
MISF: A Method for Measurement of Standing Tree Size via Multi-Vision Image Segmentation and Coordinate Fusion


Abstract
:1. Introduction
2. Materials and Methods
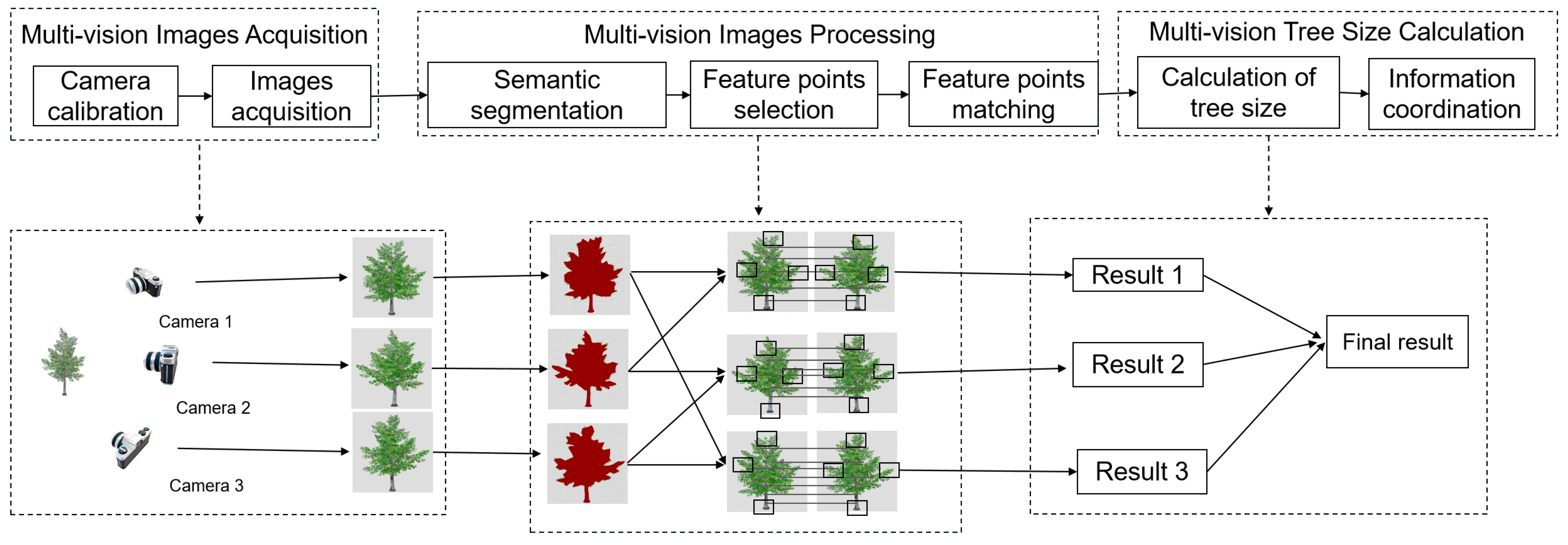
2.1. Main Ideas
2.2. Multiple Vision Image Acquisition
2.2.1. Single Camera Calibration
2.2.2. Trinocular Vision Calibration
2.2.3. Image Acquisition
2.3. Multiple Vision Image Processing
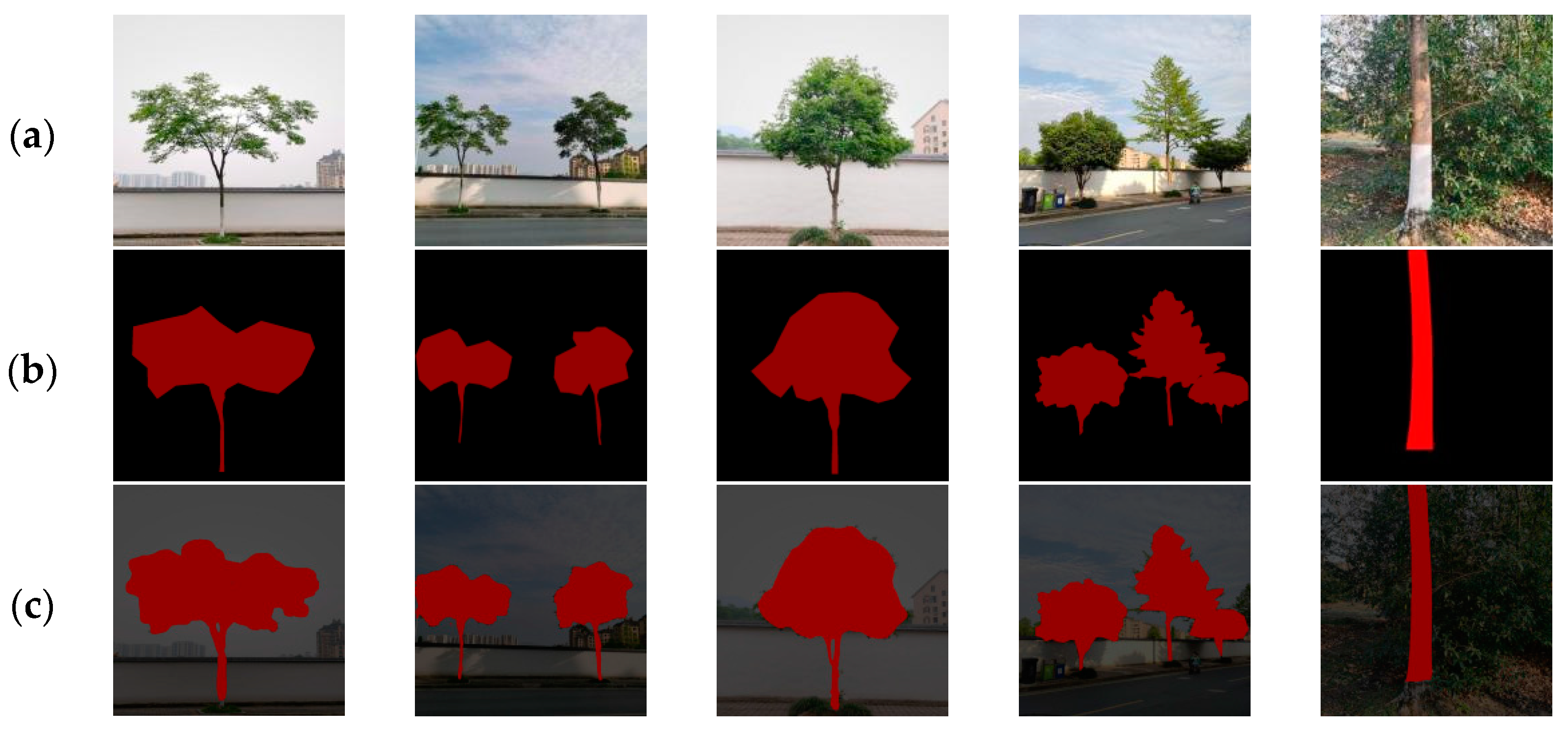
2.3.1. Semantic Segmentation of Tree Images Based on Deep Learning
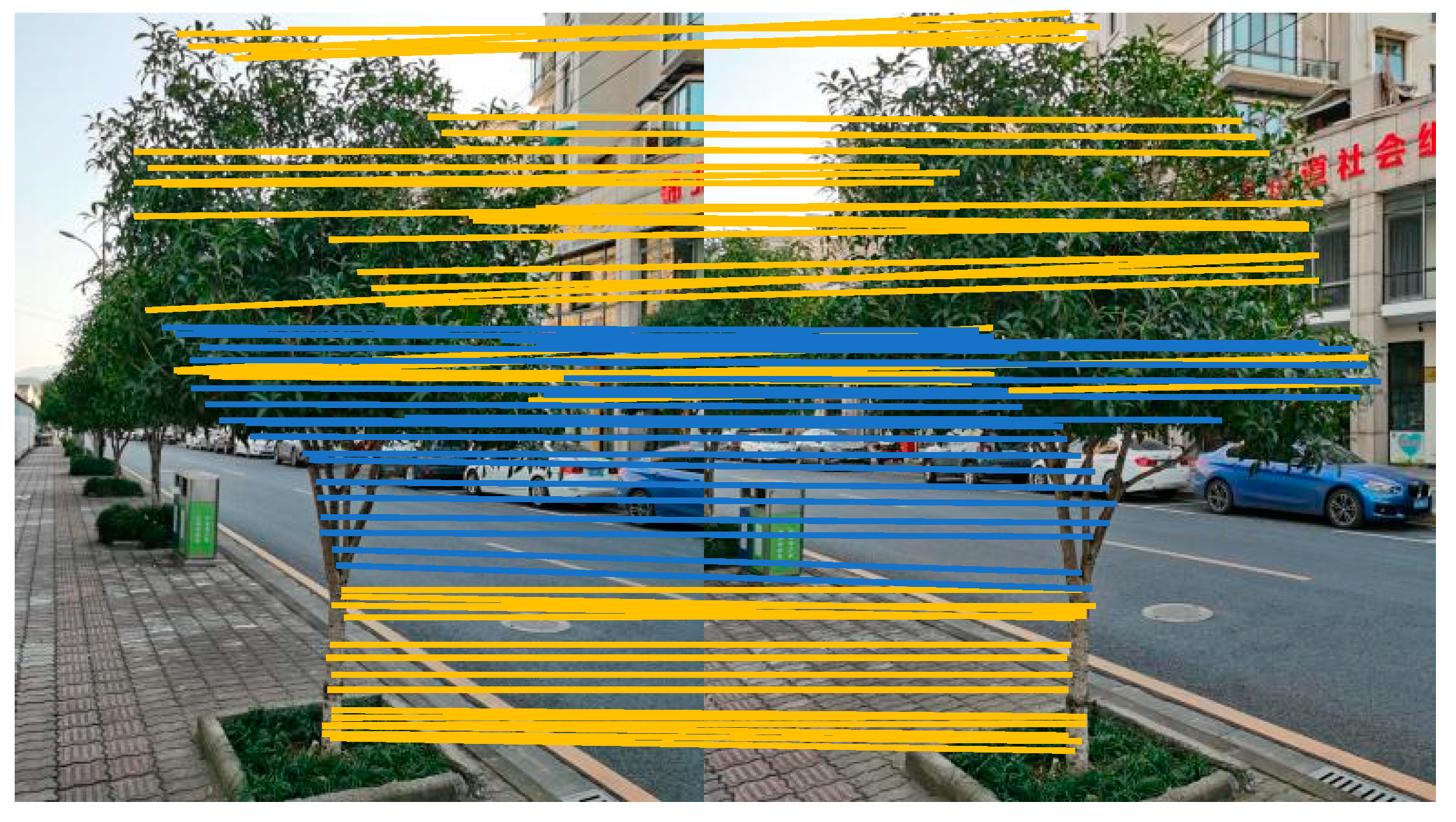
2.3.2. Image Feature Point Extraction and Matching
2.4. Measurement of Multi-Vision Standing Tree Size
2.4.1. Trinocular Convergence Vision Model
2.4.2. Solving the Initial Value in 3D Space
2.4.3. Coordinate Fusion
2.4.4. Measurement of Standing Tree Size
2.5. Experimental Design
2.5.1. Datasets
2.5.2. Evaluation Indicators
2.5.3. Comparison Methods
2.5.4. Experimental Scheme
3. Results
3.1. Results of Standing Tree Segmentation
3.2. Measurement of Tree Height
3.3. Measurement of DBH
3.4. Measurement of Crown Width
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mokroš, M.; Liang, X.; Surový, P.; Valent, P.; Čerňava, J.; Chudý, F.; Tunák, D.; Saloň, Š.; Merganič, J. Evaluation of close-range photogrammetry image collection methods for estimating tree diameters. ISPRS Int. J. Geo-Inf. 2018, 7, 93. [Google Scholar] [CrossRef]
- Yang, Z.; Liu, Q.; Luo, P.; Ye, Q.; Duan, G.; Sharma, R.P.; Zhang, H.; Wang, G.; Fu, L. Prediction of individual tree diameter and height to crown base using nonlinear simultaneous regression and airborne LiDAR data. Remote Sens. 2020, 12, 2238. [Google Scholar] [CrossRef]
- Cabo, C.; Ordóñez, C.; López-Sánchez, C.A.; Armesto, J. Automatic dendrometry: Tree detection, tree height and diameter estimation using terrestrial laser scanning. Int. J. Appl. Earth Obs. Geoinf. 2018, 69, 164–174. [Google Scholar] [CrossRef]
- Chu, T.; Starek, M.J.; Brewer, M.J.; Murray, S.C. MULTI-platform uas imaging for crop height estimation: Performance analysis over an experimental maize field. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 4338–4341. [Google Scholar]
- Dyce, D.R.; Voogt, J.A. The influence of tree crowns on urban thermal effective anisotropy. Urban Clim. 2018, 23, 91–113. [Google Scholar] [CrossRef]
- Indirabai, I.; Nair, M.H.; Jaishanker, R.N.; Nidamanuri, R.R. Terrestrial laser scanner based 3D reconstruction of trees and retrieval of leaf area index in a forest environment. Ecol. Inform. 2019, 53, 100986. [Google Scholar] [CrossRef]
- Shi, Y.; Wang, S.; Zhou, S.; Kamruzzaman, M. Study on modeling method of forest tree image recognition based on CCD and theodolite. IEEE Access 2020, 8, 159067–159076. [Google Scholar] [CrossRef]
- Li, S.; Fang, L.; Sun, Y.; Xia, L.; Lou, X. Development of Measuring Device for Diameter at Breast Height of Trees. Forests 2023, 14, 192. [Google Scholar] [CrossRef]
- Olofsson, K.; Holmgren, J.; Olsson, H. Tree stem and height measurements using terrestrial laser scanning and the RANSAC algorithm. Remote Sens. 2014, 6, 4323–4344. [Google Scholar] [CrossRef]
- Yuan, F.; Fang, L.; Sun, L.; Zheng, S.; Zheng, X. Development of a portable measuring device for diameter at breast height and tree height Entwicklung eines tragbaren Messgerätes für Durchmesser in Brusthöhe und Baumhöhe. Aust. J. Forensic Sci. 2021, 138, 25–50. [Google Scholar]
- Wang, J.; Wang, X.; Liu, F.; Gong, Y.; Wang, H.; Qin, Z. Modeling of binocular stereo vision for remote coordinate measurement and fast calibration. Opt. Lasers Eng. 2014, 54, 269–274. [Google Scholar] [CrossRef]
- Yang, Y.; Tang, D.; Wang, D.; Song, W.; Wang, J.; Fu, M. Multi-camera visual SLAM for off-road navigation. Robot. Auton. Syst. 2020, 128, 103505. [Google Scholar] [CrossRef]
- Berveglieri, A.; Tommaselli, A.; Liang, X.; Honkavaara, E. Photogrammetric measurement of tree stems from vertical fisheye images. Scand. J. For. Res. 2016, 32, 737–747. [Google Scholar] [CrossRef]
- Krause, S.; Sanders, T.G.M.; Mund, J.-P.; Greve, K. UAV-Based Photogrammetric Tree Height Measurement for Intensive Forest Monitoring. Remote Sens. 2019, 11, 758. [Google Scholar] [CrossRef]
- Ramli, M.F.; Tahar, K.N. Homogeneous tree height derivation from tree crown delineation using Seeded Region Growing (SRG) segmentation. Geo-Spat. Inf. Sci. 2020, 23, 195–208. [Google Scholar] [CrossRef]
- Wu, X.; Zhou, S.; Xu, A.; Chen, B. Passive measurement method of tree diameter at breast height using a smartphone. Comput. Electron. Agric. 2019, 163, 104875. [Google Scholar] [CrossRef]
- Yang, L.; Wang, B.; Zhang, R.; Zhou, H.; Wang, R. Analysis on location accuracy for the binocular stereo vision system. IEEE Photonics J. 2017, 10, 1–16. [Google Scholar] [CrossRef]
- Zhang, Z. Flexible camera calibration by viewing a plane from unknown orientations. In Proceedings of the Seventh Ieee International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999; pp. 666–673. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef]
- Wu, C.; Agarwal, S.; Curless, B.; Seitz, S.M. Multicore bundle adjustment. In Proceedings of the CVPR 2011, Colorado Springs, CO, USA, 20–25 June 2011; pp. 3057–3064. [Google Scholar]
- Shi, L.; Wang, G.; Mo, L.; Yi, X.; Wu, X.; Wu, P. Automatic Segmentation of Standing Trees from Forest Images Based on Deep Learning. Sensors 2022, 22, 6663. [Google Scholar] [CrossRef]
- Huang, L.; Chen, C.; Shen, H.; He, B. Adaptive registration algorithm of color images based on SURF. Measurement 2015, 66, 118–124. [Google Scholar] [CrossRef]
- Fan, P.; Men, A.; Chen, M.; Yang, B. Color-SURF: A surf descriptor with local kernel color histograms. In Proceedings of the 2009 IEEE International Conference on Network Infrastructure and Digital Content, Beijing, China, 6–8 November 2009; pp. 726–730. [Google Scholar]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Zhou, Y.; Li, Q.; Chu, L.; Ma, Y.; Zhang, J. A measurement system based on internal cooperation of cameras in binocular vision. Meas. Sci. Technol. 2020, 31, 065002. [Google Scholar] [CrossRef]
- Ganz, S.; Käber, Y.; Adler, P. Measuring tree height with remote sensing—A comparison of photogrammetric and LiDAR data with different field measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef]
- Putra, B.T.W.; Ramadhani, N.J.; Soedibyo, D.W.; Marhaenanto, B.; Indarto, I.; Yualianto, Y. The use of computer vision to estimate tree diameter and circumference in homogeneous and production forests using a non-contact method. For. Sci. Technol. 2021, 17, 32–38. [Google Scholar] [CrossRef]
- Xinmei, W.; Aijun, X.; Tingting, Y. Passive measurement method of tree height and crown diameter using a smartphone. IEEE Access 2020, 8, 11669–11678. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sample | True Value (m) | Binocular Measurement | MISF | ||
|---|---|---|---|---|---|
| Results (m) | Relative Error (%) | Results (m) | Relative Error (%) | ||
| 1 | 8.76 | 9.13 | 4.27 | 8.51 | 2.83 |
| 2 | 7.83 | 8.05 | 2.83 | 7.96 | 1.63 |
| 3 | 7.62 | 7.42 | 2.69 | 7.44 | 2.35 |
| 4 | 6.37 | 6.55 | 2.83 | 6.49 | 1.96 |
| 5 | 6.35 | 6.08 | 4.26 | 6.49 | 2.15 |
| 6 | 5.66 | 5.73 | 1.28 | 5.61 | 0.91 |
| 7 | 5.64 | 5.86 | 3.98 | 5.55 | 1.56 |
| 8 | 5.52 | 5.73 | 3.89 | 5.61 | 1.69 |
| 9 | 5.49 | 5.26 | 4.13 | 5.38 | 1.98 |
| 10 | 5.41 | 5.60 | 3.51 | 5.54 | 2.46 |
| 11 | 5.33 | 5.57 | 4.53 | 5.45 | 2.22 |
| 12 | 5.12 | 5.30 | 3.46 | 5.02 | 1.89 |
| 13 | 4.98 | 4.79 | 3.81 | 5.04 | 1.25 |
| 14 | 4.69 | 4.88 | 4.12 | 4.60 | 1.86 |
| 15 | 4.62 | 4.44 | 3.89 | 4.68 | 1.23 |
| 16 | 4.56 | 4.69 | 2.83 | 4.46 | 2.11 |
| 17 | 4.48 | 4.68 | 4.38 | 4.59 | 2.56 |
| 18 | 4.39 | 4.58 | 4.25 | 4.47 | 1.86 |
| 19 | 4.25 | 4.45 | 4.67 | 4.35 | 2.36 |
| 20 | 3.89 | 4.03 | 3.69 | 3.82 | 1.77 |
| 21 | 3.69 | 3.57 | 3.22 | 3.76 | 1.89 |
| 22 | 3.66 | 3.77 | 2.89 | 3.63 | 0.76 |
| 23 | 3.36 | 3.55 | 5.53 | 3.43 | 2.05 |
| 24 | 3.25 | 3.39 | 4.32 | 3.16 | 2.91 |
| 25 | 3.15 | 3.27 | 3.86 | 3.18 | 0.95 |
| Average | - | - | 3.72 | - | 1.89 |
| Sample | True Value (cm) | Binocular Measurement | MISF | ||
|---|---|---|---|---|---|
| Results (cm) | Relative Error (%) | Results (cm) | Relative Error (%) | ||
| 1 | 30.63 | 31.65 | 3.32 | 31.23 | 1.95 |
| 2 | 27.56 | 26.66 | 3.25 | 26.96 | 2.19 |
| 3 | 26.92 | 27.91 | 3.69 | 27.58 | 2.47 |
| 4 | 26.39 | 25.48 | 3.46 | 25.78 | 2.31 |
| 5 | 25.69 | 26.61 | 3.59 | 26.28 | 2.28 |
| 6 | 25.46 | 26.39 | 3.65 | 25.97 | 1.99 |
| 7 | 23.58 | 22.67 | 3.88 | 23.05 | 2.23 |
| 8 | 22.69 | 21.83 | 3.79 | 23.14 | 1.98 |
| 9 | 21.58 | 20.69 | 4.12 | 21.11 | 2.18 |
| 10 | 20.31 | 19.58 | 3.59 | 20.76 | 2.21 |
| 11 | 20.16 | 21.02 | 4.25 | 20.65 | 2.42 |
| 12 | 19.55 | 18.73 | 4.19 | 20.01 | 2.36 |
| 13 | 19.23 | 18.39 | 4.36 | 18.77 | 2.41 |
| 14 | 18.65 | 17.86 | 4.22 | 19.12 | 2.53 |
| 15 | 18.57 | 19.34 | 4.17 | 18.11 | 2.49 |
| 16 | 17.69 | 16.89 | 4.54 | 18.13 | 2.51 |
| 17 | 17.63 | 16.84 | 4.46 | 17.19 | 2.48 |
| 18 | 17.56 | 16.79 | 4.39 | 18.00 | 2.52 |
| 19 | 16.75 | 17.46 | 4.25 | 16.35 | 2.39 |
| 20 | 16.24 | 16.95 | 4.37 | 16.71 | 2.88 |
| 21 | 15.36 | 14.68 | 4.45 | 15.76 | 2.59 |
| 22 | 14.52 | 15.17 | 4.51 | 14.13 | 2.68 |
| 23 | 13.67 | 13.06 | 4.48 | 14.01 | 2.46 |
| 24 | 13.27 | 13.87 | 4.54 | 12.87 | 2.98 |
| 25 | 10.71 | 11.19 | 4.46 | 11.04 | 3.12 |
| Average | - | - | 4.07 | - | 2.42 |
| Sample | True Value (m) | Binocular Measurement | MISF | ||
|---|---|---|---|---|---|
| Results (m) | Relative Error (%) | Results (m) | Relative Error (%) | ||
| 1 | 4.89 | 5.14 | 5.11 | 5.06 | 3.56 |
| 2 | 4.69 | 4.43 | 5.62 | 4.84 | 3.12 |
| 3 | 4.6 | 4.42 | 3.81 | 4.44 | 3.46 |
| 4 | 4.56 | 4.80 | 5.23 | 4.69 | 2.86 |
| 5 | 4.43 | 4.25 | 4.05 | 4.28 | 3.32 |
| 6 | 4.28 | 4.49 | 4.79 | 4.40 | 2.69 |
| 7 | 4.18 | 4.40 | 5.22 | 4.33 | 3.58 |
| 8 | 3.73 | 3.57 | 4.28 | 3.63 | 2.76 |
| 9 | 3.69 | 3.87 | 4.81 | 3.83 | 3.69 |
| 10 | 3.63 | 3.51 | 3.42 | 3.70 | 2.06 |
| 11 | 3.62 | 3.82 | 5.49 | 3.79 | 4.64 |
| 12 | 3.59 | 3.41 | 4.99 | 3.47 | 3.46 |
| 13 | 3.51 | 3.72 | 5.95 | 3.58 | 2.13 |
| 14 | 3.47 | 3.29 | 5.07 | 3.57 | 2.98 |
| 15 | 3.46 | 3.68 | 6.36 | 3.28 | 5.23 |
| 16 | 3.42 | 3.19 | 6.67 | 3.52 | 2.83 |
| 17 | 3.36 | 3.54 | 5.36 | 3.25 | 3.19 |
| 18 | 3.14 | 3.33 | 6.12 | 3.25 | 3.36 |
| 19 | 3.12 | 2.97 | 4.77 | 3.04 | 2.69 |
| 20 | 2.93 | 3.08 | 4.96 | 3.03 | 3.46 |
| 21 | 2.68 | 2.54 | 5.06 | 2.75 | 2.79 |
| 22 | 2.61 | 2.75 | 5.43 | 2.52 | 3.35 |
| 23 | 2.39 | 2.25 | 5.69 | 2.45 | 2.49 |
| 24 | 2.14 | 1.99 | 6.86 | 2.17 | 1.31 |
| 25 | 2.03 | 1.94 | 4.26 | 1.95 | 3.82 |
| Average | - | - | 5.17 | - | 3.15 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mo, L.; Shi, L.; Wang, G.; Yi, X.; Wu, P.; Wu, X. MISF: A Method for Measurement of Standing Tree Size via Multi-Vision Image Segmentation and Coordinate Fusion. Forests 2023, 14, 1054. https://doi.org/10.3390/f14051054
Mo L, Shi L, Wang G, Yi X, Wu P, Wu X. MISF: A Method for Measurement of Standing Tree Size via Multi-Vision Image Segmentation and Coordinate Fusion. Forests. 2023; 14(5):1054. https://doi.org/10.3390/f14051054
Chicago/Turabian StyleMo, Lufeng, Lijuan Shi, Guoying Wang, Xiaomei Yi, Peng Wu, and Xiaoping Wu. 2023. "MISF: A Method for Measurement of Standing Tree Size via Multi-Vision Image Segmentation and Coordinate Fusion" Forests 14, no. 5: 1054. https://doi.org/10.3390/f14051054