
Experimental Validation of an Automated Approach for Estimating the Efficiency and Heat Balance of Gearboxes Based on an Electrified Heavy Commercial Vehicle Axle



Abstract
:1. Introduction
2. General Methodology
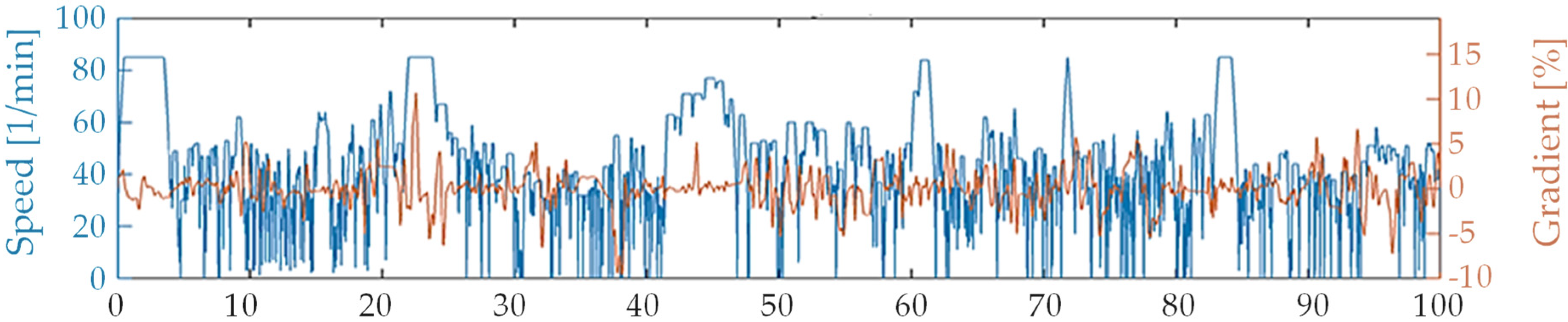
2.1. Requirement Specification Based on VECTO
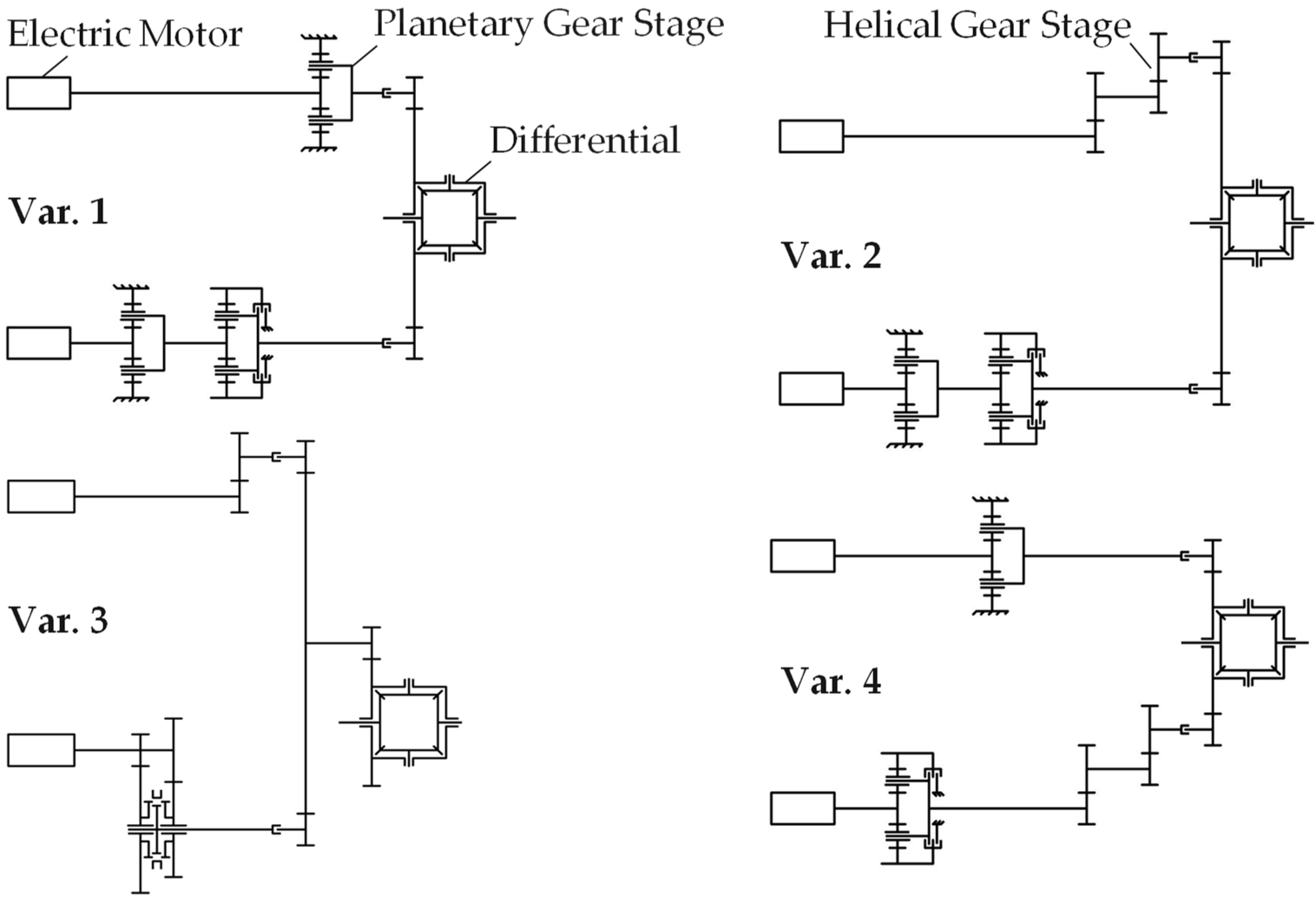
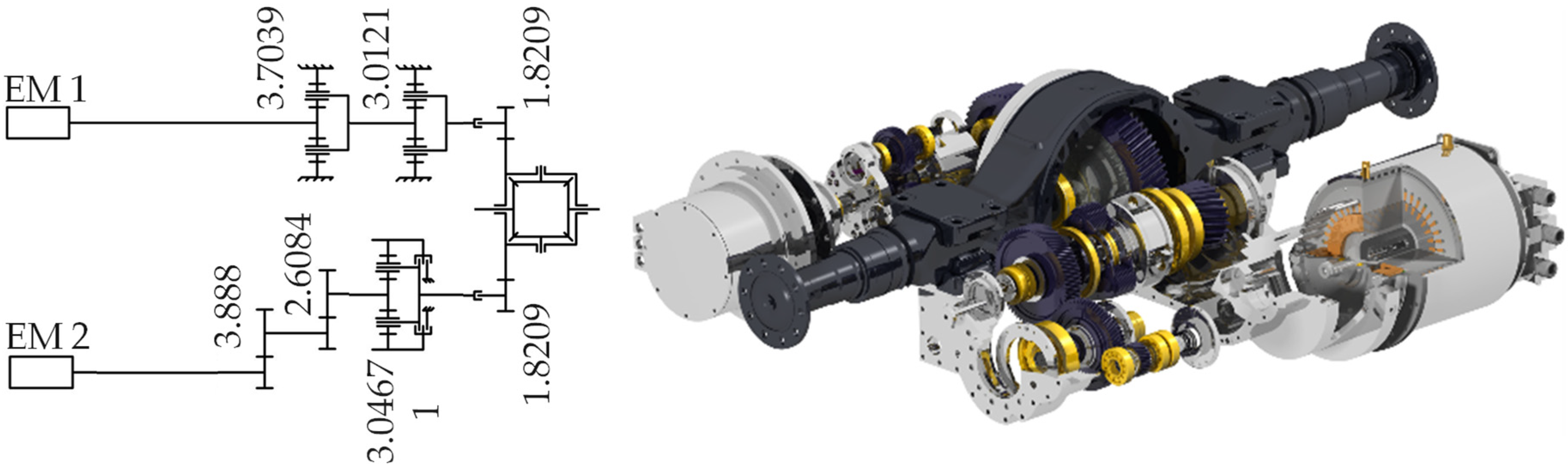
2.2. Methodical Approach for the Automated Identification of Suitable Powertrain Topology and Gearbox Design
2.3. Method of Iterative Efficiency Simulation
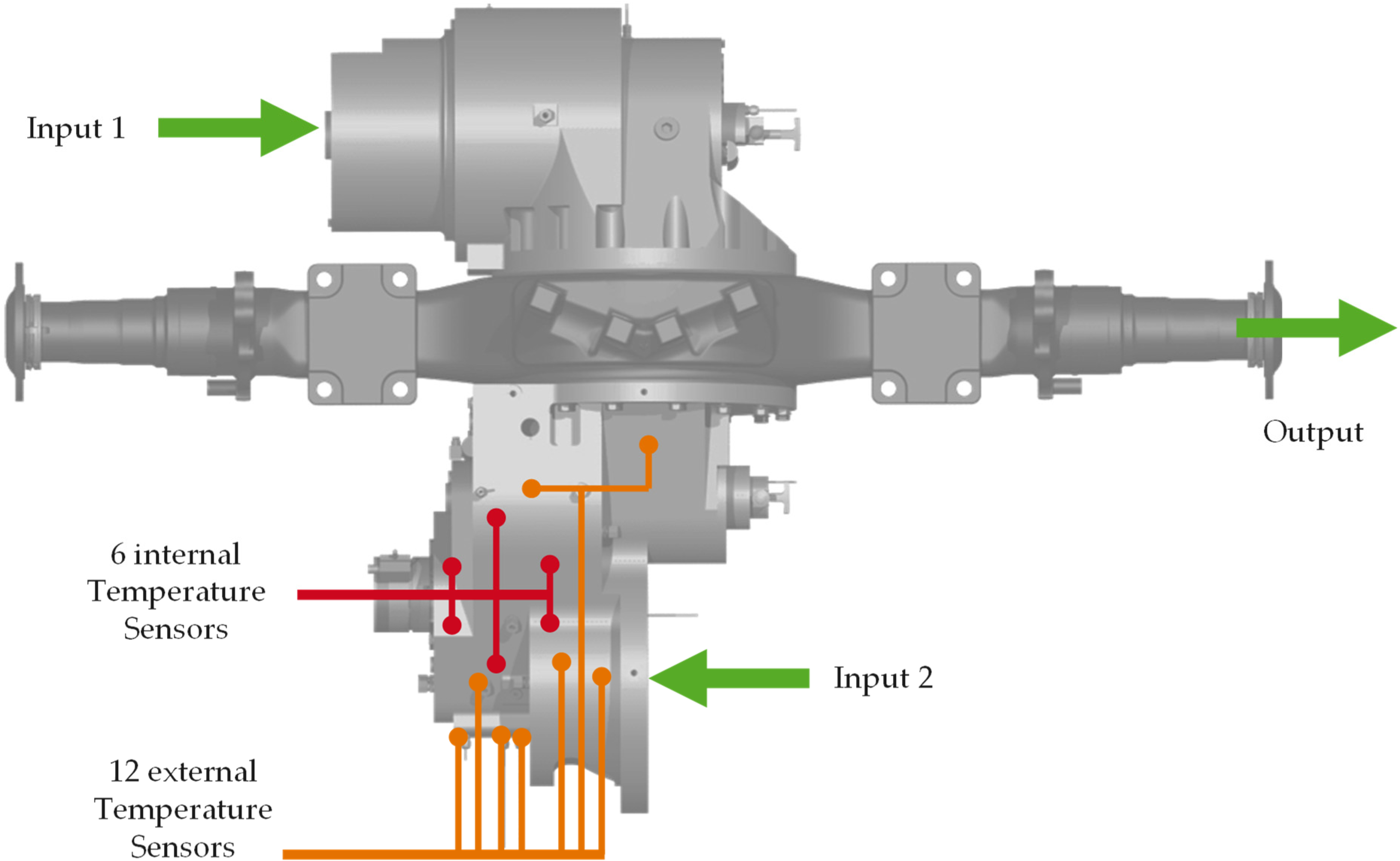
2.4. Thermal Modelling Approach
3. Results
3.1. Efficiency Results
3.2. Thermal Modelling and Measurement Results
4. Conclusions and Outlook
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- European Parliament and Council. Regulation (EU) 2019/1242 of the european parliament and of the council. Presented at the CO2 Emission Performance Standards for New Heavy-Duty Vehicles and Amending Regulations (EC) No 595/2009 and (EU) 2018/956 of the European Parliament and of the Council and Council Directive 96/53/EC, Brüssel, Belgium, 20 June 2019. [Google Scholar]
- ACEA. CO2 Emissions from Heavy-Duty Vehicles: Preliminary CO2 Baseline (Q3-Q4 2019) Estimate; European Automobile Manufacturers Association: Brüssel, Belgium, 2020. [Google Scholar]
- Rodríguez, F. The Future of Vecto: CO2 Certification of Advanced Heavy-Duty Vehicles in the European Union; The International Council on Clean Transportation: Berlin, Germany, 2019. [Google Scholar]
- Fiori, C.; Ahn, K.; Rakha, H.A. Power-based electric vehicle energy consumption model: Model development and validation. Appl. Energy 2016, 168, 257–268. [Google Scholar] [CrossRef]
- Earl, T. Analysis of Long Haul Battery Electric Trucks in EU: Marketplace and Technology, Economic, Environmental, and Policy Perspectives. Presented at 8th Commercial Vehicle Workshop, Graz, Austria, 17–18 May 2018. [Google Scholar]
- Wu, J.; Liang, J.; Ruan, J.; Zhang, N.; Walker, P.D. Efficiency comparison of electric vehicles powertrains with dual motor and single motor input. Mech. Mach. Theory 2018, 128, 569–585. [Google Scholar] [CrossRef]
- Ahssan, M.R.; Ektesabi, M.M.; Gorji, S.A. Electric Vehicle with Multi-Speed Transmission: A Review on Performances and Complexities. SAE Int. J. Alt. Power. 2018, 7, 169–181. [Google Scholar] [CrossRef]
- Gronwald, P.-O.; Kern, T.A. Traction Motor Cooling Systems: A Literature Review and Comparative Study. IEEE Trans. Transp. Electrific. 2021, 7, 2892–2913. [Google Scholar] [CrossRef]
- Geiger, J. Wirkungsgrad und Wärmehaushalt von Zahnradgetriebem bei instationären Betriebsbedingungen. Ph.D. Dissertation, Technische Universität München, München, Germany, 2014. [Google Scholar]
- Changenet, C.; Oviedo-Marlot, X.; Velex, P. Power Loss Predictions in Geared Transmissions Using Thermal Networks-Applications to a Six-Speed Manual Gearbox. J. Mech. Des. 2006, 128, 618–625. [Google Scholar] [CrossRef]
- Höhn, B.-R.; Michaelis, K. Influence of oil temperature on gear failures. Tribol. Int. 2004, 37, 103–109. [Google Scholar] [CrossRef]
- Kieninger, D. The Highly Integrated ModulED Drive Module–Holistic Concept Design. In Proceedings of the 20th International VDI Congress “Dritev”, Bonn, Germany, 24–25 June 2020. [Google Scholar]
- Kieninger, D.; Hemsen, J.; Köller, S.; Uerlich, R. Automated Design and Optimization of Transmissions for Electric Vehicles. MTZ Worldw. 2019, 80, 88–93. [Google Scholar] [CrossRef]
- Hemsen, J.; Negri, T.; Trost, C.; Eckstein, L. Comparison of Permanent Magnet Rotor Designs for Different Vehicle Classes and Driving Scenarios: A Simulation Study. SAE Int. J. Alt. Power. 2021, 10, 207–226. [Google Scholar] [CrossRef]
- Uerlich, R. Concept ELV2 Design of an Electric Drive Axle for Heavy Distribution Traffic. In Proceedings of the 30th Aachen Colloquium Sustainable Mobility, Aachen, Germany, 4–6 October 2021. [Google Scholar]
- Köller, S.; Uerlich, R.; Witham, G.; Eckstein, L. Concept ELV2—Development of an Electric Drive Axle for Heavy Commercial Vehicles, ELIV 2021; VDI Verlag: Düsseldorf, Germany, 2021; 653-XVI. [Google Scholar]
- Köller, S.; Schmitz, V. Systematic Synthesis and Multi-Criteria Evaluation of Transmission Topologies for Electric Vehicles. Automot. Engine Technol. 2022, 7, 65–79. [Google Scholar] [CrossRef]
- DIN ISO 6336:2019; Calculation of Load Capacity of Spur and Helical Gears (ISO_6336:2019). Beuth Verlag GmbH: Geneva, Switzerland, 2019.
- DIN ISO 21771:2014-08; Zahnräder_- Zylinderräder und Zylinderradpaare mit Evolventenverzahnung_- Begriffe und Geometrie (ISO_21771:2007). Beuth Verlag GmbH: Berlin, Germany, 2014.
- Naunheimer, H.; Bertsche, B.; Ryborz, J.; Novak, W.; Fietkau, P. Fahrzeuggetriebe; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- ISO/TC 60/SC 2. ISO/TR 14179-2:2001; Gears—Thermal Capacity—Part 2: Thermal Load-Carrying Capacity. Beuth Verlag: Berlin, Germany, 2001.
- Blok, H. Recent Developments in Gear Tribology. In Proceedings of the Institution of Mechanical Engineers, London, UK, 1 September 1969. [Google Scholar]
- Funck, G. Wärmeabführung bei getrieben unter quasistationären Betriebsbedingungen. Ph.D. Dissertation, Technische Universität München, München, Germany, 1985. [Google Scholar]
- Uerlich, R.; Koch, T.; Theising, H.; Eckstein, L. Method for thermal evaluation of automotive gearbox packages taking into account load point-dependent oil distribution. Automot. Engine Technol. 2022. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear Ratio | Rot. Speed [1/min] | Torque [Nm] | Oil Temp. [°C] | Gear Ratio | Rot. Speed [1/min] | Torque [Nm] | Oil Temp. [°C] |
|---|---|---|---|---|---|---|---|
| 14.847 | 2500 | 100 | 40, 50, 60 | 46.128 | 2500 | 100 | 50 |
| 2500 | 200 | 40, 50, 60 | 2500 | 200 | 40, 50 | ||
| 2500 | 400 | 50 | 2500 | 300 | 50 | ||
| 5000 | 100 | 50 | 7500 | 100 | 50 | ||
| 5000 | 200 | 40, 50, 60 | 7500 | 200 | 40, 50, 60 | ||
| 5000 | 400 | 40, 50, 60 | 7500 | 300 | 40, 50 | ||
| 7500 | 100 | 50 | |||||
| 7500 | 200 | 40, 50, 60 | |||||
| 7500 | 300 | 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uerlich, R.; Köller, S.; Witham, G.; Koch, T.; Eckstein, L. Experimental Validation of an Automated Approach for Estimating the Efficiency and Heat Balance of Gearboxes Based on an Electrified Heavy Commercial Vehicle Axle. World Electr. Veh. J. 2022, 13, 142. https://doi.org/10.3390/wevj13080142
Uerlich R, Köller S, Witham G, Koch T, Eckstein L. Experimental Validation of an Automated Approach for Estimating the Efficiency and Heat Balance of Gearboxes Based on an Electrified Heavy Commercial Vehicle Axle. World Electric Vehicle Journal. 2022; 13(8):142. https://doi.org/10.3390/wevj13080142
Chicago/Turabian StyleUerlich, Roland, Sven Köller, Gordon Witham, Theo Koch, and Lutz Eckstein. 2022. "Experimental Validation of an Automated Approach for Estimating the Efficiency and Heat Balance of Gearboxes Based on an Electrified Heavy Commercial Vehicle Axle" World Electric Vehicle Journal 13, no. 8: 142. https://doi.org/10.3390/wevj13080142