
Hierarchical Task Analysis (HTA) for Application Research on Operator Work Practices and the Design of Training and Support Systems for Forestry Harvester
 ,
,
Abstract
:1. Introduction
1.1. The Concept of Hierarchical Task Analysis
1.2. HTA in the Context of Highly Mechanized Forestry Work
2. Materials and Methods
2.1. Approach to HTA in Forestry Timber Harvesting
2.2. HTA—Level of Detail
3. Results and Analysis of the HTA of Forest Operations
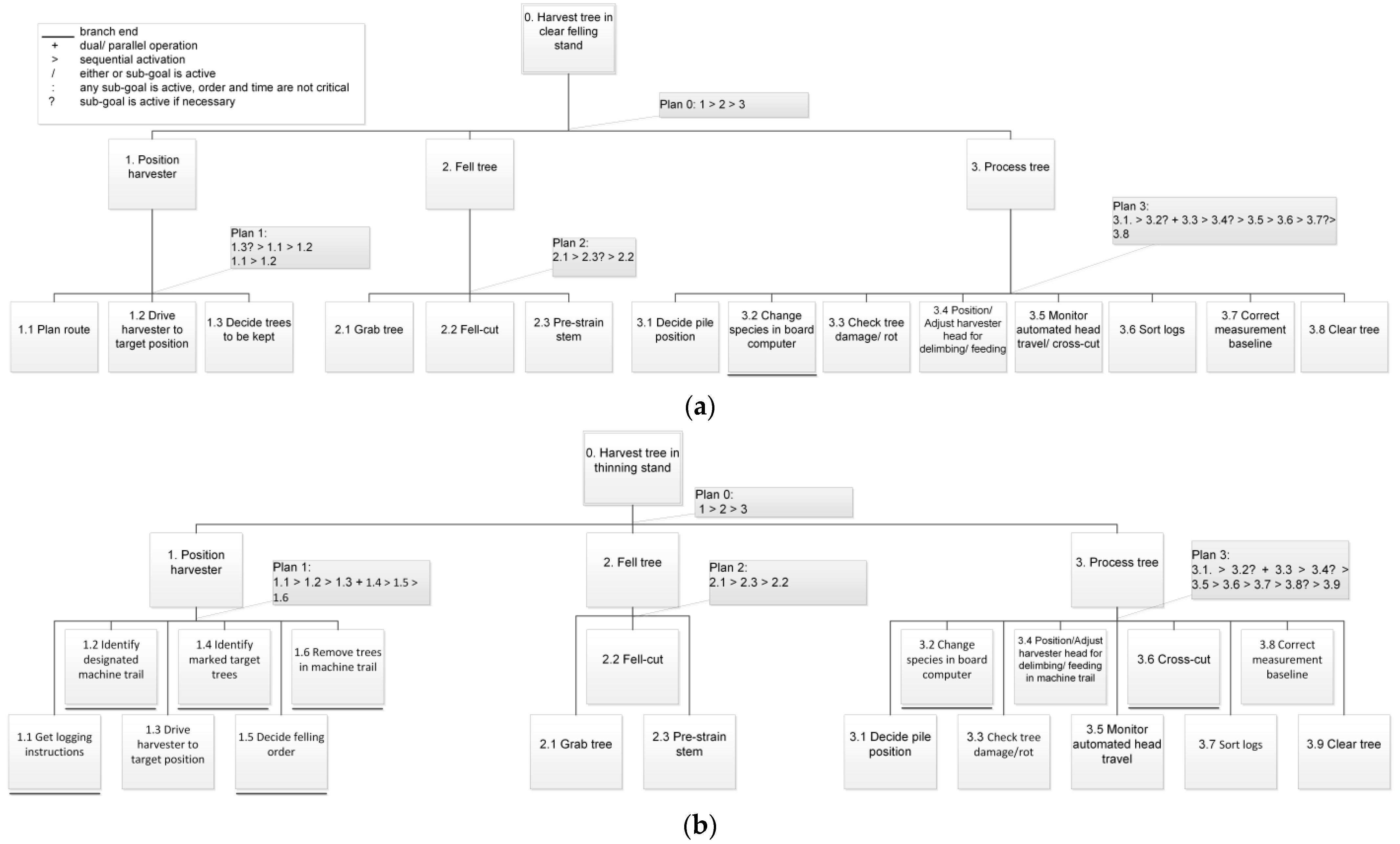
3.1. Higher-Level Goals of Clear Felling and Stand Thinning
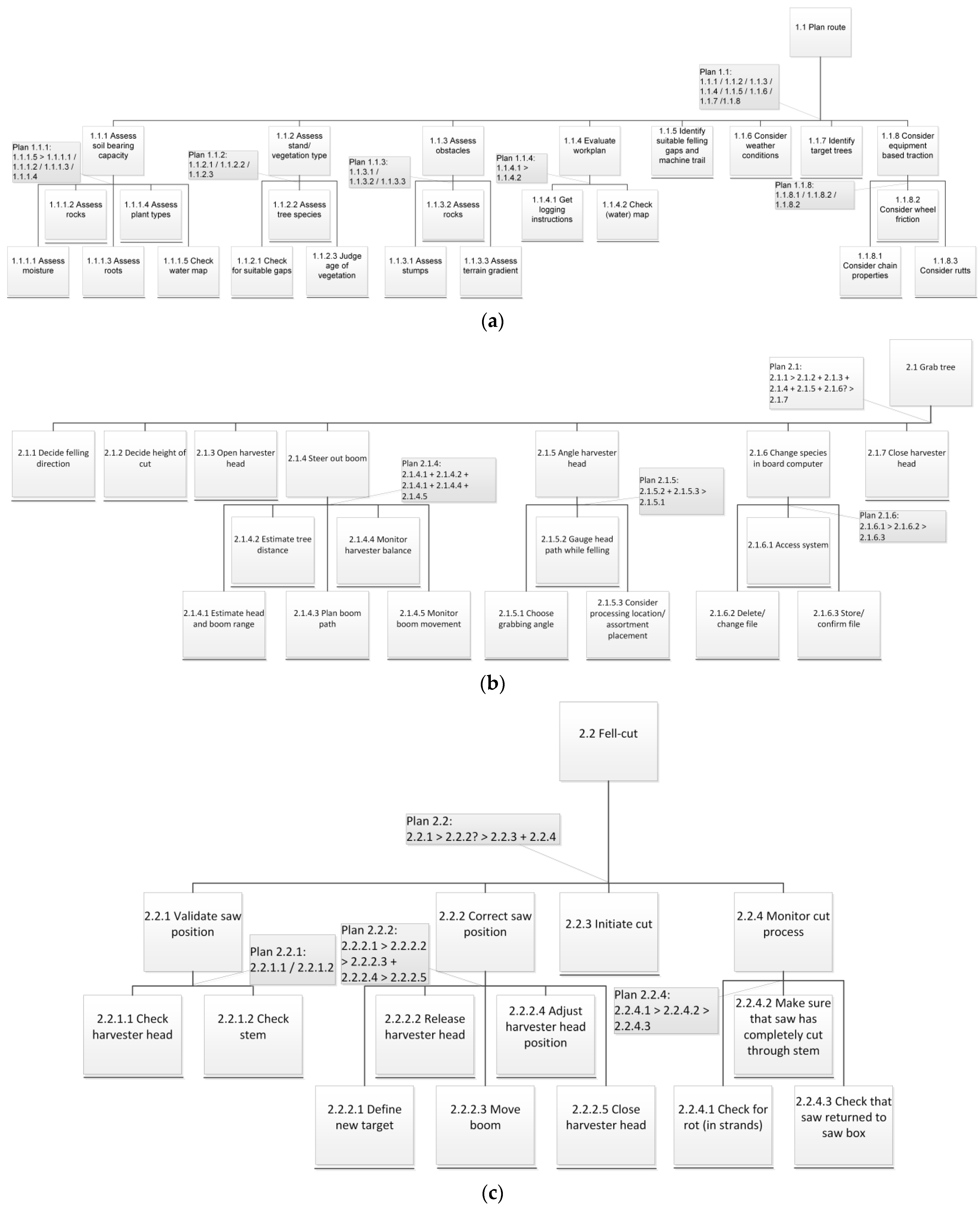
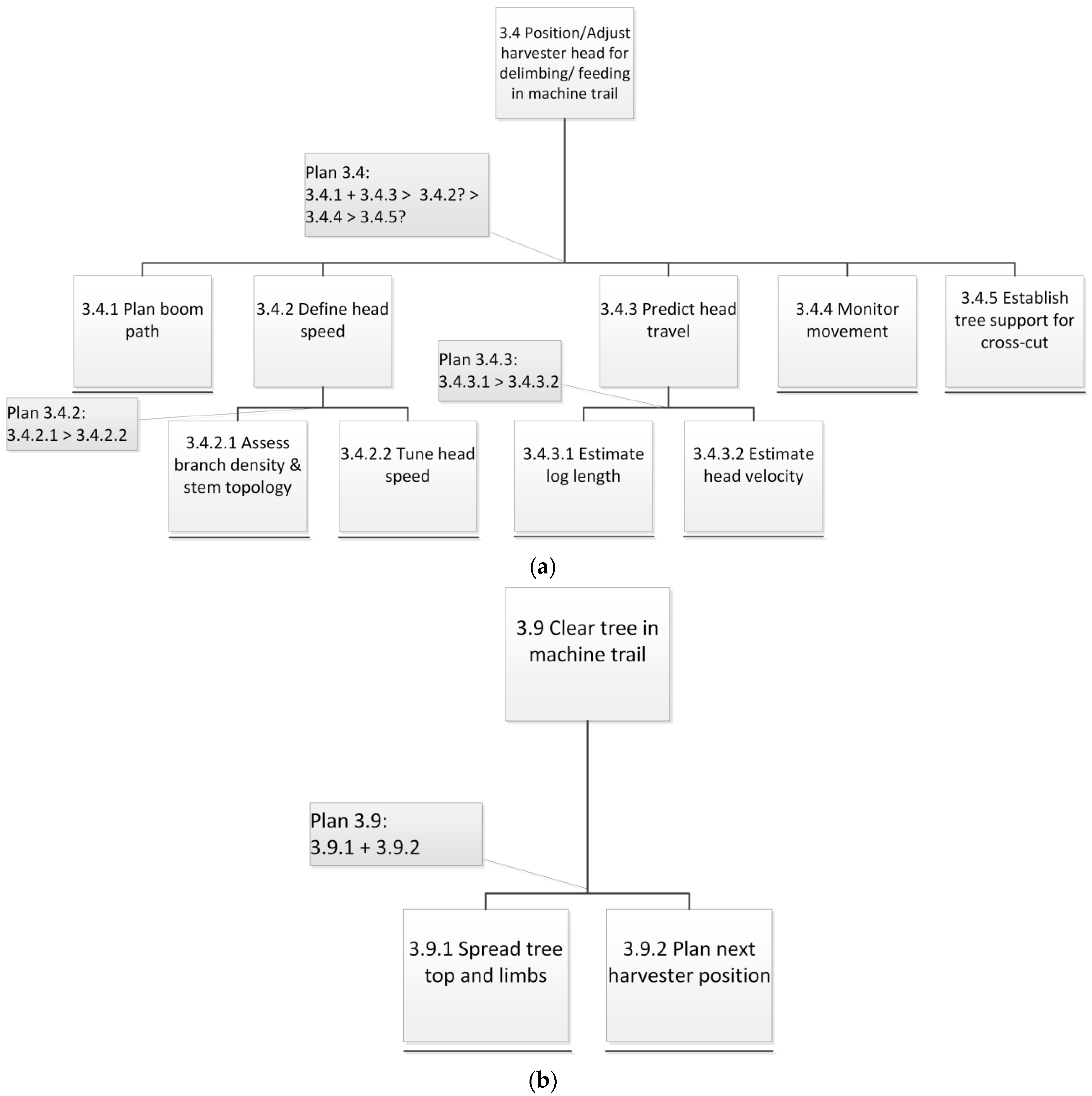
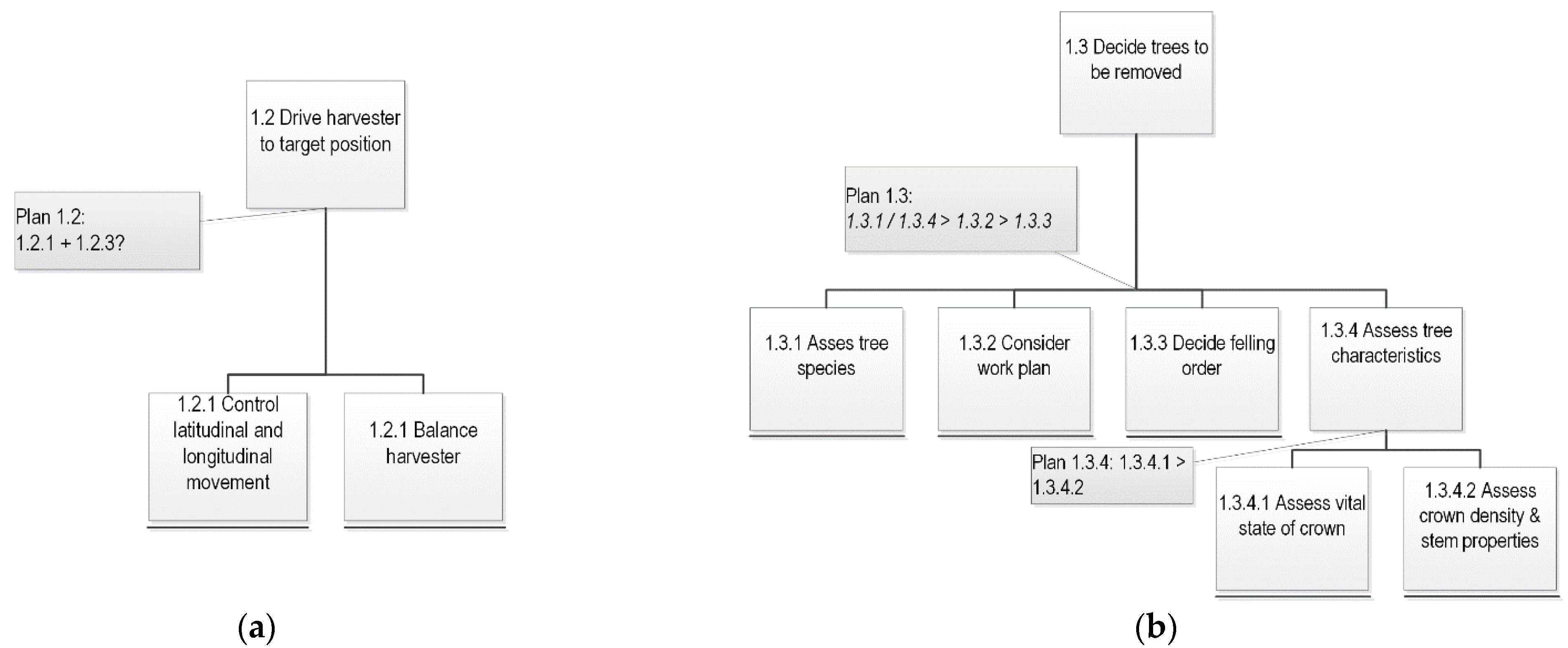
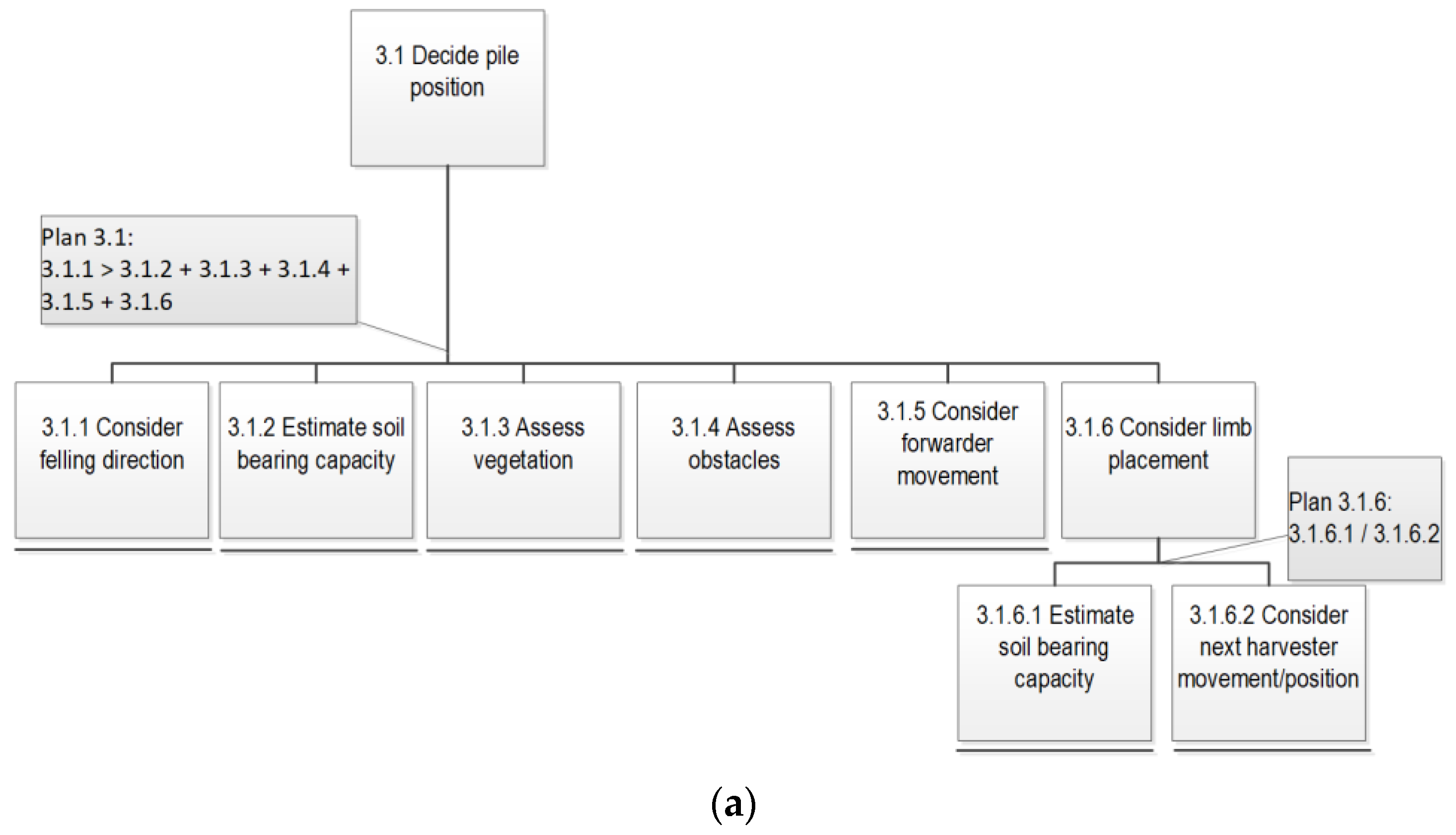
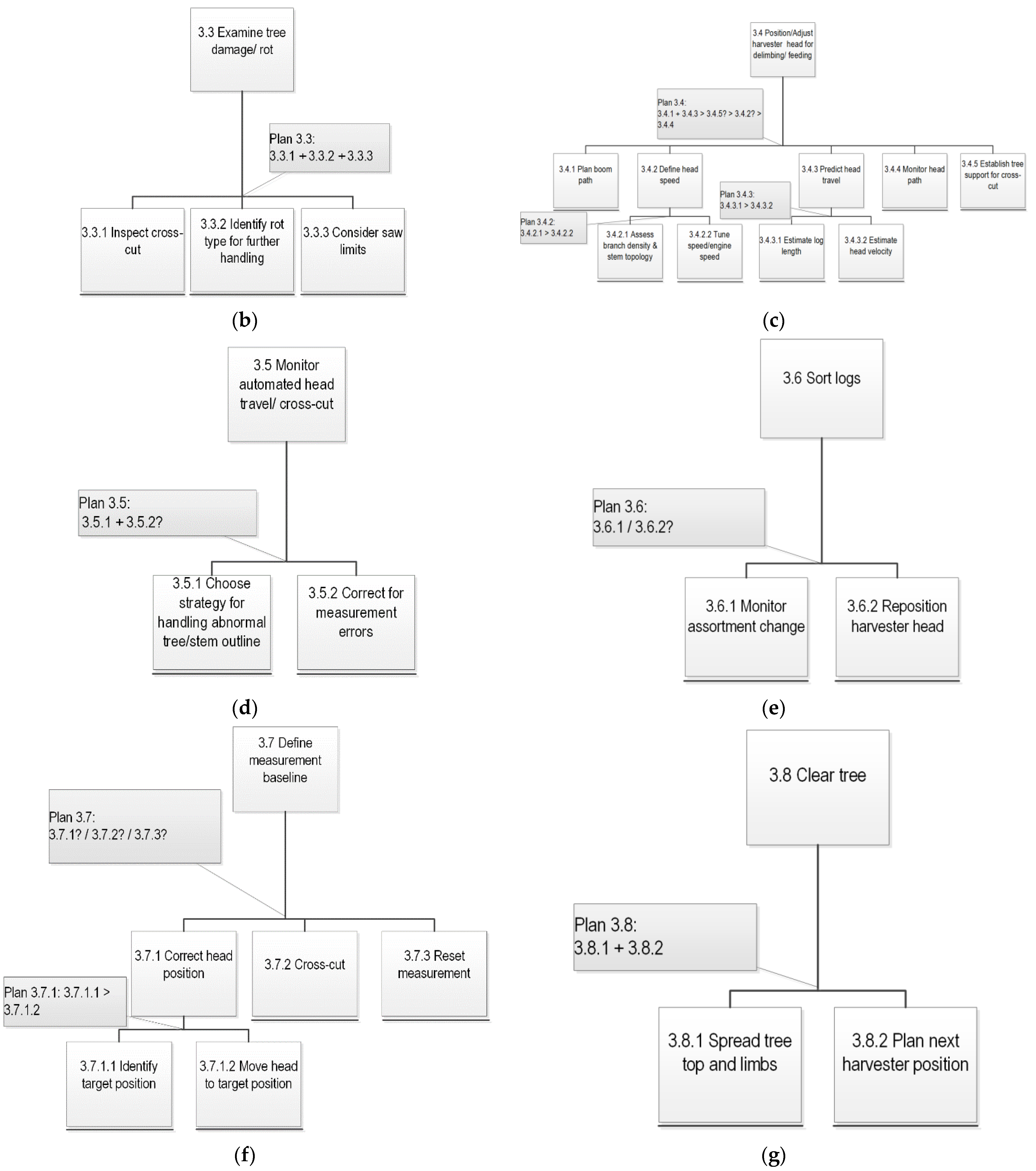
3.2. Detailing HTA Subgoals
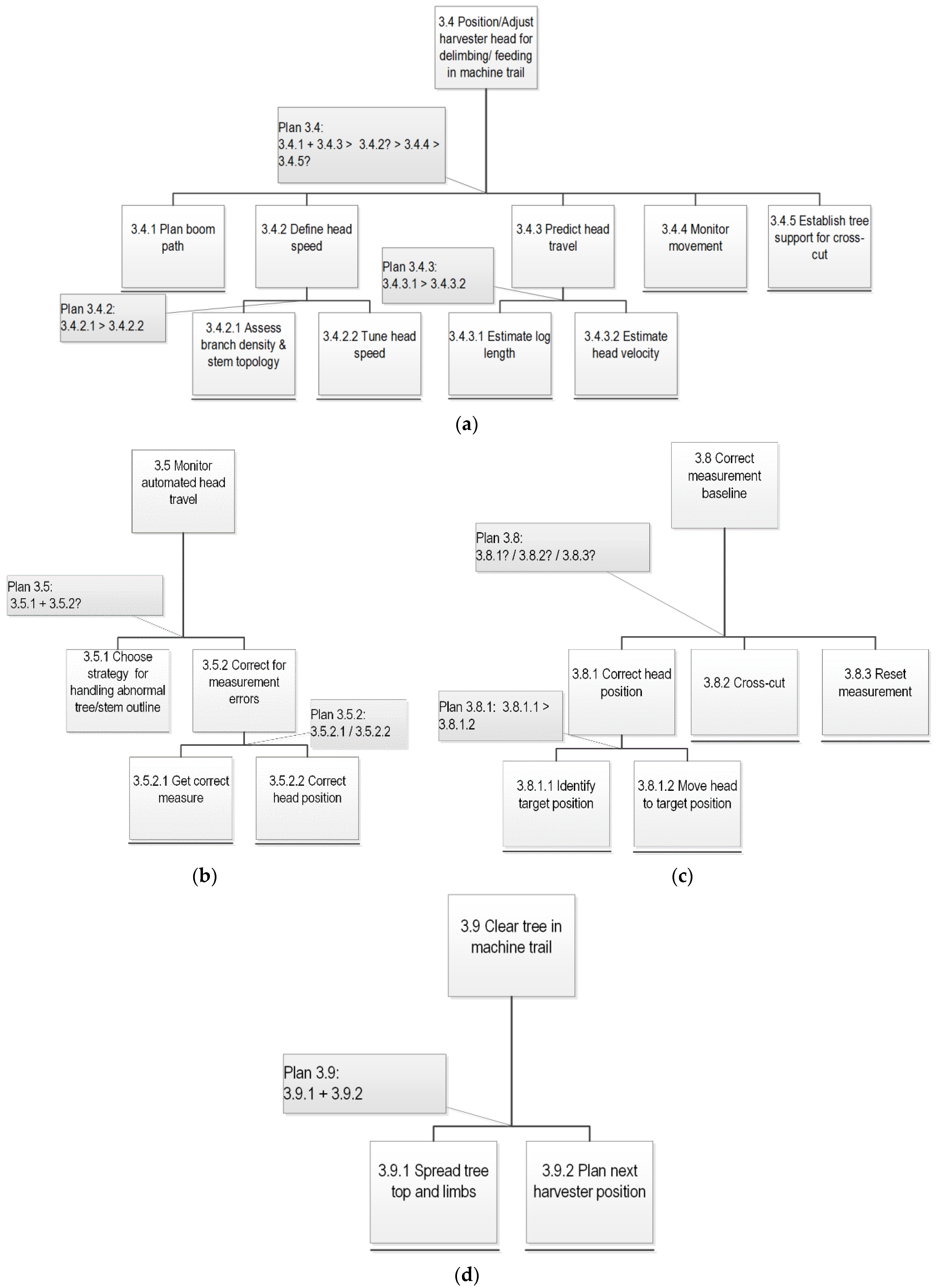
3.3. Differences between Work Methods
3.4. HTA to Contrast Effiecient and Inefficient Work Methods for Training Design
3.4.1. Efficient and Inefficient Work Practices
3.4.2. Training Concepts and Exercise Design
4. Discussion
Limitations
5. Conclusions and Future Perspectives
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A




References
- Dvořák, J.; Malkovský, Z.; Macků, J. Influence of Human Factor on the Time of Work Stages of Harvesters and Crane-Equipped Forwarders. J. For. Sci. 2008, 54, 24–30. [Google Scholar] [CrossRef] [Green Version]
- Ovaskainen, H.; Uusitalo, J.; Väätäinen, K. Characteristics and Significance of a Harvester Operators’ Working Technique in Thinnings. Int. J. For. Eng. 2004, 15, 67–77. [Google Scholar] [CrossRef]
- Sirén, M. Tree Damage in Single-Grip Harvester Thinning Operations. J. For. Eng. 2001, 12, 29–38. [Google Scholar]
- Purfürst, T.; Lindroos, O. The Correlation between Long-Term Productivity and Short-Term Performance Ratings of Harvester Operators. Croat. J. For. Eng. 2011, 32, 509–519. [Google Scholar]
- Pagnussat, M.; Hauge, T.; da Silva, L.E.; Martins de Almeida, R.M.; Naldony, A. Bimanual Motor Skill in Recruitment of Forest Harvest Machine Operators. Croat. J. For. Eng. (Online) 2020, 41, 25–33. [Google Scholar] [CrossRef]
- Hodgkinson, G.P.; Crawshaw, C.M. Hierarchical Task Analysis for Ergonomics Research. Appl. Ergon. 1985, 16, 289–299. [Google Scholar] [CrossRef] [PubMed]
- Annett, J. Training for Perceptual Skills. Ergonomics 1966, 9, 459–468. [Google Scholar] [CrossRef] [PubMed]
- Annett, J. Hierarchical Task Analysis. In Handbook of Cognitive Task Design; Erlbaum Mahwah; CRC Press: Boca Raton, FL, USA, 2003; pp. 17–35. [Google Scholar]
- Shepherd, A. HTA as a Framework for Task Analysis. Ergonomics 1998, 41, 1537–1552. [Google Scholar] [CrossRef]
- Kassner, A.; Baumann, M.; Weber, L. A Hierarchical Task Analysis of Merging onto a Freeway—Comparison of Driver’s and Driver Model’s Task Representation. In Human Modelling in Assisted Transportation; Cacciabue, P.C., Hjälmdahl, M., Luedtke, A., Riccioli, C., Eds.; Springer: Milan, Italy, 2011; pp. 291–298. ISBN 978-88-470-1820-4. [Google Scholar]
- Proctor, R.W.; Dunston, P.S.; So, J.C.Y.; Wang, X. Task Analysis for Improving Training of Construction Equipment Operators. In Proceedings of the Construction Research Congress 2012; American Society of Civil Engineers: West Lafayette, IN, USA, 2012; pp. 169–178. [Google Scholar]
- Stanton, N.A. Hierarchical Task Analysis: Developments, Applications, and Extensions. Appl. Ergon. 2006, 37, 55–79. [Google Scholar] [CrossRef] [Green Version]
- Shepherd, A. An Improved Tabular Format for Task Analysis. J. Occup. Psychol. 1976, 49, 93–104. [Google Scholar] [CrossRef]
- Richardson, J.; Ormerod, T.C.; Shepherd, A. The Role of Task Analysis in Capturing Requirements for Interface Design. Interact. Comput. 1998, 9, 367–384. [Google Scholar] [CrossRef]
- Carlisle, K.E. The Process of Task Analysis: Integrating Training’s Multiple Methods. J. Instr. Dev. 1983, 6, 31–35. [Google Scholar] [CrossRef]
- Hiesl, P.; Benjamin, J.G. Estimating Processing Times of Harvesters in Thinning Operations in Maine. For. Prod. J. 2015, 65, 180–186. [Google Scholar] [CrossRef]
- Moskalik, T.; Borz, S.A.; Dvořák, J.; Ferencik, M.; Glushkov, S.; Muiste, P.; Lazdiņš, A.; Styranivsky, O. Timber Harvesting Methods in Eastern European Countries: A Review. Croat. J. For. Eng. 2017, 38, 231–241. [Google Scholar]
- Hartsch, F.; Dreger, F.A.; Englund, M.; Hoffart, E.; Rinkenauer, G.; Wagner, T.; Jaeger, D. Positive and Negative Work Practices of Forest Machine Operators: Interviews and Literature Analysis. Forests 2022, 13, 2153. [Google Scholar] [CrossRef]
- Cunningham, H.A. Aiming Error under Transformed Spatial Mappings Suggests a Structure for Visual-Motor Maps. J. Exp. Psychol. Hum. Percept. Perform. 1989, 15, 493–506. [Google Scholar] [CrossRef]
- So, J.C.Y.; Proctor, R.W.; Dunston, P.S. Impact of Interrupting Simulated Hydraulic Excavator Training with Simulated Loader Training. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2012, 56, 2482–2486. [Google Scholar] [CrossRef]
- Shepherd, A. Hierarchical Task Analysis and Training Decisions. PLET Program. Learn. Educ. Technol. 1985, 22, 162–176. [Google Scholar] [CrossRef]
- Kirwan, B.; Ainsworth, L.K. A Guide to Task Analysis, 1st ed.; CRC Press: London, UK, 1992. [Google Scholar]
- Diaper, D.; Stanton, N. (Eds.) The Handbook of Task Analysis for Human-Computer Interaction; CRC Press: Boca Raton, FL, USA, 2003; ISBN 978-0-429-22823-0. [Google Scholar]
- Salmon, P.; Jenkins, D.; Stanton, N.; Walker, G. Hierarchical Task Analysis vs. Cognitive Work Analysis: Comparison of Theory, Methodology and Contribution to System Design. Theor. Issues Ergon. Sci. 2010, 11, 504–531. [Google Scholar] [CrossRef]
- Nurminen, T.; Korpunen, H.; Uusitalo, J. Time Consumption Analysis of the Mechanized Cut-to-Length Harvesting System. Silva Fenn. 2006, 40, 334–363. [Google Scholar] [CrossRef] [Green Version]
- Palander, T.; Nuutinen, Y.; Kariniemi, A.; Väätäinen, K. Automatic Time Study Method for Recording Work Phase Times of Timber Harvesting. For. Sci. 2013, 59, 472–483. [Google Scholar] [CrossRef]
- Gellerstedt, S. Operation of the Single-Grip Harvester: Motor-Sensory and Cognitive Work. Int. J. For. Eng. 2002, 13, 35–47. [Google Scholar] [CrossRef]
- Eliasson, L.; Lageson, H. Simulation Study of a Single-Grip Harvester in Thinning from below and Thinning from above. Scand. J. For. Res. 1999, 14, 589–595. [Google Scholar] [CrossRef]
- Tervo, K.; Palmroth, L.; Koivo, H. Skill Evaluation of Human Operators in Partly Automated Mobile Working Machines. IEEE Trans. Automat. Sci. Eng. 2010, 7, 133–142. [Google Scholar] [CrossRef]
- Malinen, J.; Taskinen, J.; Tolppa, T. Productivity of Cut-to-Length Harvesting by Operators’ Age and Experience. Croat. J. For. Eng. 2018, 39, 14–22. [Google Scholar]
- Militello, L.G.; Hutton, R.J.B. Applied Cognitive Task Analysis (ACTA): A Practitioner’s Toolkit for Understanding Cognitive Task Demands. Ergonomics 1998, 41, 1618–1641. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sequence | Count | Work Element |
|---|---|---|
| 1 | 12 | moving |
| 2 | 8 | boom out |
| 3 | 18 | cut tree |
| 4 | 18 | process tree |
| 5 | 6 | non-productive time |
| 6 | 3 | piling logs |
| Demographic Data | Germany | Scandinavia |
|---|---|---|
| Sex (all male) | 7 | 8 |
| Age (years) | 40–57 | 29–61 |
| Years of experience on harvesters | 6–10 | 5–40 |
| Years of experience on forwarders | 1–25 | 1–40 |
| Currently operating forest machines [yes/no] | 6/1 | 7/1 |
| Years as forest machine operator instructor | 5–25 | 1–25 |
| Trained machine operators (count) | 40–300 | 25–3500 |
| + | dual/parallel operation |
| > | sequential activation, i.e., first subgoal 1, then 2; |
| / | either or subgoal is active |
| : | any subgoal is active; order and time are not critical |
| ? | subgoal is active if necessary/condition applies |
| Superordinate Task | Components and Description | Execution Plan | Cues (Enter/Exit Rules) | Notes and Remarks |
|---|---|---|---|---|
| 1. Position harvester | 1.1 Plan route 1.2 Drive harvester to target position 1.3 Decide trees to be kept | Plan 1: 1.3 > 1.1 > 1.2 1.2 > 1.2 | Upon start of the felling operation/End of felling operation | Route planning may depend on weather conditions |
| 2. Fell tree | 2.1 Grab tree 2.2 Fell-cut 2.3 Pre-strain stem | Plan 2: 1.? > 2.3? > 2.2 | Start felling/tree is felled | Pre-straining and grabbing depend on tree and terrain properties |
| 3. Process tree | 3.1 Decide pile position 3.2 Change species in board computer 3.3 Check tree damage/rot 3.4 Position/adjust harvester head for delimbing/feeding 3.5 Monitor automated head travel/cross-cut 3.6 Sort logs 3.7 Correct measurement baseline 3.8 Clear tree | Plan3: 3.1 > 3.2? + 3.3 > 3.4? > 3.5 > 3.6 > 3.7? > 3.8 | Start after tree is felled/tree is processed and aggregate is free of branches | The pile positions, depend on terrain and number of assortments |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dreger, F.A.; Englund, M.; Hartsch, F.; Wagner, T.; Jaeger, D.; Björheden, R.; Rinkenauer, G. Hierarchical Task Analysis (HTA) for Application Research on Operator Work Practices and the Design of Training and Support Systems for Forestry Harvester. Forests 2023, 14, 424. https://doi.org/10.3390/f14020424
Dreger FA, Englund M, Hartsch F, Wagner T, Jaeger D, Björheden R, Rinkenauer G. Hierarchical Task Analysis (HTA) for Application Research on Operator Work Practices and the Design of Training and Support Systems for Forestry Harvester. Forests. 2023; 14(2):424. https://doi.org/10.3390/f14020424
Chicago/Turabian StyleDreger, Felix A., Martin Englund, Florian Hartsch, Thilo Wagner, Dirk Jaeger, Rolf Björheden, and Gerhard Rinkenauer. 2023. "Hierarchical Task Analysis (HTA) for Application Research on Operator Work Practices and the Design of Training and Support Systems for Forestry Harvester" Forests 14, no. 2: 424. https://doi.org/10.3390/f14020424