1. Introduction
The changing climate with warmer, drier conditions is likely to increase the risk, timing, and severity of forest fires [
1]. A fight against the fires then will require increased effort, new solutions, or at least more solutions. Elimination of forest fires on any scale combines several phenomena. Firstly, sufficient forces and resources for its localization and liquidation. Secondly, the availability of the site and a sufficient extinguishing agent (water) in connection with the availability of water resources themselves. Not one area of this vicious circle cannot be prepared in advance. However, making the forest accessible with the preservation, revitalization and construction of the forest road network and water resources should be part of the construction of the forest [
2]. It is necessary to look at safety construction from the point of view that it is not just a question of designing and dimensioning machinery, but the creation of a comprehensive system of filling defined objectives. The task of designers who deal with technical (operational) parameters is to ensure the highest possible efficiency of the machine [
3,
4]. At present, there are many vehicles, specially designed or modified, to fight wildfires. They are mainly one-purpose machines [
5,
6,
7,
8,
9]. The key point is the need to transport water close to the nearest intervening fire brigade, as soon as possible. Then, the most appropriate solution, for forest fires, is the use of ordinary forest machinery. Forestry skidders provide high slope accessibility and workability in forest terrain. If they are equipped with firefighting accessories, especially without the need to intervene in the construction of the skidders, the time of liquidation of a forest fire can be shorter. However, it reduces the possibility to tune up the parameters of such a firefighting system. The firefighting adapter (
Figure 1) allows the transport of water into an area of fire when connected to the forestry skidder. Based on the field conditions of forests and the available technology, it can be stated that the construction of the adapter is a new solution for the liquidation of forest fires in difficult forest conditions [
10]. Its essential feature is a big water tank placed far beyond the rear axle, on a rear shield. This solution does not intervene in the construction of the skidder. However, the big tank has a big influence on stability. The research of stability herein proposed is inspired by this innovative design of the firefighting adapter [
10]. The adapter with a 2000 L water tank (
Figure 1) is attached to the forest skidder LKT-81T. The water tank can be filled with water repeatedly, after its final placement in a place accessible from a wildfire area, using a helicopter equipped with a Bambi bucket. From a firefighting point of view, the bigger tank, the better tank, however the bigger tank behind the rear axle, the bigger influence on stability. In general, a big tank in the rear part can be equilibrated with a ballast weight in the front part. The purpose of this study is to investigate such a vehicle from point of view of static stability.
Many methods have been proposed to solve static stability. They include various types of machines equipped with front/rear axle pivot joints and/or articulated frames and/or using a stability triangle and/or similar computational methods to solve the static stability of a vehicle. Research of the firefighting adapter [
10] contains no stability analysis. In addition, the solution is quite specific. However, the physical principles and methods, usable for the solution of stability, are valid for all vehicles. Gibson [
11] performed research on the side slope stability of articulated-frame logging tractors. He defined also a stability triangle and the center-of-gravities locations as approximations. Franceschetti [
12] focused on the lateral stability performance of articulated narrow-track tractors. He used an inclined plane, also for an articulated tractor. Sierzputowski [
13] used an inclined plane platform to measure the rollover stability of an articulated vehicle, and noted that theoretically, for the complete assessment of the vehicle rollover stability, the critical slope angles should be measured at all the angular orientations of the platform. Bołoz [
14] investigated the stability of articulated drilling rigs. He created a mathematical model of the rig with a global coordinate system fixed to the front frame. Tomašić [
15] measured the distribution of forces during uphill and downhill timber skidding at various slope angles. Bietresato and Mazzetto [
16,
17,
18] created a tiltable plane/platform, as a wide flat structure (15 × 15 m), able to simulate different slope angles, allowing a vehicle to maneuver/travel on it along circular paths in a controlled and safe environment. For static tests, they used a turntable inserted in the lower half-platform. It allows testing a vehicle’s stability in all the orientations on the inclined plane. Majdan [
19] measured the position of the center of gravity of a small agricultural tractor, and performed a calculation of static overturning angle, according to ISO 16231-2. Mazzetto [
20] investigated the kinematics of an articulated tractor with a central joint (2 degrees of freedom) using an application written in Matlab. Demšar [
21] created a mathematical model and numerical simulation of the static stability of an agricultural tractor.
These researches and methods use similar principles to solve the static stability of a vehicle on a slope. However, if a vehicle is required to carry two or more loads in general positions, the methods above are not directly usable. It is a reason why the research method herein proposed has been developed. The method displays all the possible ranges of an articulation of the frame, and positions/rotations of the skidder on an inclined plane as a function of two independent variables, and displays them in form of a heatmap.
2. Materials and Methods
The firefighting adapter can be attached to the LKT-81 skidder (
Figure 1). It was used in the research because it is frequently used and available in Slovakia. However, this machine is not manufactured at present. Thus, it will not be used as a base machine for the adapter in the future. This is why the LKT-81 skidder was not used directly for analyses of stability, but a simplified alternative skidder model with similar parameters (
Table 1) was used. This simplification includes approximated positions of FG, and RG points (centers of gravities), placed on the centerline. The main goal of this research is to compare various configurations (
Table 2) of the water tank and additional front ballast weight, and not to evaluate an individual configuration, joined with the real (LKT-81) skidder. On a real vehicle, the FG and RG points are not placed exactly on the centerline but have a certain offset (in mm) from the centerline.
A method used to evaluate the stability is based on a physical principle, that says that a body/vehicle is statically stable if a gravity vector placed in a center of gravity stays inside of a stability polygon/triangle. The stability triangle is composed of tipping lines a vehicle overturns around when losing its stability. Then, the solution is to create lines of a stability triangle and a gravity vector in form of equations of spatial lines. Then, the distances of the gravity vector to the lines of the stability triangle determine the stability of the vehicle, in the purest form. Subsequently, a test of whether the gravity vector stays inside the stability triangle is necessary, to check unstable positions. Then the results can be visualized in plots for all the sides of the stability triangle. The solution based on vectors and a general programming language provides a possibility to make the solution universal. Then, it is possible to modify it in the future for different types of machines. The solution the stability has been implemented in Python programming language in a 3-dimensional space. Important points of the skidder then have three coordinates in the local coordinate system (
Figure 2).
The stability triangle is created by lines (
,
,
) as shown on
Figure 3. The gravity vector is placed in the center of gravity marked T. It is also represented as a line that we used to compute distances to the lines of the stability triangle.
Fully 3D equations of lines in vector form were used, as follows:
where:
—a point on a line (e.g., start point),
—another point on a line (e.g., end point),
t—a parameter describing a particular point on a line,
—directional vector of a line.
Distances between lines, mainly between the gravity vector and tipping lines of the stability triangle (
Figure 3) were determined using Equation [
22]:
where:
; ;
; ;
; ;
and
—are
coordinates of an end point of the first line (see Equation (
1))
—are coordinates of an end point of the second line
—are coordinates of a start point of the first line
—are coordinates of a start point of the second line
However, distances computed using Equation (
2) are always positive. That is why the crossing number algorithm was implemented to detect stable or unstable positions of the skidder. It says that if a point is on the outside of the polygon, the ray from the point in any fixed direction will intersect its edge an even number of times. An odd result means the point is on the inside of the polygon.
Equation (
2) needs to know position T of the gravity vector (
Figure 3). It is computed from weights and gravity vectors positions of the front and rear frames of the skidder (FG, RG, see
Figure 3) and mount points for additional weights/loads (FAW, RAW, see
Figure 3). All the gravity vectors create a list. The procedure for getting the final gravity vector position T is as follows:
- (1)
Remove two vectors from the list, and combine them into one vector;
- (2)
Inserted the vector into the list;
- (3)
Repeat if the list contains more than one vector;
- (4)
The last vector is the final gravity vector T.
Equations (
1) and (
2) require following input parameters:
Positions of FRW, FLW (front wheels) points and loads (FAW and/or RAW) that are not applied (
Figure 2 and
Figure 3) are not mandatory. Equation (
2) computes stability for one skidder’s position on a slope. To obtain complex information on static stability the computations were solved in a loop in two modes with different input values:
Input values for 1st mode:
Slope angle is a constant;
Frame’s articulation is variable in interval of ;
Skidder’s rotation on a slope is variable in interval of .
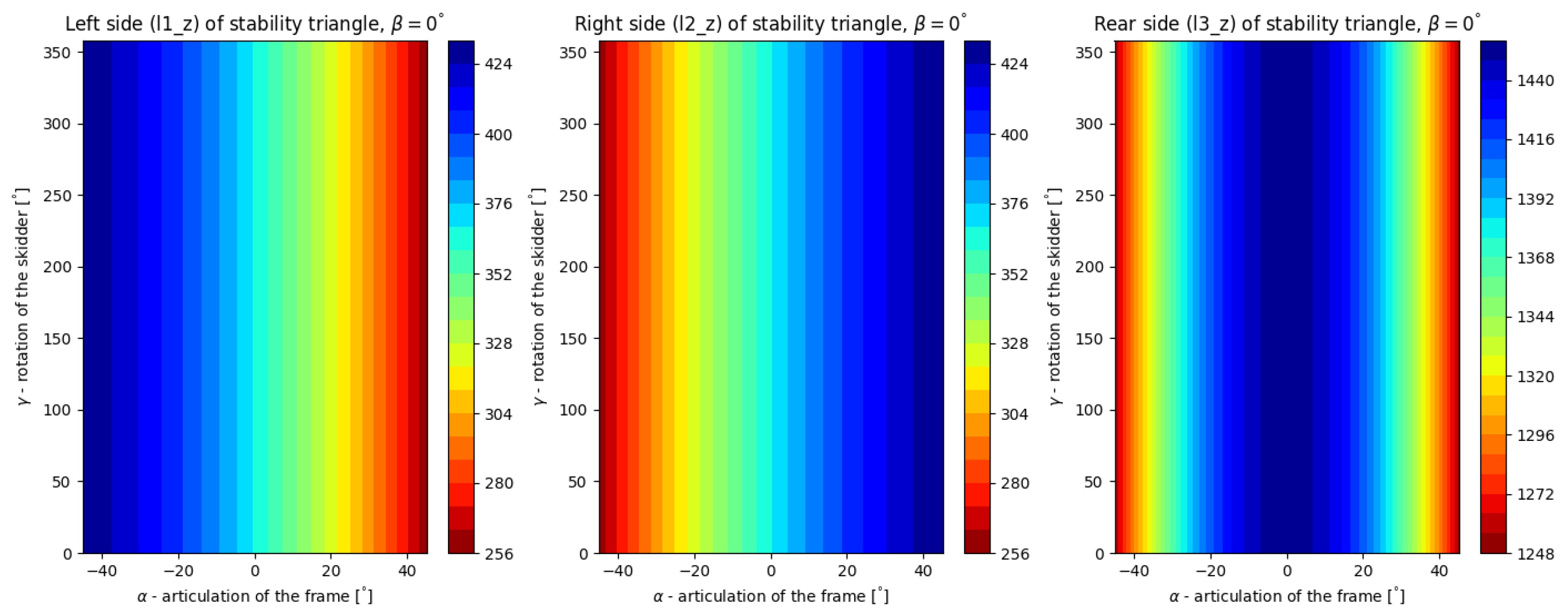
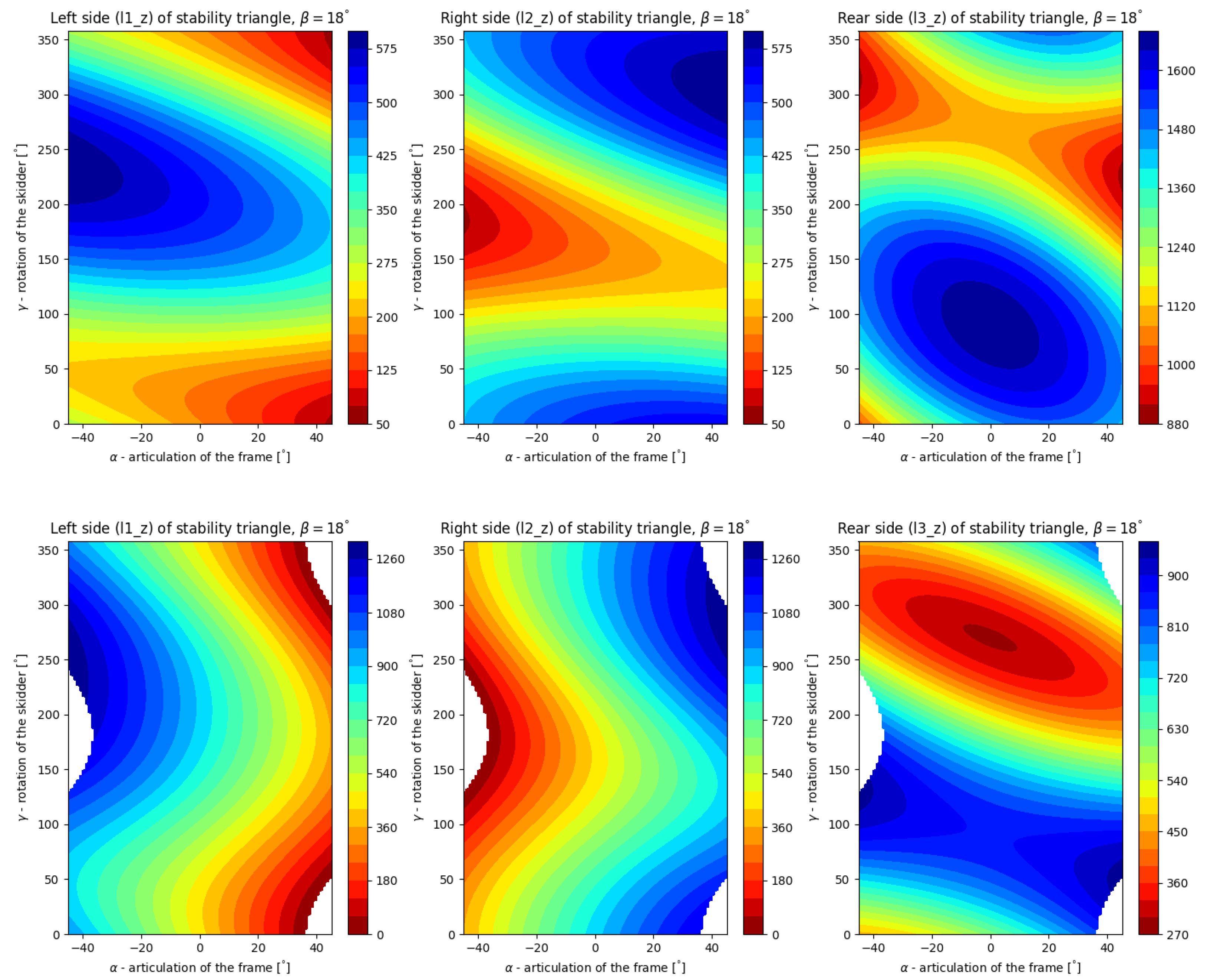
Input values for 2nd mode:
Frame’s articulation is a constant;
Slope angle is variable in interval of ;
Skidder’s rotation on a slope is variable in interval of .
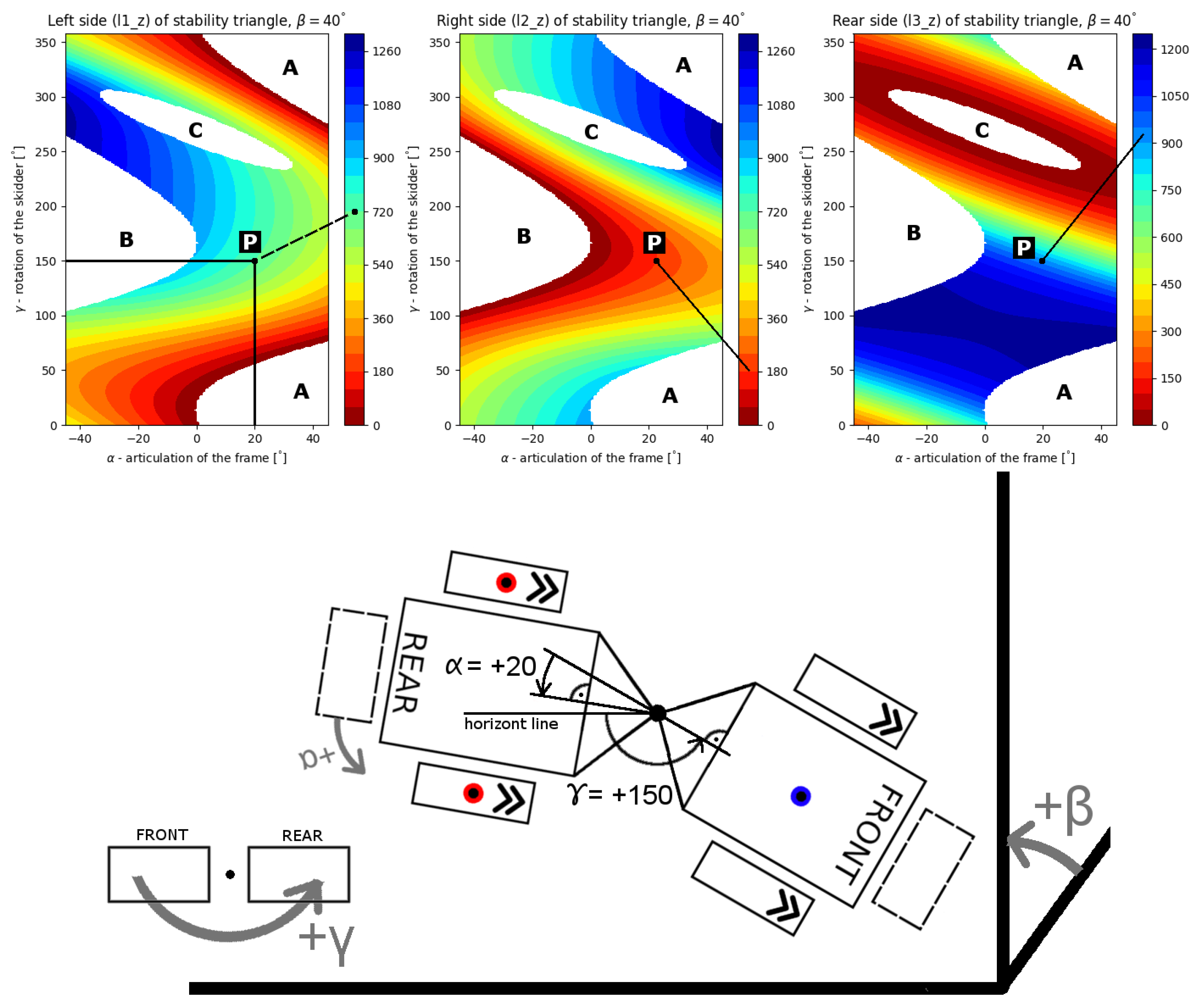
The first mode can evaluate the static stability of a firefighting device configuration on a predefined slope, considering maneuvers, i.e., rotations/positions on the slope. Thus, it is possible to evaluate an influence of a combination of a frame articulation
and rotation
of a firefighting device configuration on stability, as a distance of a gravity vector to a tipping line. In general, wheeled skidders should not operate on slopes that exceed
. It is, of course, a function of load size. For a skidder with a 3-tonne load, it is between
(downhill) and
, a skidder with a 4-tonne load between
and
and skidder with 5-tonne load between
and
[
23]. The maximum load size of the firefighting adapter is 3188 kg. Considering the position of the water tank the angle of
(
) has been used. This angle was used for the analyses in the first mode, where a slope angle
is a constant. The second mode allows to set up a constant angle of articulation of a frame and investigates its influence on stability if needed. Or it allows determining a maximal slope angle for a given combination of input parameters. Both the modes, require two variable input parameters, and provide three outputs, as shown in
Figure 4 (1st mode) and
Figure 5 (2nd mode). A Python matplotlib.pyplot library had been used to display results for both the modes using a
contourf plot.
As mentioned above, a point on a plot displays just one position of the machine. The position of the machine expressed by point P in
Figure 4 is shown under the plot. To get this position, the skidder was placed to the default position (front part facing toward 9 o’clock, on a contour line, as shown in
Figure 3), then rotated (
= 0) by the angle of
, then the rear frame was articulated by the angle of
.
4. Discussion
The performed analyses of static stability utilized a simplified alternative skidder model, derived from the LKT-81 forestry skidder. The positions of FG and RG points were approximated and placed on the centerline. This allows for creating comparisons between configurations only. In the case of the use of the real skidder data, for the analyses above, the results could reflect the real stability of the real firefighting adapter. However, it requires the skidder’s CAD (Autodesk Inventor, Solidworks, Catia, Creo Parametrics, etc.) model (that is available for the manufacturer only. It is not valid for the LKT-81, because it was designed before CAD era.), or physical measurements of the skidder. If the model is available, the positions of FG and RG points can be computed. Another possibility is to measure them. It is possible with lifting and tilting tests. Then, the center of gravity can be computed. In comparison with a non-articulated vehicle [
24], the measurements may include articulated positions of the skidder.
The firefighting adapter based on the skidder with front axle oscillation and the articulated frame was investigated in five configurations/combinations of front and rear loads. The solution of determination of static stability herein described and applied, provides a complete display of stability for each configuration and range of variable parameters, using one plot per tipping line. The results showed, that a rear load, in form of the water tank, decreases longitudinal stability. However, it also improves lateral stability. That is a positive result. The negative one is that better lateral stability contains also areas of instability. Better longitudinal stability can be achieved with a front-load however it can decrease lateral stability. However, the firefighting skidder device is not intended for motion on steep slopes in a contour line direction. In general, there is a possibility to use a bigger tank and a bigger front ballast weight and equilibrate them to achieve the same result, as herein presented. That is the static solution. In the case of a motion in a real forest, a terrain micro-relief should be taken into account. It contains obstacles that can dynamically change an instant position of the adapter, and create dynamic forces. Future research could be focused on their influence on stability. Comparison plots then can display differences in stability, point-by-point.
If the stability and solution of the firefighting adapter are compared with other solutions (in references), the result has some benefits and disadvantages. The adapter is cheaper than a one-purpose vehicle and can be prepared and stored on a forest owner’s site. In case of need, it can be employed and transported to a place accessible from a wildfire area using an ordinary forestry skidder, used every day in logging operations. The water tank then provides a renewable resource of water for firefighting operations in a place where the water is missing and needed. The disadvantages of the solution are worse stability and a smaller volume of the tank. Both disadvantages are partially equilibrated with the high terrain accessibility of a forestry skidder. The water tank in a right place can improve and simplify the liquidation of forest fires. It is possible to imagine that the tank can also be filled with water by unmanned aerial vehicles. However, future perspectives are based on future firefighting ways.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}