

Forest Canopy Fuel Loads Mapping Using Unmanned Aerial Vehicle High-Resolution Red, Green, Blue and Multispectral Imagery
 , , , and
, , , and
Abstract
:1. Introduction
2. Materials and Methods
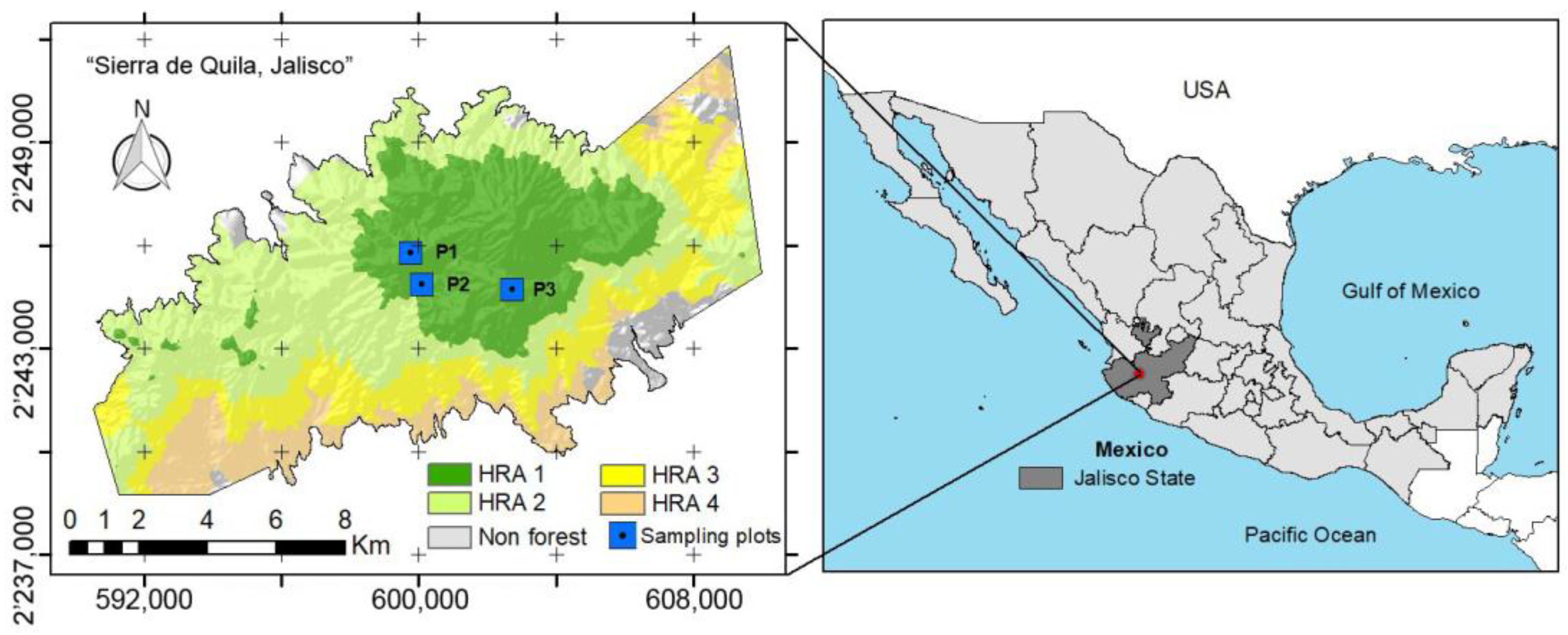
2.1. Study Area
2.2. Materials, Data and Methods
2.2.1. Field Data
2.2.2. Remote Sensing Data
2.2.3. Photogrammetric Point Clouds Generation
2.2.4. Point Clouds Segmentation
2.2.5. Multispectral Analysis
2.2.6. CFL Spatial Distribution
3. Results
3.1. Plots’ Forest Structure
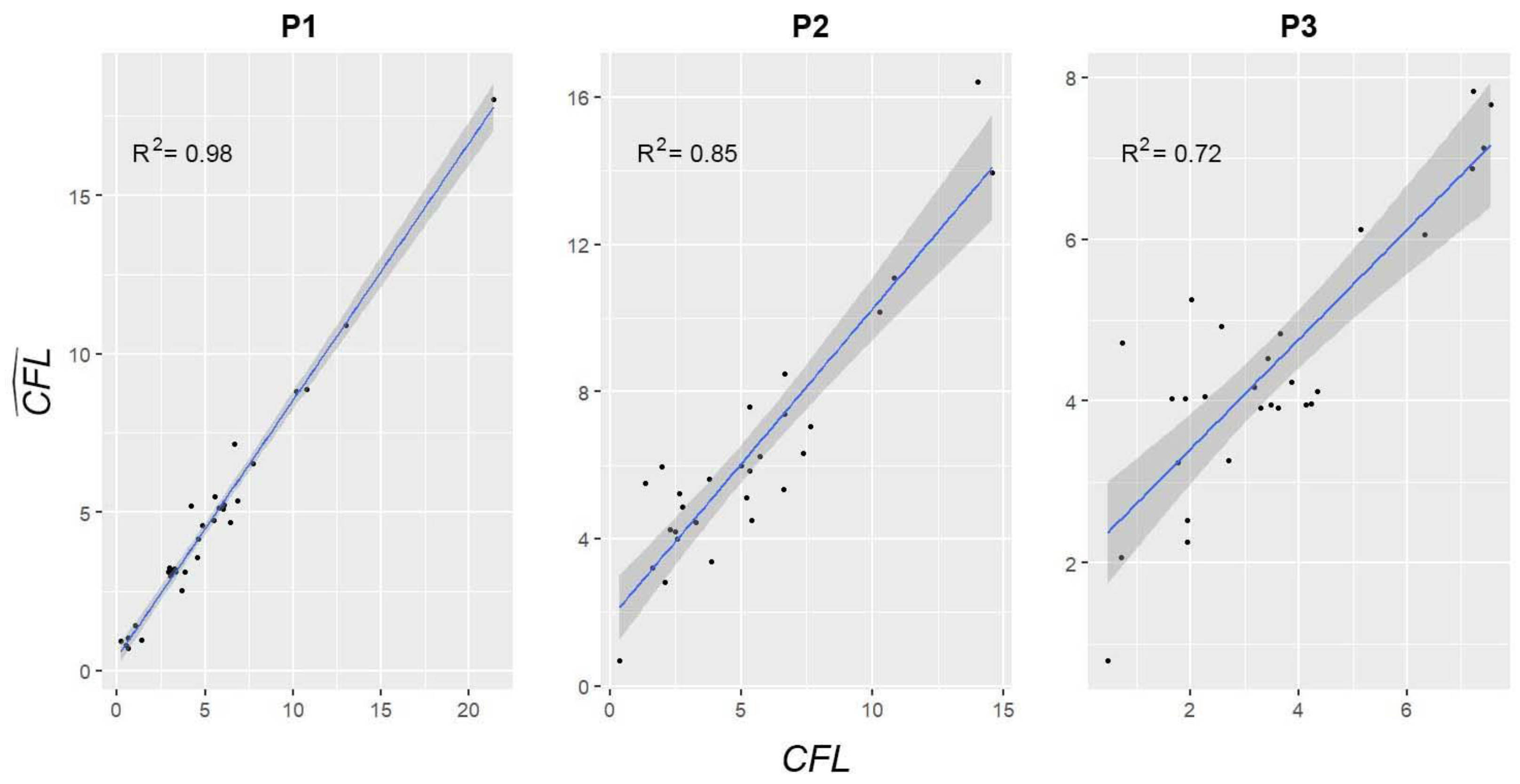
3.2. Remote Sensing Estimates
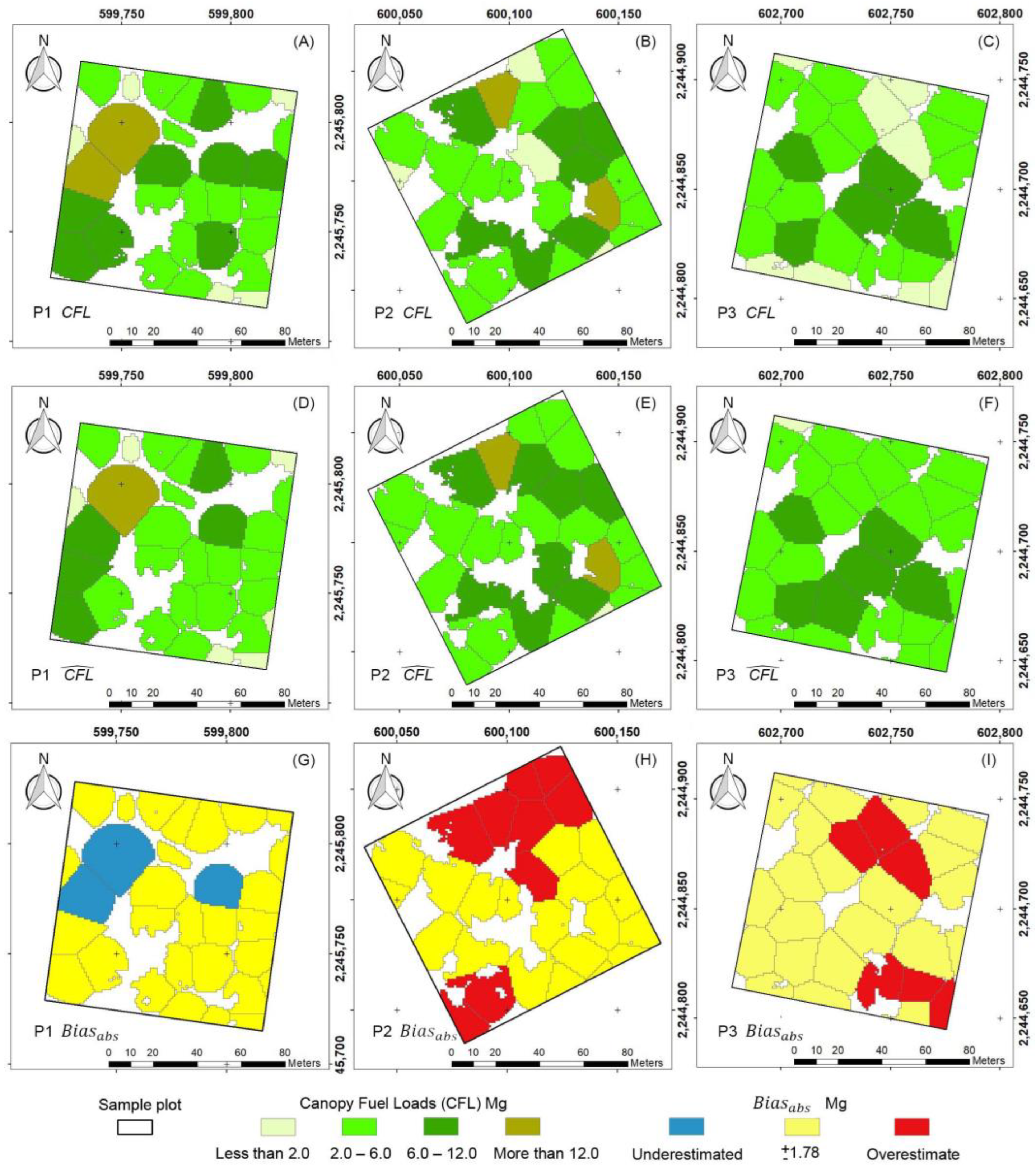
3.3. Spatial Distribution of CFLs
4. Discussion
4.1. Plots Forest Structure
4.2. Remote Sensing
4.3. Spatial Distribution of CFLs
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pyne, S.J.; Andrews, P.L.; Laven, R.D. Introduction to Wildland Fire, 2nd ed.; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Keane, R.E. Wildland Fuel Fundamentals and Applications; Springer International: New York, NY, USA, 2015. [Google Scholar]
- United States Department of Agriculture, Forest Service (USDA). Fuels Management. Available online: https://www.fs.usda.gov/ (accessed on 16 September 2023).
- Weise, D.R.; Cobian-Iñiguez, J.; Princevac, M. Surface to Crown Transition. In Encyclopedia of Wildfires and Wildland-Urban Interface (WUI) Fires; Springer International Publishing: Cham, Switzerland, 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Scott, J.H.; Reinhardt, E.D. Assessing Crown Fire Potential by Linking Models of Surface and Crown Fire Behavior; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Fort Collins, CO, USA, 2001. [CrossRef]
- Maesano, M.; Ottaviano, M.; Lidestav, G.; Lasserre, B.; Matteucci, G.; Scarascia Mugnozza, G.; Marchetti, M. Forest Certification Map of Europe. IForest 2018, 11, 526–533. [Google Scholar] [CrossRef]
- Dang, A.T.N.; Nandy, S.; Srinet, R.; Luong, N.V.; Ghosh, S.; Senthil Kumar, A. Forest Aboveground Biomass Estimation Using Machine Learning Regression Algorithm in Yok Don National Park, Vietnam. Ecol. Inf. 2019, 50, 24–32. [Google Scholar] [CrossRef]
- Skowronski, N.S.; Clark, K.L.; Duveneck, M.; Hom, J. Three-Dimensional Canopy Fuel Loading Predicted Using Upward and Downward Sensing LiDAR Systems. Remote Sens. Environ. 2011, 115, 703–714. [Google Scholar] [CrossRef]
- Mallinis, G.; Mitsopoulos, Ι.; Stournara, P.; Patias, P.; Dimitrakopoulos, A. Canopy Fuel Load Mapping of Mediterranean Pine Sites Based on Individual Tree-Crown Delineation. Remote Sens. 2013, 5, 6461–6480. [Google Scholar] [CrossRef]
- Stereńczak, K.; Mielcarek, M.; Wertz, B.; Bronisz, K.; Zajączkowski, G.; Jagodziński, A.M.; Ochał, W.; Skorupski, M. Factors Influencing the Accuracy of Ground-Based Tree-Height Measurements for Major European Tree Species. J. Environ. Manag. 2019, 231, 1284–1292. [Google Scholar] [CrossRef]
- Tadese, S.; Soromessa, T.; Bekele, T.; Bereta, A.; Hailemariam, F. Above Ground Biomass Estimation Methods and Challenges: A Review. J. Energy Technol. Policy 2019, 9, 1–14. [Google Scholar] [CrossRef]
- Prichard, S.J.; Andreu, A.G.; Ottmar, R.D.; Eberhardt, E. Fuel Characteristic Classification System (FCCS) Field Sampling and Fuelbed Development Guide; United States Department of Agriculture: Portland, OR, USA, 2019. [CrossRef]
- Chávez-Durán, Á.A.; Flores-Garnica, J.G.; Luna-Luna, M.; Centeno-Erguera, L.R.; Alarcón-Bustamante, M.P. Caracterización y Clasificación de Camas de Combustibles Prioritarias En México Para Planificar El Manejo Del Fuego. Informe Técnico Fondo Sectorial CONACyT-CONAFOR. Referencia: CONAFOR-2012-C01-175523; Sistema Nacional de Información y Gestión Forestal: Tepatitlán de Morelos, Mexico, 2014. Available online: http://www.cnf.gob.mx/IMASD (accessed on 16 August 2022).
- Ortíz-Mendoza, R.; Martínez-Torres, H.L.; Pérez-Salicrup, D.R.; Garduño-Mendoza, E.; Oceguera-Salazar, K.A. Caracterización y Clasificación de Combustibles Para Generar y Validar Modelos de Combustibles Forestales Para México. CONAFOR-CONACyT 2014-251694. Metodología y Guía de Campo Para La Medición de Cargas de Camas de Combustibles Forestales y Ambientes Del Fuego; CONAFOR: Morelia, Mexico, 2017. Available online: http://www.cnf.gob.mx/IMASD (accessed on 16 September 2023).
- Zolkos, S.G.; Goetz, S.J.; Dubayah, R. A Meta-Analysis of Terrestrial Aboveground Biomass Estimation Using Lidar Remote Sensing. Remote Sens. Environ. 2013, 128, 289–298. [Google Scholar] [CrossRef]
- Barrett, F.; McRoberts, R.E.; Tomppo, E.; Cienciala, E.; Waser, L.T. A Questionnaire-Based Review of the Operational Use of Remotely Sensed Data by National Forest Inventories. Remote Sens. Environ. 2016, 174, 279–289. [Google Scholar] [CrossRef]
- García, M.; Saatchi, S.; Casas, A.; Koltunov, A.; Ustin, S.; Ramirez, C.; Balzter, H. Extrapolating Forest Canopy Fuel Properties in the California Rim Fire by Combining Airborne LiDAR and Landsat OLI Data. Remote Sens. 2017, 9, 394. [Google Scholar] [CrossRef]
- García, M.; Danson, F.M.; Riaño, D.; Chuvieco, E.; Ramirez, F.A.; Bandugula, V. Terrestrial Laser Scanning to Estimate Plot-Level Forest Canopy Fuel Properties. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 636–645. [Google Scholar] [CrossRef]
- García, M.; Popescu, S.; Riaño, D.; Zhao, K.; Neuenschwander, A.; Agca, M.; Chuvieco, E. Characterization of Canopy Fuels Using ICESat/GLAS Data. Remote Sens. Environ. 2012, 123, 81–89. [Google Scholar] [CrossRef]
- Jiang, F.; Deng, M.; Tang, J.; Fu, L.; Sun, H. Integrating Spaceborne LiDAR and Sentinel-2 Images to Estimate Forest Aboveground Biomass in Northern China. Carbon. Balance Manag. 2022, 17, 12. [Google Scholar] [CrossRef]
- Moran, C.J.; Kane, V.R.; Seielstad, C.A. Mapping Forest Canopy Fuels in the Western United States with LiDAR–Landsat Covariance. Remote Sens. 2020, 12, 1000. [Google Scholar] [CrossRef]
- Bergamo, T.F.; de Lima, R.S.; Kull, T.; Ward, R.D.; Sepp, K.; Villoslada, M. From UAV to PlanetScope: Upscaling Fractional Cover of an Invasive Species Rosa Rugosa. J. Environ. Manag. 2023, 336, 117693. [Google Scholar] [CrossRef]
- Mao, P.; Ding, J.; Jiang, B.; Qin, L.; Qiu, G.Y. How Can UAV Bridge the Gap between Ground and Satellite Observations for Quantifying the Biomass of Desert Shrub Community? ISPRS J. Photogramm. Remote Sens. 2022, 192, 361–376. [Google Scholar] [CrossRef]
- Maesano, M.; Santopuoli, G.; Moresi, F.; Matteucci, G.; Lasserre, B.; Scarascia Mugnozza, G. Above Ground Biomass Estimation from UAV High Resolution RGB Images and LiDAR Data in a Pine Forest in Southern Italy. IForest 2022, 15, 451–457. [Google Scholar] [CrossRef]
- Riggi, E.; Avola, G.; Di Gennaro, S.F.; Cantini, C.; Muratore, F.; Tornambè, C.; Matese, A. UAV-Based 3D Models of Olive Tree Crown Volumes for above-Ground Biomass Estimation. Acta Hortic. 2021, 1314, 353–360. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A Review on Unmanned Aerial Vehicle Remote Sensing: Platforms, Sensors, Data Processing Methods, and Applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Duff, T.; Keane, R.; Penman, T.; Tolhurst, K. Revisiting Wildland Fire Fuel Quantification Methods: The Challenge of Understanding a Dynamic, Biotic Entity. Forests 2017, 8, 351. [Google Scholar] [CrossRef]
- Comisión Nacional de Áreas Naturales Protegidas (CONANP). Recategorización Del Área de Protección de Flora y Fauna “Sierra de Quila”; Diario Oficial: Mexico City, Mexico, 2000; pp. 1–5. Available online: https://simec.conanp.gob.mx/pdf_recategorizacion/64_reca.pdf (accessed on 27 June 2022).
- Jardel-Pelaez, E.J.; Pérez-Salicrup, D.; Alvarado-Celestino, E.; Morfin-Rios, J.E. Principios y Criterios Para El Manejo Del Fuego En Ecosistemas Forestales: Guía de Campo; Comisión Nacional Forestal: Guadalajara, Mexico, 2014.
- Jiménez-Luquín, E. Sierra de Quila: Cómo Ha Ido Cambiando Los Últimos 25 Años Desde La Tragedia? In Memorias. I Foro de Conocimiento, uso y Gestión del Área Natural Protegida Sierra de Quila; Villavicencio-García, R., Santiago-Pérez, A.L., Rosas-Espinoza, V.C., Hernández-López, L., Eds.; Universidad de Guadalajara, Centro Universitario de Ciencias Biológicas y Agropecuarias, Departamento de Producción Forestal: Guadalajara, Mexico, 2011; pp. 1–134. [Google Scholar]
- Chávez-Durán, Á.A.; Olvera-Vargas, M.; Figueroa-Rangel, B.; García, M.; Aguado, I.; Ruiz-Corral, J.A. Mapping Homogeneous Response Areas for Forest Fuel Management Using Geospatial Data, K-Means, and Random Forest Classification. Forests 2022, 13, 1970. [Google Scholar] [CrossRef]
- Olvera-Vargas, M.; Moreno-Gómez, S.; Figueroa-Rangel, B. Sitios Permanentes Para La Investigación Silvícola. Manual Para Su Establecimiento, 1st ed.; Universidad de Guadalajara: Guadalajara, Mexico, 1996; Volume 1. [Google Scholar]
- Rojas-García, F.; De Jong, B.H.J.; Martínez-Zurimendí, P.; Paz-Pellat, F. Database of 478 Allometric Equations to Estimate Biomass for Mexican Trees and Forests. Ann. Sci. 2015, 72, 835–864. [Google Scholar] [CrossRef]
- Bettinger, P.; Boston, K.; Siry, J.; Grebner, D. Forest Management and Planning, 2nd ed.; Academic Press: San Diego, CA, USA, 2016. [Google Scholar]
- Pizaña, J.M.G.; Hernández, J.M.N.; Romero, N.C. Remote Sensing-Based Biomass Estimation. In Environmental Applications of Remote Sensing; Marghany, M., Ed.; InTech: London, UK, 2016. [Google Scholar] [CrossRef]
- Siabato, W.; Guzmán-Manrique, J. La Autocorrelación Espacial y El Desarrollo de La Geografía Cuantitativa. Cuad. De Geogr. Rev. Colomb. De Geogr. 2019, 28, 1–22. [Google Scholar] [CrossRef]
- Poncet, A.M.; Knappenberger, T.; Brodbeck, C.; Fogle, M.; Shaw, J.N.; Ortiz, B.V. Multispectral UAS Data Accuracy for Different Radiometric Calibration Methods. Remote Sens. 2019, 11, 1917. [Google Scholar] [CrossRef]
- Park, J.W.; Yeom, D.J. Method for Establishing Ground Control Points to Realize UAV-Based Precision Digital Maps of Earthwork Sites. J. Asian Archit. Build. Eng. 2022, 21, 110–119. [Google Scholar] [CrossRef]
- Fideicomiso para la Administración del Programa de Desarrollo Forestal del Estado (FIPRODEFO). Monografías de Pinos Nativos Promisorios Para Plantaciones Forestales Comerciales En Jalisco, México; FIPRODEFO: Guadalajara, Mexico, 2001. Available online: https://geoportal.fiprodefo.gob.mx (accessed on 9 November 2023).
- Pérez-Mojica, E.; Valencia-A., S. Estudio Preliminar Del Género Quercus (Fagaceae) En Tamaulipas, México. Acta Bot. Mex. 2017, 120, 59–111. [Google Scholar] [CrossRef]
- Westoby, M.J.; Brasington, J.; Glasser, N.F.; Hambrey, M.J.; Reynolds, J.M. ‘Structure-from-Motion’ Photogrammetry: A Low-Cost, Effective Tool for Geoscience Applications. Geomorphology 2012, 179, 300–314. [Google Scholar] [CrossRef]
- Furukawa, Y.; Curless, B.; Seitz, S.M.; Szeliski, R. Towards Internet-Scale Multi-View Stereo. In Proceedings of the 2010 IEEE Computer Society Conference on Computer Vision and Pattern Recognitio, San Francisco, CA, USA, 13–18 June 2010; pp. 1434–1441. [Google Scholar] [CrossRef]
- Agisoft LLC. Agisoft Metashape User Manual; Agisoft LLC.: St. Petersburg, Russia, 2023. [Google Scholar]
- CloudCompare. 3D Point Cloud and Mesh Processing Software Open Source Project. Available online: https://www.danielgm.net/cc/ (accessed on 4 January 2023).
- Instituto Nacional de Estadística y Geografía (INEGI). Continuo de Elevaciones Mexicano 3.0; INEGI: Aguascalientes, Mexico, 2013. Available online: https://www.inegi.org.mx/app/geo2/elevacionesmex/ (accessed on 7 February 2023).
- Baboo, S.; Devi, R. An Analysis of Different Resampling Methods in Coimbatore, District. Glob. J. Comput. Sci. Technol. 2010, 10, 61–66. [Google Scholar]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Valbuena, R.; Cardil, A.; Mohan, M.; Almeida, D.R.A.; Broadbent, E.N.; Almeyda Zambrano, A.M.; Wilkinson, B.; et al. TREETOP: A Shiny-Based Application and R Package for Extracting Forest Information from LiDAR Data for Ecologists and Conservationists. Methods Ecol. Evol. 2022, 13, 1164–1176. [Google Scholar] [CrossRef]
- Korpela, I.; Anttila, P.; Pitkänen, J. The Performance of a Local Maxima Method for Detecting Individual Tree Tops in Aerial Photographs. Int. J. Remote Sens. 2006, 27, 1159–1175. [Google Scholar] [CrossRef]
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.J.; et al. Imputation of Individual Longleaf Pine (Pinus Palustris Mill.) Tree Attributes from Field and LiDAR Data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Python. Python Software Foundation. Available online: https://www.python.org/ (accessed on 15 June 2023).
- Mohammadpour, P.; Viegas, D.X.; Viegas, C. Vegetation Mapping with Random Forest Using Sentinel 2 and GLCM Texture Feature—A Case Study for Lousã Region, Portugal. Remote Sens. 2022, 14, 4585. [Google Scholar] [CrossRef]
- Kupidura, P. The Comparison of Different Methods of Texture Analysis for Their Efficacy for Land Use Classification in Satellite Imagery. Remote Sens. 2019, 11, 1233. [Google Scholar] [CrossRef]
- Katoh, M.; Gougeon, F.A. Improving the Precision of Tree Counting by Combining Tree Detection with Crown Delineation and Classification on Homogeneity Guided Smoothed High Resolution (50 cm) Multispectral Airborne Digital Data. Remote Sens. 2012, 4, 1411–1424. [Google Scholar] [CrossRef]
- Guerini Filho, M.; Kuplich, T.M.; De Quadros, F.L.F. Estimating Natural Grassland Biomass by Vegetation Indices Using Sentinel 2 Remote Sensing Data. Int. J. Remote Sens. 2020, 41, 2861–2876. [Google Scholar] [CrossRef]
- Greenacre, M.; Groenen, P.J.F.; Hastie, T.; D’Enza, A.I.; Markos, A.; Tuzhilina, E. Principal Component Analysis. Nat. Rev. Methods Primers 2022, 2, 100. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with Erts. NASA Spec. Publ. 1974, 351, 309–317. [Google Scholar]
- Huete, A.R. A Soil-Adjusted Vegetation Index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A Modified Soil Adjusted Vegetation Index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.; Didan, K.; Miura, T. Development of a Two-Band Enhanced Vegetation Index without a Blue Band. Remote Sens. Environ. 2008, 112, 3833–3845. [Google Scholar] [CrossRef]
- Richardson, A.J.; Everitt, J.H. Using Spectral Vegetation Indices to Estimate Rangeland Productivity. Geocarto Int. 1992, 7, 63–69. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Kaufman, Y.J.; Merzlyak, M.N. Use of a Green Channel in Remote Sensing of Global Vegetation from EOS-MODIS. Remote Sens. Environ. 1996, 58, 289–298. [Google Scholar] [CrossRef]
- Sripada, R.P.; Heiniger, R.W.; White, J.G.; Meijer, A.D. Aerial Color Infrared Photography for Determining Early In-Season Nitrogen Requirements in Corn. Agron. J. 2006, 98, 968–977. [Google Scholar] [CrossRef]
- Gianelle, D.; Vescovo, L. Determination of Green Herbage Ratio in Grasslands Using Spectral Reflectance. Methods and Ground Measurements. Int. J. Remote Sens. 2007, 28, 931–942. [Google Scholar] [CrossRef]
- Gitelson, A.; Merzlyak, M.N. Spectral Reflectance Changes Associated with Autumn Senescence of Aesculus hippocastanum L. and Acer platanoides L. Leaves. Spectral Features and Relation to Chlorophyll Estimation. J. Plant Physiol. 1994, 143, 286–292. [Google Scholar] [CrossRef]
- Datt, B. Remote Sensing of Chlorophyll a, Chlorophyll b, Chlorophyll A+b, and Total Carotenoid Content in Eucalyptus Leaves. Remote Sens. Environ. 1998, 66, 111–121. [Google Scholar] [CrossRef]
- Fox, J.; Weisberg, S. An R Companion to Applied Regression, 3rd ed.; Sage: Riverside County, CA, USA, 2018. [Google Scholar]
- Vargha, A.; Delaney, H.D. The Kruskal-Wallis Test and Stochastic Homogeneity. J. Educ. Behav. Stat. 1998, 23, 170–192. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Pal, M. Random Forest Classifier for Remote Sensing Classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Ganesh, N.; Jain, P.; Choudhury, A.; Dutta, P.; Kalita, K.; Barsocchi, P. Random Forest Regression-Based Machine Learning Model for Accurate Estimation of Fluid Flow in Curved Pipes. Processes 2021, 9, 2095. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn Machine Learning in Python. Decision Tree Regression. Available online: https://scikit-learn.org/stable/auto_examples/ensemble/plot_adaboost_regression.html (accessed on 6 June 2023).
- Boonprong, S.; Cao, C.; Chen, W.; Bao, S. Random Forest Variable Importance Spectral Indices Scheme for Burnt Forest Recovery Monitoring—Multilevel RF-VIMP. Remote Sens. 2018, 10, 807. [Google Scholar] [CrossRef]
- Numpy. The Fundamental Package for Scientific Computing with Python. Available online: https://numpy.org (accessed on 15 June 2023).
- Pandas. Pandas: Powerful Python Data Analysis Toolkit. Available online: https://pandas.pydata.org/ (accessed on 15 June 2023).
- Matplotlib. Matplotlib: Visualization with Python. Available online: https://matplotlib.org/ (accessed on 15 June 2023).
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V.; et al. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Geospatial Data Abstraction (GDAL). Translator Library for Raster and Vector Geospatial Data Formats. Available online: https://gdal.org/ (accessed on 15 June 2023).
- Brede, B.; Terryn, L.; Barbier, N.; Bartholomeus, H.M.; Bartolo, R.; Calders, K.; Derroire, G.; Krishna Moorthy, S.M.; Lau, A.; Levick, S.R.; et al. Non-Destructive Estimation of Individual Tree Biomass: Allometric Models, Terrestrial and UAV Laser Scanning. Remote Sens. Environ. 2022, 280, 113180. [Google Scholar] [CrossRef]
- Wickham, H.; Hester, J.; Francois, R.; Bryan, J.; Bearrows, S.; Jylänki, J.; Jørgensen, M. Package ‘readr’. Read Rectangular Text Data. Available online: https://cran.r-project.org/web/packages/readr/readr.pdf (accessed on 15 June 2023).
- Gross, J.; Ligges, U. Package ‘northest’. Tests for Normality. Available online: https://cran.r-project.org/web/packages/nortest/nortest.pdf (accessed on 15 June 2023).
- Fox, J.; Weisberg, S.; Price, B.; Adler, D.; Bates, D.; Baud-Bovy, G.; Bolker, B.; Ellison, S.; Firth, D.; Friendly, M.; et al. Package ‘car’. Companion to Applied Regression. Available online: https://cran.r-project.org/web/packages/car/car.pdf (accessed on 7 July 2023).
- Husson, F.; Josse, J.; Le, S.; Mazet, J. Package ‘FactoMineR’. Available online: https://cran.r-project.org/web/packages/FactoMineR/FactoMineR.pdf (accessed on 16 September 2023).
- Wickham, H.; Chang, W.; Henry, L.; Lin-Pedersen, T.; Takahashi, K.; Wilke, C.; Woo, K.; Yutani, H.; Dunnington, D. Package ‘ggplot2.’ Create Elegant Data Visualisations Using the Grammar of Graphics. Available online: https://cran.r-project.org/web/packages/ggplot2/ggplot2.pdf (accessed on 7 July 2023).
- R Core Team. R: A Language and Environment for Statistical Computing. Available online: https://www.R-project.org/ (accessed on 15 June 2023).
- Villavicencio-García, R.; Bauche-Petersen, P.; Gallegos-Rodríguez, A.; Santiago-Pérez, A.L.; Huerta-Martínez, F.M. Caracterización Estructural y Diversidad de Comunidades Arbóreas de La Sierra de Quila. ibugana 2005, 13, 67–76. [Google Scholar]
- González-Tagle, M.A.; Schwendenmann, L.; Pérez, J.J.; Schulz, R. Forest Structure and Woody Plant Species Composition along a Fire Chronosequence in Mixed Pine–Oak Forest in the Sierra Madre Oriental, Northeast Mexico. Ecol. Manag. 2008, 256, 161–167. [Google Scholar] [CrossRef]
- Rodríguez-Trejo, D.A. Incendios de Vegetación. Su Ecología Manejo e Historia; Colegio de Postgraduados: Montecillo, Mexico, 2014; Volume 1. [Google Scholar]
- Figueroa-Navarro, C.M.; Salcedo Pérez, E.; Gallegos-Rodríguez, A.; Vargas-Larreta, B.; Huerta-Martínez, F.M.; Ángeles-Pérez, G. Dinámica Estructural y Área Basal de Bosques Mixtos En Dos Áreas Naturales Protegidas de Jalisco. Rev. Mex. Cienc. 2023, 14, 4–30. [Google Scholar] [CrossRef]
- Rosas-Chavoya, M.; López-Serrano, P.M.; Vega-Nieva, D.J.; Hernández-Díaz, J.C.; Wehenkel, C.; Corral-Rivas, J.J. Estimating Above-Ground Biomass from Land Surface Temperature and Evapotranspiration Data at the Temperate Forests of Durango, Mexico. Forests 2023, 14, 299. [Google Scholar] [CrossRef]
- Lin, J.; Chen, D.; Yang, S.; Liao, X. Precise Aboveground Biomass Estimation of Plantation Forest Trees Using the Novel Allometric Model and UAV-Borne LiDAR. Front. For. Glob. Change 2023, 6, 1166349. [Google Scholar] [CrossRef]
- Rubio-Camacho, E.A.; González-Tagle, M.A.; Himmelsbach, W.; Ávila-Flores, D.Y.; Alanís-Rodríguez, E.; Jiménez-Pérez, J. Patrones de Distribución Espacial Del Arbolado En Un Bosque Mixto de Pino-Encino Del Noreste de México. Rev. Mex. Biodivers. 2017, 88, 113–121. [Google Scholar] [CrossRef]
- Lian, X.; Zhang, H.; Xiao, W.; Lei, Y.; Ge, L.; Qin, K.; He, Y.; Dong, Q.; Li, L.; Han, Y.; et al. Biomass Calculations of Individual Trees Based on Unmanned Aerial Vehicle Multispectral Imagery and Laser Scanning Combined with Terrestrial Laser Scanning in Complex Stands. Remote Sens. 2022, 14, 4715. [Google Scholar] [CrossRef]
- Coomes, D.A.; Dalponte, M.; Jucker, T.; Asner, G.P.; Banin, L.F.; Burslem, D.F.R.P.; Lewis, S.L.; Nilus, R.; Phillips, O.L.; Phua, M.-H.; et al. Area-Based vs Tree-Centric Approaches to Mapping Forest Carbon in Southeast Asian Forests from Airborne Laser Scanning Data. Remote Sens. Environ. 2017, 194, 77–88. [Google Scholar] [CrossRef]
- Knapp, N.; Fischer, R.; Huth, A. Linking Lidar and Forest Modeling to Assess Biomass Estimation across Scales and Disturbance States. Remote Sens. Environ. 2018, 205, 199–209. [Google Scholar] [CrossRef]
- Guerra-Hernandez, J.; Gonzalez-Ferreiro, E.; Sarmento, A.; Silva, J.; Nunes, A.; Correia, A.C.; Fontes, L.; Tomé, M.; Diaz-Varela, R. Short Communication. Using High Resolution UAV Imagery to Estimate Tree Variables in Pinus Pinea Plantation in Portugal. System 2016, 25, eSC09. [Google Scholar] [CrossRef]
- Vastaranta, M.; Wulder, M.A.; White, J.C.; Pekkarinen, A.; Tuominen, S.; Ginzler, C.; Kankare, V.; Holopainen, M.; Hyyppä, J.; Hyyppä, H. Airborne Laser Scanning and Digital Stereo Imagery Measures of Forest Structure: Comparative Results and Implications to Forest Mapping and Inventory Update. Can. J. Remote Sens. 2013, 39, 382–395. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Equation |
|---|---|
| Pinus devoniana | |
| Pinus douglasiana Pinus lumholtzii | |
| Pinus oocarpa | |
| Quercus laeta | |
| Quercus candicans Quercus coccolobifolia Quercus obtusata Quercus resinosa | |
| Quercus rugosa | |
| Arbutus tessellata Arbutus xalapensis |
| Vegetation Index | Equation | Reference |
|---|---|---|
| Normalized Difference Vegetation Index (NDVI) | Rouse et al. (1974) [56] | |
| Soil Adjusted Vegetation Index (SAVI) | Huete (1988) [57] | |
| Modified Soil Adjusted Vegetation Index (MSAVI) | Qi et al. (1994) [58] | |
| 2-band Enhanced Vegetation Index (EVI2) | Jiang et al. (2008) [59] | |
| Difference Vegetation Index (DVI) | Richardson & Everitt (1992) [60] | |
| Green Normalized Vegetation Index (GNDVI) | Gitelson et al. (1996) [61] | |
| Green Ratio Vegetation Index (GRVI) | Sripada et al. (2006) [62] | |
| Green Difference Index (GDI) | Gianelle and Vescovo (2007) [63] | |
| Green Red Difference Index (GRDI) | Gianelle and Vescovo (2007) [63] | |
| Red edge normalized difference vegetation index (NDVIre) | Gitelson and Merzlyak (1994) [64] | |
| Red edge simple ratio (SRre) | Gitelson and Merzlyak (1994) [64] | |
| Datt4 | Datt (1998) [65] |
| Plot | Genus | Number of Trees | Dg cm | BA m2 | TH m | GCC m2 | CFL Mg |
|---|---|---|---|---|---|---|---|
| 1 | Pinus | 202 | 35.88 | 20.42 | 19.74 (1.06) | 8078.60 | 134.37 |
| 1 | Quercus | 339 | 15.81 | 6.65 | 12.92 (0.51) | 3913.88 | 29.10 |
| 2 | Pinus | 129 | 46.66 | 22.05 | 25.37 (1.52) | 6451.49 | 120.57 |
| 2 | Quercus | 107 | 25.28 | 5.37 | 16.02 (1.17) | 3537.99 | 30.50 |
| 3 | Pinus | 156 | 40.73 | 20.32 | 25.38 (1.21) | 7097.84 | 75.52 |
| 3 | Quercus | 166 | 21.18 | 5.85 | 11.21 (0.80) | 3123.20 | 25.07 |
| 3 | Arbutus | 9 | 17.92 | 0.23 | 8.79 (3.07) | 131.160 | 0.72 |
| Plot | Genus | MI | p-Value |
|---|---|---|---|
| P1 | Pinus | +0.177 | <0.05 * |
| P1 | Quercus | +0.077 | <0.05 * |
| P2 | Pinus | +0.209 | <0.05 * |
| P2 | Quercus | +0.033 | 0.51 |
| P3 | Pinus | +0.032 | 0.45 |
| P3 | Quercus | +0.012 | 0.61 |
| P3 | Arbutus | +0.107 | 0.42 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chávez-Durán, Á.A.; García, M.; Olvera-Vargas, M.; Aguado, I.; Figueroa-Rangel, B.L.; Trucíos-Caciano, R.; Rubio-Camacho, E.A. Forest Canopy Fuel Loads Mapping Using Unmanned Aerial Vehicle High-Resolution Red, Green, Blue and Multispectral Imagery. Forests 2024, 15, 225. https://doi.org/10.3390/f15020225
Chávez-Durán ÁA, García M, Olvera-Vargas M, Aguado I, Figueroa-Rangel BL, Trucíos-Caciano R, Rubio-Camacho EA. Forest Canopy Fuel Loads Mapping Using Unmanned Aerial Vehicle High-Resolution Red, Green, Blue and Multispectral Imagery. Forests. 2024; 15(2):225. https://doi.org/10.3390/f15020225
Chicago/Turabian StyleChávez-Durán, Álvaro Agustín, Mariano García, Miguel Olvera-Vargas, Inmaculada Aguado, Blanca Lorena Figueroa-Rangel, Ramón Trucíos-Caciano, and Ernesto Alonso Rubio-Camacho. 2024. "Forest Canopy Fuel Loads Mapping Using Unmanned Aerial Vehicle High-Resolution Red, Green, Blue and Multispectral Imagery" Forests 15, no. 2: 225. https://doi.org/10.3390/f15020225