
Nano/Micromotors for Cancer Diagnosis and Therapy: Innovative Designs to Improve Biocompatibility

Abstract
:1. Introduction
2. Bubble Propulsion by Inorganic Catalysts
3. Bio-Hybrid Nano/Micromotor

4. Ultrasound Waves for Propulsion
5. Electromagnetic Wave (Light)-Based Propulsion
6. Magnetic Propulsion
7. Dual-Propelled Nano/Micromotors
8. Microswarm
9. In Vivo Nano/Micromotor Visualization
10. Conclusions and Perspectives
Author Contributions
Funding
Conflicts of Interest
References
- Wang, J.; Dong, R.; Wu, H.; Cai, Y.; Ren, B. A Review on Artificial Micro/Nanomotors for Cancer-Targeted Delivery, Diagnosis, and Therapy. Nano-Micro Lett. 2020, 12, 11. [Google Scholar] [CrossRef] [PubMed]
- Hou, Y.; Wang, H.; Fu, R.; Wang, X.; Yu, J.; Zhang, S.; Huang, Q.; Sun, Y.; Fukuda, T. A review on microrobots driven by optical and magnetic fields. Lab Chip 2023, 23, 848–868. [Google Scholar] [CrossRef]
- Fernández-Medina, M.; Ramos-Docampo, M.A.; Hovorka, O.; Salgueiriño, V.; Städler, B. Recent Advances in Nano- and Micromotors. Adv. Funct. Mater. 2020, 30, 1908283. [Google Scholar] [CrossRef]
- Molinero-Fernández, Á.; Moreno-Guzmán, M.; Arruza, L.; López, M.Á.; Escarpa, A. Polymer-Based Micromotor Fluorescence Immunoassay for On-the-Move Sensitive Procalcitonin Determination in Very Low Birth Weight Infants’ Plasma. ACS Sens. 2020, 5, 1336–1344. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Lyu, Y.; Li, J.; Wang, C.; Xing, N.; Yang, J.; Zuo, M. Micromotor-assisted fluorescence detection of Hg2+ with bio-inspired AO–Mn2O3/γ-AlO(OH). Environ. Sci. Nano 2021, 8, 3833–3845. [Google Scholar] [CrossRef]
- Fang, D.; Tang, S.; Wu, Z.; Chen, C.; Wan, M.; Mao, C.; Zhou, M. Electrochemical sensor based on micromotor technology for detection of Ox-LDL in whole blood. Biosens. Bioelectron. 2022, 217, 114682. [Google Scholar] [CrossRef]
- Chen, Q.; Guo, W.; Fang, D.; Li, T.; Chen, L.; Mao, C.; Wan, M.; Shen, J. Mg-based micromotors for efficient electrochemical detection of circulating tumor cells. Sens. Actuators B Chem. 2023, 390, 133933. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Y.; Li, Y.; Xu, D.; Pan, X.; Chen, Y.; Zhou, D.; Wang, B.; Feng, H.; Ma, X. Magnetic Nanomotor-Based Maneuverable SERS Probe. Research 2020, 2020, 7962024. [Google Scholar] [CrossRef]
- Xu, T.; Luo, Y.; Liu, C.; Zhang, X.; Wang, S. Integrated Ultrasonic Aggregation-Induced Enrichment with Raman Enhancement for Ultrasensitive and Rapid Biosensing. Anal. Chem. 2020, 92, 7816–7821. [Google Scholar] [CrossRef]
- Cai, L.; Zhao, C.; Chen, H.; Fan, L.; Zhao, Y.; Qian, X.; Chai, R. Suction-Cup-Inspired Adhesive Micromotors for Drug Delivery. Adv. Sci. 2022, 9, 2103384. [Google Scholar] [CrossRef]
- Choi, H.; Jeong, S.H.; Kim, T.Y.; Yi, J.; Hahn, S.K. Bioinspired urease-powered micromotor as an active oral drug delivery carrier in stomach. Bioact. Mater. 2022, 9, 54–62. [Google Scholar] [CrossRef] [PubMed]
- Guzmán, E.; Maestro, A. Synthetic Micro/Nanomotors for Drug Delivery. Technologies 2022, 10, 96. [Google Scholar] [CrossRef]
- Kong, L.; Rosli, N.F.; Chia, H.L.; Guan, J.; Pumera, M. Self-Propelled Autonomous Mg/Pt Janus Micromotor Interaction with Human Cells. Bull. Chem. Soc. Jpn. 2019, 92, 1754–1758. [Google Scholar] [CrossRef]
- Huang, L.; Moran, J.L.; Wang, W. Designing chemical micromotors that communicate-A survey of experiments. JCIS Open 2021, 2, 100006. [Google Scholar] [CrossRef]
- Chi, Q.; Wang, Z.; Tian, F.; You, J.A.; Xu, S. A Review of Fast Bubble-Driven Micromotors Powered by Biocompatible Fuel: Low-Concentration Fuel, Bioactive Fluid and Enzyme. Micromachines 2018, 9, 537. [Google Scholar] [CrossRef] [PubMed]
- Ou, J.; Liu, K.; Jiang, J.; Wilson, D.A.; Liu, L.; Wang, F.; Wang, S.; Tu, Y.; Peng, F. Micro-/Nanomotors toward Biomedical Applications: The Recent Progress in Biocompatibility. Small 2020, 16, 1906184. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Li, T.; Li, J.; Gao, W.; Xu, T.; Christianson, C.; Gao, W.; Galarnyk, M.; He, Q.; Zhang, L.; et al. Turning Erythrocytes into Functional Micromotors. ACS Nano 2014, 8, 12041–12048. [Google Scholar] [CrossRef] [PubMed]
- Huang, S.; Gao, Y.; Lv, Y.; Wang, Y.; Cao, Y.; Zhao, W.; Zuo, D.; Mu, H.; Hua, Y. Applications of Nano/Micromotors for Treatment and Diagnosis in Biological Lumens. Micromachines 2022, 13, 1780. [Google Scholar] [CrossRef]
- Panda, A.; Reddy, A.S.; Venkateswarlu, S.; Yoon, M. Bio-inspired self-propelled diatom micromotor by catalytic decomposition of H2O2 under low fuel concentration. Nanoscale 2018, 10, 16268–16277. [Google Scholar] [CrossRef] [PubMed]
- Patino, T.; Porchetta, A.; Jannasch, A.; Lladó, A.; Stumpp, T.; Schäffer, E.; Ricci, F.; Sánchez, S. Self-Sensing Enzyme-Powered Micromotors Equipped with pH-Responsive DNA Nanoswitches. Nano Lett. 2019, 19, 3440–3447. [Google Scholar] [CrossRef]
- Yang, Z.; Wang, L.; Gao, Z.; Hao, X.; Luo, M.; Yu, Z.; Guan, J. Ultrasmall Enzyme-Powered Janus Nanomotor Working in Blood Circulation System. ACS Nano 2023, 17, 6023–6035. [Google Scholar] [CrossRef] [PubMed]
- Aziz, A.; Holthof, J.; Meyer, S.; Schmidt, O.G.; Medina-Sánchez, M. Dual Ultrasound and Photoacoustic Tracking of Magnetically Driven Micromotors: From In Vitro to In Vivo. Adv. Healthc. Mater. 2021, 10, 2101077. [Google Scholar] [CrossRef] [PubMed]
- Luo, H.; Han, Y.; Hu, K.; Li, J.; Ng, D.H.L.; Ma, X.; Luan, K.; Yang, M. Synthesis of Dual Function Fe3O4@MnO2@HKUST-1 Magnetic Micromotors for Efficient Colorimetric Detection and Degradation of Hydroquinone. New J. Chem. 2023, 47, 1094–1104. [Google Scholar] [CrossRef]
- Li, J.; Mayorga-Martinez, C.C.; Ohl, C.-D.; Pumera, M. Ultrasonically Propelled Micro- and Nanorobots. Adv. Funct. Mater. 2022, 32, 2102265. [Google Scholar] [CrossRef]
- Valdez-Garduño, M.; Leal-Estrada, M.; Oliveros-Mata, E.S.; Sandoval-Bojorquez, D.I.; Soto, F.; Wang, J.; Garcia-Gradilla, V. Density Asymmetry Driven Propulsion of Ultrasound-Powered Janus Micromotors. Adv. Funct. Mater. 2020, 30, 2004043. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, W.; Wang, Z.; Zhu, Y.; Zhao, H.; Wu, K.; Wu, J.; Zhang, W.; Zhang, Q.; Guo, H.; et al. NIR-II Light Powered Asymmetric Hydrogel Nanomotors for Enhanced Immunochemotherapy. Angew. Chem. 2022, 135, e202212866. [Google Scholar] [CrossRef]
- Wang, H.; Gao, J.; Xu, C.; Jiang, Y.; Liu, M.; Qin, H.; Ye, Y.; Zhang, L.; Luo, W.; Chen, B.; et al. Light-Driven Biomimetic Nanomotors for Enhanced Photothermal Therapy. Small 2023, 2306208. [Google Scholar] [CrossRef]
- Wu, Z.; Esteban-Fernández de Ávila, B.; Martín, A.; Christianson, C.; Gao, W.; Thamphiwatana, S.K.; Escarpa, A.; He, Q.; Zhang, L.; Wang, J. RBC Micromotors Carrying Multiple Cargos Towards Potential Theranostic Applications. Nanoscale 2015, 7, 13680–13686. [Google Scholar] [CrossRef]
- Mayorga-Martinez, C.C.; Zelenka, J.; Grmela, J.; Michalkova, H.; Ruml, T.; Mareš, J.; Pumera, M. Swarming Aqua Sperm Micromotors for Active Bacterial Biofilms Removal in Confined Spaces. Adv. Sci. 2021, 8, 2101301. [Google Scholar] [CrossRef]
- Park, B.-W.; Zhuang, J.; Yasa, O.; Sitti, M. Multifunctional Bacteria-Driven Microswimmers for Targeted Active Drug Delivery. ACS Nano 2017, 11, 8910–8923. [Google Scholar] [CrossRef]
- Wu, J.; Ma, S.; Li, M.; Hu, X.; Jiao, N.; Tung, S.; Liu, L. Enzymatic/Magnetic Hybrid Micromotors for Synergistic Anticancer Therapy. ACS Appl. Mater. Interfaces 2021, 13, 31514–31526. [Google Scholar] [CrossRef] [PubMed]
- Evli, S.; Öndeş, B.; Uygun, M.; Uygun, D.A. Asparaginase Immobilized, Magnetically Guided, and Bubble-Propelled Micromotors. Process. Biochem. 2021, 108, 103–109. [Google Scholar] [CrossRef]
- Bußmann, A.B.; Durasiewicz, C.P.; Kibler, S.H.A.; Wald, C.K. Piezoelectric Titanium Based Microfluidic Pump and Valves for Implantable Medical Applications. Sens. Actuators A Phys. 2021, 323, 112649. [Google Scholar] [CrossRef]
- Asadi Dereshgi, H.; Dal, H.; Yildiz, M.Z. Piezoelectric Micropumps: State of The Art Review. Microsyst. Technol. 2021, 27, 4127–4155. [Google Scholar] [CrossRef]
- Wu, M.; Gao, Y.; Ghaznavi, A.; Zhao, W.; Xu, J. AC Electroosmosis Micromixing On a Lab-On-a-Foil Electric Microfluidic Device. Sens. Actuators B Chem. 2022, 359, 131611. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Pu, Q.; Liu, S. Advancement of electroosmotic pump in microflow analysis: A review. Anal. Chim. Acta 2019, 1060, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernández de Ávila, B.; Martín, A.; Soto, F.; Lopez-Ramirez, M.A.; Campuzano, S.; Vásquez-Machado, G.M.; Gao, W.; Zhang, L.; Wang, J. Single Cell Real-Time miRNAs Sensing Based on Nanomotors. ACS Nano 2015, 9, 6756–6764. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Xu, D.; Chen, J.; Peng, N.; Ma, T.; Liang, F. Nanozymatic magnetic nanomotors for enhancing photothermal therapy and targeting intracellular SERS sensing. Nanoscale 2023, 15, 12944–12953. [Google Scholar] [CrossRef]
- Zhang, Z.; Wang, H.; Yang, H.; Song, W.; Dai, L.; Yu, S.; Liu, X.; Li, T. Magnetic microswarm for MRI contrast enhancer. Chem. Asian J. 2022, 17, e202200561. [Google Scholar] [CrossRef]
- Feng, Y.; Chang, X.; Liu, H.; Hu, Y.; Li, T.; Li, L. Multi-response biocompatible Janus micromotor for ultrasonic imaging contrast enhancement. Appl. Mater. Today 2021, 23, 101026. [Google Scholar] [CrossRef]
- Medina-Sánchez, M.; Schmidt, O.G. Medical microbots need better imaging and control. Nature 2017, 545, 406–408. [Google Scholar] [CrossRef] [PubMed]
- Yuan, K.; Jiang, Z.; Jurado-Sánchez, B.A.-O.; Escarpa, A.A.-O. Nano/Micromotors for Diagnosis and Therapy of Cancer and Infectious Diseases. Chem. Eur. J. 2020, 26, 2309–2326. [Google Scholar] [CrossRef] [PubMed]
- Liu, K.; Ou, J.; Wang, S.; Gao, J.; Liu, L.; Ye, Y.; Wilson, D.A.; Hu, Y.; Peng, F.; Tu, Y. Magnesium-based micromotors for enhanced active and synergistic hydrogen chemotherapy. Appl. Mater. Today 2020, 20, 100694. [Google Scholar] [CrossRef]
- Zhou, M.; Hou, T.; Li, J.; Yu, S.; Xu, Z.; Yin, M.; Wang, J.; Wang, X. Self-Propelled and Targeted Drug Delivery of Poly(aspartic acid)/Iron–Zinc Microrocket in the Stomach. ACS Nano 2019, 13, 1324–1332. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Zhang, B.; Liang, R.; Ran, H.; Zhu, D.; Ren, J.; Liu, L.; Ma, A.; Cai, L. A Dual-Biomineralized Yeast Micro-/Nanorobot with Self-Driving Penetration for Gastritis Therapy and Motility Recovery. ACS Nano 2023, 17, 6410–6422. [Google Scholar] [CrossRef]
- Fu, D.; Wang, Z.; Tu, Y.; Peng, F. Interactions between Biomedical Micro-/Nano-Motors and the Immune Molecules, Immune Cells, and the Immune System: Challenges and Opportunities. Adv. Healthc. Mater. 2021, 10, 2001788. [Google Scholar] [CrossRef] [PubMed]
- Arqué, X.; Romero-Rivera, A.; Feixas, F.; Patiño, T.; Osuna, S.; Sánchez, S. Intrinsic enzymatic properties modulate the self-propulsion of micromotors. Nat. Commun. 2019, 10, 2826. [Google Scholar] [CrossRef] [PubMed]
- Esteban-Fernández de Ávila, B.; Gao, W.; Karshalev, E.; Zhang, L.; Wang, J. Cell-Like Micromotors. Acc. Chem. Res. 2018, 51, 1901–1910. [Google Scholar] [CrossRef]
- Zhang, F.; Mundaca-Uribe, R.; Askarinam, N.; Li, Z.; Gao, W.; Zhang, L.; Wang, J. Biomembrane-Functionalized Micromotors: Biocompatible Active Devices for Diverse Biomedical Applications. Adv. Mater. 2022, 34, 2107177. [Google Scholar] [CrossRef]
- Gao, C.; Lin, Z.; Lin, X.; He, Q. Cell Membrane-Camouflaged Colloid Motors for Biomedical Applications. Adv. Ther. 2018, 1, 1800056. [Google Scholar] [CrossRef]
- Zeng, S.; Tang, Q.; Xiao, M.; Tong, X.; Yang, T.; Yin, D.; Lei, L.; Li, S. Cell membrane-coated nanomaterials for cancer therapy. Mater. Today Bio 2023, 20, 100633. [Google Scholar] [CrossRef]
- Hou, K.; Zhang, Y.; Bao, M.; Xin, C.; Wei, Z.; Lin, G.; Wang, Z. A Multifunctional Magnetic Red Blood Cell-Mimetic Micromotor for Drug Delivery and Image-Guided Therapy. ACS Appl. Mater. Interfaces 2022, 14, 3825–3837. [Google Scholar] [CrossRef] [PubMed]
- Li, T.; Yu, S.; Sun, B.; Li, Y.; Wang, X.; Pan, Y.; Song, C.; Ren, Y.; Zhang, Z.; Grattan, K.T.V.; et al. Bioinspired claw-engaged and biolubricated swimming microrobots creating active retention in blood vessels. Sci. Adv. 2023, 9, eadg4501. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Z.; Wu, Z.; He, Q. Cancer Cell Membrane-Camouflaged Micromotor. Adv. Ther. 2019, 2, 1900096. [Google Scholar] [CrossRef]
- Wang, L.; Guo, P.; Jin, D.; Peng, Y.; Sun, X.; Chen, Y.; Liu, X.; Chen, W.; Wang, W.; Yan, X.; et al. Enzyme-Powered Tubular Microrobotic Jets as Bioinspired Micropumps for Active Transmembrane Drug Transport. ACS Nano 2023, 17, 5095–5107. [Google Scholar] [CrossRef] [PubMed]
- You, Y.; Xu, D.; Pan, X.; Ma, X. Self-propelled enzymatic nanomotors for enhancing synergetic photodynamic and starvation therapy by self-accelerated cascade reactions. Appl. Mater. Today 2019, 16, 508–517. [Google Scholar] [CrossRef]
- Tang, S.; Zhang, F.; Gong, H.; Wei, F.; Zhuang, J.; Karshalev, E.; Esteban-Fernández de Ávila, B.; Huang, C.; Zhou, Z.; Li, Z.; et al. Enzyme-powered Janus platelet cell robots for active and targeted drug delivery. Sci. Robot. 2020, 5, eaba6137. [Google Scholar] [CrossRef] [PubMed]
- Fu, S.; Zhang, X.; Xie, Y.; Wu, J.; Ju, H. An efficient enzyme-powered micromotor device fabricated by cyclic alternate hybridization assembly for DNA detection. Nanoscale 2017, 9, 9026–9033. [Google Scholar] [CrossRef]
- Bastos-Arrieta, J.; Revilla-Guarinos, A.; Uspal, W.E.; Simmchen, J. Bacterial Biohybrid Microswimmers. Front. Robot. AI 2018, 5, 97. [Google Scholar] [CrossRef]
- Xiao, S.; Shi, H.; Zhang, Y.; Fan, Y.; Wang, L.; Xiang, L.; Liu, Y.; Zhao, L.; Fu, S. Bacteria-driven hypoxia targeting delivery of chemotherapeutic drug proving outcome of breast cancer. J. Nanobiotechnol. 2022, 20, 178. [Google Scholar] [CrossRef]
- Chen, H.; Li, Y.; Wang, Y.; Ning, P.; Shen, Y.; Wei, X.; Feng, Q.; Liu, Y.; Li, Z.; Xu, C.; et al. An Engineered Bacteria-Hybrid Microrobot with the Magnetothermal Bioswitch for Remotely Collective Perception and Imaging-Guided Cancer Treatment. ACS Nano 2022, 16, 6118–6133. [Google Scholar] [CrossRef]
- Debasmita, D.; Ghosh, S.S.; Chattopadhyay, A. Living Gut Bacteria Functionalized with Gold Nanoclusters and Drug for Facile Cancer Theranostics. ACS Appl. Bio Mater. 2023, 6, 628–639. [Google Scholar] [CrossRef] [PubMed]
- Akolpoglu, M.B.; Alapan, Y.; Dogan, N.O.; Baltaci, S.F.; Yasa, O.; Aybar Tural, G.; Sitti, M. Magnetically steerable bacterial microrobots moving in 3D biological matrices for stimuli-responsive cargo delivery. Sci. Adv. 2022, 8, eabo6163. [Google Scholar] [CrossRef] [PubMed]
- Magdanz, V.; Medina-Sánchez, M.; Schwarz, L.; Xu, H.; Elgeti, J.; Schmidt, O.G. Spermatozoa as Functional Components of Robotic Microswimmers. Adv. Mater. 2017, 29, 1606301. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Medina-Sánchez, M.; Magdanz, V.; Schwarz, L.; Hebenstreit, F.; Schmidt, O.G. Sperm-Hybrid Micromotor for Targeted Drug Delivery. ACS Nano 2018, 12, 327–337. [Google Scholar] [CrossRef] [PubMed]
- Chen, Q.; Tang, S.; Li, Y.; Cong, Z.; Lu, D.; Yang, Q.; Zhang, X.; Wu, S. Multifunctional Metal–Organic Framework Exoskeletons Protect Biohybrid Sperm Microrobots for Active Drug Delivery from the Surrounding Threats. ACS Appl. Mater. Interfaces 2021, 13, 58382–58392. [Google Scholar] [CrossRef] [PubMed]
- McNeill, J.M.; Mallouk, T.E. Acoustically Powered Nano- and Microswimmers: From Individual to Collective Behavior. ACS Nanosci. Au 2023, 3, 424–440. [Google Scholar] [CrossRef] [PubMed]
- Ye, J.; Fu, Q.; Liu, L.; Chen, L.; Zhang, X.; Li, Q.; Li, Z.; Su, L.; Zhu, R.; Song, J.; et al. Ultrasound-propelled Janus Au NR-mSiO2 nanomotor for NIR-II photoacoustic imaging guided sonodynamic-gas therapy of large tumors. Sci. China Chem. 2021, 64, 2218–2229. [Google Scholar] [CrossRef]
- Huang, D.; Cai, L.; Li, N.; Zhao, Y. Ultrasound-trigged micro/nanorobots for biomedical applications. Smart Med. 2023, 2, e20230003. [Google Scholar] [CrossRef]
- Fakhfouri, A.; Colditz, M.; Devendran, C.; Ivanova, K.; Jacob, S.; Neild, A.; Winkler, A. Fully Microfabricated Surface Acoustic Wave Tweezer for Collection of Submicron Particles and Human Blood Cells. ACS Appl. Mater. Interfaces 2023, 15, 24023–24033. [Google Scholar] [CrossRef]
- Celik Cogal, G.; Das, P.K.; Yurdabak Karaca, G.; Bhethanabotla, V.R.; Uygun Oksuz, A. Fluorescence Detection of miRNA-21 Using Au/Pt Bimetallic Tubular Micromotors Driven by Chemical and Surface Acoustic Wave Forces. ACS Appl. Bio Mater. 2021, 4, 7932–7941. [Google Scholar] [CrossRef] [PubMed]
- Sabrina, S.; Tasinkevych, M.; Ahmed, S.; Brooks, A.M.; Olvera de la Cruz, M.; Mallouk, T.E.; Bishop, K.J.M. Shape-Directed Microspinners Powered by Ultrasound. ACS Nano 2018, 12, 2939–2947. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Castro, L.A.; Hoyos, M.; Mallouk, T.E. Autonomous Motion of Metallic Microrods Propelled by Ultrasound. ACS Nano 2012, 6, 6122–6132. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Liu, X.; Qi, Y.; Liu, Z.; Cai, Y.; Dong, R. Ultrasound-propelled nanomotors for improving antigens cross-presentation and cellular immunity. Chem. Eng. J. 2021, 416, 129091. [Google Scholar] [CrossRef]
- Cao, Y.; Liu, S.; Ma, Y.; Ma, L.; Zu, M.; Sun, J.; Dai, F.; Duan, L.; Xiao, B. Oral Nanomotor-Enabled Mucus Traverse and Tumor Penetration for Targeted Chemo-Sono-Immunotherapy against Colon Cancer. Small 2022, 18, 2203466. [Google Scholar] [CrossRef] [PubMed]
- Yuan, K.; Bujalance-Fernández, J.; Jurado-Sánchez, B.; Escarpa, A. Light-driven nanomotors and micromotors: Envisioning new analytical possibilities for bio-sensing. Microchim. Acta 2020, 187, 581. [Google Scholar] [CrossRef] [PubMed]
- Villa, K.; Pumera, M. Fuel-free light-driven micro/nanomachines: Artificial active matter mimicking nature. Chem. Soc. Rev. 2019, 48, 4966–4978. [Google Scholar] [CrossRef] [PubMed]
- Zhou, X.; Li, Z.; Tan, L.; Zhang, Y.; Jiao, Y. Near-Infrared Light-Steered Graphene Aerogel Micromotor with High Speed and Precise Navigation for Active Transport and Microassembly. ACS Appl. Mater. Interfaces 2020, 12, 23134–23144. [Google Scholar] [CrossRef]
- Zhao, Y.; Yuan, M.; Yang, H.; Li, J.; Ying, Y.; Li, J.; Wang, W.; Wang, S. Versatile Multi-Wavelength Light-Responsive Metal-Organic Frameworks Micromotor through Porphyrin Metalation for Water Sterilization. Small 2023, 2305189. [Google Scholar] [CrossRef]
- Huang, H.; Zhao, Y.; Yang, H.; Li, J.; Ying, Y.; Li, J.; Wang, S. Light-driven MOF-based micromotors with self-floating characteristics for water sterilization. Nanoscale 2023, 15, 14165–14174. [Google Scholar] [CrossRef]
- Villa, K. Exploring innovative designs and heterojunctions in photocatalytic micromotors. Chem. Commun. 2023, 59, 8375–8383. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Chen, M.; Lee, H.; Feng, S.-P.; Park, J.Y.; Lee, S.; Kim, J.T. X-ray-Powered Micromotors. ACS Appl. Mater. Interfaces 2019, 11, 15727–15732. [Google Scholar] [CrossRef] [PubMed]
- Rojas, D.; Kuthanova, M.; Dolezelikova, K.; Pumera, M. Facet nanoarchitectonics of visible-light driven Ag3PO4 photocatalytic micromotors: Tuning motion for biofilm eradication. NPG Asia Mater. 2022, 14, 63. [Google Scholar] [CrossRef]
- Chen, Z.; Jiang, J.; Wang, X.; Zhang, H.; Song, B.; Dong, B. Visible light-regulated BiVO4-based micromotor with biomimetic ‘predator-bait’ behavior. J. Mater. Sci. 2022, 57, 4092–4103. [Google Scholar] [CrossRef]
- Lin, J.; Xiong, K.; Hu, J.; Li, Z.; Xu, L.; Guan, J. Micromotors with Spontaneous Multipattern Motion and Microvortex for Enhanced “On-the-Fly” Molecule Enrichment. Adv. Intell. Syst. 2023, 5, 2300386. [Google Scholar] [CrossRef]
- Gao, C.; Feng, Y.; Liu, S.; Fu, D.; Chen, B.; Du, D.; Zhang, W.; Gao, Z.; Yang, H.; Wilson, D.A.; et al. Water-Powered Cu@MoS2 Micromotor Swarm For a Collaborative Oscillation of Living Cells. Matter 2023, 6, 3956–3974. [Google Scholar] [CrossRef]
- Feng, K.; Gong, J.; Qu, J.; Niu, R. Dual-Mode-Driven Micromotor Based on Foam-like Carbon Nitride and Fe3O4 with Improved Manipulation and Photocatalytic Performance. ACS Appl. Mater. Interfaces 2022, 14, 44271–44281. [Google Scholar] [CrossRef]
- Zhang, J.; Laskar, A.; Song, J.; Shklyaev, O.E.; Mou, F.; Guan, J.; Balazs, A.C.; Sen, A. Light-Powered, Fuel-Free Oscillation, Migration, and Reversible Manipulation of Multiple Cargo Types by Micromotor Swarms. ACS Nano 2023, 17, 251–262. [Google Scholar] [CrossRef]
- Zhan, Z.; Wei, F.; Zheng, J.; Yin, C.; Yang, W.; Yao, L.; Tang, S.; Liu, D. Visible light driven recyclable micromotors for “on-the-fly” water remediation. Mater. Lett. 2020, 258, 126825. [Google Scholar] [CrossRef]
- He, X.; Jiang, H.; Li, J.; Ma, Y.; Fu, B.; Hu, C. Dipole-Moment Induced Phototaxis and Fuel-Free Propulsion of ZnO/Pt Janus Micromotors. Small 2021, 17, 2101388. [Google Scholar] [CrossRef]
- Chen, X.; Ding, X.; Liu, Y.; Li, J.; Liu, W.; Lu, X.; Gu, Z. Highly efficient visible-light-driven Cu2O@CdSe micromotors adsorbent. Appl. Mater. Today 2021, 25, 101200. [Google Scholar] [CrossRef]
- Catchmark, J.M.; Subramanian, S.; Sen, A. Directed Rotational Motion of Microscale Objects Using Interfacial Tension Gradients Continually Generated via Catalytic Reactions. Small 2005, 1, 202–206. [Google Scholar] [CrossRef] [PubMed]
- Xing, Y.; Xiu, J.; Zhou, M.; Xu, T.; Zhang, M.; Li, H.; Li, X.; Du, X.; Ma, T.; Zhang, X. Copper Single-Atom Jellyfish-like Nanomotors for Enhanced Tumor Penetration and Nanocatalytic Therapy. ACS Nano 2023, 17, 6789–6799. [Google Scholar] [CrossRef] [PubMed]
- Kong, L.; Mayorga-Martinez, C.C.; Guan, J.; Pumera, M. Photocatalytic Micromotors Activated by UV to Visible Light for Environmental Remediation, Micropumps, Reversible Assembly, Transportation, and Biomimicry. Small 2020, 16, 1903179. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Mou, F.; Gong, H.; Luo, M.; Guan, J. Light-driven micro/nanomotors: From fundamentals to applications. Chem. Soc. Rev. 2017, 46, 6905–6926. [Google Scholar] [CrossRef] [PubMed]
- Sridhar, V.; Podjaski, F.; Alapan, Y.; Kröger, J.; Grunenberg, L.; Kishore, V.; Lotsch, B.V.; Sitti, M. Light-driven carbon nitride microswimmers with propulsion in biological and ionic media and responsive on-demand drug delivery. Sci. Robot. 2022, 7, eabm1421. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Yakov, S.; Fu, A.; Yossifon, G. A Magnetically and Electrically Powered Hybrid Micromotor in Conductive Solutions: Synergistic Propulsion Effects and Label-Free Cargo Transport and Sensing. Adv. Sci. 2023, 10, 2204931. [Google Scholar] [CrossRef] [PubMed]
- Zhou, H.; Mayorga-Martinez, C.C.; Pané, S.; Zhang, L.; Pumera, M. Magnetically Driven Micro and Nanorobots. Chem. Rev. 2021, 121, 4999–5041. [Google Scholar] [CrossRef]
- Yang, J.; Li, J.; Yan, X.; Lyu, Y.; Xing, N.; Yang, P.; Song, P.; Zuo, M. Three-Dimensional Hierarchical HRP-MIL-100(Fe)@TiO2@Fe3O4 Janus Magnetic Micromotor as a Smart Active Platform for Detection and Degradation of Hydroquinone. ACS Appl. Mater. Interfaces 2022, 14, 6484–6498. [Google Scholar] [CrossRef]
- Liu, L.; Chen, B.; Liu, K.; Gao, J.; Ye, Y.; Wang, Z.; Qin, N.; Wilson, D.A.; Tu, Y.; Peng, F. Wireless Manipulation of Magnetic/Piezoelectric Micromotors for Precise Neural Stem-Like Cell Stimulation. Adv. Funct. Mater. 2020, 30, 1910108. [Google Scholar] [CrossRef]
- Hoop, M.; Shen, Y.; Chen, X.-Z.; Mushtaq, F.; Iuliano, L.M.; Sakar, M.S.; Petruska, A.; Loessner, M.J.; Nelson, B.J.; Pané, S. Magnetically Driven Silver-Coated Nanocoils for Efficient Bacterial Contact Killing. Adv. Funct. Mater. 2016, 26, 1063–1069. [Google Scholar] [CrossRef]
- Kadiri, V.M.; Bussi, C.; Holle, A.W.; Son, K.; Kwon, H.; Schütz, G.; Gutierrez, M.G.; Fischer, P. Biocompatible Magnetic Micro- and Nanodevices: Fabrication of FePt Nanopropellers and Cell Transfection. Adv. Mater. 2020, 32, 2001114. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Gao, C.; Xie, D.; Liu, L.; Chen, B.; Liu, S.; Yang, H.; Gao, Z.; Wilson, D.A.; Tu, Y.; et al. Directed Neural Stem Cells Differentiation via Signal Communication with Ni–Zn Micromotors. Adv. Mater. 2023, 35, 2301736. [Google Scholar] [CrossRef]
- Bozuyuk, U.; Yasa, O.; Yasa, I.C.; Ceylan, H.; Kizilel, S.; Sitti, M. Light-Triggered Drug Release from 3D-Printed Magnetic Chitosan Microswimmers. ACS Nano 2018, 12, 9617–9625. [Google Scholar] [CrossRef] [PubMed]
- Ceylan, H.; Yasa, I.C.; Yasa, O.; Tabak, A.F.; Giltinan, J.; Sitti, M. 3D-Printed Biodegradable Microswimmer for Theranostic Cargo Delivery and Release. ACS Nano 2019, 13, 3353–3362. [Google Scholar] [CrossRef]
- Zhang, X.; Chen, G.; Cai, L.; Fan, L.; Zhao, Y. Dip-Printed Microneedle Motors for Oral Macromolecule Delivery. Research 2022, 2022, 9797482. [Google Scholar] [CrossRef] [PubMed]
- Song, X.; Fu, W.; Cheang, U.K. Immunomodulation and delivery of macrophages using nano-smooth drug-loaded magnetic microrobots for dual targeting cancer therapy. iScience 2022, 25, 104507. [Google Scholar] [CrossRef] [PubMed]
- Fan, Q.; Lu, J.; Jia, J.; Qu, J. 2D Magnetic Manipulation of a Micro-Robot in Glycerin Using Six Pairs of Magnetic Coils. Micromachines 2022, 13, 2144. [Google Scholar] [CrossRef]
- Jeon, S.; Jang, G.; Choi, H.; Park, S. Magnetic Navigation System with Gradient and Uniform Saddle Coils for the Wireless Manipulation of Micro-Robots in Human Blood Vessels. IEEE Trans. Magn. 2010, 46, 1943–1946. [Google Scholar] [CrossRef]
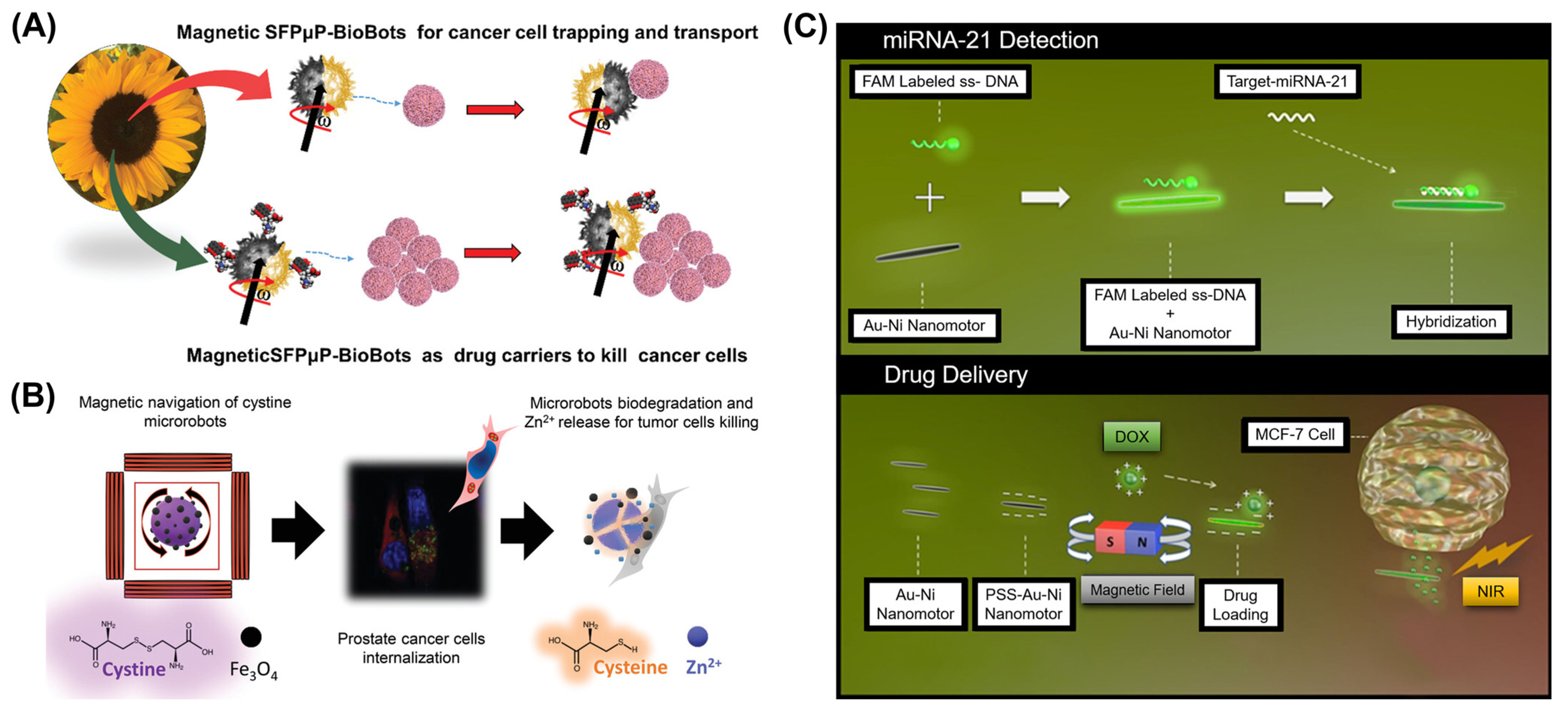
- Mayorga-Martinez, C.C.; Fojtů, M.; Vyskočil, J.; Cho, N.-J.; Pumera, M. Pollen-Based Magnetic Microrobots are Mediated by Electrostatic Forces to Attract, Manipulate, and Kill Cancer Cells. Adv. Funct. Mater. 2022, 32, 2207272. [Google Scholar] [CrossRef]
- Ussia, M.; Urso, M.; Kratochvilova, M.; Navratil, J.; Balvan, J.; Mayorga-Martinez, C.C.; Vyskocil, J.; Masarik, M.; Pumera, M. Magnetically Driven Self-Degrading Zinc-Containing Cystine Microrobots for Treatment of Prostate Cancer. Small 2023, 19, 2208259. [Google Scholar] [CrossRef] [PubMed]
- Karaca, G.Y.; Kuralay, F.; Uygun, E.; Ozaltin, K.; Demirbuken, S.E.; Garipcan, B.; Oksuz, L.; Oksuz, A.U. Gold–Nickel Nanowires as Nanomotors for Cancer Marker Biodetection and Chemotherapeutic Drug Delivery. ACS Appl. Nano Mater. 2021, 4, 3377–3388. [Google Scholar] [CrossRef]
- Xing, Y.; Zhou, M.; Liu, X.; Qiao, M.; Zhou, L.; Xu, T.; Zhang, X.; Du, X. Bioinspired Jellyfish-like Carbon/Manganese nanomotors with H2O2 and NIR light Dual-propulsion for enhanced tumor penetration and chemodynamic therapy. Chem. Eng. J. 2023, 461, 142142. [Google Scholar] [CrossRef]
- Tang, G.; Chen, L.; Lian, L.; Li, F.; Ravanbakhsh, H.; Wang, M.; Zhang, Y.S.; Huang, C. Designable dual-power micromotors fabricated from a biocompatible gas-shearing strategy. Chem. Eng. J. 2021, 407, 127187. [Google Scholar] [CrossRef]
- Wang, D.; Zhao, G.; Chen, C.; Zhang, H.; Duan, R.; Zhang, D.; Li, M.; Dong, B. One-Step Fabrication of Dual Optically/Magnetically Modulated Walnut-like Micromotor. Langmuir 2019, 35, 2801–2807. [Google Scholar] [CrossRef]
- Wang, W.; Duan, W.; Zhang, Z.; Sun, M.; Sen, A.; Mallouk, T.E. A tale of two forces: Simultaneous chemical and acoustic propulsion of bimetallic micromotors. Chem. Commun. 2015, 51, 1020–1023. [Google Scholar] [CrossRef]
- Garcia-Gradilla, V.; Orozco, J.; Sattayasamitsathit, S.; Soto, F.; Kuralay, F.; Pourazary, A.; Katzenberg, A.; Gao, W.; Shen, Y.; Wang, J. Functionalized Ultrasound-Propelled Magnetically Guided Nanomotors: Toward Practical Biomedical Applications. ACS Nano 2013, 7, 9232–9240. [Google Scholar] [CrossRef]
- Tang, S.; Zhang, F.; Zhao, J.; Talaat, W.; Soto, F.; Karshalev, E.; Chen, C.; Hu, Z.; Lu, X.; Li, J.; et al. Structure-Dependent Optical Modulation of Propulsion and Collective Behavior of Acoustic/Light-Driven Hybrid Microbowls. Adv. Funct. Mater. 2019, 29, 1809003. [Google Scholar] [CrossRef]
- Gao, C.; Lin, Z.; Wang, D.; Wu, Z.; Xie, H.; He, Q. Red Blood Cell-Mimicking Micromotor for Active Photodynamic Cancer Therapy. ACS Appl. Mater. Interfaces 2019, 11, 23392–23400. [Google Scholar] [CrossRef]
- Peng, X.; Urso, M.; Balvan, J.; Masarik, M.; Pumera, M. Self-Propelled Magnetic Dendrite-Shaped Microrobots for Photodynamic Prostate Cancer Therapy. Angew. Chem. 2022, 61, e202213505. [Google Scholar] [CrossRef]
- Báez, D.F.; Ramos, G.; Corvalán, A.; Cordero, M.L.; Bollo, S.; Kogan, M.J. Effects of Preparation on Catalytic, Magnetic and Hybrid Micromotors on Their Functional Features and Application in Gastric Cancer Biomarker Detection. Sens. Actuators B Chem. 2020, 310, 127843. [Google Scholar] [CrossRef]
- Ren, J.; Chen, Z.; Ma, E.; Wang, W.; Zheng, S.; Wang, H. Dual-source powered nanomotors coupled with dual-targeting ligands for efficient capture and detection of CTCs in whole blood and in vivo tumor imaging. Colloids Surf. B-Biointerfaces 2023, 231, 113568. [Google Scholar] [CrossRef] [PubMed]
- Chen, H.; Zhang, H.; Xu, T.; Yu, J. An Overview of Micronanoswarms for Biomedical Applications. ACS Nano 2021, 15, 15625–15644. [Google Scholar] [CrossRef] [PubMed]
- Warren, J.B. Translating the dose response into risk and benefit. Br. J. Clin. Pharmacol. 2019, 85, 2187–2193. [Google Scholar] [CrossRef] [PubMed]
- Yuan, K.; Pacheco, M.; Jurado-Sánchez, B.; Escarpa, A. Design and Control of the Micromotor Swarm Toward Smart Applications. Adv. Intell. Syst. 2021, 3, 2100002. [Google Scholar] [CrossRef]
- Wang, B.; Chan, K.F.; Yu, J.; Wang, Q.; Yang, L.; Chiu, P.W.Y.; Zhang, L. Reconfigurable Swarms of Ferromagnetic Colloids for Enhanced Local Hyperthermia. Adv. Funct. Mater. 2018, 28, 1705701. [Google Scholar] [CrossRef]
- Zhang, J.; Mou, F.; Wu, Z.; Song, J.; Kauffman, J.E.; Sen, A.; Guan, J. Cooperative transport by flocking phototactic micromotors. Nanoscale Adv. 2021, 3, 6157–6163. [Google Scholar] [CrossRef]
- Law, J.; Yu, J.; Tang, W.; Gong, Z.; Wang, X.; Sun, Y. Micro/Nanorobotic Swarms: From Fundamentals to Functionalities. ACS Nano 2023, 17, 12971–12999. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Yu, J.; Chiu, P.W.Y.; Zheng, Y.P.; Zhang, L. Real-Time Magnetic Navigation of a Rotating Colloidal Microswarm Under Ultrasound Guidance. IEEE Trans. Biomed. Eng. 2020, 67, 3403–3412. [Google Scholar] [CrossRef]
- Wang, J.; Dong, Y.; Ma, P.; Wang, Y.; Zhang, F.; Cai, B.; Chen, P.; Liu, B.-F. Intelligent Micro-/Nanorobots for Cancer Theragnostic. Adv. Mater. 2022, 34, 2201051. [Google Scholar] [CrossRef]
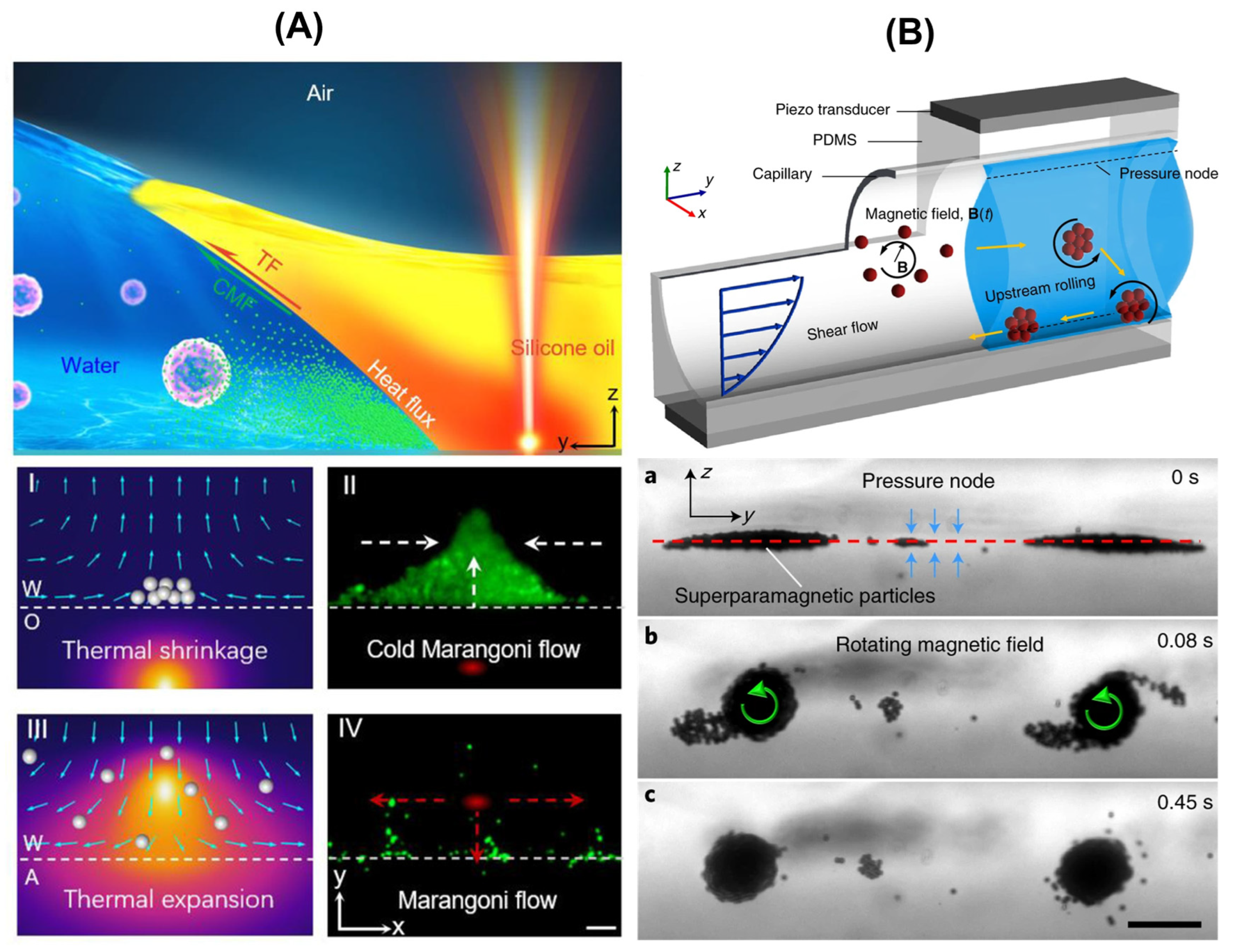
- Shi, Y.; Wang, D.; Xiao, Y.; Pan, T.; Lu, D.; Zhu, G.; Xiong, J.; Li, B.; Xin, H. Light-Induced Cold Marangoni Flow for Microswarm Actuation: From Intelligent Behaviors to Collective Drug Delivery. Laser Photonics Rev. 2022, 16, 2270062. [Google Scholar] [CrossRef]
- Ahmed, D.; Sukhov, A.; Hauri, D.; Rodrigue, D.; Maranta, G.; Harting, J.; Nelson, B.J. Bioinspired acousto-magnetic microswarm robots with upstream motility. Nat. Mach. Intell. 2021, 3, 116–124. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Chan, K.F.; Schweizer, K.; Du, X.; Jin, D.; Yu, S.C.H.; Nelson, B.J.; Zhang, L. Ultrasound Doppler-guided real-time navigation of a magnetic microswarm for active endovascular delivery. Sci. Adv. 2021, 7, eabe5914. [Google Scholar] [CrossRef] [PubMed]
- Hortelao, A.C.; Simó, C.; Guix, M.; Guallar-Garrido, S.; Julián, E.; Vilela, D.; Rejc, L.; Ramos-Cabrer, P.; Cossío, U.; Gómez-Vallejo, V.; et al. Swarming behavior and in vivo monitoring of enzymatic nanomotors within the bladder. Sci. Robot. 2021, 6, eabd2823. [Google Scholar] [CrossRef]
- Yu, J.; Zhao, F.; Gao, W.; Yang, X.; Ju, Y.; Zhao, L.; Guo, W.; Xie, J.; Liang, X.-j.; Tao, X.; et al. Magnetic Reactive Oxygen Species Nanoreactor for Switchable Magnetic Resonance Imaging Guided Cancer Therapy Based on pH-Sensitive Fe5C2@Fe3O4 Nanoparticles. ACS Nano 2019, 13, 10002–10014. [Google Scholar] [CrossRef] [PubMed]
- Sun, Z.; Wang, T.; Wang, J.; Xu, J.; Shen, T.; Zhang, T.; Zhang, B.; Gao, S.; Zhao, C.; Yang, M.; et al. Self-Propelled Janus Nanocatalytic Robots Guided by Magnetic Resonance Imaging for Enhanced Tumor Penetration and Therapy. J. Am. Chem. Soc. 2023, 145, 11019–11032. [Google Scholar] [CrossRef] [PubMed]
- Xu, H.; Medina-Sánchez, M.; Zhang, W.; Seaton, M.P.H.; Brison, D.R.; Edmondson, R.J.; Taylor, S.S.; Nelson, L.; Zeng, K.; Bagley, S.; et al. Human spermbots for patient-representative 3D ovarian cancer cell treatment. Nanoscale 2020, 12, 20467–20481. [Google Scholar] [CrossRef]
- Wang, B.; Qin, Y.; Liu, J.; Zhang, Z.; Li, W.; Pu, G.; Yuanhe, Z.; Gui, X.; Chu, M. Magnetotactic Bacteria-Based Drug-Loaded Micromotors for Highly Efficient Magnetic and Biological Double-Targeted Tumor Therapy. ACS Appl. Mater. Interfaces 2023, 15, 2747–2759. [Google Scholar] [CrossRef]
- Qin, F.; Wu, J.; Fu, D.; Feng, Y.; Gao, C.; Xie, D.; Fu, S.; Liu, S.; Wilson, D.A.; Peng, F. Magnetically driven helical hydrogel micromotor for tumor DNA detection. Appl. Mater. Today 2022, 27, 101456. [Google Scholar] [CrossRef]
- Yu, Z.; Li, L.; Mou, F.; Yu, S.; Zhang, D.; Yang, M.; Zhao, Q.; Ma, H.; Luo, W.; Li, T.; et al. Swarming magnetic photonic-crystal microrobots with on-the-fly visual pH detection and self-regulated drug delivery. InfoMat 2023, 5, e12464. [Google Scholar] [CrossRef]
- Beltrán-Gastélum, M.; Esteban-Fernández de Ávila, B.; Gong, H.; Venugopalan, P.L.; Hianik, T.; Wang, J.; Subjakova, V. Rapid Detection of AIB1 in Breast Cancer Cells Based on Aptamer-Functionalized Nanomotors. ChemPhysChem 2019, 20, 3177–3180. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Song, W.; Xu, J.; Wu, T.; Gong, Z.; Li, Y.; Li, B.; Zhang, Y. Light-driven upconversion fluorescence micromotors. Biosens. Bioelectron. 2023, 221, 114931. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Fu, S.; Li, H.; Chen, B.; Xie, D.; Fu, D.; Feng, Y.; Gao, C.; Liu, S.; Wilson, D.A.; et al. Light-driven micromotor swarm induced in-situ polymerization and synergistic photothermal therapy. Chem. Eng. J. 2023, 468, 143393. [Google Scholar] [CrossRef]
- Zhou, X.; Huang, X.; Wang, B.; Tan, L.; Zhang, Y.; Jiao, Y. Light/gas cascade-propelled Janus micromotors that actively overcome sequential and multi-staged biological barriers for precise drug delivery. Chem. Eng. J. 2021, 408, 127897. [Google Scholar] [CrossRef]
- De Ávila, B.E.-F.; Angsantikul, P.; Li, J.; Angel Lopez-Ramirez, M.; Ramírez-Herrera, D.E.; Thamphiwatana, S.; Chen, C.; Delezuk, J.; Samakapiruk, R.; Ramez, V.; et al. Micromotor-enabled active drug delivery for in vivo treatment of stomach infection. Nat. Commun. 2017, 8, 272. [Google Scholar] [CrossRef]
- Wu, Z.; Troll, J.; Jeong, H.-H.; Wei, Q.; Stang, M.; Ziemssen, F.; Wang, Z.; Dong, M.; Schnichels, S.; Qiu, T.; et al. A swarm of slippery micropropellers penetrates the vitreous body of the eye. Sci. Adv. 2018, 4, eaat4388. [Google Scholar] [CrossRef]
- Li, D.; Liu, C.; Yang, Y.; Wang, L.; Shen, Y. Micro-rocket robot with all-optic actuating and tracking in blood. Light Sci. Appl. 2020, 9, 84. [Google Scholar] [CrossRef]
- Kagan, D.; Calvo-Marzal, P.; Balasubramanian, S.; Sattayasamitsathit, S.; Manesh, K.M.; Flechsig, G.-U.; Wang, J. Chemical Sensing Based on Catalytic Nanomotors: Motion-Based Detection of Trace Silver. J. Am. Chem. Soc. 2009, 131, 12082–12083. [Google Scholar] [CrossRef]
- Cogal, G.C.; Karaca, G.Y.; Uygun, E.; Kuralay, F.; Oksuz, L.; Remskar, M.; Oksuz, A.U. RF plasma-enhanced conducting Polymer/W5O14 based self-propelled micromotors for miRNA detection. Anal. Chim. Acta 2020, 1138, 69–78. [Google Scholar] [CrossRef]
- Van Nguyen, K.; Minteer, S.D. DNA-functionalized Pt nanoparticles as catalysts for chemically powered micromotors: Toward signal-on motion-based DNA biosensor. Chem. Commun. 2015, 51, 4782–4784. [Google Scholar] [CrossRef]
- Jiang, L.; Liu, X.; Zhao, D.; Guo, J.; Ma, X.; Wang, Y. Intelligent sensing based on active micro/nanomotors. J. Mater. Chem. B 2023, 11, 8897–8915. [Google Scholar] [CrossRef] [PubMed]
- Guo, J.; Liang, Z.; Huang, Y.; Kim, K.; Vandeventer, P.; Fan, D. Acceleration of Biomolecule Enrichment and Detection with Rotationally Motorized Opto-Plasmonic Microsensors and the Working Mechanism. ACS Nano 2020, 14, 15204–15215. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Yang, F.; Wei, W.; Wang, Y.; Yang, S.; Li, J.; Xing, Y.; Zhou, L.; Dai, W.; Dong, H. Self-Propelled Janus Mesoporous Micromotor for Enhanced MicroRNA Capture and Amplified Detection in Complex Biological Samples. ACS Nano 2022, 16, 5587–5596. [Google Scholar] [CrossRef] [PubMed]
- Wang, Q.; Ji, F.; Wang, S.; Zhang, L. Accelerating the Fenton Reaction with a Magnetic Microswarm for Enhanced Water Remediation. ChemNanoMat 2021, 7, 600–606. [Google Scholar] [CrossRef]
- Christensen-Jeffries, K.; Couture, O.; Dayton, P.A.; Eldar, Y.C.; Hynynen, K.; Kiessling, F.; O’Reilly, M.; Pinton, G.F.; Schmitz, G.; Tang, M.-X.; et al. Super-resolution Ultrasound Imaging. Ultrasound Med. Biol. 2020, 46, 865–891. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Biocompatible Driving Mode | Micromotor Design | Application | Ref. | |
|---|---|---|---|---|
| Inorganic chemical-based energy | ||||
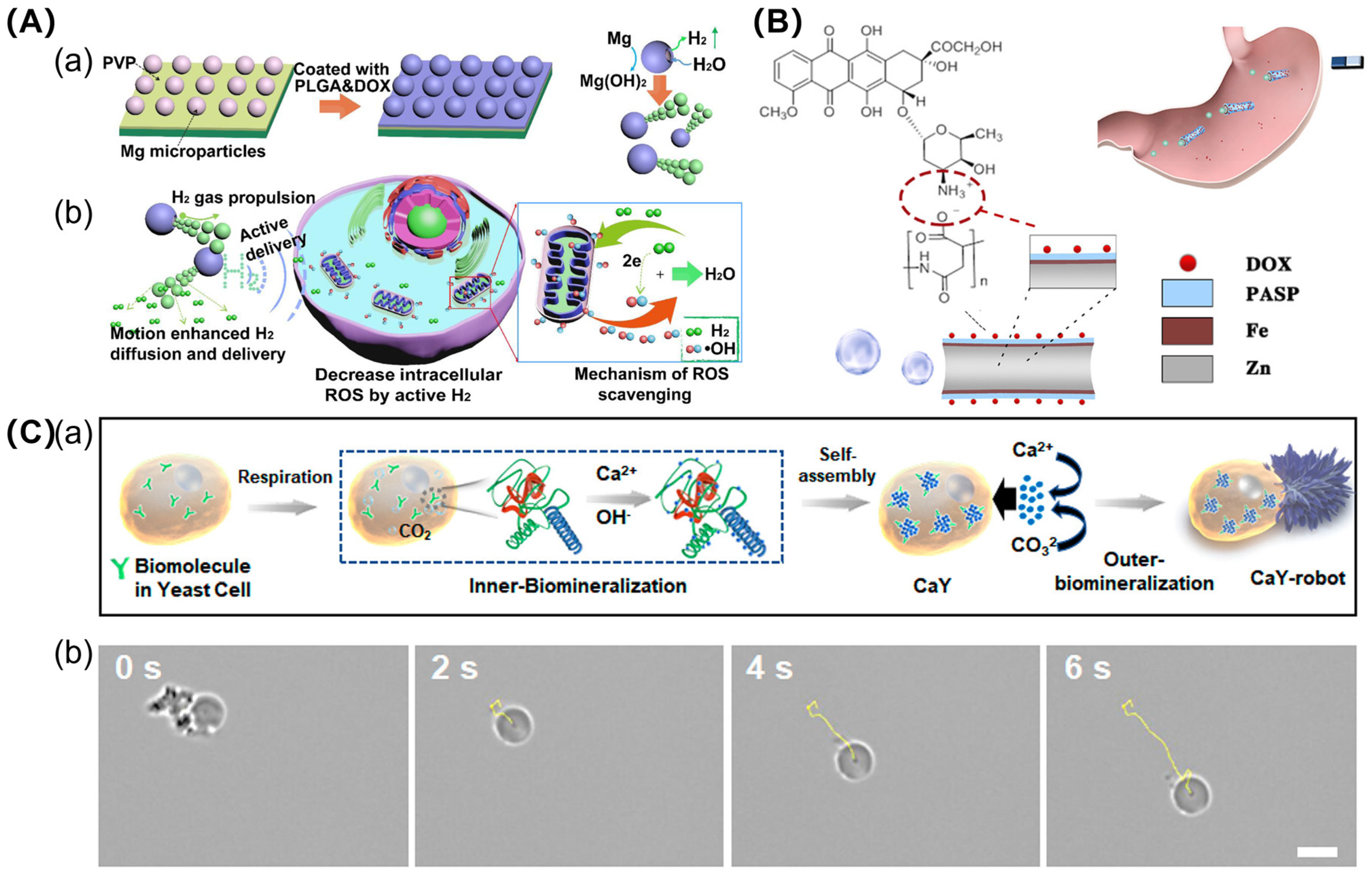
| Mg | Mg microparticles coated with PLGA and DOX |  | Inhibit tumor growth/deliver H2 (produced by Mg) and chemotherapeutic drug (DOX) | [43] |
| Mg | Mg particle surface immobilized with Fe3O4/polydopamine/anti-EpCAM |  | Capture and detect CTCs | [7] |
| Zn | DOX-loaded poly(aspartic acid)/Fe-Zn microrocket |  | Targeted drug delivery | [44] |
| CaCO3 | Yeast-based Cur@CaY-robot with inner CaCO3 for encapsulating curcumin, outside CaCO3 for propulsion |  | Improve drug agent accumulation, release Ca2+ for synergistic repair of gastric motility in mice with gastritis | [45] |
| Bio-hybrid | ||||
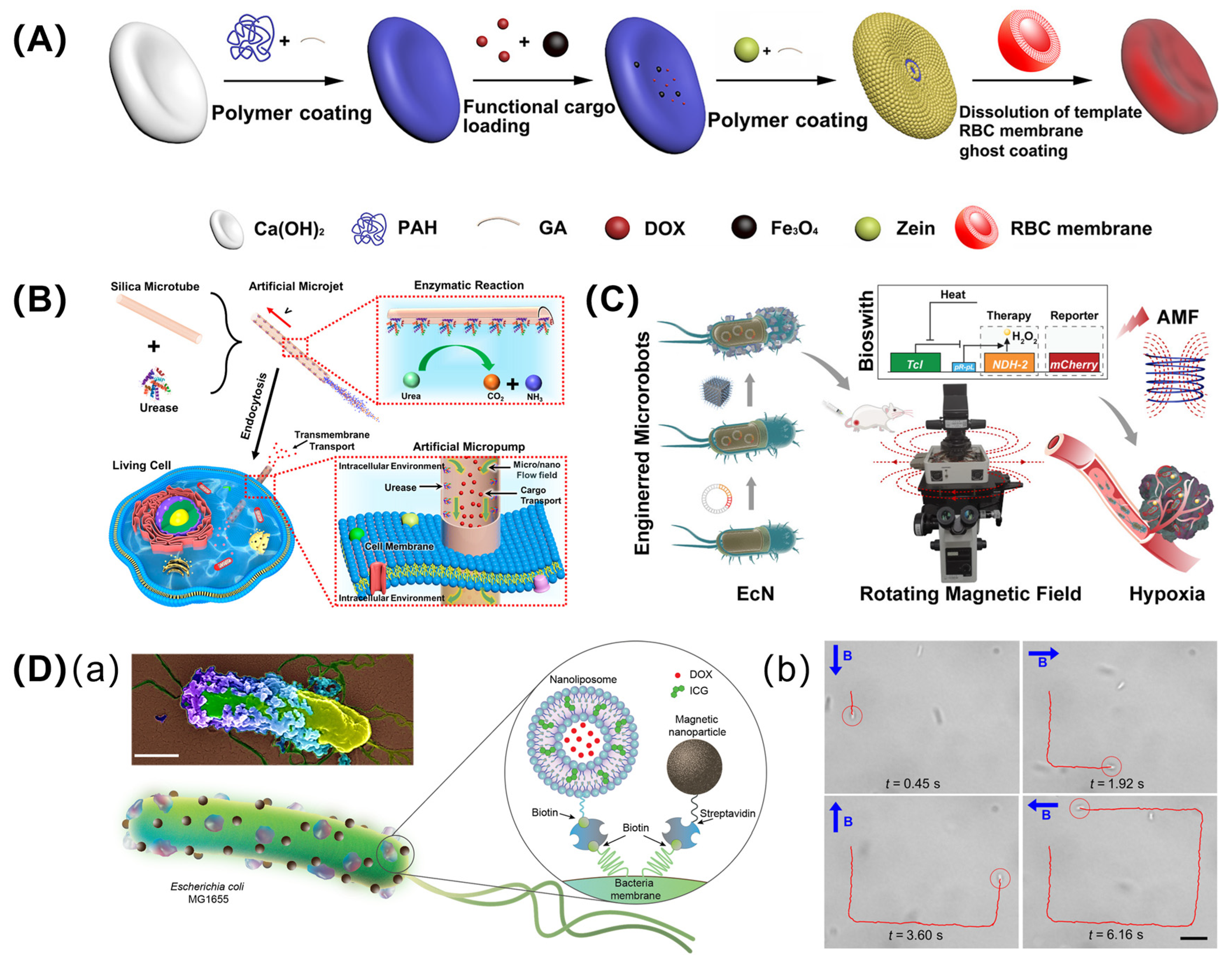
| Enzyme/ urease | Urease immobilized asymmetrically onto surface of platelet cells |  | Targeted anticancer drug (DOX) delivery in vitro | [57] |
| Enzyme/ catalase | Catalase modified on inner surface of microtube |  | Decrease motion speed for DNA sensing | [58] |
| Sperm | Magnetic microcap/sperm loaded with anticancer drug |  | Patient-specific 3D ovarian cancer treatment, drug loading, and delivery | [137] |
| Magnetotactic bacteria | Photosensitizer chlorin e6 (Ce6) incorporated into M. magneticum strain AMB-1 |  AMB-1/Ce6 | Targeted tumor therapy | [138] |
| Magnetic field | ||||
| Rotating magnetic field | Magnetic helical hydrogel (PVA/MA/Fe3O4) |  | Tumor DNA detection | [139] |
| Rotating magnetic field | Magnetic photonic-crystal microrobots (pH-responsive hydrogel microspheres encapsulated with Fe3O4 NPs) |  | pH mapping of microenvironment, drug delivery to specific tumor site, visual pH detection, DOX loading, and pH response to drug release | [140] |
| Rotating magnetic field | Silica-coated magnetic rod with Ag NPs grown on surface |  | Enhance sensing sensitivity of surface-enhanced Raman scattering (SERS) | [8] |
| Gradient magnetic field | Bacteria loaded with magnetic NPs and nanoliposomes |  | Liposomal drug delivery (DOX) and NIR response release | [63] |
| Ultrasound waves | ||||
| Standing acoustic waves | Graphene oxide-coated gold nanowire motors functionalized with fluorescein-labeled DNA aptamer |  | Sense AlB1 in breast cancer cells by fluorescence OFF-ON strategy | [141] |
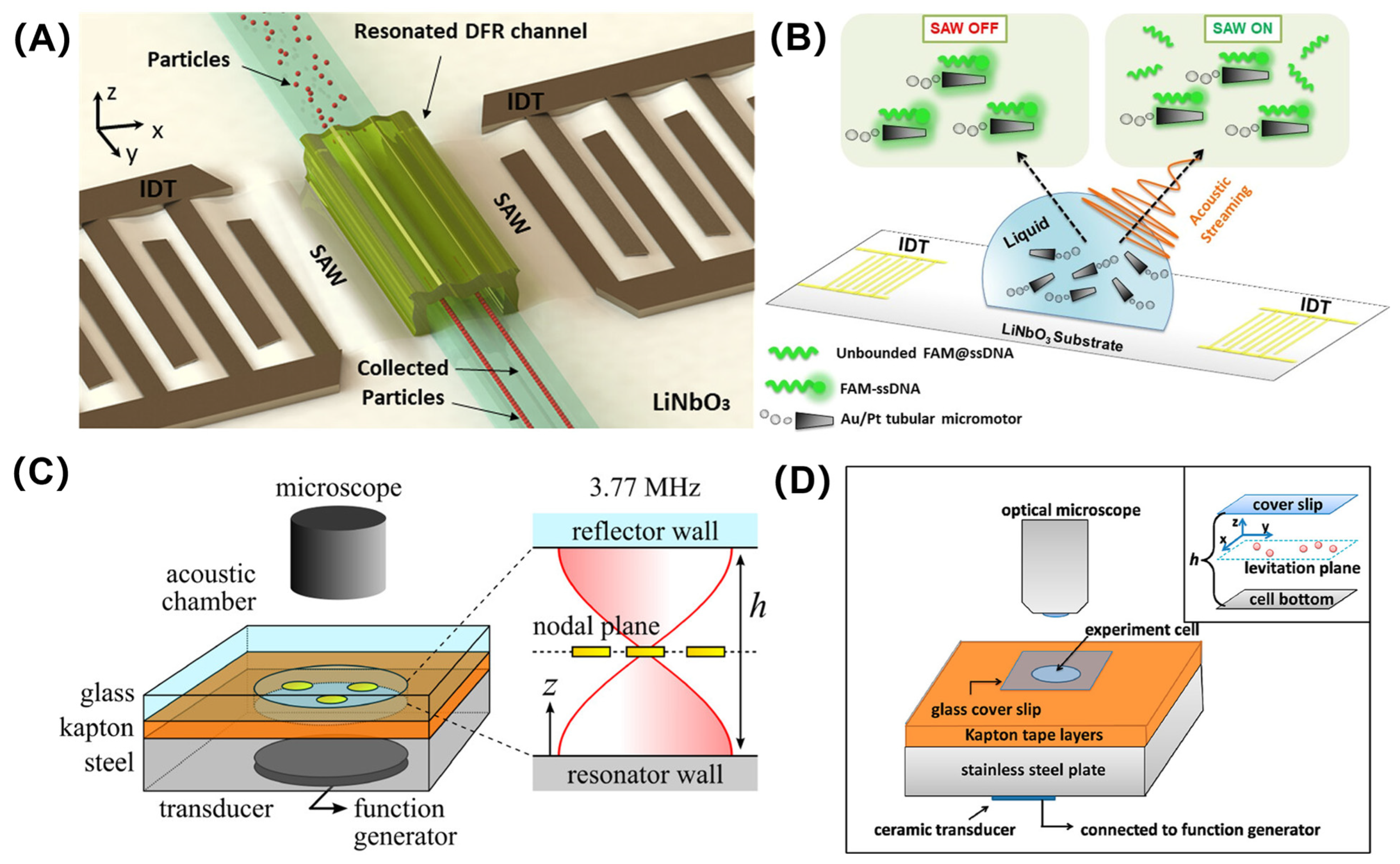
| Surface acoustic waves (SAWs) | Bimetallic Au/Pt tubular micromotor |  | Fluorescence detection of miRNA-21 | [71] |
| Light irradiation | ||||
| Optical tweezers | Upconversion fluorescence micromotor (lanthanide doped microrods) |  | Determine abnormal temperature of cells, deliver DOX-loaded mesoporous silica to vicinity of cancer cells | [142] |
| NIR (808 nm) | Au/Cu micromotor swarm |  | Synergistic photothermal strategy to eradicate tumors | [143] |
| Dual-propelled micromotor | ||||
| Magnetic/ electric | Janus microsphere structure formed by coating fluorescent polystyrene sphere with Cr, Ni, and Au |  | Identify apoptotic cells based on dielectrophoretic difference and use for cargo transport | [97] |
| Light/gas | DOX-loaded CaCO3/Au Janus micromotor |  | Overcome sequential biological barriers during tumor-targeted drug delivery | [144] |
| Microswarm | ||||
| Light | Microswarm actuation in a water droplet surrounded by silicone oil (cold Marangoni flow) |  | Cold Marangoni flow (avoiding heat damage) for microswarm manipulation and targeted gene delivery | [131] |
| Ultrasound/ magnetic | Magnetic field for forming microswarm and ultrasound for guidance |  | Acousto-magnetic microswarm to propel against flow | [132] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zheng, J.; Huang, R.; Lin, Z.; Chen, S.; Yuan, K. Nano/Micromotors for Cancer Diagnosis and Therapy: Innovative Designs to Improve Biocompatibility. Pharmaceutics 2024, 16, 44. https://doi.org/10.3390/pharmaceutics16010044
Zheng J, Huang R, Lin Z, Chen S, Yuan K. Nano/Micromotors for Cancer Diagnosis and Therapy: Innovative Designs to Improve Biocompatibility. Pharmaceutics. 2024; 16(1):44. https://doi.org/10.3390/pharmaceutics16010044
Chicago/Turabian StyleZheng, Jiahuan, Rui Huang, Zhexuan Lin, Shaoqi Chen, and Kaisong Yuan. 2024. "Nano/Micromotors for Cancer Diagnosis and Therapy: Innovative Designs to Improve Biocompatibility" Pharmaceutics 16, no. 1: 44. https://doi.org/10.3390/pharmaceutics16010044