1. Introduction
With the development of the intelligent vehicle, studies on the active collision avoidance system of intelligent vehicles have attracted more and more attention. Based on the perception of the driving environment, the intelligent vehicle can avoid collision risk by braking or steering.
To improve the performance of intelligent vehicles’ active collision avoidance system, researchers have carried out effective research on longitudinal and lateral avoidance. In the aspect of longitudinal collision avoidance, Li Suhua et al. [
1] proposed a longitudinal collision avoidance method for electric vehicles, establishing a safe distance model with consideration of road adhesion coefficient and driving intention. Li Shifu et al. [
2] made a theoretical derivation of the critical distance of the warning and the critical distance based on the braking process and obtained a safe distance model considering the emergency of the preceding vehicle. Considering the characteristics of vehicle dynamics and synthesizing the influence of road environment and vehicle factors, an RV hierarchical safety distance model was established in the paper [
3]. Hou Dezao et al. [
4] designed the upper controller based on the optimal tracking theory and driver priority principle.
In the aspect of lateral collision avoidance, Boada et al. [
5] designed an emergency steering path tracking controller with a fuzzy control logic method based on vehicle yaw rate. Soudbakhsh et al. [
6] constructed the state equation with actual lateral acceleration, ideal lateral acceleration, yaw angle, and ideal yaw angle error. Li Wei et al. [
7] proposed a lane change path planning method with an RBF neural network in which the boundary conditions of the path planning algorithm and path change based on polynomials are designed. This method has advantages in complex road conditions. Papers [
8,
9] studied the braking and steering modes based on the analysis of the vehicle braking process to design a longitudinal safety distance model under various working conditions and braking controllers [
8]. In paper [
9], the longitudinal and lateral safety distance models were also designed with different collision avoidance methods by analyzing the state of the preceding vehicle. Paper [
10] introduced the advantages and shortcomings of the traditional APF method, solving the problem of excessive initial attractive force and the intelligent vehicle cannot reach the target by improving the potential field functions.
It can be seen from the above results that most active collision avoidance systems currently focus on a single collision avoidance method, and there is no reasonable integration of longitudinal and lateral collision avoidance. With the increasingly complex driving conditions of smart cars, the independent active collision avoidance method is difficult to meet the driving requirements of intelligent cars due to its poor flexibility. Therefore, under the premise of ensuring the timeliness of active safety control, it is of great significance to design a comprehensive coordinated control strategy for longitudinal collision avoidance and lateral collision avoidance. At present, most researchers believe that an agent is a computing entity with a life cycle that exists in a specific environment and has the characteristics of real-time perception of the surrounding environment and the ability to operate independently and affect the environment [
11,
12]. A single agent mainly has four basic characteristics: autonomy, sociality, responsiveness, and initiative. A Multi-Agent System (MAS, Multi-Agent System) is composed of multiple single agents. Through the coordinated control of each agent, its problem-solving ability is far beyond the ability of a single agent, so the multi-agent system is widely used in the coordinated control of complex systems [
13,
14]. A novel hybrid artificial intelligence-layered multi-agent architecture was presented in the paper [
15] to help the digital transformation of energy and the smart grid.
In this paper, an intelligent vehicle active collision avoidance method based on a multi-agent coordinated control system is designed. The longitudinal and the lateral collision avoidance agents are designed based on the blackboard model, to provide reasonable collision avoidance way under different driving conditions. This proposed system can realize the multi-parallel operation of decision and planning at the same time. The lateral and the longitudinal collision avoidance agent can provide collision avoidance planning simultaneously, which can achieve the integration of collision avoidance decisions and planning. It will help reduce the time lag caused by the collision avoidance decision-planning process and improve real-time performance.
The rest of this paper is organized as follows. In
Section 2, the main agents of the intelligent vehicle are produced. In
Section 3, the blackboard model is introduced to coordinated control of each agent, and the real-time performance of the multi-agent active collision avoidance system is evaluated through simulations in
Section 4, followed by some concluding remarks in
Section 5.
2. Main Agents
Decision-making agents with lateral collision avoidance and longitudinal collision avoidance are designed in this section to provide decisions for collision avoidance.
2.1. Longitudinal Collision Avoidance Agent
The safety distance model [
16] of the longitudinal collision avoidance agent is designed as Equations (1) and (2):
where
is the environment perception time,
is the decision-planning time of the longitudinal collision avoidance agent,
is the mechanical delay time,
is the vehicle speed,
is the maximum braking deceleration of the vehicle,
is the minimum safety threshold between vehicles,
is the coefficient of road adhesion,
is the acceleration of gravity and
is the vehicle slope angle.
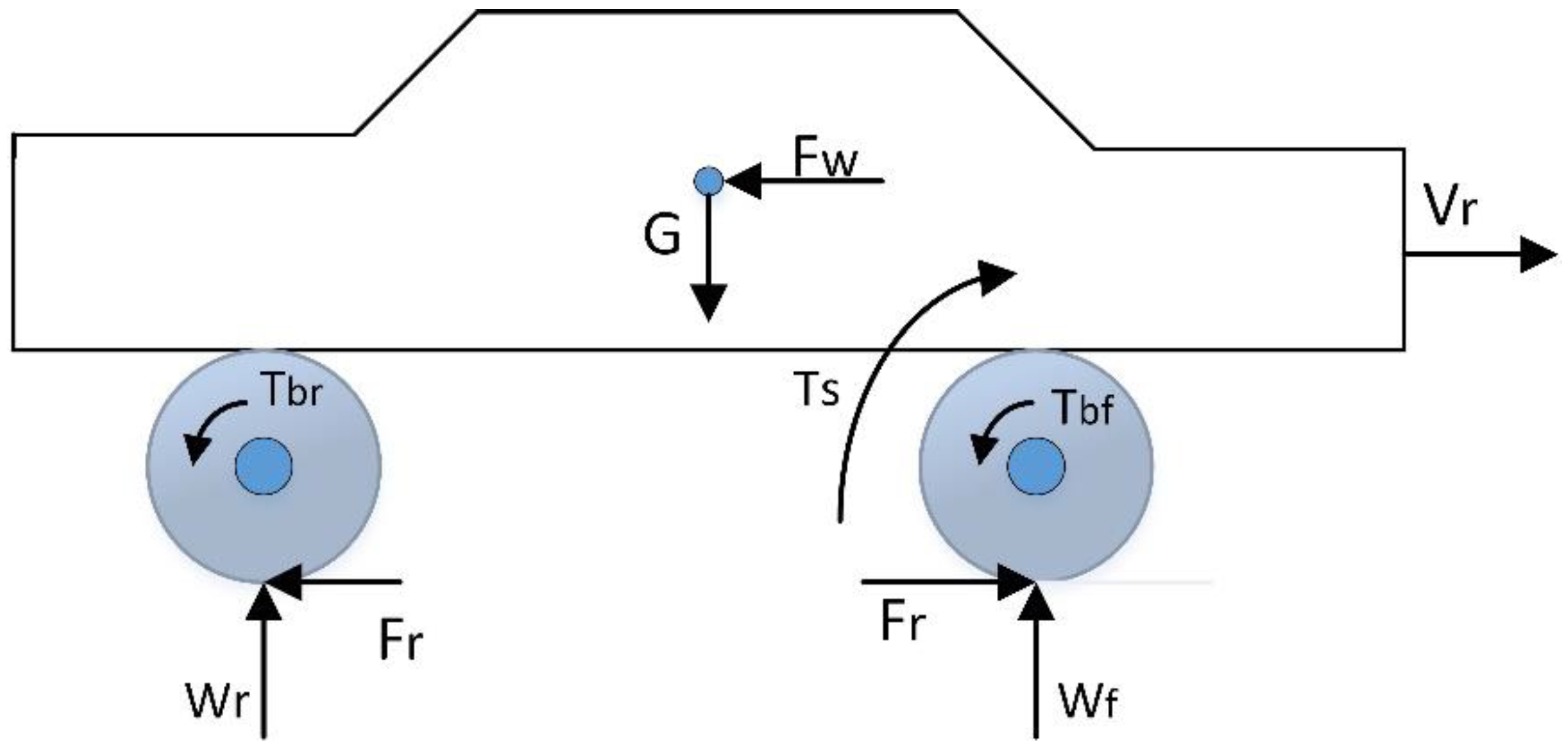
A longitudinal collision avoidance agent is designed to get a safe distance from obstacles in front of the intelligent vehicle. Brake pressure will be calculated if a smaller distance between the obstacle and the intelligent vehicle than the safety distance is detected.
The analysis of vehicle forces during braking is made to get the brake pressure and the diagram is shown in
Figure 1.
The force balance equation of the vehicle is shown in Equation (3):
is the air resistance force,
is the driving torque,
are the braking torque of the front and rear wheels,
are the ground friction of the ground acting on the front and rear wheels,
are the vertical force of the front and rear wheels,
is the driving force,
is the braking force, and
is the total resistance.
Air resistance and ground friction are shown in Equation (4):
Desired braking pressure can be calculated based on Equations (3) and (4), which is shown in Equation (5):
is the desired braking pressure and is the braking pressure ratio.
Most important of all, the braking force is represented approximately as a linear function of oil pressure in the brake system, as shown in Equation (6):
is the rolling radius of wheels, and is the pressure of the brake pipe.
2.2. Lateral Collision Avoidance Agent
A fifth-order polynomial lane-changing model is used in this paper to present a lateral collision avoidance agent [
17]:
is the lateral displacement for the vehicle to avoid a collision.
Longitudinal speed
is considered constant during the lane-changing and the relationship between trajectory and time can be shown as Equation (8):
is the lane-changing time, .
The equation of lateral acceleration in the course of vehicle lane change can be obtained based on Equation (8), which is shown in Equation (9):
The maximum lateral acceleration during the process can be calculated by Equation (10):
It can be seen from Equation (10) that the maximum lateral acceleration during the lane-changing process is related to the lane-changing time and the lateral distance . The minimum lane-changing time of the intelligent vehicle on dry asphalt pavement and wet asphalt pavement is set to 1.68 s and 2.1 s, and the maximum lateral accelerations are 7.67 m/s2 and 4.91 m/s2.
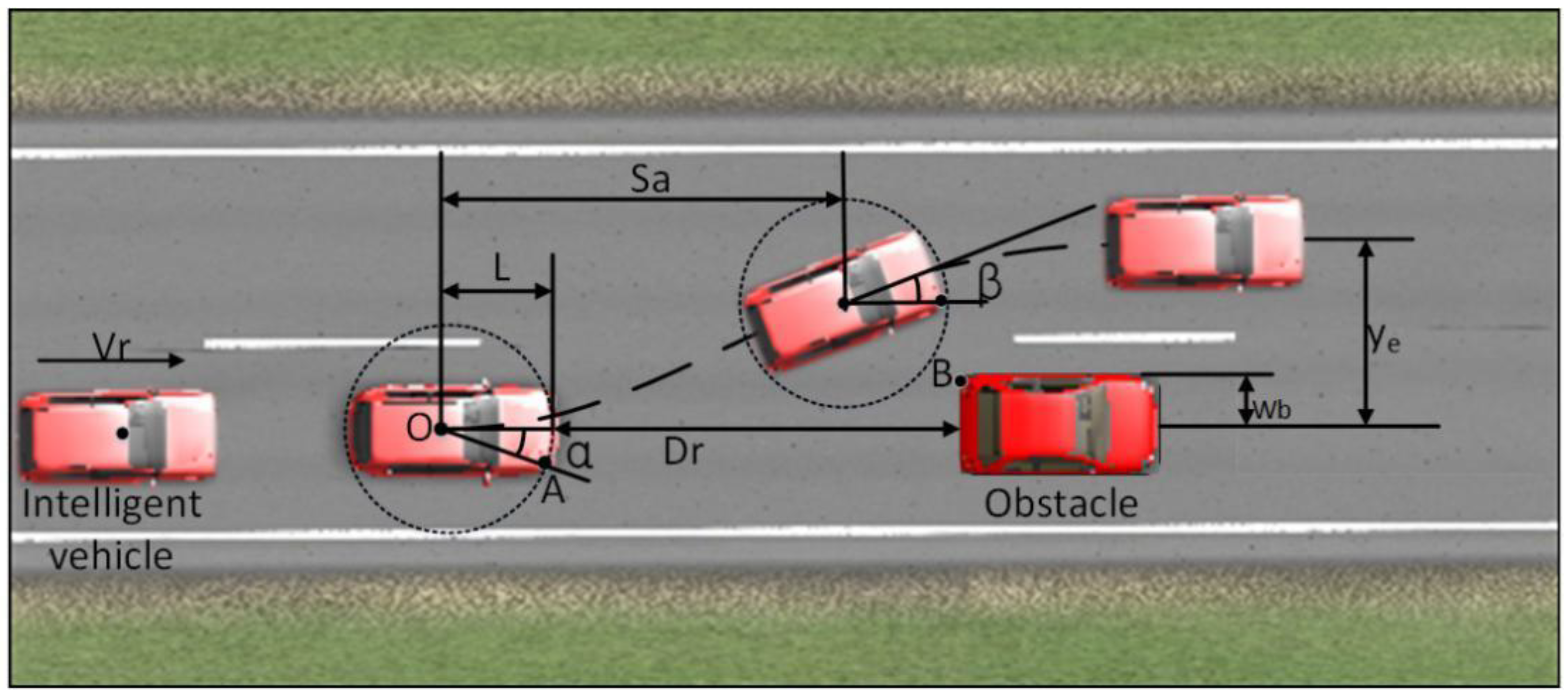
As shown in
Figure 2, to avoid collision with the front obstacle, the lateral displacement of the right-corner vehicle should be greater than the width of the obstacle
[
18].
Assuming that there is no vehicle in adjacent lanes. The lateral displacement of point A should meet the requirement of Equation (11) based on the path provided in Equation (11):
where
is the vehicle width,
is the collision time,
is the lateral distance between the obstacle edge and the vehicle center.
The longitudinal displacement
of the vehicle can be calculated as Equation (12):
where
is the perception delay,
is the decision-planning time and
is the steering mechanical delay.
The minimum longitudinal safety distance to accomplish horizontal change is shown in Equation (13):
The lateral collision avoidance agent is designed to calculate the desired steering wheel angle to follow the preset collision avoidance trajectory. A fuzzy sliding mode control, which has good robustness and real-time performance, is introduced to ensure the accuracy of the path tracking of the vehicle during the lateral collision avoidance process.
The yaw rate and derivative of the sideslip angle based on the vehicle two DOF model are shown in Equation (14) [
19,
20,
21]:
is the sideslip angle. is the lateral speed. is the vehicle mass. is the yaw rate. and are the front and rear wheelbase. is the vehicle’s moment of inertia. represent the stiffness of the front and rear tires.
The vehicle yaw rate of the vehicle in this paper can be expressed as Equation (15):
The vehicle yaw rate is chosen as the controlled variable. The tracking error between the yaw rate and the ideal yaw rate can be shown in Equation (16):
The controller switching function is designed as Equation (17):
where
is the sliding surface gain.
The sliding mode control law is designed based on Equations (15)–(17), which is shown in Equations (18) and (19):
Control of front wheel angle can be expressed as Equation (20):
The steering wheel angle can be obtained as Equation (21):
is the steering system ratio.
3. Multi-Agent Coordinated Control System Based on Blackboard Mode
Longitudinal and lateral collision avoidance agents are taken into consideration to ensure the multi-agent coordinated control system deals with the traffic accident risk. Additionally, global path planning agents, path tracking agents, and actuator control agents are taken as fundamental agents in the system.
Each agent of a multi-agent coordinated control system can be carried out in its default mode. Thus, the conflict problem in the driving process is generally classified into three categories according to the cause: resource conflicts, target conflicts, and result conflicts [
22].
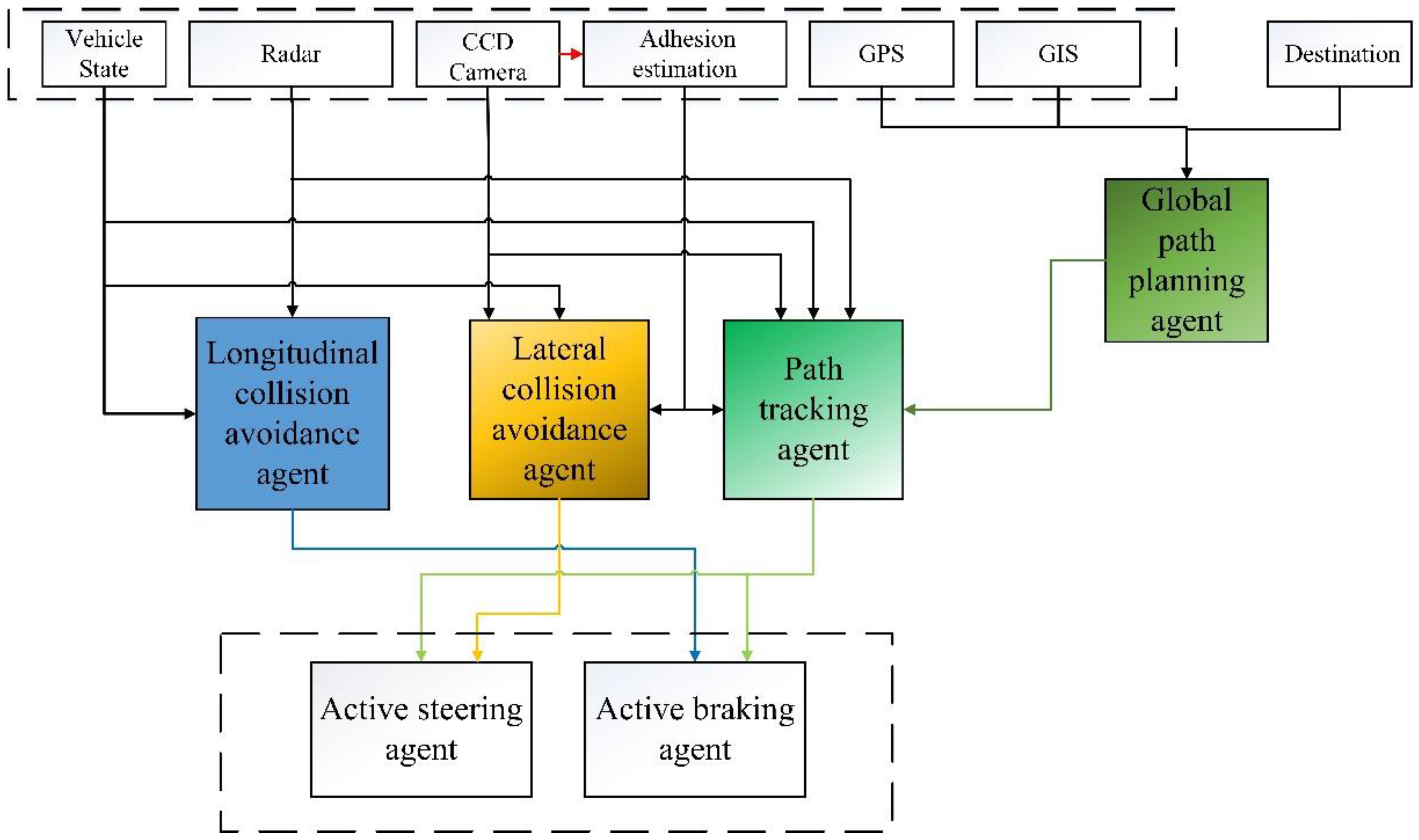
As can be seen from
Figure 3, conflicts between longitudinal and lateral collision avoidance agents are easily issued. When front obstacles are detected by vehicle sensors, safe distance will be calculated by the longitudinal collision avoidance agent and braking force will be transmitted to the active braking agent. Correspondingly, steering control signals will be transmitted to the active steering agent by the lateral collision avoidance agent. Different solutions for front-distance avoidance may lead to the result of conflicts in multi-agent systems.
The blackboard model is used to solve result conflicts in this section [
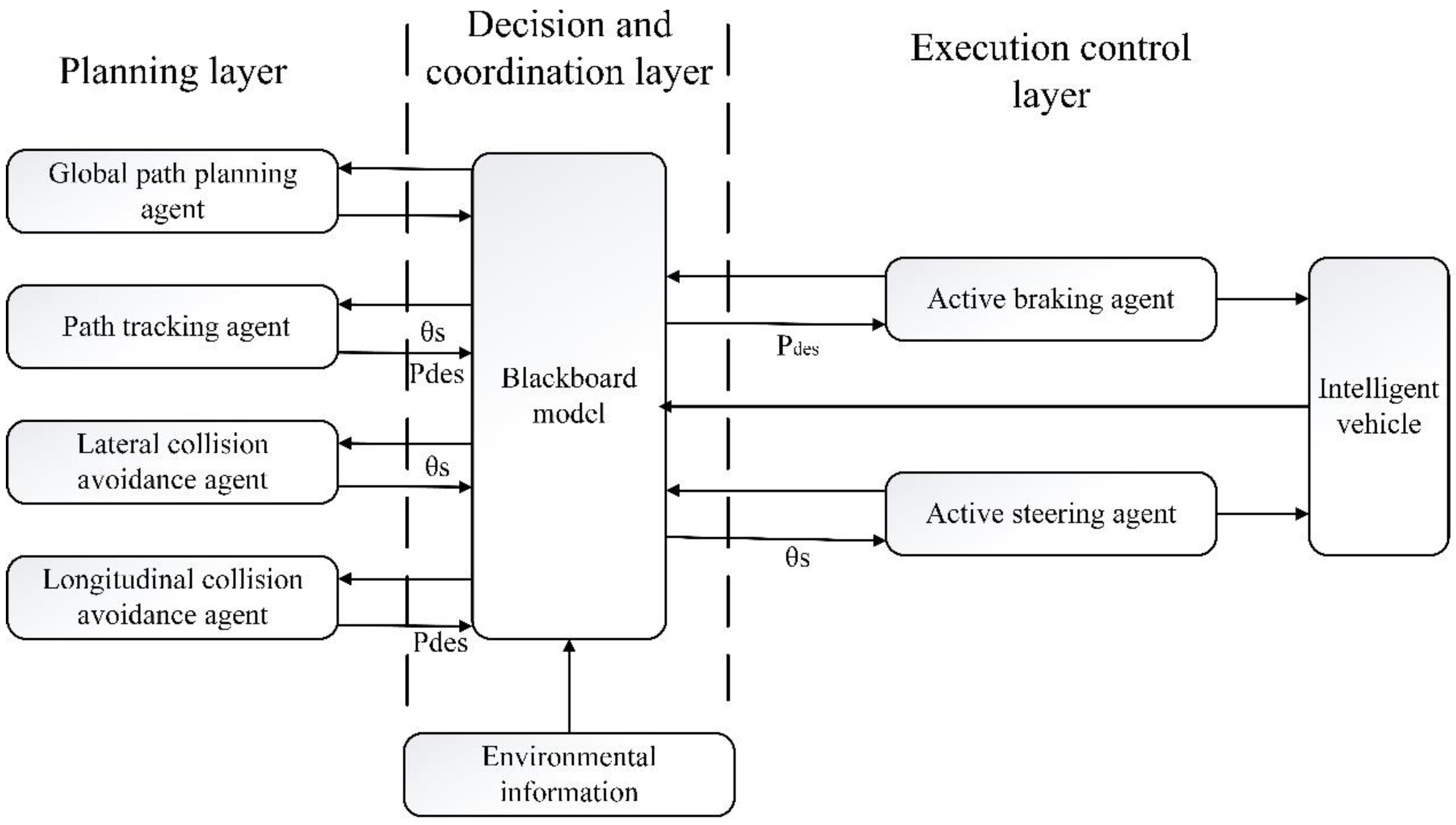
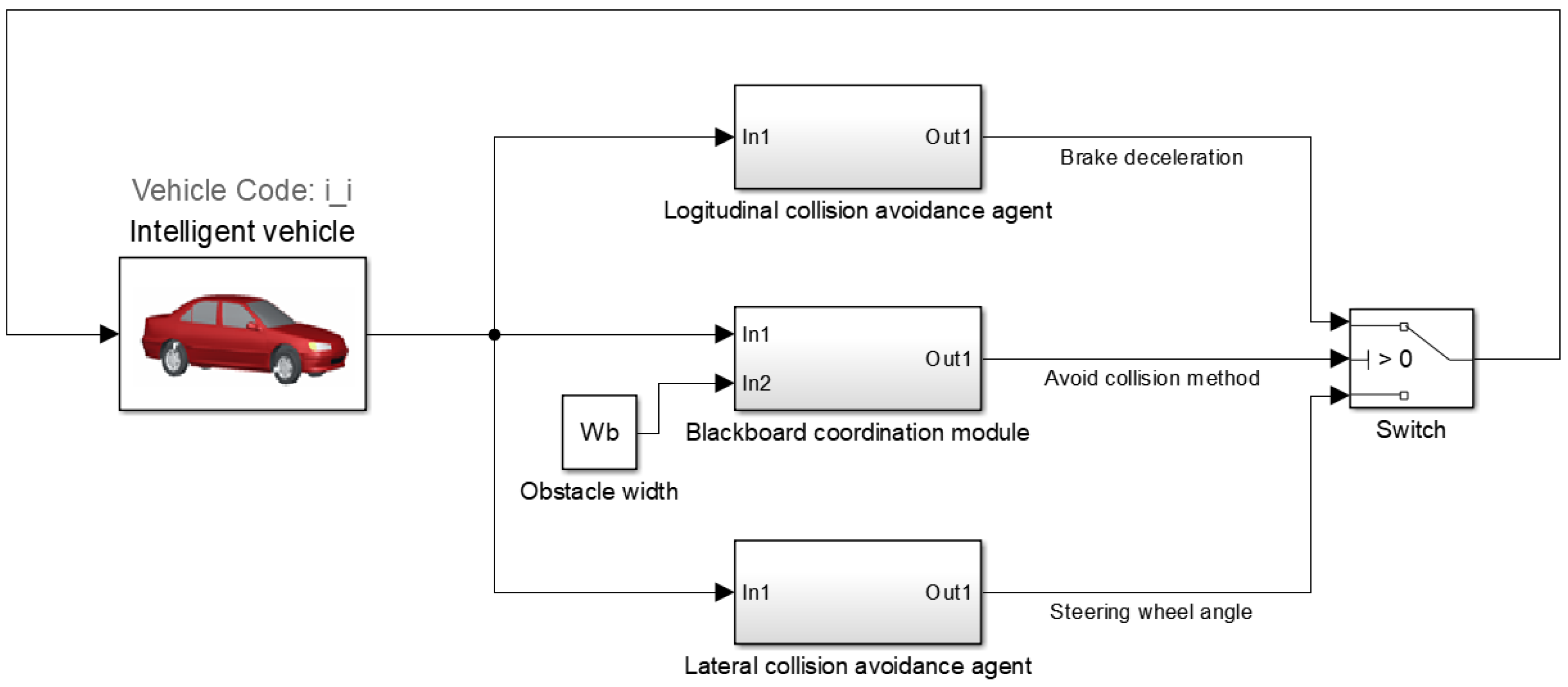
23], in which each agent exchanges data and writes its solution on the blackboard. The model is composed of three basic components: blackboard, knowledge source, and control mechanism. The internal coordination module manages the data on the blackboard in a unified manner. When there is a collision avoidance decision conflict between the agents, the coordination module can choose a reasonable collision avoidance method according to the internal rule base. A multi-agent coordinated control system based on a blackboard model is shown in
Figure 4. As shown in
Figure 4, the multi-agent active collision avoidance decision-making system based on the blackboard model is divided into three layers: a planning layer, decision and coordination layer, and execution control layer. Longitudinal and lateral collision avoidance agents constitute the planning layer of the system, which also includes the basic global path planning agent, path tracking agent, and actuator control agents. They can be regarded as different knowledge sources, and each agent can interact with the blackboard model to obtain information and complete a relatively independent and complete problem-solving. In the decision and coordination layer, the blackboard module is used to store the environmental information obtained by the environment perception system of the intelligent vehicle and the solution results of each agent, and the internal coordination module is used to manage the data on the blackboard in a unified way. When encountering collision avoidance decision conflicts between agents, the coordination module needs to choose a reasonable collision avoidance method according to the internal rule base. The executive control layer includes the active braking control agent and the active steering agent, which interacts with the blackboard model and finally, executes the decision of the multi-agent collision avoidance control system.
During the driving process, the information acquired by the environment perception layer is uploaded to the blackboard in real time, and each agent obtains information by interacting with the blackboard. When an obstacle appears on the default path, longitudinal and lateral collision avoidance agents are activated. The brake pressure and steering wheel angle are uploaded to the blackboard separately. If the two agents are activated at the same time, a choice must be made by the coordinated control module according to the actual situation.
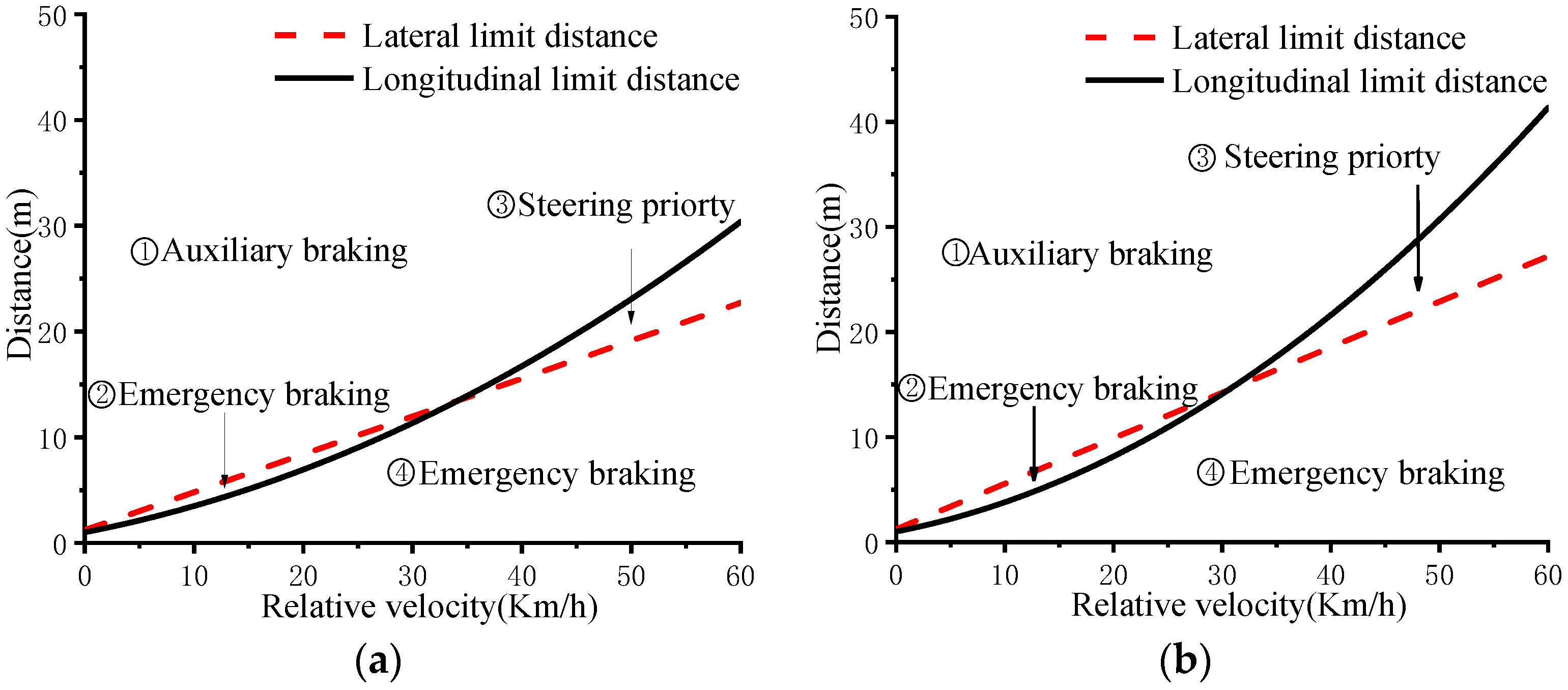
Figure 5 shows the choice of active collision avoidance during an emergency in different environments.
Longitudinal lateral collision avoidance agents are plotted in
Figure 5a,b. The minimum safety distance required for emergency longitudinal collision avoidance is related to the square of the vehicle speed, and the minimum longitudinal safety distance required for emergency lateral collision avoidance is related to the square of the vehicle speed. When the vehicle speed is in the lower range, the collision avoidance distance required for longitudinal collision avoidance is small. With the increase in speed, the collision avoidance distance required for longitudinal collision avoidance increases rapidly, and the longitudinal collision avoidance distance required for lateral collision avoidance begins to be smaller than that for longitudinal collision avoidance. It can be seen that
in area ① is greater than the longitudinal and lateral collision limit distance. In this case, the vehicle faces no risk and the auxiliary braking mode is adopted. At this time, more attention should be paid to the traffic efficiency and occupant comfort of the vehicle. The absolute value of the vehicle deceleration is limited to 4 m/s
2 or less.
When located in areas ② and ④, the maximum braking deceleration should be adopted in this emergency condition to reduce the risk of traffic accidents.
When is located in area ③, the speed of the vehicle is higher and the longitudinal distance required for collision avoidance is large. So, a lane-changing strategy will be taken to avoid a collision.
According to the analysis above, the decision and judgment process of the coordinated module is shown as follows, which is designed to make sure the vehicle drives along the planned path. When an obstacle ahead is detected by an intelligent vehicle, the distance between the intelligent vehicle and the obstacle must be compared with the safe distance of the limit collision distance of the longitudinal collision avoidance agent and the lateral collision avoidance agent, firstly. If the distance is longer than the braking limit distance, then it is according to the braking acceleration to judge whether to use auxiliary braking mode or emergency braking mode. However, if the distance is shorter than the braking distance and longer than the steering limit distance, which will use the steering collision avoidance mode.
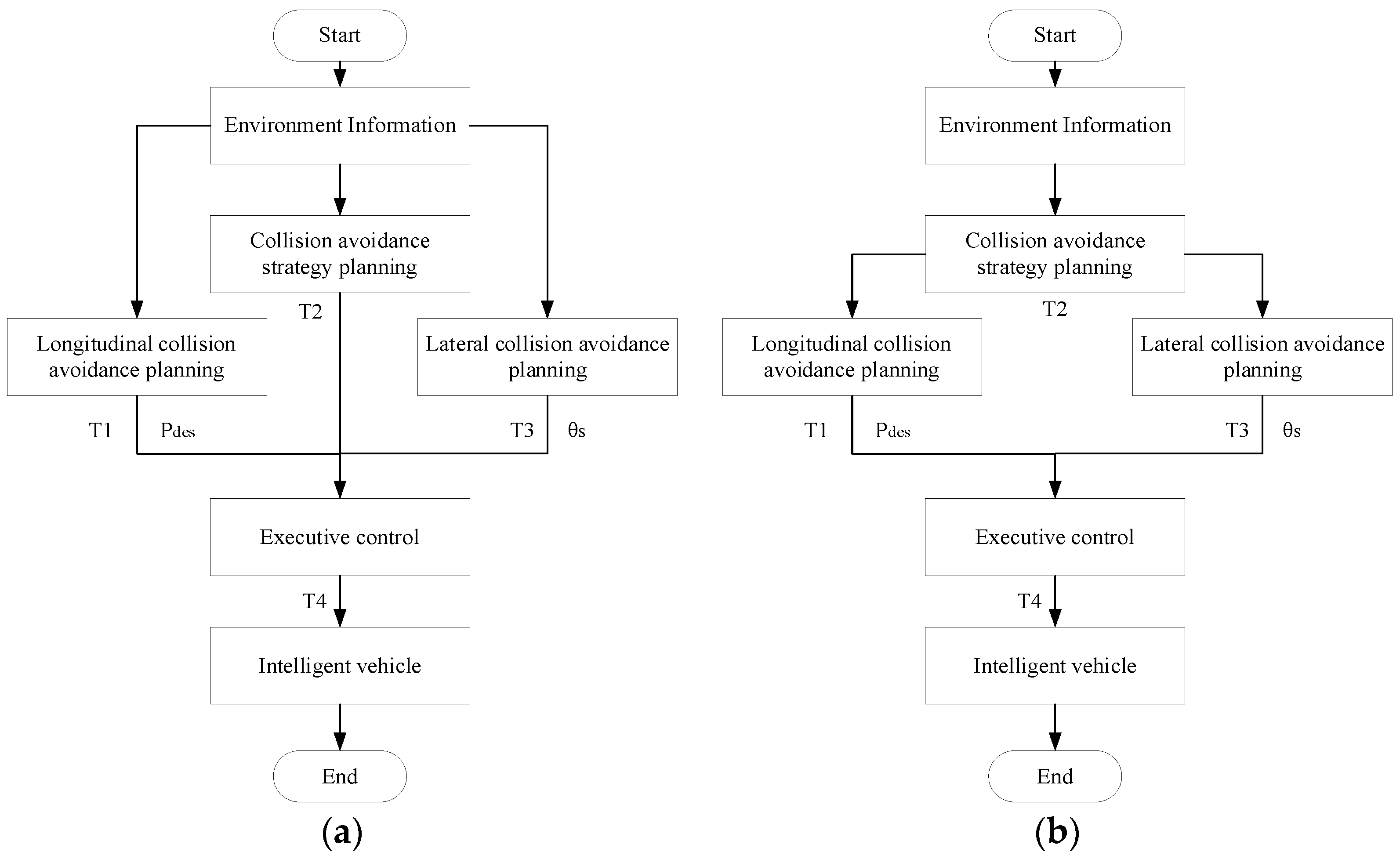
The active collision avoidance control strategy in this paper is shown in
Figure 6a and the collision avoidance control strategy is shown in
Figure 6b.
is the planning time of longitudinal collision avoidance,
is the decision time of collision avoidance way,
is the planning time of lateral collision avoidance,
is the execution control time.
As shown in
Figure 6a, time consumption
and
used during the entire collision avoidance can be calculated as Equations (22) and (23):
As can be seen from Equations (22) and (23), the separation of the collision avoidance decision and the collision avoidance planning will take more time.
The distributed multi-agent coordinated system based on the blackboard model performs parallel operations. The lateral and longitudinal collision avoidance agents, respectively, solve the steering wheel angle and brake pressure required for collision avoidance. At the same time, the blackboard coordinated module selects the optimal collision avoidance way according to the environmental information and can directly output the control instruction to agents of the execution control layer. By rationally unifying the decision and planning, the running time lag of the active collision avoidance system is reduced, and the real-time behavior of the vehicle collision avoidance is effectively improved.
5. Conclusions
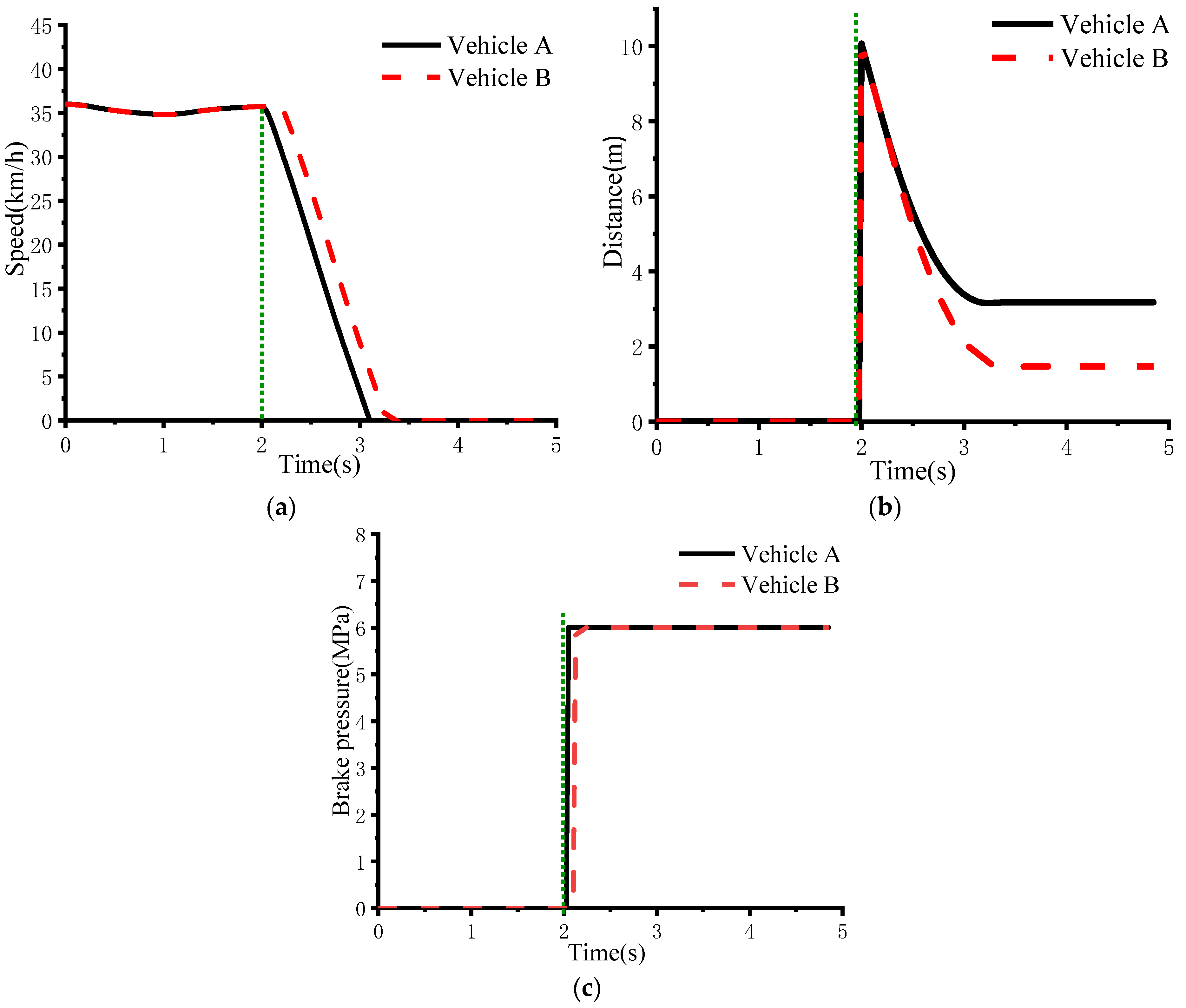
A multi-agent coordinated control system based on a blackboard model is proposed for improving the real-time performance of an active collision avoidance system in this paper. To do this, some agents, including a longitudinal collision avoidance agent and lateral collision avoidance agent, are established, and all of them can support and cooperate under the unified goal to produce reasonable control rules in coordination with the blackboard model, which can select a reasonable collision avoidance method under different driving conditions. In the process of active collision avoidance, the decision and planning are simultaneously operated. At the same time as the decision and planning are completed, underlying control instructions can be executed immediately, and the decision and planning integration of the collision avoidance system is realized, which effectively reduces the time lag during the process of active collision avoidance. The simulation results also indicate that the proposed multi-agent active collision avoidance system can reduce the decision and planning time, improving the real-time behavior of the intelligent vehicle.
The next step will further consider the state of the preceding vehicle. In terms of emergency steering and collision avoidance, the next step will be to consider vehicles in adjacent lanes to ensure that vehicles in adjacent lanes are not affected during the process of changing lanes to avoid collisions. At the same time, a real vehicle test is arranged.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}