In this section, two sets of numerical experiments are conducted to examine: (1) the computational performance comparison between the two-stage method incorporated with the gradient projection algorithm (TSM-GP) and the network representation method incorporated with the new multi-path gradient projection algorithm (NR-MGP) in solving the CDA problem; (2) several applications of the CDA model to the situation in which travelers have access to detailed traffic information.
The variable cost is designed to reflect the congestion effect at each destination. Hence, following the form of the U.S. Bureau of Public Roads (BPR) function [
24], which is widely used to describe the congestion effect of link travel time in a transportation network, we calculate the variable destination cost in the experiments as follows:
where
a,
b,
c are all parameters and
Ds denotes the trip attraction at destination
s. Parameter
b can be regarded as the capacity in a certain level of service at the destinations, and it is reasonable that the trip attraction should be less than the capacity at most of the destinations. Hence,
b is set to 5000 in the experiments. For simplicity and without loss of generality, parameter c is set to 2, which guarantees the variable cost of a non-linear function. Note that there is no constant term in Equation (21) because the constant term is included in the constant attraction measure (i.e.,
Ms in Equation (3)). The experiments are conducted on the Microsoft Windows 8.1 operating system with Intel Core i5-5200U CPU @ 2.20 GHZ, 8GB RAM. All of the algorithms are coded in Visual C# language.
4.1. Computational Performance Comparison
The experiments demonstrate that it is hard for the two-stage method to achieve a highly accurate solution and the new approach can overcome this inferiority.
The RGAP, calculated by Equation (20), is adopted in the numerical experiments as the convergence criterion. Traditionally, the RGAPs of the trip distribution step and the traffic assignment step are calculated separately, but it does not reflect the correlation between the O–D flow and the network flow. Hence, the calculations of RGAP in these two algorithms are both based on the augmented network, which guarantees the comparison to be fair and more reasonable. Two test road networks, Sioux Falls and Chicago Sketch, obtained from
http://www.bgu.ac.il/~bargera/tntp/, are used. Sioux Falls network consists of 24 zones, 24 nodes, and 76 links, and the other consists of 387 zones, 933 nodes, and 2950 links. The dispersion parameter,
, is set to be 0.1 in the multinomial logit function for the trip distribution model. To prevent the destination cost being dominant in total travel cost (the sum of the route cost and destination cost) and convenience, parameter
a is set to be 0.1 in Equation (21) and the constant term of the attraction measure at each zone is set to be 1. The step size is set to be 0.2 and 0.06 on the Sioux Falls and Chicago Sketch network, respectively, which can make sure both algorithms converge to an expected precision within an acceptable computational time.
The computational results of the TSM-GP and the NR-MGP on both test networks are shown in
Figure 5 and
Figure 6, respectively.
On the Sioux Falls network, as
Figure 5 shows, the testing algorithms are stopped when RGAP = 1 × 10
−10 is achieved or 10 seconds is taken. The NR-MGP can achieve RGAP = 1 × 10
−10, but the TSM-GP can only achieve RGAP = 1 × 10
−5. Furthermore, the NR-MGP converges faster than the TSM-GP. On the Chicago Sketch network, as shown in
Figure 6, the algorithms are stopped once RGAP = 1 × 10
−4 is achieved or 5 hours is taken. The NR-MGP can achieve RGAP = 1 × 10
−4 but the other one oscillates between RGAP = 1 × 10
−2 and RGAP = 1 × 10
−3. Moreover, the NR-MGP tends to achieve a higher precision rather than oscillating at a certain precision.
Besides, the objective function value can be regarded as a more direct measure for estimating the solutions because of the CDA problem formulated as a minimization problem. Hence, we compare the objective function values of these two methods, and the results are shown in
Table 1. It can be observed that the NR-MGP method outperforms the TSM-GP method with smaller objective function values on both test networks, which demonstrates the proposed algorithm gets a better solution.
Based on the above experiment results, it can be concluded that it is difficult for the TSM-GP to achieve a relatively high precision and the new algorithm can get a highly accurate solution within an acceptable computational time.
4.2. Applications of the CDA Model
In this subsection, the experiments are all conducted on the Sioux Falls network. On the one hand, we compare the flow allocation differences between the conventional four-step model and the CDA model to illustrate the importance of applying the CDA model. On the other hand, we present three applications of the CDA model incorporated with different scenarios of TDM.
Experiment 1: This experiment intends to demonstrate the applicant significance of the CDA model. It is noteworthy that the four-step model is inherently inferior to the CDA model. Treating the solution of one step as the initial condition of the next step, the four-step model ignores the correlation among the steps, which results in the inconsistency problem (e.g., the travel times and time costs assumed in the trip distribution step disagree with the results of the traffic assignment) [
25,
26]. This problem means the four-step model has a worse performance for forecasting modern urban transportation because destination choice and route choice are related more closely with more detailed and accurate trip information accessible to travelers (as the example in
Section 1). The CDA model, one of the combined models designed to overcome the problem, can achieve the consistency by integrating the trip distribution step and the traffic assignment steps into a single procedure. Hence, the CDA model is superior to the four-step model, especially in modern urban transportation. Next, the flow allocation results are compared to show the differences between the conventional four-step model and the CDA model.
With the given trip production at each origin, the trip distribution step of the four-step model is assumed to follow the multinomial logit choice model. The parameter settings are the same as the previous subsection.
Figure 7 shows the absolute differences of V/C (degree of saturation, calculated by
flow/
capacity) on each link in a Geographic Information System (GIS) map. Links are coded by colors to highlight the magnitude of the absolute differences. As shown in
Figure 7, there are about 20% links with an absolute difference above 0.5, 53% links above 0.2, and 67% links above 0.1. In short, the flow allocation of the four-step model is far away from the CDA model, which implies that access to more detailed traffic information will have great effects on travelers’ behavior. Therefore, it is of great significance to apply the CDA model, being inherently superior to the four-step model, to forecasting demand in consideration of the travel behavior with the impacts of ITS.
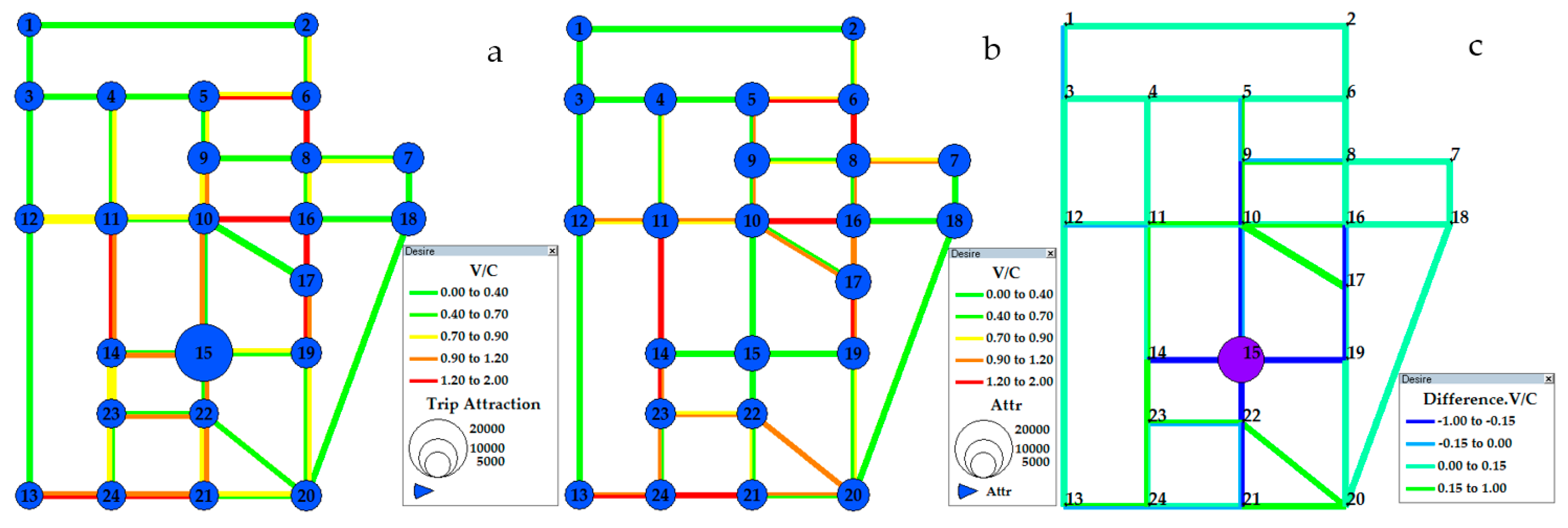
Experiment 2: This experiment is designed to analyze the impacts of multiple commercial centers on traveler’s behavior by the CDA model. The commercial centers can be categorized as static facilities in the CDA model. Hence, we adjust the constant term of the attraction measure at the destination zone to simulate the impacts of multiple centers. In this experiment, Zone 15 is assumed to be a central business district (CBD) and more attractive to travelers than the other zones. Here, we set the attraction measure at Zone 15 to be 15, and 1 for the other zones. Then, we adjust the attraction measure at Zone 8 to 15, assuming Zone 8 is a new commercial center. These two results are shown in
Figure 8a,b, respectively. The color of links indicates the V/Cs of them, and the size of each traffic zone is proportional to its trip attraction. Obviously, Zone 8 will attract much more travelers after it becomes a commercial center by comparing
Figure 8a,b. Furthermore, the differences of the network flow between these two results are shown in
Figure 8c. Links are coded with darker colors if the negative differences in V/C are greater, which means that more travelers will pass through these links. The CDA model shows that with the increase of trip attraction at Zone 8, it will lead to an increase in the traffic volume on the links around the new commercial center and a decrease in the congestion level on the links around the other zones.
The influences of the static facilities on the network flow pattern and trip attraction in zones are discussed in the above experiments. The results are understandable and acceptable based on our experience. In the following, we mainly introduce the applications of the CDA model to two practical TDM strategies, the parking charge and congestion charge strategies. In simple words, the objective of the TDM is to make use of the existing transportation infrastructure in a more efficient way. TDM has been proved to be useful to ease traffic congestion in practice, which is helpful for building the sustainable transportation system and improving living quality.
Experiment 3: This experiment aims at showing the application of the CDA model for verifying the parking charge strategy. The strategy has been implemented in many cities around the world. It can not only balance the parking supply and demand but also have benefits for easing traffic congestion. In this experiment, we assume that the parking fee is related to the trip attraction of the corresponding zone and the functional relation between them is shown in Equation (21). Moreover, the parking fee is set to be high at those zones close to the commercial center. Only one commercial center, Zone 15, is involved. We adjust the coefficient
a to 10 at Zone 15, 5 at the zones near Zone 15 (Zone 11, 10, 16, 17, 19, 22, 23, 14), and 1 at the other zones. The results without and with the strategy are shown in
Figure 9a,b, respectively. Comparing
Figure 9a,b, we can observe that less travelers will choose Zone 15 and the surrounding zones after implementing this strategy, which results from a relatively great increase in variable destination cost at these zones. This indicates that the charge level of each zone can be adjusted to control the attracted traffic volumes. It explains the benefits of the strategy in balancing the parking supply and demand. In addition, the differences in network flow between the two results are shown in
Figure 9c. The links are coded with a darker color if the negative changes in V/C are greater. Obviously, the implementation of this strategy will lead to flow decreases on links around the zones with high charge level, which demonstrates its benefits in easing the congestion level.
Experiment 4: The CDA model is applied to reveal the effects of the congestion charge strategy on travelers’ behavior in this experiment. The congestion charge strategy and the parking charge strategy both can be regarded as the TDM strategies and affect the traveler’s behavior from an economic aspect, but there are differences between them. On the one hand, Glazer and Niskanen pointed out that the hourly parking price may induce demand because more parking spaces become available as travelers shorten their dwell times (some specific period in which travelers visit their destinations) [
27]. Hence, the congestion charge strategy may perform better than the parking charge strategy for easing the traffic congestion level in certain situations. On the other hand, the congestion charge strategy is implemented only in the congested areas, and travelers must pay for their entrance or exit of the areas (which is obviously different from the parking charge strategy, because travelers will only be charged in their destinations for parking). Consequently, the CDA model cannot be adopted directly to handle this situation, because travelers should also be charged when they go across rather than end at the congested areas, which is not included in the model. Here, we exploit some network representation techniques to transform the original problem into the CDA problem. An example, used to illustrate the network modifications, is shown in
Figure 10. The red circle represents the congested area. First, add several nodes between the congested area and each adjacent node (node EA, EB, EC, and ED). Then, add several links to connect any two nodes in the red circle (the dashed line in
Figure 10). The cost on each dummy link is set to be the congestion fee, and the network outside the red circle is not modified. These modifications aim to make sure that travelers will pass through only one dummy link in the following three situations: (1) Zone E is the origin; (2) Zone E is the destination; (3) Zone E is the intermediate node, being neither the origin, nor the destination. Although there are many alternative paths to cross the congestion area between any two nodes in {EA, EB, EC, ED, E}, travelers will undoubtedly choose the shortest one containing only one dummy link. As a result, travelers will spend extra trip cost on the dummy links, which is equivalent to the congestion fee. Then, the problem is transformed into the CDA problem.
In this experiment, only one commercial center (Zone 15) is involved and the strategy is implemented only in Zone 15. The congestion fee is set to be 15, and the results without and with the strategy are shown in
Figure 11a,b, respectively. Apparently, many travelers who choose Zone 15 as their destination originally change their trip destination after implementing the charge strategy, owing to the great increase in destination cost of Zone 15. Besides, there are greatly decreasing flows on the links directly connecting with Zone 15 and increasing flows on the links around but not connecting with Zone 15. It indicates that travelers avoid crossing Zone 15 and choose the alternative paths because of the congestion fee.
Experiment 3 and 4 introduce the applications of the CDA model to two practical TDM strategies. Our experiments demonstrate that the parking charge has effects on not only balancing the parking demand and supply but also easing the congestion level around the commercial center, and the congestion charge strategy may lead to the flow decreases on the links directly connecting with the congested area. These results show that the CDA model has good interpretations in the impacts of these strategies on travelers’ behavior in consideration of the spread of ITS. Consequently, the CDA model can provide reliable assessments of the TDM strategies, which is of great value in practice.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}