
Acoustically Driven Cell-Based Microrobots for Targeted Tumor Therapy

 , , , ,
, , , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Preparation of SPIONs
2.2. Cell Culture
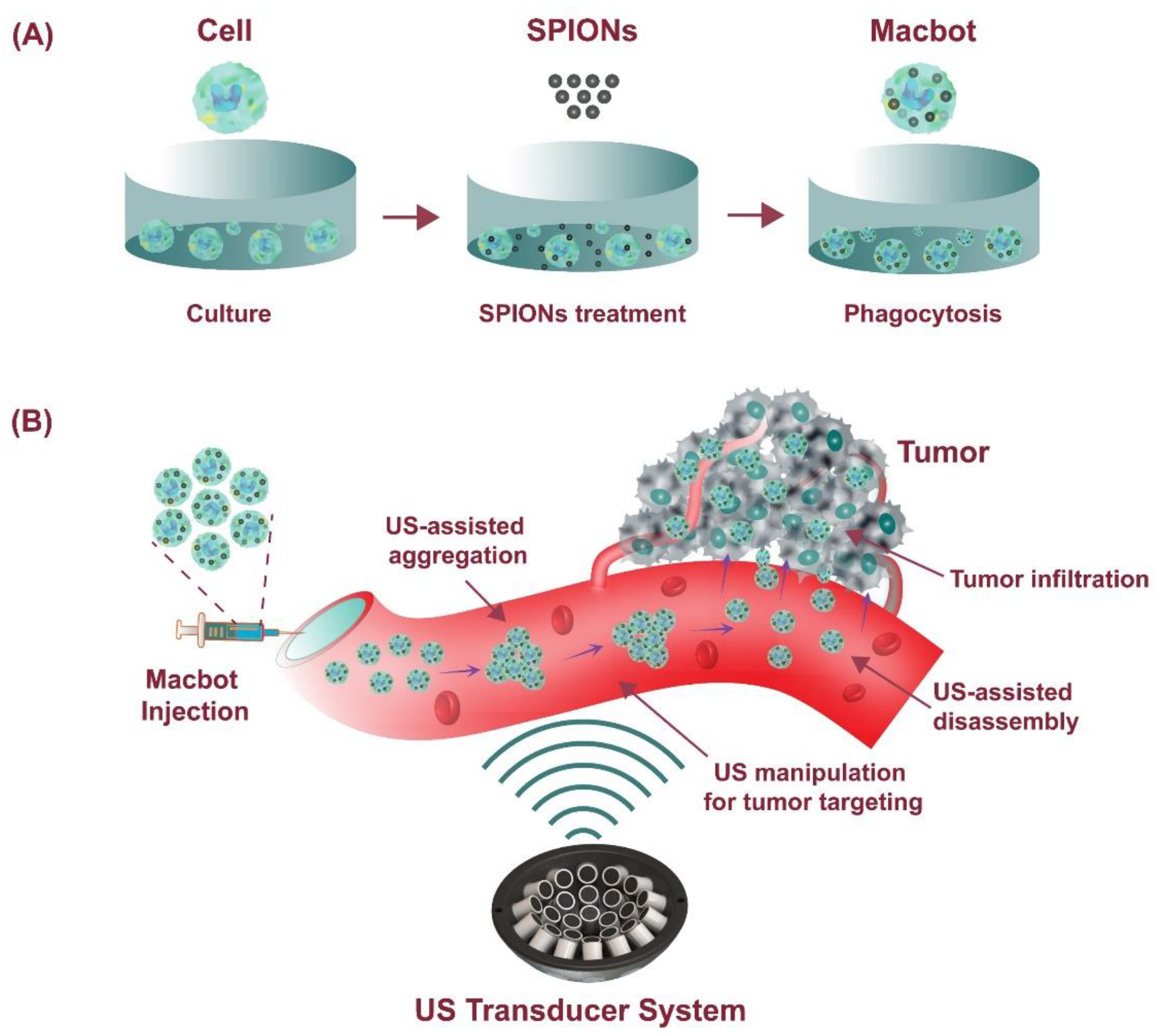
2.3. Preparation of Macbots
2.4. Acoustically Driven Macbots
2.5. Targeting the Macbots to 3D Tumor Spheroids
3. Results and Discussion
3.1. Preparation of SPIONs
3.2. Preparation of Macbots
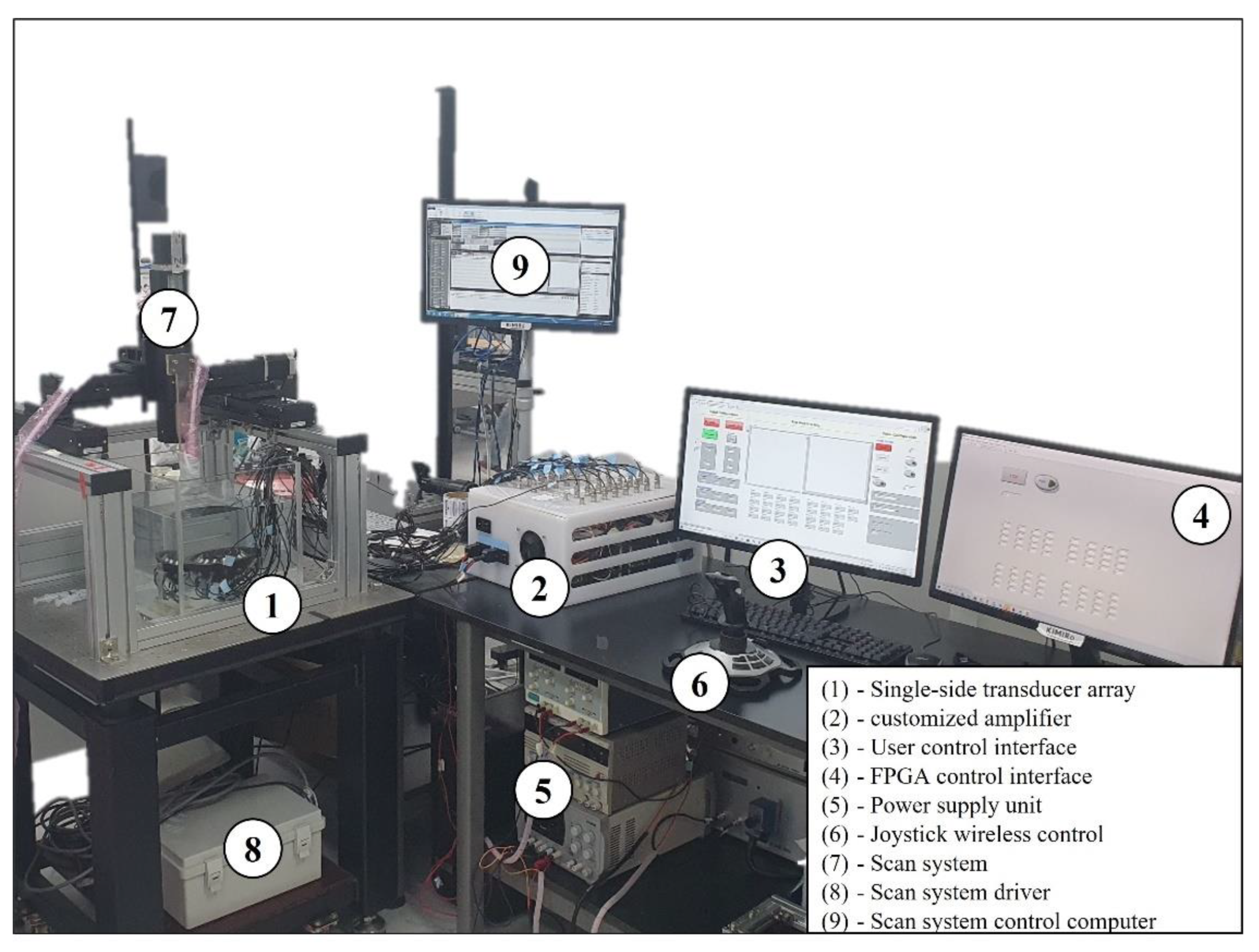
3.3. Manipulation of Macbots Using the Acoustic Actuator System
3.4. Evaluation of Tumor Targeting of Macbots
4. Conclusions and Future Work
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Bunea, A.A.-I.; Martella, D.; Nocentini, S.; Parmeggiani, C.; Taboryski, R.; Wiersma, D.S. Light-Powered Microrobots: Challenges and Opportunities for Hard and Soft Responsive Microswimmers. Adv. Intell. Syst. 2021, 3, 2000256. [Google Scholar] [CrossRef]
- Nguyen, V.D.; Han, J.W.; Choi, Y.J.; Cho, S.; Zheng, S.; Ko, S.Y.; Park, J.O.; Park, S. Active Tumor-Therapeutic Liposomal Bacteriobot Combining a Drug (Paclitaxel)-Encapsulated Liposome with Targeting Bacteria (Salmonella typhimurium). Sens. Actuators B Chem. 2016, 224, 217–224. [Google Scholar] [CrossRef]
- Tang, T.; Hosokawa, Y.; Hayakawa, T.; Tanaka, Y.; Li, W.; Li, M.; Yalikun, Y. Rotation of Biological Cells: Fundamentals and Applications. Engineering 2022, 10, 110–126. [Google Scholar] [CrossRef]
- Lu, X.; Zhao, K.; Liu, W.; Yang, D.; Shen, H.; Peng, H.; Guo, X.; Li, J.; Wang, J. A Human Microrobot Interface Based on Acoustic Manipulation. ACS Nano 2019, 13, 11443–11452. [Google Scholar] [CrossRef] [PubMed]
- Van Nguyen, D.; Le, V.H.; Kim, C.S.; Han, J.; Park, J.O.; Choi, E. A novel macrophage-based microrobot bearing multiple smart nanotherapeutics for targeting and drug delivery to solid tumors. In Proceedings of the 7th IEEE International Conference on Biomedical Robotics and Biomechatronics, Enschede, The Netherlands, 26–29 August 2018; pp. 55–60. [Google Scholar] [CrossRef]
- Du Nguyen, V.; Le, V.H.; Zheng, S.; Han, J.; Park, J.O. Preparation of Tumor Targeting Cell-Based Microrobots Carrying NIR Light Sensitive Therapeutics Manipulated by Electromagnetic Actuating System and Chemotaxis. J. Micro-Bio Robot. 2018, 14, 69–77. [Google Scholar] [CrossRef]
- Cao, H.X.; Jung, D.; Lee, H.S.; Go, G.; Nan, M.; Choi, E.; Kim, C.S.; Park, J.O.; Kang, B. Micromotor Manipulation Using Ultrasonic Active Traveling Waves. Micromachines 2021, 12, 192. [Google Scholar] [CrossRef]
- Song, H.W.; Lee, H.S.; Kim, S.J.; Kim, H.Y.; Choi, Y.H.; Kang, B.; Kim, C.S.; Park, J.O.; Choi, E. Sonazoid-Conjugated Natural Killer Cells for Tumor Therapy and Real-Time Visualization by Ultrasound Imaging. Pharmaceutics 2021, 13, 1689. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.-Z.; Jang, B.; Ahmed, D.; Hu, C.; de Marco, C.; Hoop, M.; Mushtaq, F.; Nelson, B.J.; Pané, S.; Chen, X.; et al. Small-Scale Machines Driven by External Power Sources. Adv. Mater. 2018, 30, 1705061. [Google Scholar] [CrossRef]
- Kim, Y.; Yuk, H.; Zhao, R.; Chester, S.A.; Zhao, X. Printing Ferromagnetic Domains for Untethered Fast-Transforming Soft Materials. Nature 2018, 558, 274–279. [Google Scholar] [CrossRef]
- Sitti, M.; Wiersma, D.S.; Sitti, M.; Wiersma, D.S. Pros and Cons: Magnetic versus Optical Microrobots. Adv. Mater. 2020, 32, 1906766. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Kagan, D.; Jack Hu, C.M.; Campuzano, S.; Lobo-Castañon, M.J.; Lim, N.; Kang, D.Y.; Zimmerman, M.; Zhang, L.; Wang, J. Micromachine-Enabled Capture and Isolation of Cancer Cells in Complex Media. Angew. Chem. 2011, 50, 4161–4164. [Google Scholar] [CrossRef]
- Lin, X.; Wu, Z.; Wu, Y.; Xuan, M.; He, Q. Self-Propelled Micro-/Nanomotors Based on Controlled Assembled Architectures. Adv. Mater. 2016, 28, 1060–1072. [Google Scholar] [CrossRef]
- Xu, D.; Wang, Y.; Liang, C.; You, Y.; Sanchez, S.; Ma, X.; Xu, D.; Wang, Y.; Liang, C.; You, Y.; et al. Self-Propelled Micro/Nanomotors for On-Demand Biomedical Cargo Transportation. Small 2020, 16, 1902464. [Google Scholar] [CrossRef]
- Karshalev, E.; Esteban-Fernández de Ávila, B.; Beltrán-Gastélum, M.; Angsantikul, P.; Tang, S.; Mundaca-Uribe, R.; Zhang, F.; Zhao, J.; Zhang, L.; Wang, J. Micromotor Pills as a Dynamic Oral Delivery Platform. ACS Nano 2018, 12, 8397–8405. [Google Scholar] [CrossRef]
- Ricotti, L.; Trimmer, B.; Feinberg, A.W.; Raman, R.; Parker, K.K.; Bashir, R.; Sitti, M.; Martel, S.; Dario, P.; Menciassi, A. Biohybrid Actuators for Robotics: A Review of Devices Actuated by Living Cells. Sci. Robot. 2017, 2, eaaq0495. [Google Scholar] [CrossRef] [Green Version]
- Bente, K.; Codutti, A.; Bachmann, F.; Faivre, D.; Bente, K.; Codutti, A.; Bachmann, F.; Faivre, D. Biohybrid and Bioinspired Magnetic Microswimmers. Small 2018, 14, 1704374. [Google Scholar] [CrossRef]
- Alapan, Y.; Yasa, O.; Schauer, O.; Giltinan, J.; Tabak, A.F.; Sourjik, V.; Sitti, M. Soft Erythrocyte-Based Bacterial Microswimmers for Cargo Delivery. Sci. Robot. 2018, 3, eaar4423. [Google Scholar] [CrossRef] [Green Version]
- Ashkin, A.; Dziedzic, J.M. Optical Trapping and Manipulation of Viruses and Bacteria. Science 1987, 235, 1517–1520. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, K.K. Optical Tweezers for Single Cells. J. R. Soc. Interface 2008, 5, 671–690. [Google Scholar] [CrossRef]
- Ashkin, A.; Dziedzic, J.M.; Bjorkholm, J.E.; Chu, S. Observation of a Single-Beam Gradient Force Optical Trap for Dielectric Particles. Opt. Lett. 1986, 11, 288–290. [Google Scholar] [CrossRef] [Green Version]
- Bausch, A.R.; Möller, W.; Sackmann, E. Measurement of Local Viscoelasticity and Forces in Living Cells by Magnetic Tweezers. Biophys J. 1999, 76, 573–579. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Offenhäusser, A.; Krause, H.J. Magnetic Tweezers with High Permeability Electromagnets for Fast Actuation of Magnetic Beads. Rev. Sci. Instrum. 2015, 86, 044701. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ebrahimian, H.; Giesguth, M.; Dietz, K.J.; Reiss, G.; Herth, S. Magnetic Tweezers for Manipulation of Magnetic Particles in Single Cells. Appl. Phys. Lett. 2014, 104, 063701. [Google Scholar] [CrossRef]
- Nguyen, K.T.; Hoang, M.C.; Go, G.; Kang, B.; Choi, E.; Park, J.O.; Kim, C.S. Regularization-Based Independent Control of an External Electromagnetic Actuator to Avoid Singularity in the Spatial Manipulation of a Microrobot. Control Eng. Pract. 2020, 97, 104340. [Google Scholar] [CrossRef]
- Kummer, M.P.; Abbott, J.J.; Kratochvil, B.E.; Borer, R.; Sengul, A.; Nelson, B.J. Octomag: An Electromagnetic System for 5-DOF Wireless Micromanipulation. IEEE Trans. Robot. 2010, 26, 1006–1017. [Google Scholar] [CrossRef]
- Go, G.; Nguyen, V.D.; Jin, Z.; Park, J.O.; Park, S. A Thermo-Electromagnetically Actuated Microrobot for the Targeted Transport of Therapeutic Agents. Int. J. Control Autom. Syst. 2018, 16, 1341–1354. [Google Scholar] [CrossRef]
- Yalikun, Y.; Kanda, Y.; Morishima, K. A Method of Three-Dimensional Micro-Rotational Flow Generation for Biological Applications. Micromachines 2016, 7, 140. [Google Scholar] [CrossRef]
- Shetty, R.M.; Myers, J.R.; Sreenivasulu, M.; Teller, W.; Vela, J.; Houkal, J.; Chao, S.H.; Johnson, R.H.; Kelbauskas, L.; Wang, H.; et al. Characterization and Comparison of Three Microfabrication Methods to Generate Out-of-Plane Microvortices for Single Cell Rotation and 3D Imaging. J. Micromech. Microeng. 2016, 27, 015004. [Google Scholar] [CrossRef]
- Yalikun, Y.; Aishan, Y.; Mosha, A.; Sumiyama, K.; Tanaka, Y. Oocyte All-Surfaces’ Imaging Method Using Micro-Scale Rotational Flow. Micro Nano Lett. 2018, 13, 306–311. [Google Scholar] [CrossRef]
- Soffe, R.; Tang, S.Y.; Baratchi, S.; Nahavandi, S.; Nasabi, M.; Cooper, J.M.; Mitchell, A.; Khoshmanesh, K. Controlled Rotation and Vibration of Patterned Cell Clusters Using Dielectrophoresis. Anal. Chem. 2015, 87, 2389–2395. [Google Scholar] [CrossRef]
- Probst, R.; Shapiro, B. Three-Dimensional Electrokinetic Tweezing: Device Design, Modeling, and Control Algorithms. J. Micromech. Microeng. 2011, 21, 027004. [Google Scholar] [CrossRef] [Green Version]
- Cohen, A.E.; Moemer, W.E. Method for Trapping and Manipulating Nanoscale Objects in Solution. Appl. Phys. Lett. 2005, 86, 093109. [Google Scholar] [CrossRef] [Green Version]
- Marzo, A.; Seah, S.A.; Drinkwater, B.W.; Sahoo, D.R.; Long, B.; Subramanian, S. Holographic Acoustic Elements for Manipulation of Levitated Objects. Nat. Commun. 2015, 6, 8661. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ozcelik, A.; Rufo, J.; Guo, F.; Gu, Y.; Li, P.; Lata, J.; Huang, T.J. Acoustic Tweezers for the Life Sciences. Nat. Methods 2018, 15, 1021–1028. [Google Scholar] [CrossRef] [Green Version]
- Cao, H.X.; Jung, D.; Lee, H.-S.; Nguyen, V.D.; Choi, E.; Kang, B.; Park, J.-O.; Kim, C.-S. Holographic Acoustic Tweezers for 5-DoF Manipulation of Nanocarrier Clusters toward Targeted Drug Delivery. Pharmaceutics 2022, 14, 1490. [Google Scholar] [CrossRef]
- Ren, L.; Nama, N.; McNeill, J.M.; Soto, F.; Yan, Z.; Liu, W.; Wang, W.; Wang, J.; Mallouk, T.E. 3D Steerable, Acoustically Powered Microswimmers for Single-Particle Manipulation. Sci. Adv. 2019, 5, eaax3084. [Google Scholar] [CrossRef] [Green Version]
- Baudoin, M.; Thomas, J.-L.; Al Sahely, R.; Gerbedoen, J.-C.; Gong, Z.; Sivery, A.; Matar, O.; Smagin, N.; Favreau, P.; Vlandas, A. Cell Selective Manipulation with Single Beam Acoustical Tweezers. Nat. Commun. 2020, 11, 4244. [Google Scholar] [CrossRef]
- Zhao, Q.; Wang, H.W.; Yu, P.P.; Zhang, S.H.; Zhou, J.H.; Li, Y.M.; Gong, L. Trapping and Manipulation of Single Cells in Crowded Environments. Front. Bioeng. Biotechnol. 2020, 8, 422. [Google Scholar] [CrossRef]
- Xu, T.; Xu, L.P.; Zhang, X. Ultrasound Propulsion of Micro-/Nanomotors. Appl. Mater. Today 2017, 9, 493–503. [Google Scholar] [CrossRef]
- Marzo, A.; Barnes, A.; Drinkwater, B.W. TinyLev: A Multi-Emitter Single-Axis Acoustic Levitator. Rev. Sci. Instrum. 2017, 88, 085105. [Google Scholar] [CrossRef] [Green Version]
- Ding, X.; Li, P.; Lin, S.-C.S.; Stratton, Z.S.; Nama, N.; Guo, F.; Slotcavage, D.; Mao, X.; Shi, J.; Costanzo, F.; et al. Surface Acoustic Wave Microfluidics. Lab Chip 2013, 13, 3626–3649. [Google Scholar] [CrossRef] [PubMed]
- Kvåle Løvmo, M.; Pressl, B.; Thalhammer, G.; Ritsch-Marte, M.; Løvmo, M.K.; Pressl, B.; Thalhammer, G.; Ritsch-Marte, M. Controlled Orientation and Sustained Rotation of Biological Samples in a Sono-Optical Microfluidic Device. Lab Chip 2021, 21, 1563–1578. [Google Scholar] [CrossRef] [PubMed]
- Tran, S.B.Q.; Marmottant, P.; Thibault, P. Fast Acoustic Tweezers for the Two-Dimensional Manipulation of Individual Particles in Microfluidic Channels. Appl. Phys. Lett. 2012, 101, 114103. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Li, S.; Mair, L.; Ahmed, S.; Jun Huang, T.; Mallouk, T.E. Acoustic Propulsion of Nanorod Motors Inside Living Cells. Angew. Chem. Int. Ed. 2014, 53, 3201–3204. [Google Scholar] [CrossRef]
- Kaynak, M.; Dirix, P.; Sakar, M.S. Addressable Acoustic Actuation of 3D Printed Soft Robotic Microsystems. Adv. Sci. 2020, 7, 2001120. [Google Scholar] [CrossRef]
- Ahmed, D.; Lu, M.; Nourhani, A.; Lammert, P.E.; Stratton, Z.; Muddana, H.S.; Crespi, V.H.; Huang, T.J. Selectively Manipulable Acoustic-Powered Microswimmers. Sci. Rep. 2015, 5, 9744. [Google Scholar] [CrossRef] [Green Version]
- Aghakhani, A.; Yasa, O.; Wrede, P.; Sitti, M. Acoustically Powered Surface-Slipping Mobile Microrobots. Proc. Natl. Acad. Sci. USA 2020, 117, 3469–3477. [Google Scholar] [CrossRef] [Green Version]
- Wilhelm, S.; Tavares, A.J.; Dai, Q.; Ohta, S.; Audet, J.; Dvorak, H.F.; Chan, W.C.W. Analysis of Nanoparticle Delivery to Tumours. Nat. Rev. Mater. 2016, 1, 16014. [Google Scholar] [CrossRef]
- Felfoul, O.; Mohammadi, M.; Taherkhani, S.; De Lanauze, D.; Zhong Xu, Y.; Loghin, D.; Essa, S.; Jancik, S.; Houle, D.; Lafleur, M.; et al. Magneto-Aerotactic Bacteria Deliver Drug-Containing Nanoliposomes to Tumour Hypoxic Regions. Nat. Nanotechnol. 2016, 11, 941–947. [Google Scholar] [CrossRef]
- Akin, D.; Sturgis, J.; Ragheb, K.; Sherman, D.; Burkholder, K.; Robinson, J.P.; Bhunia, A.K.; Mohammed, S.; Bashir, R. Bacteria-Mediated Delivery of Nanoparticles and Cargo into Cells. Nat. Nanotechnol. 2007, 2, 441–449. [Google Scholar] [CrossRef] [Green Version]
- Huang, W.C.; Lu, I.L.; Chiang, W.H.; Lin, Y.W.; Tsai, Y.C.; Chen, H.H.; Chang, C.W.; Chiang, C.S.; Chiu, H.C. Tumortropic Adipose-Derived Stem Cells Carrying Smart Nanotherapeutics for Targeted Delivery and Dual-Modality Therapy of Orthotopic Glioblastoma. J. Control. Release 2017, 254, 119–130. [Google Scholar] [CrossRef]
- Choi, M.R.; Stanton-Maxey, K.J.; Stanley, J.K.; Levin, C.S.; Bardhan, R.; Akin, D.; Badve, S.; Sturgis, J.; Robinson, J.P.; Bashir, R.; et al. A Cellular Trojan Horse for Delivery of Therapeutic Nanoparticles into Tumors. Nano Lett. 2007, 7, 3759–3765. [Google Scholar] [CrossRef] [PubMed]
- Kelly, P.M.A.; Davison, R.S.; Bliss, E.; McGee, J.O.D. Macrophages in Human Breast Disease: A Quantitative Immunohistochemical Study. Br. J. Cancer 1988, 57, 174–177. [Google Scholar] [CrossRef] [PubMed]
- Rǎcuciu, M.; Creangǎ, D.E.; Airinei, A. Citric-Acid-Coated Magnetite Nanoparticles for Biological Applications. Eur. Phys. J. 2006, 21, 117–121. [Google Scholar] [CrossRef]
- Zheng, S.; Nguyen, V.D.; Song, S.Y.; Han, J.; Park, J.O. Combined Photothermal-Chemotherapy of Breast Cancer by near Infrared Light Responsive Hyaluronic Acid-Decorated Nanostructured Lipid Carriers. Nanotechnology 2017, 28, 435102. [Google Scholar] [CrossRef]
- Du Nguyen, V.; Han, J.; Go, G.; Zhen, J.; Zheng, S.; Le, V.H.; Park, J.O.; Park, S. Feasibility Study of Dual-Targeting Paclitaxel-Loaded Magnetic Liposomes Using Electromagnetic Actuation and Macrophages. Sens. Actuators B Chem. 2017, 240, 1226–1236. [Google Scholar] [CrossRef]
- Choi, I.S.; Ko, S.H.; Kim, H.M.; Chun, H.H.; Lee, K.H.; Yang, J.E.; Jeong, S.; Park, H.W. Shelf-Life Extension of Freeze-Dried Lactobacillus Brevis WiKim0069 Using Supercooling Pretreatment. LWT 2019, 112, 108230. [Google Scholar] [CrossRef]
- Silva, G.T.; Baggio, A.L. Designing Single-Beam Multitrapping Acoustical Tweezers. Ultrasonics 2015, 56, 449–455. [Google Scholar] [CrossRef] [Green Version]
- Guo, F.; Mao, Z.; Chen, Y.; Xie, Z.; Lata, J.P.; Li, P.; Ren, L.; Liu, J.; Yang, J.; Dao, M.; et al. Three-Dimensional Manipulation of Single Cells Using Surface Acoustic Waves. Proc. Natl. Acad. Sci. USA 2016, 113, 1522–1527. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.S.; Go, G.; Choi, E.; Kang, B.; Park, J.O.; Kim, C.S. Medical Microrobot—Wireless Manipulation of a Drug Delivery Carrier through an External Ultrasonic Actuation: Preliminary Results. Int. J. Control Autom. Syst. 2020, 18, 175–185. [Google Scholar] [CrossRef]
- Bruus, H. Acoustofluidics 7: The Acoustic Radiation Force on Small Particles. Lab Chip 2012, 12, 1014–1021. [Google Scholar] [CrossRef] [PubMed]
- Park, D.; Park, S.J.; Cho, S.; Lee, Y.; Lee, Y.K.; Min, J.J.; Park, B.J.; Ko, S.Y.; Park, J.O.; Park, S. Motility Analysis of Bacteria-Based Microrobot (Bacteriobot) Using Chemical Gradient Microchamber. Biotechnol. Bioeng. 2014, 111, 134–143. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actuation Power Platform | Single Object Size Range | Input Power | Control Force 1 | Additional System Requirements |
|---|---|---|---|---|
| Acoustic field [7,34,35,36] | 0.1–1000 (μm) | 10−2–10 (W/cm2) | Axial acoustic force (μN) | Low acoustic impedance media, matching layer |
| Optical field [19,20,21,35] | 0.1–100 (μm) | 106–107 (W/cm2) | Trapping force and torque (pN) | High numerical aperture lens, high-powered laser system. |
| Magnetic field [22,23,24,35] | 0.1–10 (μm) | 1–10 (Tesla) | Magnetic gradient field force (nN to μN) | Magnetic particles, high-current power source |
| Hydrodynamic field [28,29,30,35] | 0.1–1100 (μm) | N/A | Hydrodynamic effects (pN to μN) | Flow control method, specific platform |
| Electric field [31,32,33] | 0.001–1000 (μm) | 104–107 (V/m) | Dielectrophoresis force (pN to μN) | Low-conductivity media, AC electric signal |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, H.X.; Nguyen, V.D.; Jung, D.; Choi, E.; Kim, C.-S.; Park, J.-O.; Kang, B. Acoustically Driven Cell-Based Microrobots for Targeted Tumor Therapy. Pharmaceutics 2022, 14, 2143. https://doi.org/10.3390/pharmaceutics14102143
Cao HX, Nguyen VD, Jung D, Choi E, Kim C-S, Park J-O, Kang B. Acoustically Driven Cell-Based Microrobots for Targeted Tumor Therapy. Pharmaceutics. 2022; 14(10):2143. https://doi.org/10.3390/pharmaceutics14102143
Chicago/Turabian StyleCao, Hiep Xuan, Van Du Nguyen, Daewon Jung, Eunpyo Choi, Chang-Sei Kim, Jong-Oh Park, and Byungjeon Kang. 2022. "Acoustically Driven Cell-Based Microrobots for Targeted Tumor Therapy" Pharmaceutics 14, no. 10: 2143. https://doi.org/10.3390/pharmaceutics14102143