
The Potential of Low-Cost 3D Imaging Technologies for Forestry Applications: Setting a Research Agenda for Low-Cost Remote Sensing Inventory Tasks


Abstract
:1. Introduction
- (1)
- Provide an overview of CRP and RGB-D remote sensing technologies, summarising their principles of operation, and their benefits and limitations within the context of forest inventory capture;
- (2)
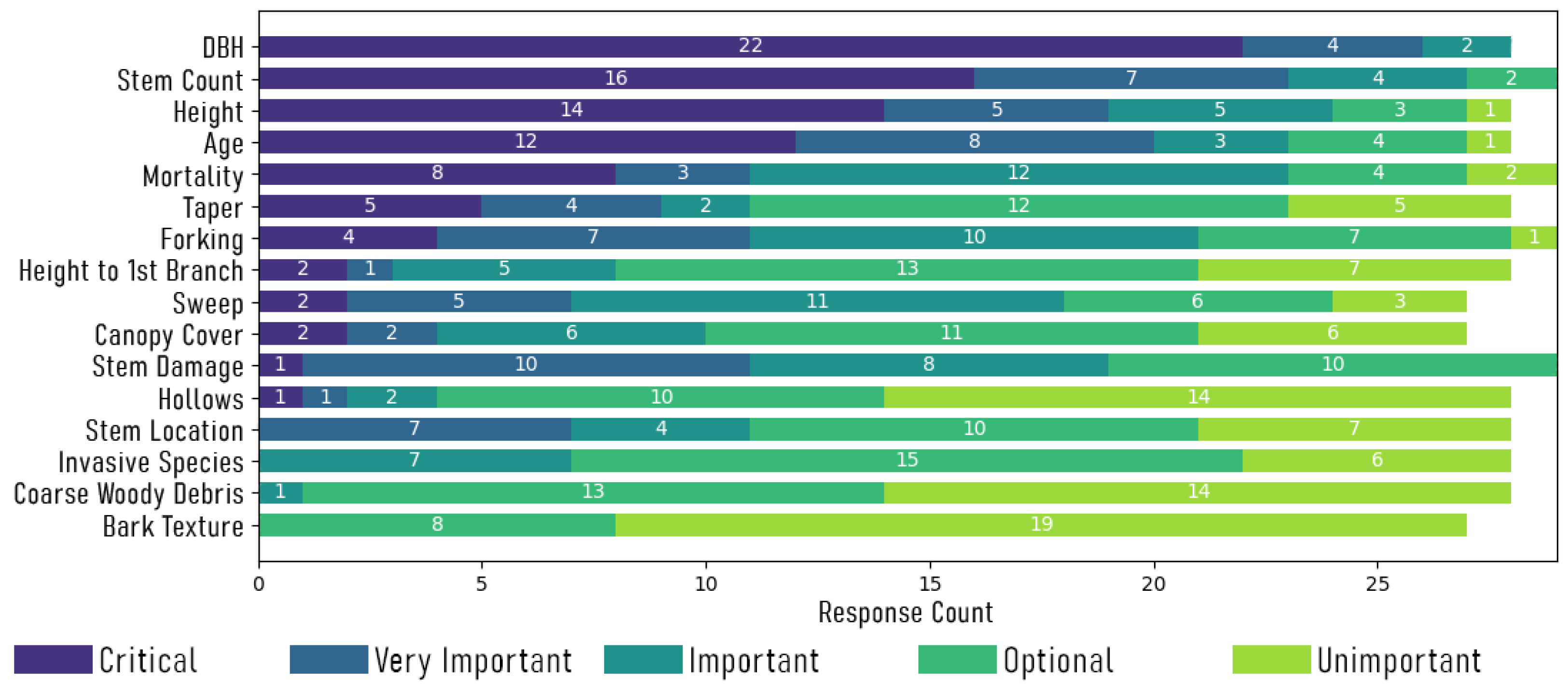
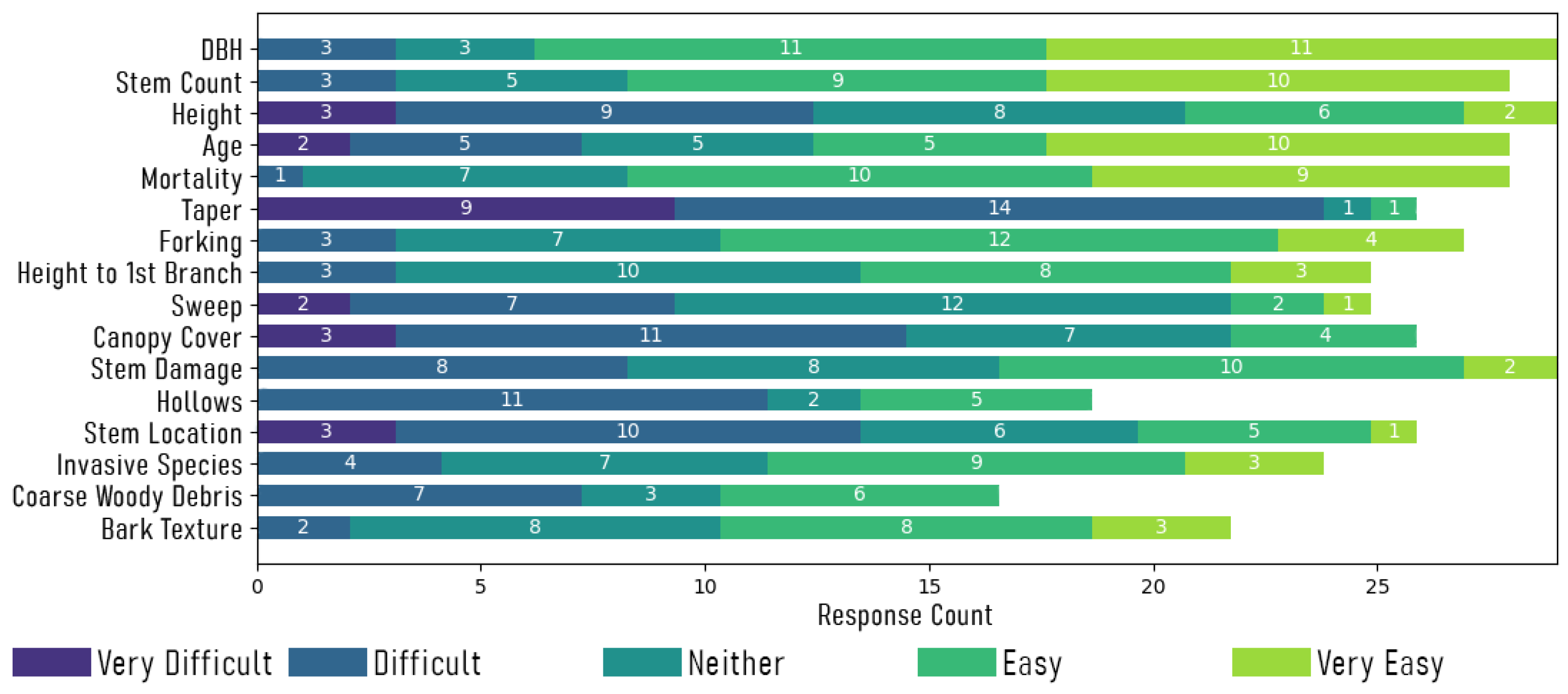
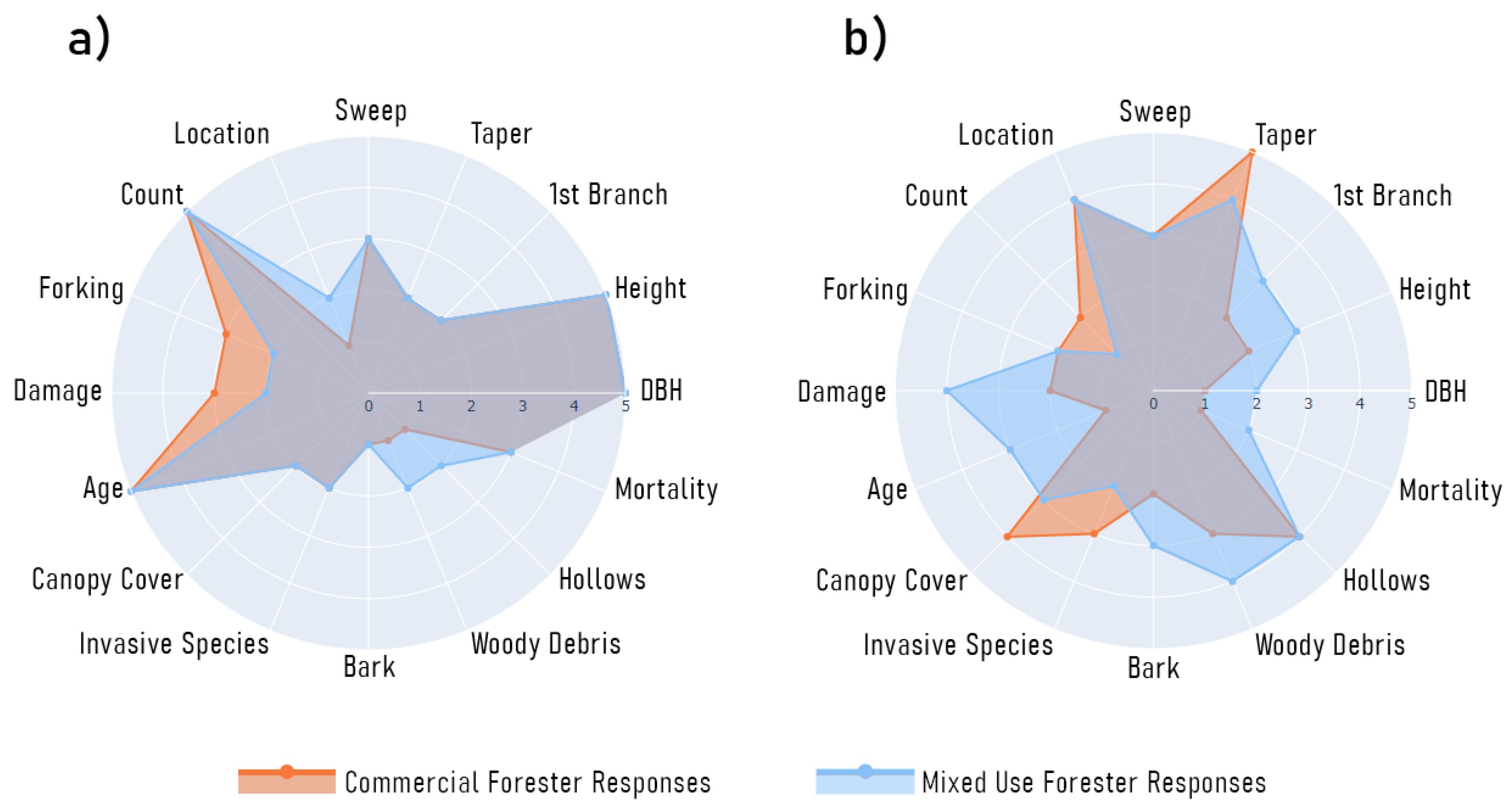
- Report the results of a survey completed by forestry practitioners pertaining to the importance of common forest inventory measurements, the complexity of capturing these inventory measurements with conventional methods, and the opportunities provided by low-cost RS technologies when conducting forest inventory tasks; and
- (3)
- Review how terrestrial low-cost sensors have been used to derive forest inventory metrics in the recent literature.
2. Background
2.1. Close-Range Photogrammetry
2.2. Low-Cost Depth Sensors
2.2.1. Time-of-Flight RGB-D Systems
2.2.2. Triangulation RGB-D Systems
Passive Stereo
Active Stereo
Structured Light
2.2.3. Summary
3. Method
3.1. Literature Review for the Application of Low-Cost Terrestrial Sensors for Forest Inventory
3.2. Forest Inventory Metrics Survey
4. Results
4.1. Literature Review for the Application of Low-Cost Terrestrial Sensors for Forest Inventory Capture
4.1.1. Terrestrial Close Range Photogrammetry Literature Analysis
4.1.2. Terrestrial Low-Cost Depth Sensor Literature Analysis

{kind=link}
{kind=link}
{kind=link}
| Reference | Capture Technology | Sensor Name | Capture Method | Inventory Metrics | Number of Stems |
|---|---|---|---|---|---|
| Akpo et al. [57] | CRP | Canon 77D | Complete Stem View | PBH | 30 |
| McGlade et al. [47] | ToF RGB-D | Microsoft Azure Kinect | Partial Stem View | DBH | 51 |
| Mokroš et al. [58] | CRP | Canon 70D (Fisheye Lens) | Complete Stem View | DBH PBH Stem Diameter (0.8 m, 1.8 m) Stem Circumference (0.8 m, 1.8 m) | 40 |
| Akpo et al. [39] | CRP | Canon 77D | Complete Stem View | PBH Bole Volume | 30 |
| Mulverhill et al. [54] | Stereo CRP | RICOH Theta S (Fisheye Lens) | Complete Stem View | DBH Stem Diameter (0.8 m, 1.8 m) Volume | 15 |
| Fan et al. [44] * | ToF RGBD | Google Tango | Partial Stem View | DBH Stem Height | 193 |
| Mokroš et al. [70] | CRP | Canon 70D (Fisheye Lens) | Complete Stem View | DBH Stem Diameter (0.8 m, 1.8 m) | 40 |
| Hyyppä et al. [42] | ToF RGB-D SL RGB-D | Google Tango Microsoft Kinect V1 | Complete Stem View (ToF) Partial Stem View (SL) | DBH Stem Taper | 240 (ToF) 41 (SL) |
| Bauwens et al. [56] | CRP | Nikon D90 | Complete Stem View | DBH | 46 |
| Fang and Strimbu [10] | CRP | Nikon D3200 | Complete Stem View | DBH Stem Taper | 18 |
| Surovỳ et al. [59] | CRP | Sony NEX 7 | Complete Stem View | DBH PBH | 20 |
| Reference | Capture Technology | Sensor Name | Capture Method | Inventory Metrics | Number of Stems |
|---|---|---|---|---|---|
| Mokroš et al. [55] * | ToF RGB-D Stereo CRP | Apple iPad LiDAR Sony A6300 | Mobile Mobile | DBH Stem Detection | 268 |
| Gollob et al. [68] * | ToF RGB-D | Apple iPad LiDAR | Mobile | DBH Stem Detection | 424 |
| Bayati et al. [66] | CRP | Nikon D5500 | Stop-and-Go | DBH Stem Height Stem Detection | 35 |
| Fan et al. [69] * | ToF RGB-D | Google Tango | Mobile | Stem Detection | 334 |
| Hunčaga et al. [65] | CRP | Canon EOS 5D MkII | Stop-and-Go | DBH Stem Taper (0.3 m–8 m) | 43 |
| Marzulli et al. [67] | CRP | Samsung Galaxy S6 | Stop-and-Go | DBH Stem Volume | 45 (DBH) 15 (Volume) |
| Piermattei et al. [32] | CRP | Nikon D800 | Stop-and-Go | DBH Stem Taper (<0.65 m) Stem Detection | 307 |
| Fan et al. [44] * | ToF RGB-D | Google Tango | Mobile | Stem Detection | 193 |
| Mokroš et al. [62] | CRP | Canon EOS 5D MkII | Stop-and-Go Mobile | DBH Stem Detection | 67 |
| Berveglieri et al. [61] | CRP | Nikon D3100 (Fisheye Lens) | Plot Centre Nadir Capture | DBH Stem Detection | 7 |
| Tomaštík et al. [43] | ToF RGB-D CRP | Google Tango Canon EOS 5D MKII | Mobile Stop-and-Go | DBH Stem Detection | 118 |
| Forsman et al. [40] | Stereo CRP | Canon 7D Canon 40D | Plot Centre Stop-and-Go | DBH Stem Detection | 160 |
4.2. Forest Inventory Metrics Survey Results
5. Discussion
Future Research Directions for Low-Cost RS Technologies
- Stand-alone RGB-D sensors—those not combined into another device as a peripheral sensor—require the development of integration solutions to allow for their deployment within a forestry setting. Currently, integrated solutions, such as the Apple iPad, allow for their use by untrained personnel right out of the box and therefore are more likely to be used. However, there may potentially be more appropriate stand-alone RGB-D sensors available, providing improved capture solutions within forest environments. Through the integration of a power supply, processor and data storage, RGB-D sensors that offer greater control over data acquisition methods and access to raw depth images may be calibrated for, and deployed in, forestry environments. These integration systems could be designed to operate in a similar manner to handheld PLS, or may be designed as a low-cost wearable that can capture information while other inventory tasks are being conducted.
- One of the main benefits of low-cost RS data acquisition approaches utilising RGB-D sensors, as opposed to CRP, is the speed of point-cloud registration and processing through the use of SLAM algorithms. Although SLAM algorithms have been designed specifically for low-cost RGB-D sensors, in addition to sensor-specific algorithms, these sensors’ tracking and co-registration processes are designed for use under optimal sensor capture conditions, commonly indoor environments. Through the design of SLAM algorithms optimised for use within forestry environments, the potential error introduced through misalignment and positional errors may be reduced. This is particularly important if fine vegetation features are to be accurately captured. Such algorithms should focus on feature detection algorithms that perform well in environments with homogeneous features, colours and textures, as well as potentially dim lighting.
- Although different RGB-D sensors may operate using the same depth-sensing technology, due to differences in components that make up an RGB-D device–such as camera resolution, baseline distance and IMU accuracy–performance between different sensors can vary. This effect is further increased when considering the influence of SLAM algorithms when co-aligning depth frames, something that cannot be avoided when using some depth sensors integrated into other technologies that limit control over capture procedures. Lastly, when assessing the performance of a sensor to capture 3D information in a forestry environment, the structural complexity and composition of vegetation elements can add an additional layer of difficulty to the process. Therefore, there is a need for a standardised, sensor-agnostic assessment framework that can be used to determine the measurement accuracy of different low-cost technologies when capturing 3D information in different forestry environments. Such a framework would be used to aid in the selection of the optimal sensors for application in different levels of forest structural complexity.
- Due to the limited range of active RGB-D sensors, and to an extent of terrestrial SfM CRP approaches and PS RGB-D sensors, there is the potential to design a multi-platform sensor approach for increased plot coverage utilising consumer-grade UAV SfM, while still operating at a low-cost. Access to DAP, for example, can provide access to inventory metrics not captured by terrestrial sensors, such a stem height, and provide complimentary information to capture metrics such as sweep and taper. Therefore, the question of how these low-cost approaches can be integrated needs to be investigated. Through the further implementation of aerial photography and satellite imagery, this full plot coverage may then potentially be scaled to inform decision-making over larger forest areas.
- Continued exploration of low-cost technologies as they emerge. Systems such as stand-alone solid-state Puck LiDAR units, similar to those integrated into PLS devices, and available for USD 1000, may potentially be integrated with an IMU, power supply, data storage and CPU to provide solutions similar to integrated RGB-D devices but with a higher spatial resolution and an extended effective range.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| 3D | Three-Dimensional |
| ALS | Airborne Laser Scanning |
| AS | Active Stereo |
| CRP | Close Range Photogrammetry |
| CW | Continuous Wave |
| DAP | Digital Airborne Photogrammetry |
| DBH | Diameter at Breast Height |
| EMR | Electromagnetic Radiation |
| FOV | Field of View |
| IMU | Inertial Measurement Unit |
| LiDAR | Light Detection and Ranging |
| MLS | Mobile Laser Scanning |
| MSS | Multiple Scan Station |
| PBH | Perimeter at Breast Height |
| PS | Passive Stereo |
| PLS | Personal Laser Scanner |
| RGB-D | Colour and Depth |
| RMSE | Root Mean Square Error |
| RS | Remote Sensing |
| SfM | Structure from Motion |
| SIFT | Scale Invariant Feature Transform |
| SL | Structured Light |
| SLAM | Simultaneous Localisation and Mapping |
| SURF | Speeded-Up Robust Features |
| TLS | Terrestrial Laser Scanner |
| ToF | Time of Flight |
| UAV | Unmanned Aerial Vehicle |
| USD | United States Dollar |
References
- MacDicken, K.G. Global forest resources assessment 2015: What, why and how? For. Ecol. Manag. 2015, 352, 3–8. [Google Scholar] [CrossRef] [Green Version]
- Penman, J.; Gytarsky, M.; Hiraishi, T.; Krug, T.; Kruger, D.; Pipatti, R.; Buendia, L.; Miwa, K.; Ngara, T.; Tanabe, K.; et al. Good Practice Guidance for Land Use, Land-Use Change and Forestry; Institute for Global Environmental Strategies: Kanagawa, Japan, 2003. [Google Scholar]
- Keenan, R.J.; Reams, G.A.; Achard, F.; de Freitas, J.V.; Grainger, A.; Lindquist, E. Dynamics of global forest area: Results from the FAO Global Forest Resources Assessment 2015. For. Ecol. Manag. 2015, 352, 9–20. [Google Scholar] [CrossRef]
- Kangas, A.; Maltamo, M. Forest Inventory: Methodology and Applications; Springer Science & Business Media: Dordrecht, The Netherlands, 2006; Volume 10. [Google Scholar]
- McRoberts, R.E.; Tomppo, E.O. Remote sensing support for national forest inventories. Remote Sens. Environ. 2007, 110, 412–419. [Google Scholar] [CrossRef]
- Luoma, V.; Saarinen, N.; Wulder, M.A.; White, J.C.; Vastaranta, M.; Holopainen, M.; Hyyppä, J. Assessing precision in conventional field measurements of individual tree attributes. Forests 2017, 8, 38. [Google Scholar] [CrossRef] [Green Version]
- Kangas, A.; Heikkinen, E.; Maltamo, M. Accuracy of partially visually assessed stand characteristics: A case study of Finnish forest inventory by compartments. Can. J. For. Res. 2004, 34, 916–930. [Google Scholar]
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Fang, R.; Strimbu, B. Stem Measurements and Taper Modeling Using Photogrammetric Point Clouds. Remote Sens. 2017, 9, 716. [Google Scholar]
- Lee, J.H.; Ko, Y.; McPherson, E.G. The feasibility of remotely sensed data to estimate urban tree dimensions and biomass. Urban For. Urban Green. 2016, 16, 208–220. [Google Scholar] [CrossRef] [Green Version]
- Srinivasan, S.; Popescu, S.C.; Eriksson, M.; Sheridan, R.D.; Ku, N.W. Terrestrial laser scanning as an effective tool to retrieve tree level height, crown width, and stem diameter. Remote Sens. 2015, 7, 1877–1896. [Google Scholar] [CrossRef] [Green Version]
- Disney, M. How can we know what we don’t know? A Commentary on: Sampling forests with terrestrial laser scanning. Ann. Bot. 2021, 126, 685–688. [Google Scholar] [CrossRef]
- Disney, M.I.; Boni Vicari, M.; Burt, A.; Calders, K.; Lewis, S.L.; Raumonen, P.; Wilkes, P. Weighing trees with lasers: Advances, challenges and opportunities. Interface Focus 2018, 8, 20170048. [Google Scholar] [CrossRef] [Green Version]
- Saarinen, N.; Kankare, V.; Vastaranta, M.; Luoma, V.; Pyörälä, J.; Tanhuanpää, T.; Liang, X.; Kaartinen, H.; Kukko, A.; Jaakkola, A.; et al. Feasibility of Terrestrial laser scanning for collecting stem volume information from single trees. ISPRS J. Photogramm. Remote Sens. 2017, 123, 140–158. [Google Scholar] [CrossRef]
- Liang, X.; Kankare, V.; Yu, X.; Hyyppä, J.; Holopainen, M. Automated stem curve measurement using terrestrial laser scanning. IEEE Trans. Geosci. Remote Sens. 2014, 52, 1739–1748. [Google Scholar] [CrossRef]
- Hu, T.; Sun, X.; Su, Y.; Guan, H.; Sun, Q.; Kelly, M.; Guo, Q. Development and Performance Evaluation of a Very Low-Cost UAV-Lidar System for Forestry Applications. Remote Sens. 2021, 13, 77. [Google Scholar] [CrossRef]
- Donager, J.J.; Sánchez Meador, A.J.; Blackburn, R.C. Adjudicating Perspectives on Forest Structure: How Do Airborne, Terrestrial, and Mobile Lidar-Derived Estimates Compare? Remote Sens. 2021, 13, 2297. [Google Scholar] [CrossRef]
- LaRue, E.A.; Wagner, F.W.; Fei, S.; Atkins, J.W.; Fahey, R.T.; Gough, C.M.; Hardiman, B.S. Compatibility of aerial and terrestrial LiDAR for quantifying forest structural diversity. Remote Sens. 2020, 12, 1407. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent advances in unmanned aerial vehicle forest remote sensing—A systematic review. part I: A general framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Surovỳ, P.; Kuželka, K. Acquisition of forest attributes for decision support at the forest enterprise level using remote-sensing techniques—A review. Forests 2019, 10, 273. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kukko, A.; Hyyppä, J.; Lehtomäki, M.; Pyörälä, J.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Wang, Y. In-situ measurements from mobile platforms: An emerging approach to address the old challenges associated with forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 143, 97–107. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Nothdurft, A. Forest inventory with long range and high-speed personal laser scanning (PLS) and simultaneous localization and mapping (SLAM) technology. Remote Sens. 2020, 12, 1509. [Google Scholar] [CrossRef]
- Mikita, T.; Janata, P.; Surovỳ, P. Forest stand inventory based on combined aerial and terrestrial close-range photogrammetry. Forests 2016, 7, 165. [Google Scholar] [CrossRef] [Green Version]
- Goodbody, T.R.; Coops, N.C.; Marshall, P.L.; Tompalski, P.; Crawford, P. Unmanned aerial systems for precision forest inventory purposes: A review and case study. For. Chron. 2017, 93, 71–81. [Google Scholar] [CrossRef] [Green Version]
- Roman, L.A.; McPherson, E.G.; Scharenbroch, B.C.; Bartens, J. Identifying common practices and challenges for local urban tree monitoring programs across the United States. Arboric. Urban For. 2013, 39, 292–299. [Google Scholar] [CrossRef]
- Zollhöfer, M.; Stotko, P.; Görlitz, A.; Theobalt, C.; Nießner, M.; Klein, R.; Kolb, A. State of the Art on 3D Reconstruction with RGB-D Cameras. In Computer Graphics Forum; Wiley Online Library: Hoboken, NJ, USA, 2018; Volume 37, pp. 625–652. [Google Scholar]
- Nitoslawski, S.; Wong-Stevens, K.; Steenberg, J.; Witherspoon, K.; Nesbitt, L.; Konijnendijk van den Bosch, C. The digital forest: Mapping a decade of knowledge on technological applications for forest ecosystems. Earth’s Future 2021, 9, e2021EF002123. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Bay, H.; Ess, A.; Tuytelaars, T.; Van Gool, L. Speeded-up robust features (SURF). Comput. Vis. Image Underst. 2008, 110, 346–359. [Google Scholar] [CrossRef]
- Zhu, R.; Guo, Z.; Zhang, X. Forest 3D Reconstruction and Individual Tree Parameter Extraction Combining Close-Range Photo Enhancement and Feature Matching. Remote Sens. 2021, 13, 1633. [Google Scholar] [CrossRef]
- Piermattei, L.; Karel, W.; Wang, D.; Wieser, M.; Mokroš, M.; Surovỳ, P.; Koreň, M.; Tomaštík, J.; Pfeifer, N.; Hollaus, M. Terrestrial Structure from Motion Photogrammetry for Deriving Forest Inventory Data. Remote Sens. 2019, 11, 950. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; Dash, J.P.; Watt, M.S.; Breidenbach, J.; Pearse, G.D. A comparison of UAV laser scanning, photogrammetry and airborne laser scanning for precision inventory of small-forest properties. For. Int. J. For. Res. 2020, 93, 150–162. [Google Scholar] [CrossRef]
- Guimarães, N.; Pádua, L.; Marques, P.; Silva, N.; Peres, E.; Sousa, J.J. Forestry remote sensing from unmanned aerial vehicles: A review focusing on the data, processing and potentialities. Remote Sens. 2020, 12, 1046. [Google Scholar] [CrossRef] [Green Version]
- Puliti, S.; rka, H.O.; Gobakken, T.; Næsset, E. Inventory of small forest areas using an unmanned aerial system. Remote Sens. 2015, 7, 9632–9654. [Google Scholar] [CrossRef] [Green Version]
- Wallace, L.; Bellman, C.; Hally, B.; Hernandez, J.; Jones, S.; Hillman, S. Assessing the ability of image based point clouds captured from a UAV to measure the terrain in the presence of canopy cover. Forests 2019, 10, 284. [Google Scholar] [CrossRef] [Green Version]
- Goodbody, T.R.; Coops, N.C.; White, J.C. Digital aerial photogrammetry for updating area-based forest inventories: A review of opportunities, challenges, and future directions. Curr. For. Rep. 2019, 5, 55–75. [Google Scholar] [CrossRef] [Green Version]
- Krisanski, S.; Taskhiri, M.S.; Turner, P. Enhancing methods for under-canopy unmanned aircraft system based photogrammetry in complex forests for tree diameter measurement. Remote Sens. 2020, 12, 1652. [Google Scholar] [CrossRef]
- Akpo, H.A.; Atindogbé, G.; Obiakara, M.C.; Adjinanoukon, A.B.; Gbedolo, M.; Lejeune, P.; Fonton, N.H. Image Data Acquisition for Estimating Individual Trees Metrics: Closer Is Better. Forests 2020, 11, 121. [Google Scholar]
- Forsman, M.; Börlin, N.; Holmgren, J. Estimation of tree stem attributes using terrestrial photogrammetry with a camera rig. Forests 2016, 7, 61. [Google Scholar] [CrossRef]
- Dandois, J.P.; Olano, M.; Ellis, E.C. Optimal altitude, overlap, and weather conditions for computer vision UAV estimates of forest structure. Remote Sens. 2015, 7, 13895–13920. [Google Scholar]
- Hyyppä, J.; Virtanen, J.P.; Jaakkola, A.; Yu, X.; Hyyppä, H.; Liang, X. Feasibility of Google Tango and Kinect for crowdsourcing forestry information. Forests 2018, 9, 6. [Google Scholar] [CrossRef] [Green Version]
- Tomaštík, J.; Saloň, Š.; Tunák, D.; Chudỳ, F.; Kardoš, M. Tango in forests—An initial experience of the use of the new Google technology in connection with forest inventory tasks. Comput. Electron. Agric. 2017, 141, 109–117. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, Z.; Mannan, A.; Khan, T.U.; Shen, C.; Saeed, S. Estimating tree position, diameter at breast height, and tree height in real-time using a mobile phone with RGB-D SLAM. Remote Sens. 2018, 10, 1845. [Google Scholar] [CrossRef] [Green Version]
- Drouin, M.A.; Seoud, L. Consumer-Grade RGB-D Cameras. In 3D Imaging, Analysis and Applications; Springer: Berlin/Heidelberg, Germany, 2020; pp. 215–264. [Google Scholar]
- Tölgyessy, M.; Dekan, M.; Chovanec, L.; Hubinskỳ, P. Evaluation of the azure Kinect and its comparison to Kinect V1 and Kinect V2. Sensors 2021, 21, 413. [Google Scholar] [CrossRef]
- McGlade, J.; Wallace, L.; Hally, B.; White, A.; Reinke, K.; Jones, S. An early exploration of the use of the Microsoft Azure Kinect for estimation of urban tree Diameter at Breast Height. Remote Sens. Lett. 2020, 11, 963–972. [Google Scholar] [CrossRef]
- Zollhöfer, M. Commodity RGB-D sensors: Data acquisition. In RGB-D Image Analysis and Processing; Springer: Berlin/Heidelberg, Germany, 2019; pp. 3–13. [Google Scholar]
- Liu, Y.; Pears, N.; Rosin, P.L.; Huber, P. 3D Imaging, Analysis and Applications; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the 2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06), New York, NY, USA, 17–22 June 2006; Volume 1, pp. 519–528. [Google Scholar]
- Se, S.; Pears, N. Passive 3D imaging. In 3D Imaging, Analysis and Applications; Springer: Berlin/Heidelberg, Germany, 2012; pp. 35–94. [Google Scholar]
- Grunnet-Jepsen, A.; Sweetser, J.N.; Winer, P.; Takagi, A.; Woodfill, J. Projectors for Intel® RealSense™ Depth Cameras D4xx; Intel Support; Interl Corporation: Santa Clara, CA, USA, 2018. [Google Scholar]
- Kuan, Y.W.; Ee, N.O.; Wei, L.S. Comparative study of intel R200, Kinect v2, and primesense RGB-D sensors performance outdoors. IEEE Sens. J. 2019, 19, 8741–8750. [Google Scholar] [CrossRef]
- Mulverhill, C.; Coops, N.C.; Tompalski, P.; Bater, C.W.; Dick, A.R. The utility of terrestrial photogrammetry for assessment of tree volume and taper in boreal mixedwood forests. Ann. For. Sci. 2019, 76, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Mokroš, M.; Mikita, T.; Singh, A.; Tomaštík, J.; Chudá, J.; Wężyk, P.; Kuželka, K.; Surovỳ, P.; Klimánek, M.; Zięba-Kulawik, K.; et al. Novel low-cost mobile mapping systems for forest inventories as terrestrial laser scanning alternatives. Int. J. Appl. Earth Obs. Geoinf. 2021, 104, 102512. [Google Scholar] [CrossRef]
- Bauwens, S.; Fayolle, A.; Gourlet-Fleury, S.; Ndjele, L.M.; Mengal, C.; Lejeune, P. Terrestrial photogrammetry: A non-destructive method for modelling irregularly shaped tropical tree trunks. Methods Ecol. Evol. 2017, 8, 460–471. [Google Scholar] [CrossRef]
- Akpo, H.A.; Atindogbé, G.; Obiakara, M.C.; Gbedolo, M.A.; Laly, F.G.; Lejeune, P.; Fonton, N.H. Accuracy of tree stem circumference estimation using close range photogrammetry: Does point-based stem disk thickness matter? Trees For. People 2020, 2, 100019. [Google Scholar] [CrossRef]
- Mokroš, M.; Vỳbošt’ok, J.; Grznárová, A.; Bošela, M.; Šebeň, V.; Merganič, J. Non-destructive monitoring of annual trunk increments by terrestrial structure from motion photogrammetry. PLoS ONE 2020, 15, e0230082. [Google Scholar] [CrossRef]
- Surovỳ, P.; Yoshimoto, A.; Panagiotidis, D. Accuracy of reconstruction of the tree stem surface using terrestrial close-range photogrammetry. Remote Sens. 2016, 8, 123. [Google Scholar] [CrossRef] [Green Version]
- Kozak, A. My last words on taper equations. For. Chron. 2004, 80, 507–515. [Google Scholar] [CrossRef] [Green Version]
- Berveglieri, A.; Tommaselli, A.M.; Liang, X.; Honkavaara, E. Vertical optical scanning with panoramic vision for tree trunk reconstruction. Sensors 2017, 17, 2791. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mokroš, M.; Liang, X.; Surovỳ, P.; Valent, P.; Čerňava, J.; Chudỳ, F.; Tunák, D.; Saloň, Š.; Merganič, J. Evaluation of close-range photogrammetry image collection methods for estimating tree diameters. ISPRS Int. J.-Geo-Inf. 2018, 7, 93. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Jaakkola, A.; Wang, Y.; Hyyppä, J.; Honkavaara, E.; Liu, J.; Kaartinen, H. The use of a hand-held camera for individual tree 3D mapping in forest sample plots. Remote Sens. 2014, 6, 6587–6603. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Wang, Y.; Jaakkola, A.; Kukko, A.; Kaartinen, H.; Hyyppä, J.; Honkavaara, E.; Liu, J. Forest data collection using terrestrial image-based point clouds from a handheld camera compared to terrestrial and personal laser scanning. IEEE Trans. Geosci. Remote Sens. 2015, 53, 5117–5132. [Google Scholar] [CrossRef]
- Hunčaga, M.; Chudá, J.; Tomaštík, J.; Slámová, M.; Koreň, M.; Chudỳ, F. The Comparison of Stem Curve Accuracy Determined from Point Clouds Acquired by Different Terrestrial Remote Sensing Methods. Remote Sens. 2020, 12, 2739. [Google Scholar] [CrossRef]
- Bayati, H.; Najafi, A.; Vahidi, J.; Gholamali Jalali, S. 3D reconstruction of uneven-aged forest in single tree scale using digital camera and SfM-MVS technique. Scand. J. For. Res. 2021, 36, 210–220. [Google Scholar] [CrossRef]
- Marzulli, M.I.; Raumonen, P.; Greco, R.; Persia, M.; Tartarino, P. Estimating tree stem diameters and volume from smartphone photogrammetric point clouds. For. Int. J. For. Res. 2020, 93, 411–429. [Google Scholar] [CrossRef]
- Gollob, C.; Ritter, T.; Kraßnitzer, R.; Tockner, A.; Nothdurft, A. Measurement of Forest Inventory Parameters with Apple iPad Pro and Integrated LiDAR Technology. Remote Sens. 2021, 13, 3129. [Google Scholar] [CrossRef]
- Fan, Y.; Feng, Z.; Shen, C.; Khan, T.U.; Mannan, A.; Gao, X.; Chen, P.; Saeed, S. A trunk-based SLAM backend for smartphones with online SLAM in large-scale forest inventories. ISPRS J. Photogramm. Remote Sens. 2020, 162, 41–49. [Google Scholar] [CrossRef]
- Mokroš, M.; Vỳbošt’ok, J.; Tomaštík, J.; Grznárová, A.; Valent, P.; Slavík, M.; Merganič, J. High precision individual tree diameter and perimeter estimation from close-range photogrammetry. Forests 2018, 9, 696. [Google Scholar] [CrossRef] [Green Version]
- Kuželka, K.; Surovỳ, P. Mathematically optimized trajectory for terrestrial close-range photogrammetric 3D reconstruction of forest stands. ISPRS J. Photogramm. Remote Sens. 2021, 178, 259–281. [Google Scholar] [CrossRef]
- D’Urban Jackson, T.; Williams, G.J.; Walker-Springett, G.; Davies, A.J. Three-dimensional digital mapping of ecosystems: A new era in spatial ecology. Proc. R. Soc. B 2020, 287, 20192383. [Google Scholar] [CrossRef] [PubMed] [Green Version]



| Low-Cost Sensor Technology | Benefits | Limitations | Example Devices |
|---|---|---|---|
| SfM Photogrammetry * | Capture on digital cameras and mobile phones | Computationally intensive post-processing required | Any suitable digital camera |
| Established capture and processing methodologies | Requires dense image sampling | ||
| Requires sufficient ambient light to illuminate environment being captured | |||
| Potentially inconsistent outcomes | |||
| white Time-of-Flight RGB-D ** | Small sensor profile and component baseline distances | Short effective range (<6 m) that can be reduced by ambient electromagnetic radiation (EMR) | Apple iPad (2020) |
| Near-real-time scene reconstruction and visualisation with simultanious localisation and mapping (SLAM) | Prone to increased sensor noise caused by ambient EMR | Apple iPhone 13 Pro | |
| Integrated into mobile phones, tables and augmented reality headsets | Prone to SLAM misalignment error | Microsoft Azure Kinect | |
| Microsoft Hololens 2 | |||
| Google Tango | |||
| Passive Stereo RGB-D * | Low power consumption | Depth sensing requires baseline distance between sensors | Stereolabs Zed 2 |
| Near-real-time scene reconstruction and visualisation | Requires sufficient ambient light to illuminate environment being captured | ||
| Prone to SLAM misalignment error | |||
| Active Stereo RGB-D ** | No priori knowledge of projected EMR pattern | Short effective range (<3 m) | Intel RealSense D445 |
| Near-real-time scene reconstruction and visualisation | Ambient EMR can reduce sensor range | ||
| Prone to SLAM misalignment error | |||
| Structured Light RGB-D ** | Near real-time scene reconstruction and visualisation | Reliant on deformation in known projected pattern of points | Microsoft Kinect V1 |
| Ambient EMR can result in missing point-cloud information | |||
| Prone to SLAM misalignment error | |||
| Superseded by Active Stereo RGB-D |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
McGlade, J.; Wallace, L.; Reinke, K.; Jones, S. The Potential of Low-Cost 3D Imaging Technologies for Forestry Applications: Setting a Research Agenda for Low-Cost Remote Sensing Inventory Tasks. Forests 2022, 13, 204. https://doi.org/10.3390/f13020204
McGlade J, Wallace L, Reinke K, Jones S. The Potential of Low-Cost 3D Imaging Technologies for Forestry Applications: Setting a Research Agenda for Low-Cost Remote Sensing Inventory Tasks. Forests. 2022; 13(2):204. https://doi.org/10.3390/f13020204
Chicago/Turabian StyleMcGlade, James, Luke Wallace, Karin Reinke, and Simon Jones. 2022. "The Potential of Low-Cost 3D Imaging Technologies for Forestry Applications: Setting a Research Agenda for Low-Cost Remote Sensing Inventory Tasks" Forests 13, no. 2: 204. https://doi.org/10.3390/f13020204