
An Optimized SIFT-OCT Algorithm for Stitching Aerial Images of a Loblolly Pine Plantation
Abstract
:1. Introduction
2. Materials and Methods
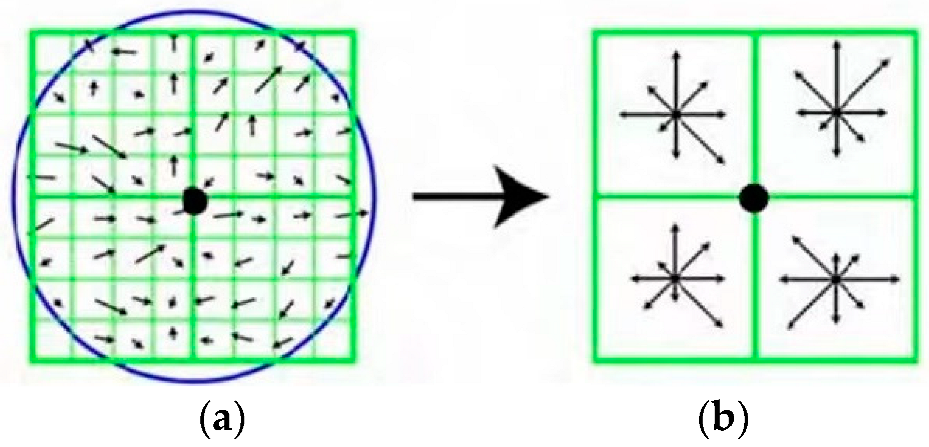
2.1. SIFT-OCT Algorithm Description
2.2. Improved SIFT-OCT Algorithms
2.2.1. Feature Point Matching Strategy Optimization
2.2.2. Feature Point Matching Pair Strategy Optimization
- First, a suitable model is chosen for the local points, and all unknown parameters of the model are obtained by calculation.
- Second, the model is used to test outlier points, and if the data for an outlier point also applies to the model, then that outlier point will also be converted to an inlier point.
- By analogy, if a sufficient number of extrinsic points are converted to intrinsic points, the model is deemed appropriate.
- Finally, estimation and error analysis of the model using all intra-local points to assess the accuracy of the model.
- The above process is repeated n times, and the model with a higher number of points in the bureau, and a higher accuracy rate is selected as the best model.
| Algorithm 1 Fast Sample Consensus (FSC) |
| Input: |
|
|
|
Output: the transformation model parameters
|
|
2.3. Assessment Criteria
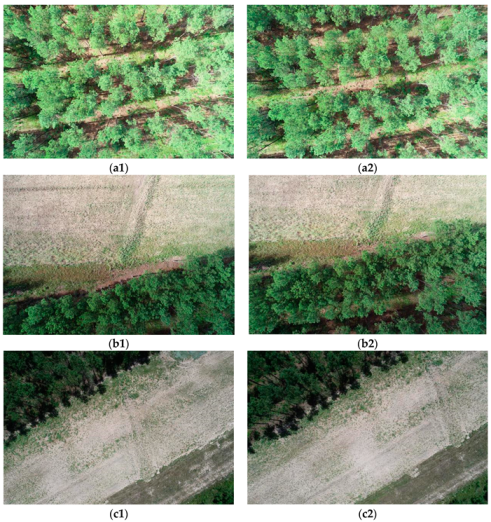
2.4. Materials
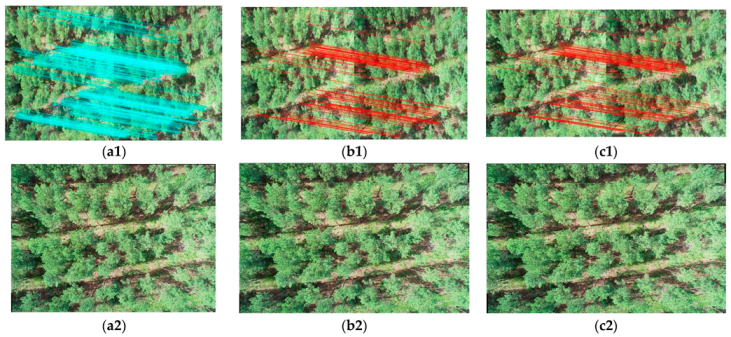
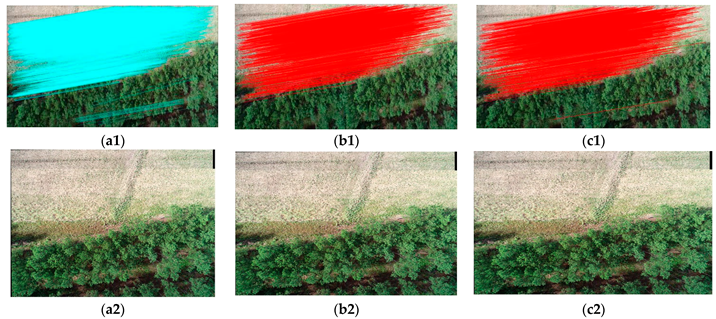
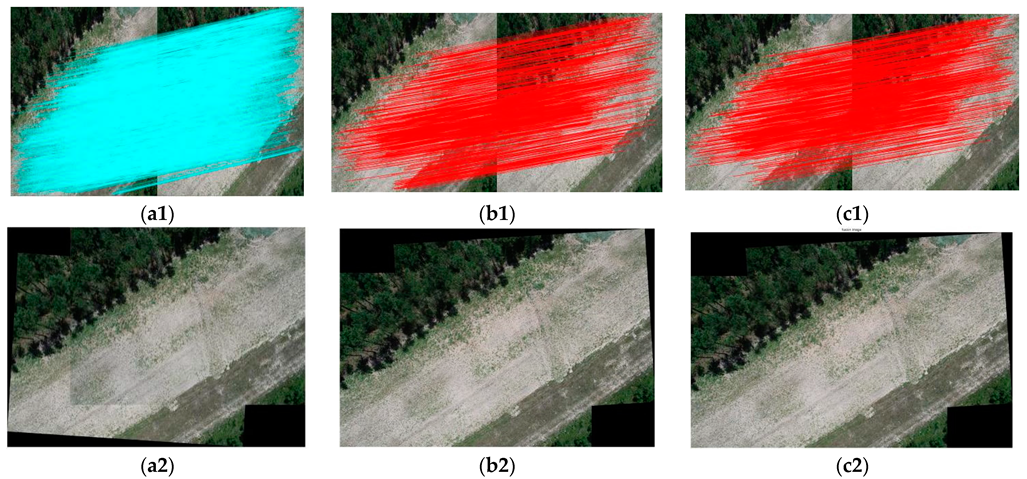
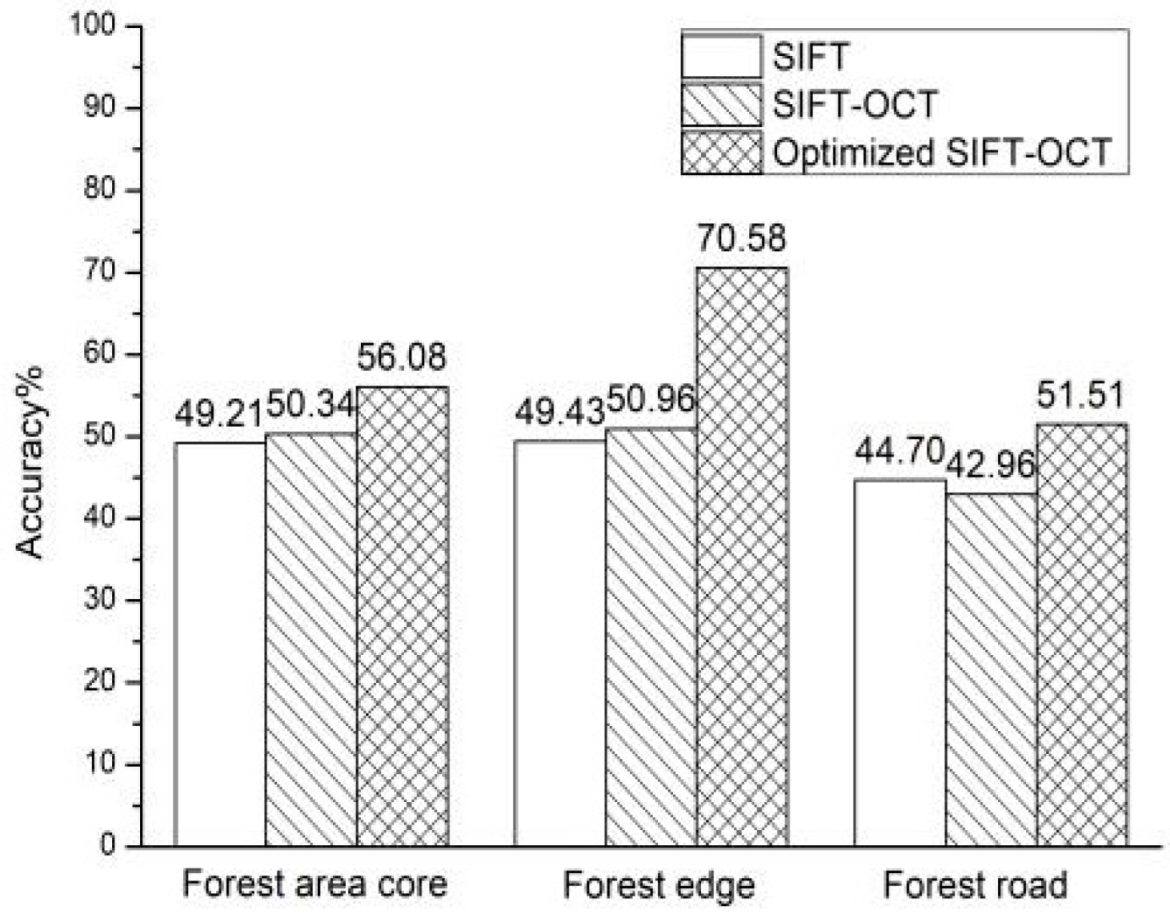
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fang, G.; Fang, L.; Yang, L.; Wu, D. Comparison of Variable Selection Methods among Dominant Tree Species in Different Regions on Forest Stock Volume Estimation. Forests 2022, 13, 787. [Google Scholar] [CrossRef]
- Morales-Hidalgo, D.; Oswalt, S.N.; Somanathan, E. Status and trends in global primary forest, protected areas, and areas designated for conservation of biodiversity from the Global Forest Resources Assessment 2015. For. Ecol. Manag. 2015, 352, 68–77. [Google Scholar] [CrossRef]
- Neykov, N.; Krišťáková, S.; Hajdúchová, I.; Sedliačiková, M.; Antov, P.; Giertliová, B. Economic efficiency of forest enterprises—Empirical study based on data envelopment analysis. Forests 2021, 12, 462. [Google Scholar] [CrossRef]
- Chen, W.; Hu, X.; Chen, W.; Hong, Y.; Yang, M. Airborne LiDAR remote sensing for individual tree forest inventory using trunk detection-aided mean shift clustering techniques. Remote Sens. 2018, 10, 1078. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, W.; Gao, R.; Jin, Z.; Wang, X. Recent advances in the application of deep learning methods to forestry. Wood Sci. Technol. 2021, 55, 1171–1202. [Google Scholar] [CrossRef]
- Liu, Z.; Peng, C.; Work, T.; Candau, J.N.; DesRochers, A.; Kneeshaw, D. Application of machine-learning methods in forest ecology: Recent progress and future challenges. Environ. Rev. 2018, 26, 339–350. [Google Scholar] [CrossRef]
- Çalışkan, E.; Sevim, Y. Forest road extraction from orthophoto images by convolutional neural networks. Geocarto Int. 2022, 1–15. [Google Scholar] [CrossRef]
- Lou, X.; Huang, Y.; Fang, L.; Huang, S.; Gao, H.; Yang, L.; Hung, I.K. Measuring loblolly pine crowns with drone imagery through deep learning. J. For. Res. 2022, 33, 227–238. [Google Scholar] [CrossRef]
- You, J.; Zhang, R.; Lee, J. A Deep Learning-Based Generalized System for Detecting Pine Wilt Disease Using RGB-Based UAV Images. Remote Sens. 2021, 14, 150. [Google Scholar] [CrossRef]
- Sheng, Y.; Gong, P.; Biging, G.S. True orthoimage production for forested areas from large-scale aerial photographs. Photogramm. Eng. Remote Sens. 2003, 69, 259–266. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, Z. Review on image-stitching techniques. Multimedia Syst. 2020, 26, 413–430. [Google Scholar] [CrossRef]
- Zitová, B.; Flusser, J. Image registration methods: A survey. Image Vis. Comput. 2003, 21, 977–1000. [Google Scholar] [CrossRef]
- Le Moigne, J. Introduction to remote sensing image registration. In Proceedings of the 2017 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Fort Worth, TX, USA, 23–28 July 2017; pp. 2565–2568. [Google Scholar]
- Cole-Rhodes, A.A.; Johnson, K.L.; Lemoigne, J.; Zavorin, I. Multiresolution registration of remote sensing imagery by optimization of mutual information using a stochastic gradient. IEEE Trans. Geosci. Remote Sens. 2003, 12, 1495–1511. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.S.; Guo, C.M. Research of correlation tracking algorithm based on correlation coefficient. J. Image Graph. 2004, 9, 963–967. (In Chinese) [Google Scholar]
- Xu, Y.; Yang, Y.; Lin, W. Research on image stitching effect of UAV forest region based on different stitching algorithms. For. Eng. 2020, 36, 50–59. (In Chinese) [Google Scholar]
- Ma, J.; Zhou, H.; Zhao, J.; Gao, Y.; Jiang, J.; Tian, J. Robust feature matching for remote sensing image registration via locally linear transforming. IEEE Trans. Geosci. Remote Sens. 2015, 53, 6469–6481. [Google Scholar] [CrossRef]
- Lowe, D.G. Object recognition from local scale-invariant features. In Proceedings of the IEEE International Conference on Computer Vision, Kerkyra, Greece, 20–27 September 1999. [Google Scholar]
- Ke, N.Y.; Sukthankar, R. PCA-SIFT: A more distinctive representation for local image descriptors. In Proceedings of the IEEE Computer Society Conference on Computer Vision & Pattern Recognition, Washington, DC, USA, 27 June–2 July 2004; Volume 2, p. II. [Google Scholar]
- Xiang, Y.; Wang, F.; You, H. Os-sift: A robust sift-like algorithm for high-resolution optical-to-sar image registration in suburban areas. IEEE Trans. Geosci. Remote Sens. 2018, 56, 3078–3090. [Google Scholar] [CrossRef]
- Ma, W.; Wen, Z.; Wu, Y.; Jiao, L.; Gong, M.; Zheng, Y.; Liu, L. Remote sensing image registration with modified sift and enhanced feature matching. IEEE Trans. Geosci. Remote Sens. 2016, 14, 3–7. [Google Scholar] [CrossRef]
- Ye, F.; Su, Y.; Hui, X.; Zhao, X.; Min, W. Remote sensing image registration using convolutional neural network features. IEEE Geosci. Remote Sens. Lett. 2018, 15, 232–236. [Google Scholar] [CrossRef]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the SIFT operator to geometric SAR image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Lindeberg, T. Scale-space theory: A basic tool for analyzing structures at different scales. J. Appl. Stat. 1994, 21, 225–270. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography—Sciencedirect. Read. Comput. Vis. 1987, 24, 381–395. [Google Scholar] [CrossRef]
- Wu, Y.; Ma, W.; Gong, M.; Su, L.; Jiao, L. A novel point-matching algorithm based on fast sample consensus for image registration. IEEE Geosci. Remote Sens. Lett. 2014, 12, 543–547. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image Pair | Algorithm | Number of Feature Points | Number of Matched Points | Number of Correct Points | Accuracy (%) | Splicing Time (s) | |
|---|---|---|---|---|---|---|---|
| Left | Right | ||||||
| Core a1/a2 | SIFT | 92,928 | 89,250 | 1764 | 868 | 49.21 | 1074.11 |
| SIFT-OCT | 15,689 | 15,346 | 147 | 74 | 50.34 | 308.08 | |
| Optimized SIFT-OCT | 15,689 | 15,346 | 148 | 83 | 56.08 | 74.42 | |
| Edge b1/b2 | SIFT | 84,521 | 86,386 | 18,444 | 9114 | 49.43 | 935.22 |
| SIFT-OCT | 9212 | 8370 | 1619 | 825 | 50.96 | 148.96 | |
| Optimized SIFT-OCT | 9212 | 8370 | 1628 | 1149 | 70.58 | 70.17 | |
| Road c1/c2 | SIFT | 81,054 | 80,193 | 7228 | 3231 | 44.70 | 858.17 |
| SIFT-OCT | 7307 | 7477 | 1313 | 564 | 42.96 | 110.39 | |
| Optimized SIFT-OCT | 7307 | 7477 | 1326 | 683 | 51.51 | 57.66 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Hung, I.-K.; Xu, H.; Yang, L.; Wang, Y.; Fang, L.; Lou, X. An Optimized SIFT-OCT Algorithm for Stitching Aerial Images of a Loblolly Pine Plantation. Forests 2022, 13, 1475. https://doi.org/10.3390/f13091475
Wu T, Hung I-K, Xu H, Yang L, Wang Y, Fang L, Lou X. An Optimized SIFT-OCT Algorithm for Stitching Aerial Images of a Loblolly Pine Plantation. Forests. 2022; 13(9):1475. https://doi.org/10.3390/f13091475
Chicago/Turabian StyleWu, Tao, I-Kuai Hung, Hao Xu, Laibang Yang, Yongzhong Wang, Luming Fang, and Xiongwei Lou. 2022. "An Optimized SIFT-OCT Algorithm for Stitching Aerial Images of a Loblolly Pine Plantation" Forests 13, no. 9: 1475. https://doi.org/10.3390/f13091475