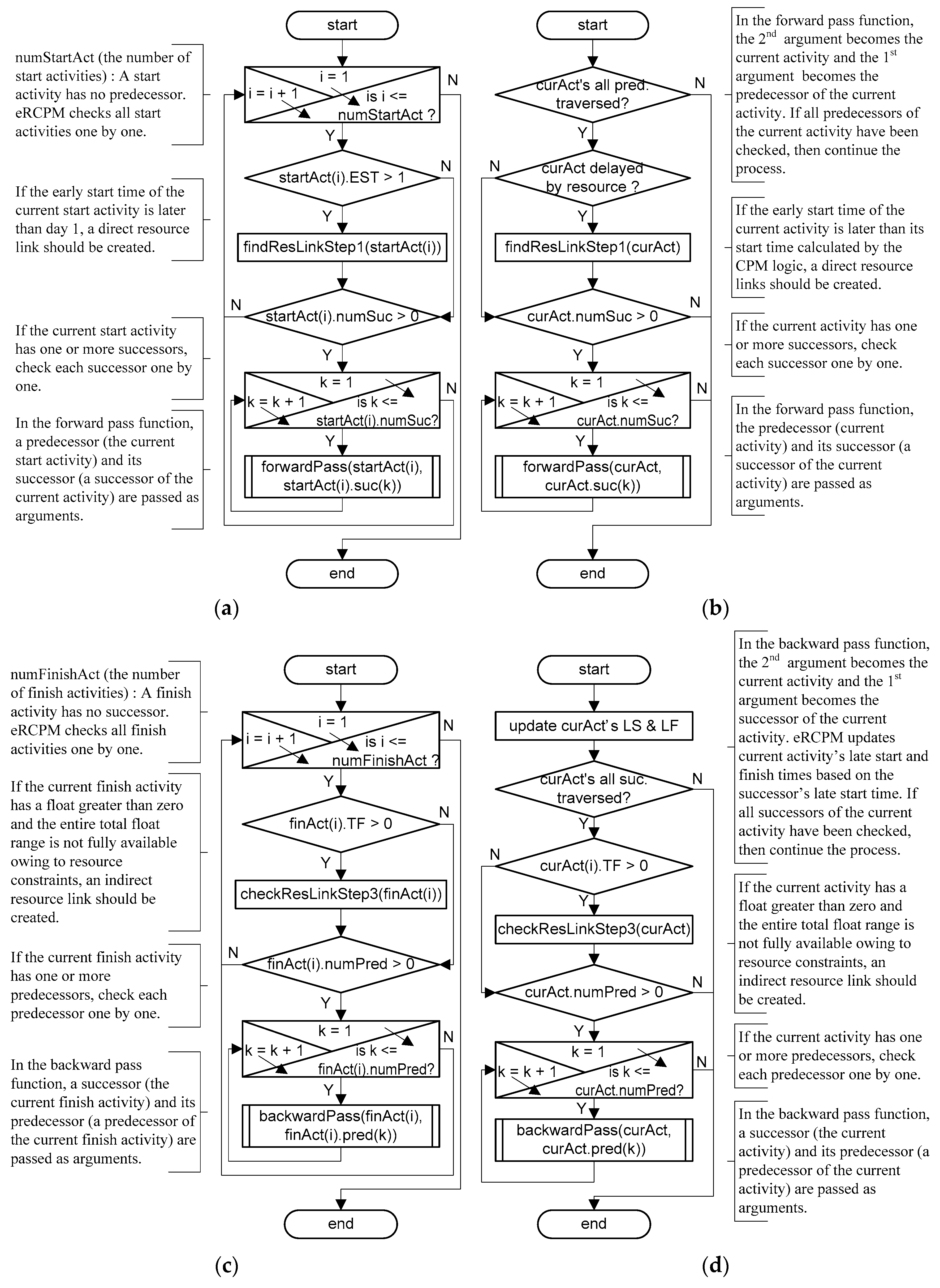
4.2.2. Step 1: Direct Resource Link
4.2.3. Step 3: Indirect Resource Link
5. eRCPM System Demonstration
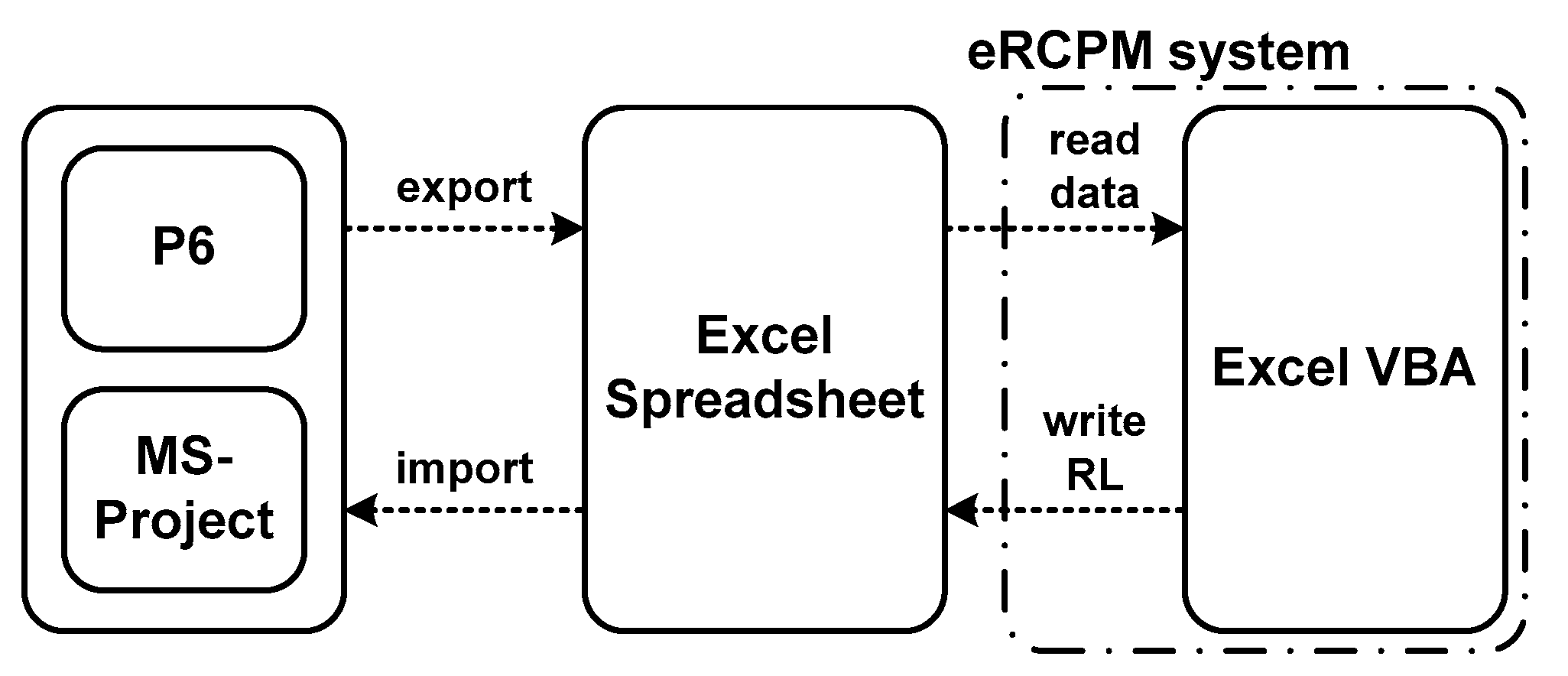
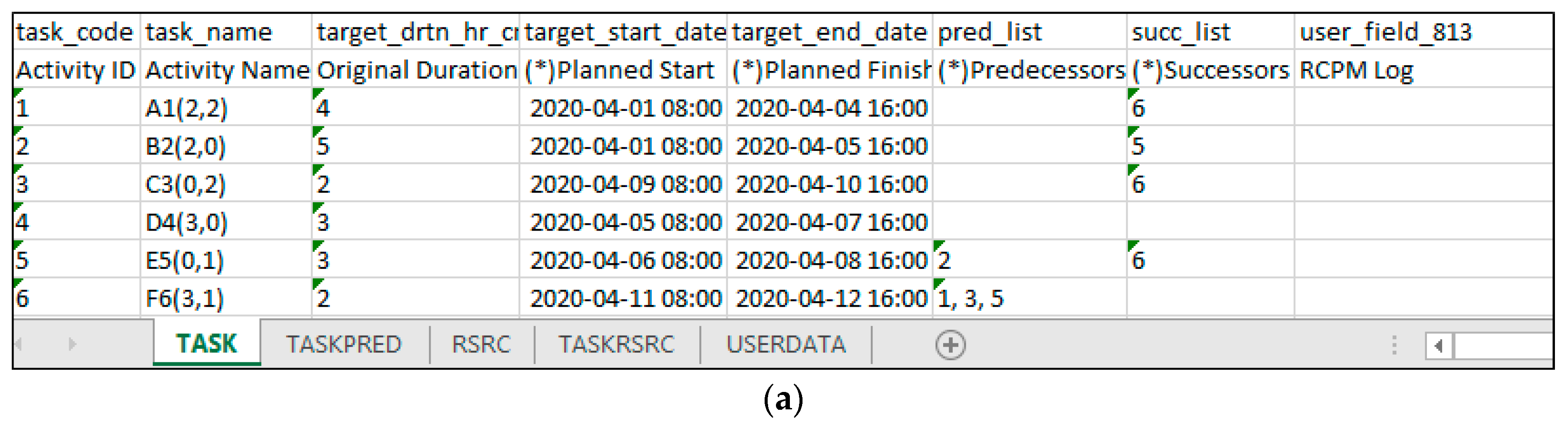
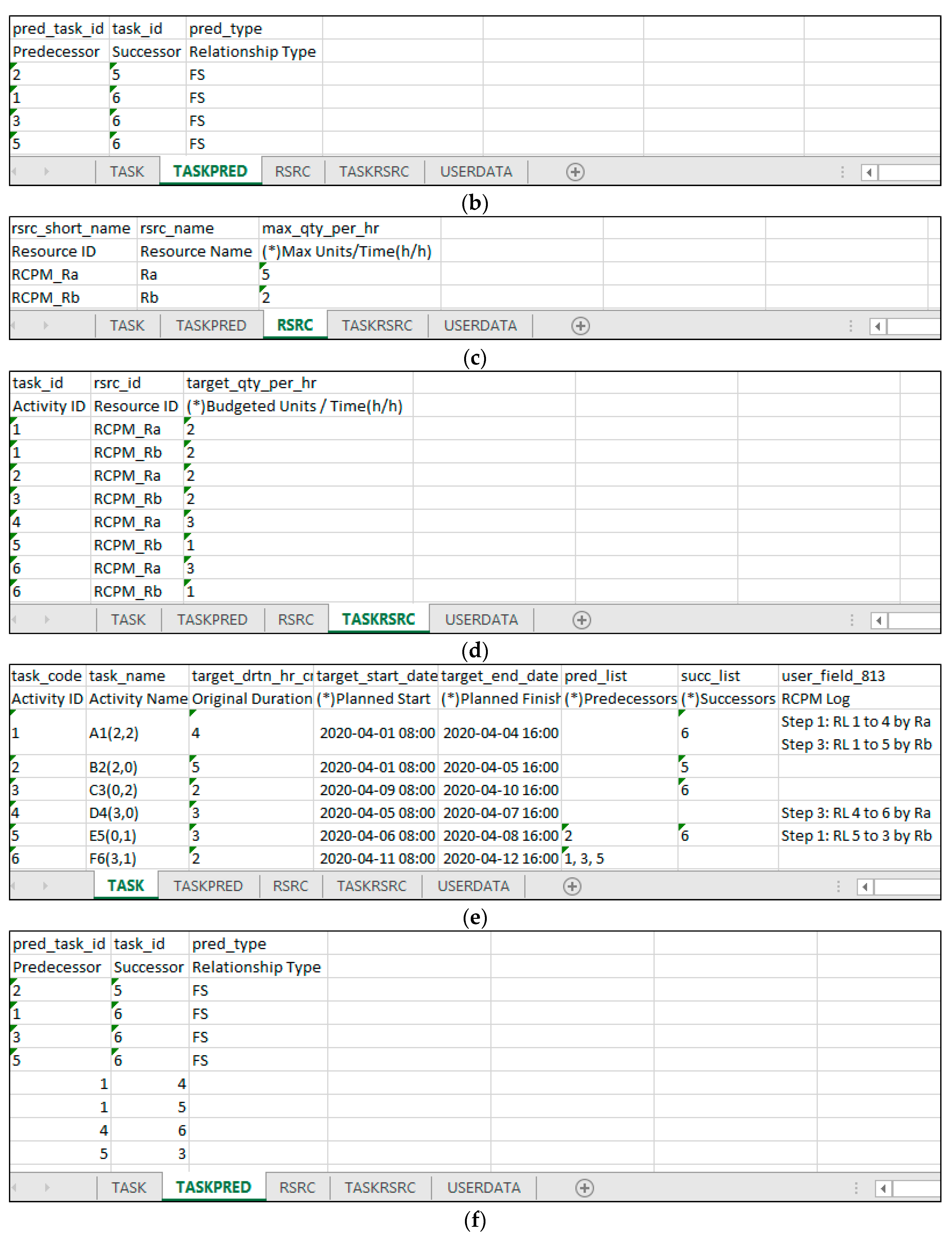
5.1. Export from P6 and MSP
5.2. P6 Example
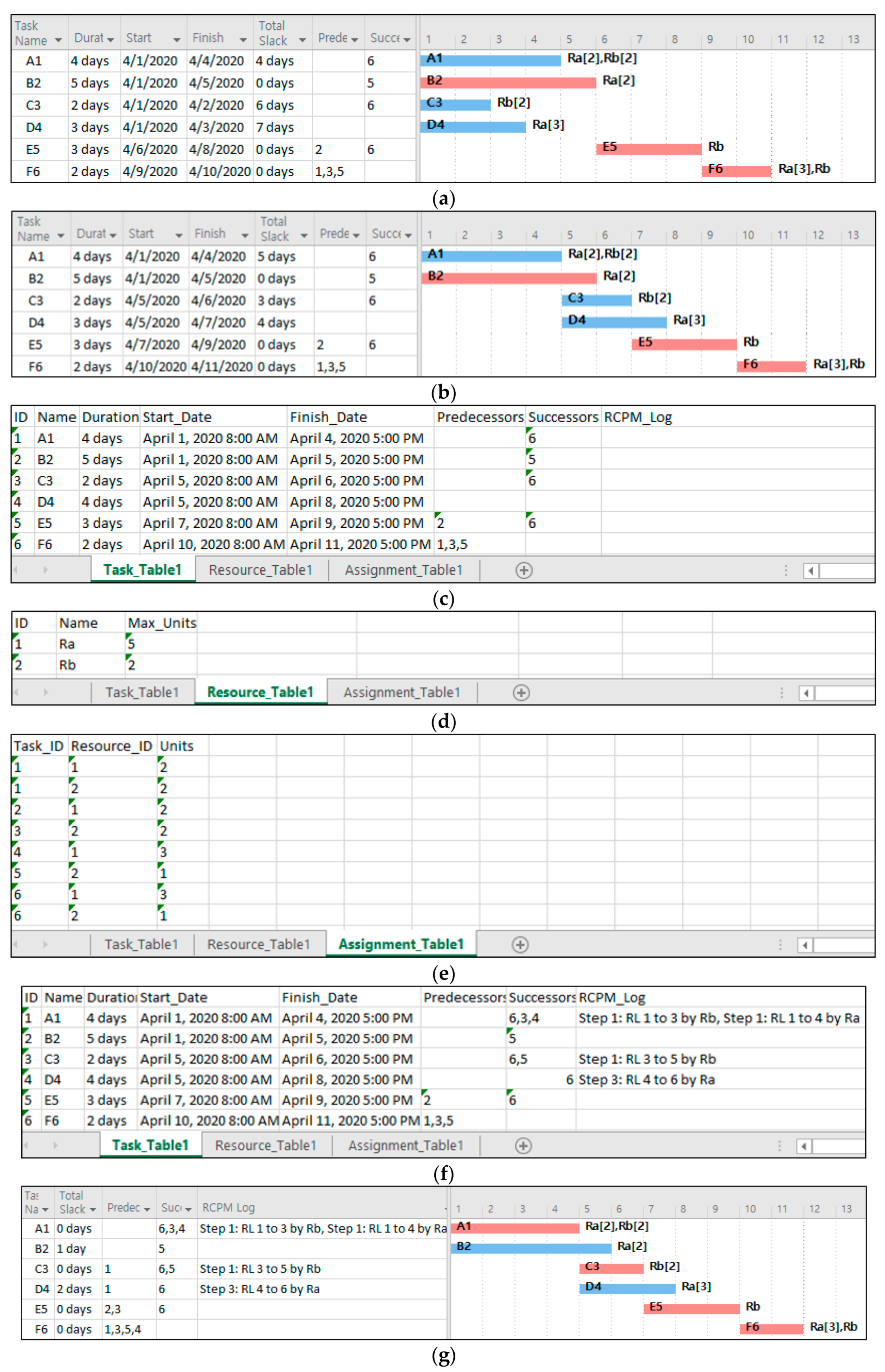
5.3. MSP Example
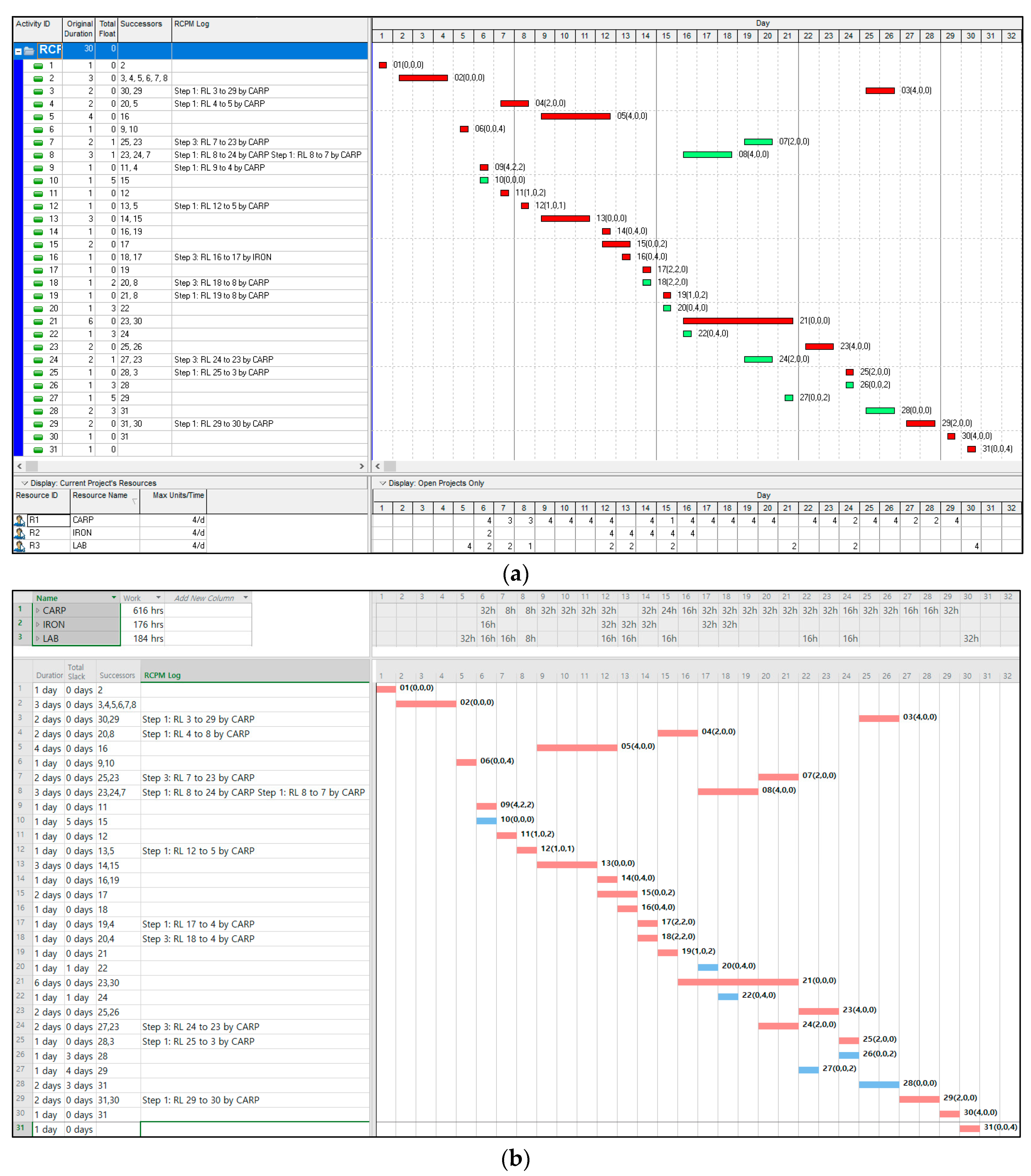
6. Case Study
7. Conclusions
- The role and meaning of the resource link were specified by dividing it into a direct resource link identified in step 1 and an indirect resource link identified in step 3.
- This study developed an eRCPM prototype system with Excel VBA. The system automatically identifies resource links by linking it using the export and import functions of P6 and MSP. There are differences in input/output data types in the two systems, but the eRCPM process is executed in one process. Therefore, if required data input/output functions are added, it can be expanded to other types of systems or other RCS results. In addition, other activity-related project management functions not currently provided by P6 or MSP, such as schedule validation, procurement, quality, safety, etc., may be implemented in conjunction with their spreadsheet software through a similar procedure introduced in this study.
- Because the step that identifies the resource link and the resource that has caused the constraint are managed as a log, the system can be used as an additional planning technique, such as adjusting the amount of supplying resources.
- In the future, by adding functions for calendars, PDM (Precedence Diagramming Method) relationships, time constraints, progressed schedules, etc., the system will become a more practical tool for project schedule management.
Funding
Conflicts of Interest
References
- O’Brien, J.; Plotnick, F. CPM in Construction Management, 8th ed.; McGraw-Hill Education: New York, NY, USA, 2016; pp. 635–700. [Google Scholar]
- De la Garza, J.M.; Franco-Duran, D.M.; Buckley, B. CPM Benefits in Estimating, Bidding Reported in Survey. 2017. Available online: https://www.enr.com/articles/43666-cpm-benefits-in-estimating-bidding-reported-in-survey (accessed on 15 September 2020).
- Jo, S.-H.; Lee, E.-B.; Pyo, K.-Y. Integrating a Procurement Management Process into Critical Chain Project Management (CCPM): A Case-Study on Oil and Gas Projects, the Piping Process. Sustainability 2018, 10, 1817. [Google Scholar] [CrossRef] [Green Version]
- Dasović, B.; Galić, M.; Klanšek, U. A Survey on Integration of Optimization and Project Management Tools for Sustainable Construction Scheduling. Sustainability 2020, 12, 3405. [Google Scholar] [CrossRef] [Green Version]
- Khatib, B.A.; Poh, Y.S.; El-Shafie, A. Delay Factors Management and Ranking for Reconstruction and Rehabilitation Projects Based on the Relative Importance Index (RII). Sustainability 2020, 12, 6171. [Google Scholar] [CrossRef]
- Leicht, D.; Castro-Fresno, D.; Dìaz, J.; Baier, C. Multidimensional Construction Planning and Agile Organized Project Execution—The 5D-PROMPT Method. Sustainability 2020, 12, 6340. [Google Scholar] [CrossRef]
- Kelley, J.E. The critical-path method: Resource planning and scheduling. In Industrial Scheduling; Prentice Hall: Upper Saddle River, NJ, USA, 1963; pp. 347–365. [Google Scholar]
- Moder, J.J.; Phillips, C.R.; Davis, E.W. Project Management with CPM, PERT, and Precedence Diagramming, 3rd ed.; Van Nostrand Reinhold: New York, NY, USA, 1983; pp. 203–204. [Google Scholar]
- Demeulemeester, E.L.; Herroelen, W. Project Scheduling: A Research Handbook; Kluwer Academic Publishers: New York, NY, USA, 2002; pp. 203–343. [Google Scholar]
- Wiest, J.D. Some Properties of Schedules for Large Projects with Limited Resources. Oper. Res. 1964, 12, 395–418. [Google Scholar] [CrossRef]
- Fondahl, J.W. The development of the construction engineer: Past progress and future problems. J. Constr. Eng. Manag. 1991, 117, 380–392. [Google Scholar] [CrossRef]
- Kim, K.; de la Garza, J.M. Phantom float. J. Constr. Eng. Manag. 2003, 129, 507–517. [Google Scholar] [CrossRef]
- Pantouvakis, J.; Manoliadis, O.G. A practical approach to resource-constrained project scheduling. Oper. Res. Int. J. 2006, 6, 299–309. [Google Scholar] [CrossRef]
- Ibbs, W.; Nguyen, L.D. Schedule analysis under the effect of resource allocation. J. Constr. Eng. Manag. 2007, 133, 131–138. [Google Scholar] [CrossRef]
- Kim, K. Delay analysis in resource-constrained schedules. Can. J. Civ. Eng. 2009, 36, 295–303. [Google Scholar] [CrossRef]
- Braimah, N. Construction Delay Analysis Techniques—A Review of Application Issues and Improvement Needs. Buildings 2013, 3, 506–531. [Google Scholar] [CrossRef] [Green Version]
- Liberatore, M.J.; Pollack-Johnson, B.; Smith, C.A. Project management in construction: Software use and research directions. J. Constr. Eng. Manag. 2001, 127, 101–107. [Google Scholar] [CrossRef]
- Franco-Duran, D.M.; de la Garza, J.M. Phantom float in commercial scheduling software. Autom. Constr. 2019, 103, 291–299. [Google Scholar] [CrossRef]
- Woodworth, B.M.; Shanahan, S. Identifying the critical sequence in a resource constrained project. Int. J. Proj. Manag. 1988, 6, 89–96. [Google Scholar] [CrossRef]
- Bowers, J.A. Criticality in resource-constrained networks. J. Oper. Res. Soc. 1995, 46, 80–91. [Google Scholar] [CrossRef]
- Lu, M.; Li, H. Resource-activity critical-path method for construction planning. J. Constr. Eng. Manag. 2003, 129, 412–420. [Google Scholar] [CrossRef] [Green Version]
- Nisar, S.A.; Yamamoto, K.; Suzuki, K. Resource-dependent critical path method for identifying the critical path and the ‘Real floats’ in resource-constrained project scheduling. J. Jpn. Soc. Civ. Eng. 2013, 69, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Kim, K.; de la Garza, J.M. Evaluation of the resource-constrained critical path method algorithms. J. Constr. Eng. Manag. 2005, 131, 522–532. [Google Scholar] [CrossRef]
- Franco-Duran, D.M.; de la Garza, J.M. Review of Resource-Constrained Scheduling Algorithms. J. Constr. Eng. Manag. 2019, 145, 1–16. [Google Scholar] [CrossRef]
- Tam, P.W.M.; Pujitha, B.G.D. Construction project scheduling by ranked positional weight method. Can. J. Civ. Eng. 1998, 25, 424–436. [Google Scholar] [CrossRef]
- Lu, M.; Lam, H.; Dai, F. Resource-constrained critical path analysis based on discrete event simulation and particle swarm optimization. Autom. Constr. 2008, 17, 670–681. [Google Scholar] [CrossRef]
- Melin, J.W.; Whiteaker, B. Fencing a bar chart. J. Constr. Div. 1981, 107, 497–507. [Google Scholar]
- Chen, P.H.; Shahandashti, S.M. Hybrid of genetic algorithm and simulated annealing for multiple project scheduling with multiple resource constraints. Autom. Constr. 2009, 18, 434–443. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Duration | Successors | Resource Usage | CPM Output | |||
|---|---|---|---|---|---|---|---|
| R.A | R.B | EST | LST | TF | |||
| A | 4 | F | 2 | 2 | 1 | 5 | 4 |
| B | 5 | E | 2 | 0 | 1 | 1 | 0 |
| C | 2 | F | 0 | 2 | 1 | 7 | 6 |
| D | 3 | - | 3 | 0 | 1 | 8 | 7 |
| E | 3 | F | 0 | 1 | 6 | 6 | 0 |
| F | 2 | - | 3 | 1 | 9 | 9 | 0 |
| Maximum resource units | 5 | 2 | |||||
| Activities (Tasks) 1 | Activity Relationships | Resources | Resource Assignments (Assignments) | ||||
|---|---|---|---|---|---|---|---|
| P6 | MSP | P6 | MSP | P6 | MSP | P6 | MSP |
| Activity ID Activity Name Original Duration Planned Start Planned Finish Predecessors Successors RCPM Log Activity Status 2 WBS Code 2 | ID Name Duration Start Finish Predecessors Successors RCPM Log | Predecessor Successor Relationship Type 2 Predecessor Activity Status 2 Successor Activity Status 2 | N/A | Resource ID Resource Name Max Units/Time | ID Name Max Units | Activity ID Resource ID Budgeted Units/Time Activity Status 2 Role ID 2 Cost Account ID 2 | Task ID Resource ID Units |
| ID | Dur. | Successors | Resource | CPM | RCS | eRCPM | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Carp (R1) | Iron (R2) | Lab (R3) | Start | TF | Start | TF | RL | TF | |||||||
| P6 | MSP | P6 | MSP | P6 | MSP | P6 | MSP | ||||||||
| 1 | 1 | 2 | 1 | 0 | 1 | 1 | −5 | 0 | 0 | 0 | |||||
| 2 | 3 | 3, 4, 5, 6, 7, 8 | 2 | 0 | 2 | 2 | −5 | 0 | 0 | 0 | |||||
| 3 | 2 | 30 | 4 | 5 | 19 | 25 | 25 | 0 | 0 | 29 | 29 | 0 | 0 | ||
| 4 | 2 | 20 | 2 | 5 | 13 | 7 | 15 | 9 | 1 | 5 | 8 | 0 | 0 | ||
| 5 | 4 | 16 | 4 | 5 | 9 | 9 | 9 | 1 | 3 | 0 | 0 | ||||
| 6 | 1 | 9, 10 | 4 | 5 | 0 | 5 | 5 | −5 | 3 | 0 | 0 | ||||
| 7 | 2 | 25 | 2 | 5 | 17 | 19 | 20 | 4 | 5 | 23 | 23 | 1 | 0 | ||
| 8 | 3 | 23 | 4 | 5 | 14 | 16 | 17 | 2 | 5 | 24, 7 | 24, 7 | 1 | 0 | ||
| 9 | 1 | 11 | 4 | 2 | 2 | 6 | 0 | 6 | 6 | −5 | 3 | 4 | 0 | 0 | |
| 10 | 1 | 15 | 6 | 5 | 6 | 6 | 0 | 8 | 5 | 5 | |||||
| 11 | 1 | 12 | 1 | 2 | 7 | 0 | 7 | 7 | −5 | 3 | 0 | 0 | |||
| 12 | 1 | 13 | 1 | 1 | 8 | 0 | 8 | 8 | −5 | 3 | 5 | 5 | 0 | 0 | |
| 13 | 3 | 14, 15 | 9 | 0 | 9 | 9 | −5 | 3 | 0 | 0 | |||||
| 14 | 1 | 16, 19 | 4 | 12 | 2 | 12 | 12 | 1 | 3 | 0 | 0 | ||||
| 15 | 2 | 17 | 2 | 12 | 0 | 12 | 12 | −5 | 3 | 0 | 0 | ||||
| 16 | 1 | 18 | 4 | 13 | 5 | 13 | 13 | 3 | 3 | 17 | 0 | 0 | |||
| 17 | 1 | 19 | 2 | 2 | 14 | 0 | 14 | 14 | −5 | 3 | 4 | 0 | 0 | ||
| 18 | 1 | 20 | 2 | 2 | 14 | 5 | 14 | 14 | 3 | 3 | 8 | 4 | 2 | 0 | |
| 19 | 1 | 21 | 1 | 2 | 15 | 0 | 15 | 15 | −1 | 3 | 8 | 0 | 0 | ||
| 20 | 1 | 22 | 4 | 15 | 5 | 15 | 17 | 6 | 1 | 3 | 1 | ||||
| 21 | 6 | 23, 30 | 16 | 0 | 16 | 16 | −1 | 3 | 0 | 0 | |||||
| 22 | 1 | 24 | 4 | 16 | 5 | 16 | 18 | 6 | 1 | 3 | 1 | ||||
| 23 | 2 | 25, 26 | 4 | 22 | 0 | 22 | 22 | −1 | 3 | 0 | 0 | ||||
| 24 | 2 | 27 | 2 | 17 | 5 | 19 | 20 | 4 | 1 | 23 | 23 | 1 | 0 | ||
| 25 | 1 | 28 | 2 | 24 | 0 | 24 | 24 | 3 | 3 | 3 | 3 | 0 | 0 | ||
| 26 | 1 | 28 | 2 | 24 | 0 | 24 | 24 | 3 | 3 | 3 | 3 | ||||
| 27 | 1 | 29 | 2 | 19 | 5 | 21 | 22 | 5 | 1 | 5 | 4 | ||||
| 28 | 2 | 31 | 25 | 0 | 25 | 25 | 3 | 3 | 3 | 3 | |||||
| 29 | 2 | 31 | 2 | 20 | 5 | 27 | 27 | 0 | 1 | 30 | 30 | 0 | 0 | ||
| 30 | 1 | 31 | 4 | 22 | 4 | 29 | 29 | 0 | 0 | 0 | 0 | ||||
| 31 | 1 | 4 | 27 | 0 | 30 | 30 | 0 | 0 | 0 | 0 | |||||
| Maximum units | 4 | 4 | 4 | ||||||||||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, K. Generalized Resource-Constrained Critical Path Method to Improve Sustainability in Construction Project Scheduling. Sustainability 2020, 12, 8918. https://doi.org/10.3390/su12218918
Kim K. Generalized Resource-Constrained Critical Path Method to Improve Sustainability in Construction Project Scheduling. Sustainability. 2020; 12(21):8918. https://doi.org/10.3390/su12218918
Chicago/Turabian StyleKim, Kyunghwan. 2020. "Generalized Resource-Constrained Critical Path Method to Improve Sustainability in Construction Project Scheduling" Sustainability 12, no. 21: 8918. https://doi.org/10.3390/su12218918