
The Permanent German Forest Rescue Point System—Concept, Geographical Analysis, and Optimisation


Forest Operations, University of Freiburg, Werthmannstr. 6, 79085 Freiburg, Germany
Forests 2022, 13(2), 197; https://doi.org/10.3390/f13020197
Submission received: 7 January 2022
/
Revised: 22 January 2022
/
Accepted: 25 January 2022
/
Published: 27 January 2022
(This article belongs to the Section Forest Operations and Engineering)
Abstract
:Working in the forest is dangerous, especially in the case of motor manual work, which represents a significant proportion of all forest work in Germany. Nevertheless, many accidents in the forest also happen during recreational activities. In the unfortunate case of an accident, rapid assistance is therefore crucial. For provision of this service, a network of 63,718 high quality permanent rescue points has been established in Germany, known to all persons involved in rescue operations. These can serve as meeting points and points of orientation. The question emerges whether the number of points is sufficient and whether they are well distributed and ideally placed for conducting a rescue in the forest. Therefore, this study aims to provide a granular complex geographic analysis of the indices of distribution and the accessibility of existing rescue points. These analyses form the basis for improving and optimising the existing permanent rescue point system at federal states and the federal level. This study has developed, calculated, analysed, and assessed nine different spatial indices, which can serve as a basis for decision making in the evaluation and adaptation of the system. The indices reveal considerable federal states differences in the designation of rescue points, in terms of number, density, and distribution.
1. Introduction
1.1. Occupational Accidents
Forest work is dangerous. In particular, manual or motor manual work still exists in large parts of both the professional sector and in the management of small private forests. For example, Germany has a large number of forest owners, estimated at approx. 2,000,000. Accidents that happen in the forest often involve severe injuries. In 2020, 4834 (2019: 5257) accidents during forestry work were reported in Germany. 1533 (2019: 1680) people were so seriously injured that they were unable to work for more than three days. 26 (2019: 36) people lost their lives while working in the forest [1]. Furthermore, if people are working in the forest, providing a description of the accident site is difficult, and the path by which the rescue service can reach the injured person is often unclear. An example of this is the passability of forest roads. Thus, it should be ensured that the forest roads leading to the accident site can be used by rescue vehicles (all year round), are suitable for these vehicles, and have no obstacles [2,3,4,5].
Additionally, occupational safety laws and accident prevention regulations require precautions such as access to emergency medical care, rescue facilities, regular training, provision of first aid materials, adherence to safe work procedures [6,7]. Therefore, having a comprehensive and working rescue concept is essential.
Especially in the case of calamities (e.g., storm damage, drought, bark beetle), which have increased in recent years, an increased risk of accidents for forest workers is to be expected [8], and the accident rate can be double that encountered during normal forestry operations [9].
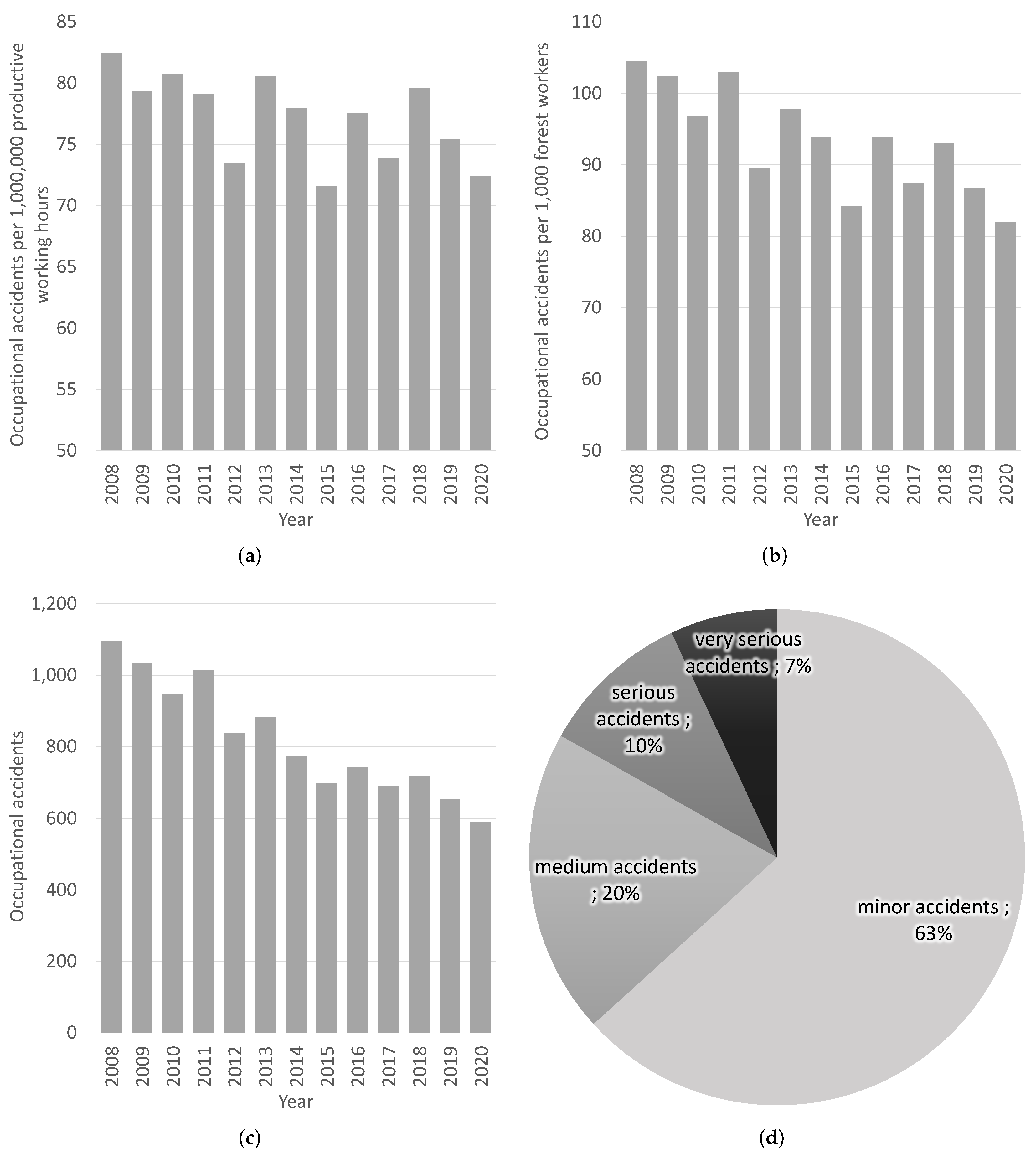
Under German law, occupational accidents must be reported if they result in incapacity to work for more than three days or in death [10]. The accident statistics of employed forestry workers in the state forestry enterprises, state forestry administrations, and federal forestry are compiled and prepared as part of accident statistics [11]. Figure 1 shows a selection of these data, where only reportable accidents are counted.
The accident severity statistics (Figure 1d) are characterised by days of lost service and categorised and presented as minor accidents (4–20 days lost), medium accidents (21–45 days lost), severe accidents (46–90 days lost) and very severe accidents (more than 90 days lost).
The occupational accident statistics are illustrated as absolute number (Figure 1c), occupational accidents per 1,000,000 productive working hours (Figure 1a), as well as occupational accidents per 1000 forest workers (Figure 1d).
From the accident statistics of employed forestry workers, a development trend can be derived from these statistics and decisions for accident prevention can be derived to evaluate implemented occupational health and safety measures. For example, the relative number of accidents, measured in accidents per million hours worked, shows a slight decreasing trend [1]. This is also reported from other countries such as Austria, New Zealand, and Slovakia [12,13,14]. However, there are still many accidents, and rapid first aid and, thus, a rapid response system is essential.
The presented statistics are limited to the defined reportable accidents in the state forests. This does not include non-reportable accidents or those associated wit private forestry contractors and private forest owners, which are difficult to record. It can be deduced from this that there are also many unreported cases in the recording of occupational forest accidents. In addition, there are many forest visitors, such as mountain bikers, who can also have accidents in the forest and are reliant on a well-functioning rescue system in the forest [2].
Therefore, a comprehensive and functional rescue concept is essential. This is especially important for professional forestry work.
1.2. Forest Rescue Concepts
There is a considerable risk of injury during forestry work. It is therefore advisable to work at least in pairs or even in threes, and not only when harvesting timber. Receiving effective and rapid first aid in forest areas is rather unlikely when working alone.
The standardised rescue concept for three-person work is as follows: If an accident occurs, the first priority is to secure the accident site and care for the injured person. Then, an emergency call is made. When making the emergency call, the nearest accessible rescue meeting point is mentioned. Afterwards, one person goes to this rescue meeting point to wait for the rescue service and then to guide the rescue service to the injured person using the fastest possible route. The second person continues to take care of the injured person.
A severe problem with the two-person working group is the lack of a third person who can take over the guide function. If the emergency is in an area without cell phone reception, the first responder is forced to leave the injured person alone for a short time in order to make the emergency call [3,15,16].
Emergency calls are received by integrated control centres, which use state-of-the-art IT systems to coordinate all the assistance provided by rescue services, fire brigades, and the Federal Agency for Technical Relief and delegate the emergency call to the responsible agencies. The positions of the rescue points and other information are available to the integrated control centres in a quality-assured manner and are appropriately forwarded.
Today, the rescue of injured forest workers, in contrast to the rescue of recreational people, is a relatively rare occurrence, especially in tourist areas. Studies of fire department reports of an 8000 ha forest area in a region of Baden-Württemberg over ten years have revealed 104 recreational accidents in the forest compared to 8 accidents of forest workers. In the federal state of Baden-Württemberg, the guidelines are that the response time for emergency medical reasons should be a maximum of 15 min. According to the rescue plan, these times should be reached for 95% of the operations [17,18]. This applies to all operations, including forestry. However, it was also shown that in 75% of operations, the arrival time was 18:42 min (median 13:21 min), which is higher than the maximum of 15 min rescue time to be respected for 95% [4,19].
1.3. Forest Rescue Point System
The system of fixed rescue points has been established in some areas of Germany for a long time. For example, a system of fixed rescue meeting points was established in the Bavarian state forest as early as the 1990s. In addition to establishing a clear meeting point for the rescue service, providing the fastest route to a landline telephone also played a major role at that time. With the current predominant use of smartphones, the role of the rescue meeting points has changed. However, this system was purely internal and therefore the locations and details of rescue points were not made available to the public. For outsiders (e.g., outdoor sportsmen, recreationists, hunters), the points in the internal system were unknown and could not be used [20,21].
The aforementioned rescue points form a system of meeting points in or near the forest and are intended to serve as clear orientation points. Additionally, they should provide the possibility for rescue services and the party requesting this service to meet at these points in the event of an emergency. Such points are simply meeting points with well defined and known coordinates and pieces of information. First aid equipment is not available.
The rescue points in use meet various requirements and are usually quality-tested. Currently, 63,718 such official rescue points are available as part of this centrally coordinated system in Germany [5,22].
Most of the rescue points are marked with a sign in the field. The numbering and presentation may vary between federal states, as many have different historical origins and vary in federal regulations and competencies. Figure 2 shows examples for the signage of the rescue points for different federal states. Maintenance of the signposting of rescue points in the terrain is not ensured everywhere.
Due to the federal structures and different types of forest ownership, rescue points are implemented very differently throughout Germany. There is no direct legal basis or public mandate for forest rescue points in Germany and, thus, no uniform regulation—each forest owner is responsible for this themself. The coexistence of different solutions and the lack of agreements on points close to the border complicate the handling both for the rescue control centres and for the users [5].
Historically, the rescue points have been developed and implemented differently in the various regions and federal states of Germany. In 2013, most of the German federal states representatives met and agreed on a standard or similar approach to selecting, installing, and managing the rescue points to achieve harmonisation and quality assurance throughout Germany. One of the results was a guideline for the creation and quality assurance of the used forest rescue points [5].
The central office of the KWF (Kuratorium für Waldarbeit und Forsttechnik e. V.—Board of Trustees for Forest Work and Forest Engineering) coordinates the development and harmonisation of the rescue points, regularly collects the information from the various institutes of the federal states, and then makes this available in summarised form.
It was determined that the permanent rescue points to be created should meet defined requirements. It is recommended that they be distinctive places close to or in the forest. Regarding the spatial location of rescue points, the following main guidelines are given:
- Rescue points must be accessible by rescue vehicles all year round, even in bad weather. Therefore, the rescue points should be located predominantly on public roads (state, county, and municipal roads), preferably at forest entrances/approaches and hiker parking areas.
- If a designation in the forest is necessary, prominent points such as trail junctions, hiking cabins, or similar should be chosen on forest trails that are accessible all year round (NavLog way class 1 to 3).
- Rescue points must be located in a way that is safe for traffic (not in curves, no danger to flowing traffic).
- Mobile phone network reception should be available at the rescue point, if possible.
- The involvement of local emergency services (rescue service, fire department, mountain rescue service) is recommended for the final location decision.
These standards should be fulfilled as far as possible for the used points. Another requirement was that these rescue points should be on a public road or a NavLog road. If these locations are on public roads, they have to be traffic-safe. NavLog is the German permanent truck logistics road dataset of the forest [23,24]. Therefore, this road has to be accessible all year round for vehicles without four-wheel drive [25].
The rescue points are freely available as marked points in the forest, such as in maps or IT applications [5,26]. It was, and still is, common practice to display rescue points offline on analogue printed maps both at work orders, in work trucks, at rescue dispatch centres, and on emergency service vehicles. The concept of rescue points is based on permanent points. The information on these points is not deleted again in the rescue control centres, even in changes, as old cards with old numbers could be in circulation.
Experiments and evaluation of rescue data have shown that the use of dedicated orientation points, such as rescue meeting points, and sufficiently high-quality maps and navigation bases, such as NavLog, in the forest increases the ability to find people who have had accidents and reduces the rescue time [3,4,27].
1.4. Foreign Rescue Point Systems
Other countries have also adopted a system of permanent rescue points, although in a version that is usually not as strongly coordinated or pronounced. In addition, these are often initiated or operated by non-forestry institutions, such as water rescue organisations or tourist associations [28,29].
In Austria, in the province of Vorarlberg, every cycle route sign has a unique location number and also fulfils a dual function in also serving as rescue meeting point [28].
In Denmark, official rescue points that are operated by the lifeguards are available at all bathing sites and ensure that emergency services can identify exactly where to send the rescue team in an emergency. The rescue points are signs with the emergency numbers that are installed by the individual municipalities [29].
The Czech Republic has been building a system of permanent rescue points since 2008 under the leadership of the General Directorate of Fire and Rescue Services of the Czech Republic. Around 2500 (status October 2016) rescue points are available [30,31,32].
In addition, many countries have temporary rescue points that are used during forestry operations in the forest and are specified in the contract documents.
1.5. Rescue Point Numbers and Density
The German permanent rescue point system is not static; it can be adapted if necessary. When creating, thinning out, or condensing the rescue points, the question usually arises as to how many rescue points are sufficient and how high should the density of rescue points be. The number and arrangement of rescue points is essentially dependent on the extent of the forest and relief structure as well as the quality of the forest road system.
At present, the number or density of rescue points has not been specified. A rough guideline is provided by the rule that it should be possible to reach one rescue point from another within 10 min. Another possible guideline is that 3–5 rescue points should be established per 1000 hectares in large closed forest complexes or 6–8 rescue points per 1000 hectares in small isolated forest areas [5,20].
This leads to the question of whether there are enough rescue points and are they well distributed.
This study aimed to analyse the existing rescue points in Germany and to develop and identify suitable indices to provide the basis for assessing a sufficient number and spatial distribution of these rescue points.
2. Materials and Methods
2.1. Data Basis
Freely available data of the existing German rescue points were used for the current study. These are collected, processed and provided by KWF (Kuratorium für Waldarbeit und Forsttechnik e. V—Board of Trustees for Forest Work and Forest Engineering) under the CC-BY-ND 3.0 license. The data are available in three different geospatial data formats: ESRI Shape (shp), Keyhole Markup Language (KML), and GPS Exchange Format (GPX) [22].
The KWF, as a national organisation, collects the rescue point data centrally, makes it available for use free of charge, and takes care of the respective updates [22]. However, the responsibility for collecting and maintaining the rescue points is with the institutes of the federal states, large forest owners, municipalities, or other institutions.
The data were available as version 2.10. Not all federal states provide these data in this way, and gaps were filled with the rescue point data included in the points of interest of the NavLog dataset [24] version 1.11. Thus, the quality-assessed rescue point data from all 13 German federal territorial states were available in this study. This corresponds to a total number of 63,718 rescue points from 80 different data suppliers.
This study combined the rescue points with forest area. For this, the freely available OSM data (land use) with a definition query on ’forest’ as a uniform national forest data layer were used.
Different road datasets were combined to calculate the travel distances in and out of the forest. Outside the forest, the study is based on the OSM road data. Inside the forest, the NavLog dataset was used. This NavLog dataset is a nationally available forest road dataset developed, collected, and updated for the control and navigation of timber logistics. From this NavLog dataset, road classes 1–3, 9, 91 (truck accessible), and road class 5 (car accessible) in sum 386,000 km were used as the data basis for the forest road data. Both road datasets were digitally connected as a unified network at defined connection points using the ArcGISPro and the ESRI Network Analyst Extension. Thus, a national road forest network was available with which network distances can be calculated.
2.2. The Data Model of Rescue Point Data
Table 1 shows the data model of the used rescue point ESRI Shape data. The data model of the present rescue points represents the lowest common denominator of the available data on rescue points from the different data owners. There is usually more data available from regional data providers. The Bavarian State Forests and the Bavarian State Forestry Administration have uniformly provided the rescue (meeting) points with more comprehensive information for Bavaria. They also contain information on street names in the nearby area, the date of data capture, the approach text for rescue vehicles, and nearby helicopter landing possibilities.
2.3. Calculation of Indices
There are a large number of rescue points in Germany. However, it is difficult to judge whether the number is sufficient for the requirements and whether the rescue points are sufficiently well distributed. Therefore, several, mainly spatial, parameters and indices are to be derived for the dataset. In current study, the different indices will be calculated from the 13 territorial federal states and the federal level. A further subdivision into regions is not made in this paper. ESRI ArcGIS Pro as well as the programming languages R and Python were used to evaluate, calculate, and draw the indices.
2.3.1. Analysis of Standard Indices and Point Density
Several standard indices can be calculated based on the available data. This includes, for example, the absolute number of rescue points, the related area in km, the related forest area in km, the forestation percentage (%) as well as density indices such as rescue points () in relation to the total area and rescue in relation to the forest area.
2.3.2. Analysis of Mean Rescue Distances
When analysing the mean rescue distance, it can be assumed that an emergency can occur anywhere in the forest (possibly also in the near outside).
In order to determine the potential rescue distance from the forest, a numerical approach was chosen. Therefore, ten million points were randomly placed within the area of Germany. Technically, the generated points were randomly spacial placed within the polygon of Germany using the ArcGIS geoprocessing function ‘Create Random Points’ [33].
The ten million random sample points (RSPs) correspond to an average of one RSP per 3.58 ha. No distinction was made between the different land uses when generating the points. A GIS overlay analysis with OSM forest areas was assigned. The results show there are 3,189,447 RSPs within forest areas and 6,810,553 RSPs within non-forest areas. The randomly generated points thus represent possible accident locations in the forest and contribute to numerical analysis.
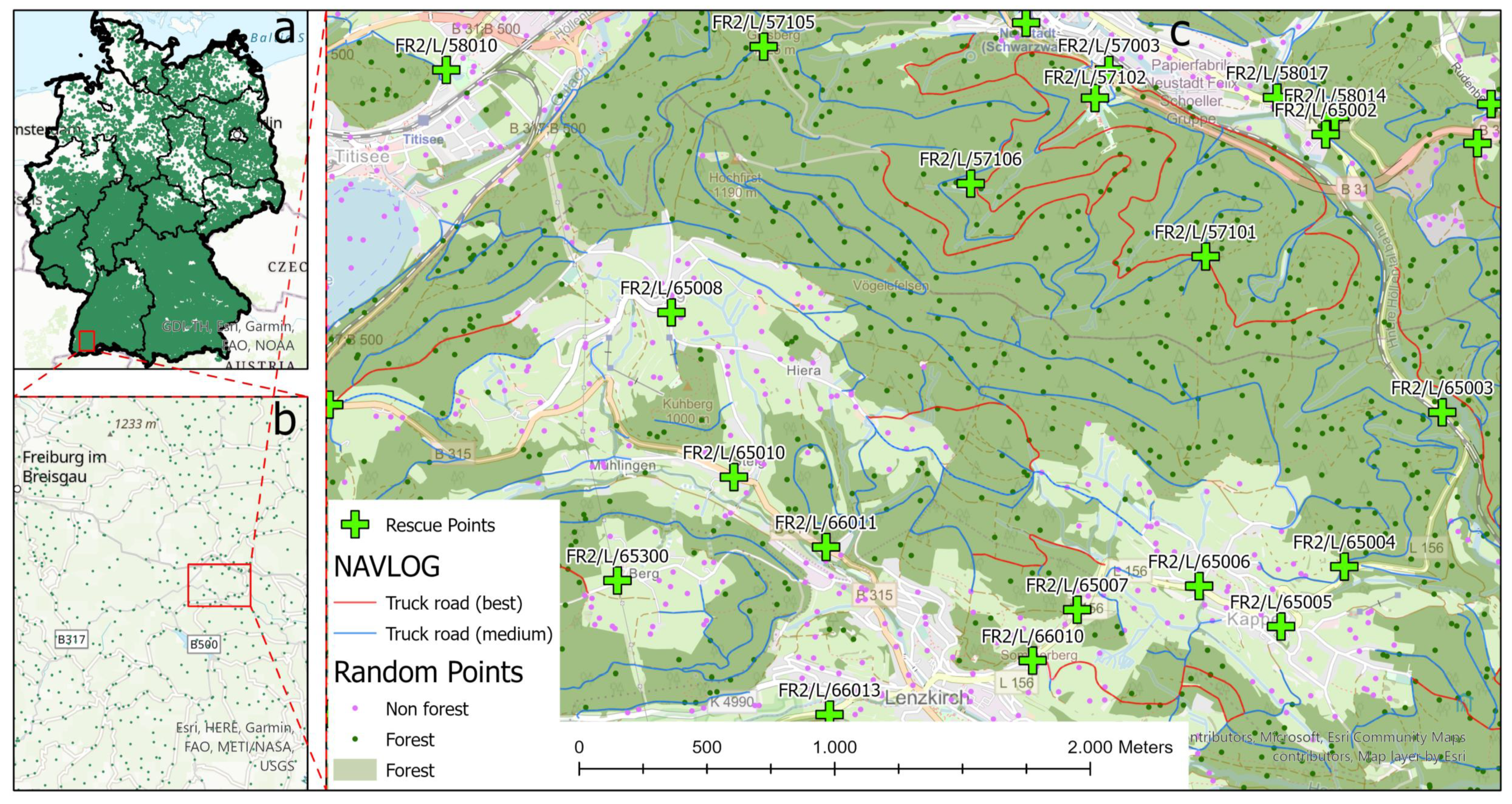
Figure 3c shows a local example map of the spatial distribution of the existing rescue points (green crosses) and their spatial distribution to the forest (dark green) and non-forest areas. The forest road network NavLog is displayed with the two different truck road categories as red lines (best) and blue lines (medium). Furthermore, an illustration of the used random sample points (10,000,000 for Germany) inside (green points) and outside (purple points) of the forest can be seen in Figure 3.
Several indices can be developed based on the generated random points to analyse the mean rescue distances. Therefore, the average distance between an accident victim in the forest outside the forest roads and the nearest forest road or the nearest existing rescue points can be determined. Several indices, based on the RSPs in the forest, are to be derived:
- (a)
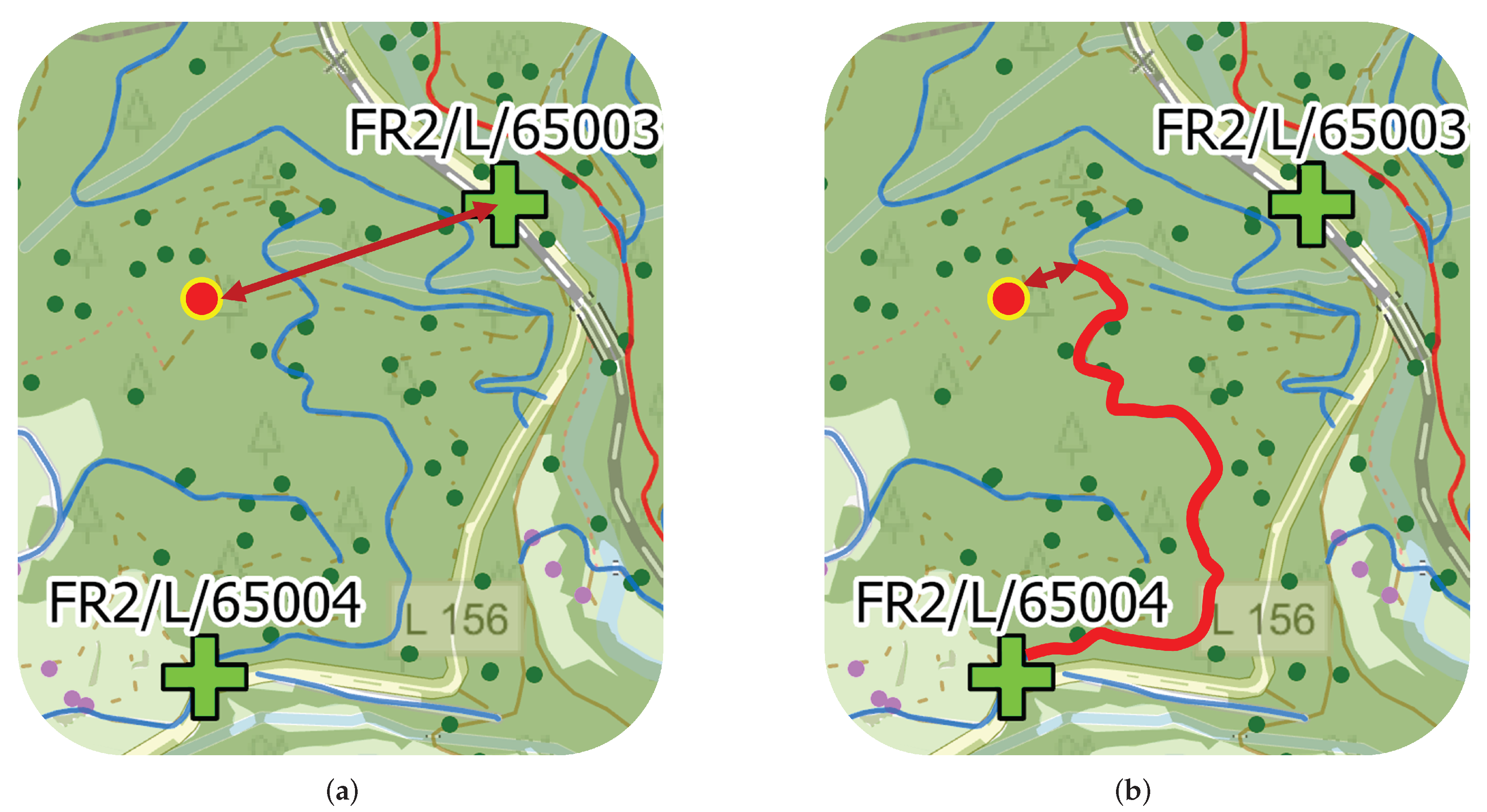
- Euclidean distance to the nearest rescue pointFor each RSP within the forest area, the shortest distance to the nearest available rescue point was calculated using the Euclidean distance. Figure 4a illustrates the principle of this distance determination. This corresponds to the distance that a rescue team would have to cover on a direct route and is an index for the density of the rescue points.
- (b)
- Euclidean distance to the nearest NavLog roadFor each RSP within the forest area, the shortest distance to the nearest available NavLog road was calculated using the Euclidean distance. Figure 4b illustrates the principle of this distance determination as a dark red double arrow. This corresponds to the distance a rescue team would have to cover on a direct route to the nearest available road.
- (c)
- Transport distance to the nearest rescue pointFor each RSP within the forest area, the shortest transport distance to the nearest available rescue point on NavLog road was calculated. For this, first, the Euclidean distance to the nearest NavLog road was determined. Additionally, from the meeting point with the NavLog road, the shortest road network distance was calculated using ArcGIS Network Analyst. To make the calculations fast and efficient, network service areas for each rescue point with a resolution of 50 m were calculated. The sum of both distances is then the transport distance. Figure 4b illustrates the principle of this distance determination as a dark red double arrow plus the red line. This index corresponds to the distance a rescue team would cover to the nearest rescue point and is closest to reality.
2.3.3. Analysis of Geometrical Densities
- (a)
- Spatial point densityThe spatial point density of the rescue points was calculated as a visual indicator. The density of recording points is calculated using the features around each output grid cell, defining a neighbourhood around the centre of each grid cell. Subsequently, the number of points that fall in the neighbourhood is totalled and divided by the area of the neighbourhood [34]. This was realised in ESRI ArcGIS Pro.
- (b)
- Thiessen polygonsAnother density index results from the total forest area that a rescue point covers or is responsible for. This area can be calculated mathematically using Thiessen polygons. Thiessen polygons (also called Voronoi diagram) can divide the reachable forest area covered by the rescue point into Thiessen or proximal zones. These zones represent full areas where any location within the zone is closer to its associated rescue point than to any other rescue point. The calculation of the Thiessen polygons in ESRI ArcGIS Pro was generated over the entire area of Germany. The forest areas were then clipped out to determine the corresponding forest area for each rescue point.
- (c)
- Euclidean distance from a rescue point to the nearest forestThe rescue points are not always located in the forest. Often, they are at the edges of the forest or easily accessible landmarks outside the forest. In order to be able to assess this, the distance from the rescue point to the forest was calculated. This was calculated as Euclidean distance, i.e., the direct distance to the nearest forest. If the rescue point is directly in the forest, the value is 0 m.
- (d)
- Euclidean distance from one rescue point to the next rescue pointAnother density index is the distance from one rescue point to the next rescue point. This was calculated as the Euclidean distance, i.e., the direct distance to the nearest forest.
3. Results
3.1. Standard Indices and Point Density
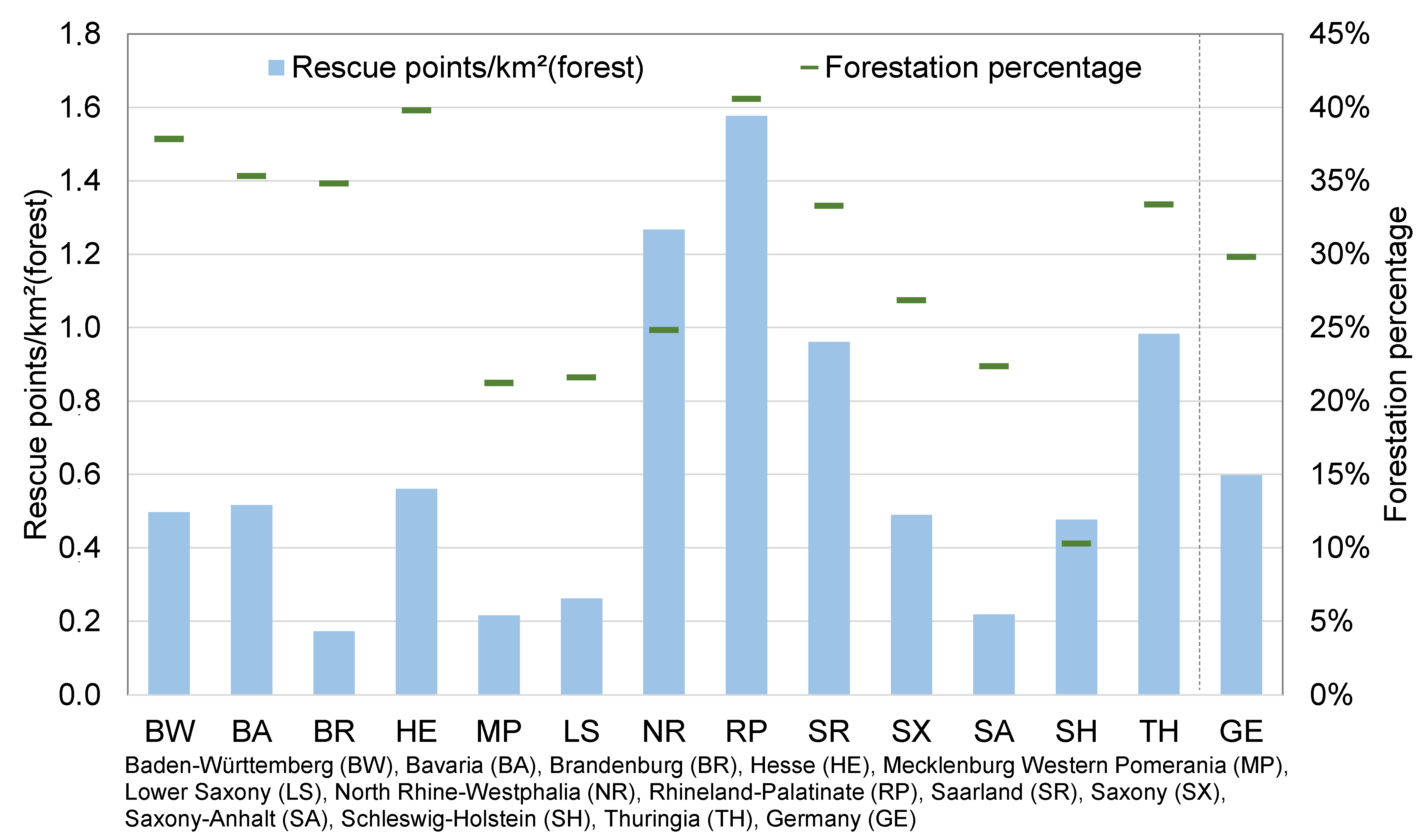
In Figure 5 and Table 2, the calculated and derived standard indices of the federal level rescue point data model are illustrated, based on the federal level data provided by the KWF and NavLog.
Figure 5 shows the distribution of forest cover percentages (green) and the density of rescue points in points per square kilometre in the different federal states. The distribution varies in density and between the federal states. The density is very high in North Rhine-Westphalia and Rhineland-Palatinate in contrast to states such as Mecklenburg-Western Pomerania or Brandenburg.
Interestingly, two of the three most densely forested federal states, such as Baden-Württemberg and Bavaria, have a high forest cover percentage of 35% and 38%, respectively, but only a low density of rescue points (0.5 and 0.52 ). With a high forest density of 41%, Rhineland-Palatinate also has a very high density of rescue points of 1.58 . A correlation between forest density and rescue point density cannot be identified at the federal state level.
Table 2 shows the absolute number and the rescue point density in for forest-covered land as well for the whole area. The variances between the federal states become clear. The absolute numbers of the rescue points vary from 856 (Saarland) to 12,863 (Bavaria), and the relative densities of rescue points concerning forest area vary from 0.17 (Brandenburg) to 1.58 (Rhineland-Palatinate), far from the average of 0.6 in Germany.
3.2. Mean Rescue Distances
The numerical approach using ten million random points in Germany was chosen to calculate the different mean rescue distances. The results present just the relative cumulative distribution of the individual distances for each of the RSPs within the forest area (n = 3,189,44).
3.2.1. Euclidean Distance to the Nearest Rescue Point
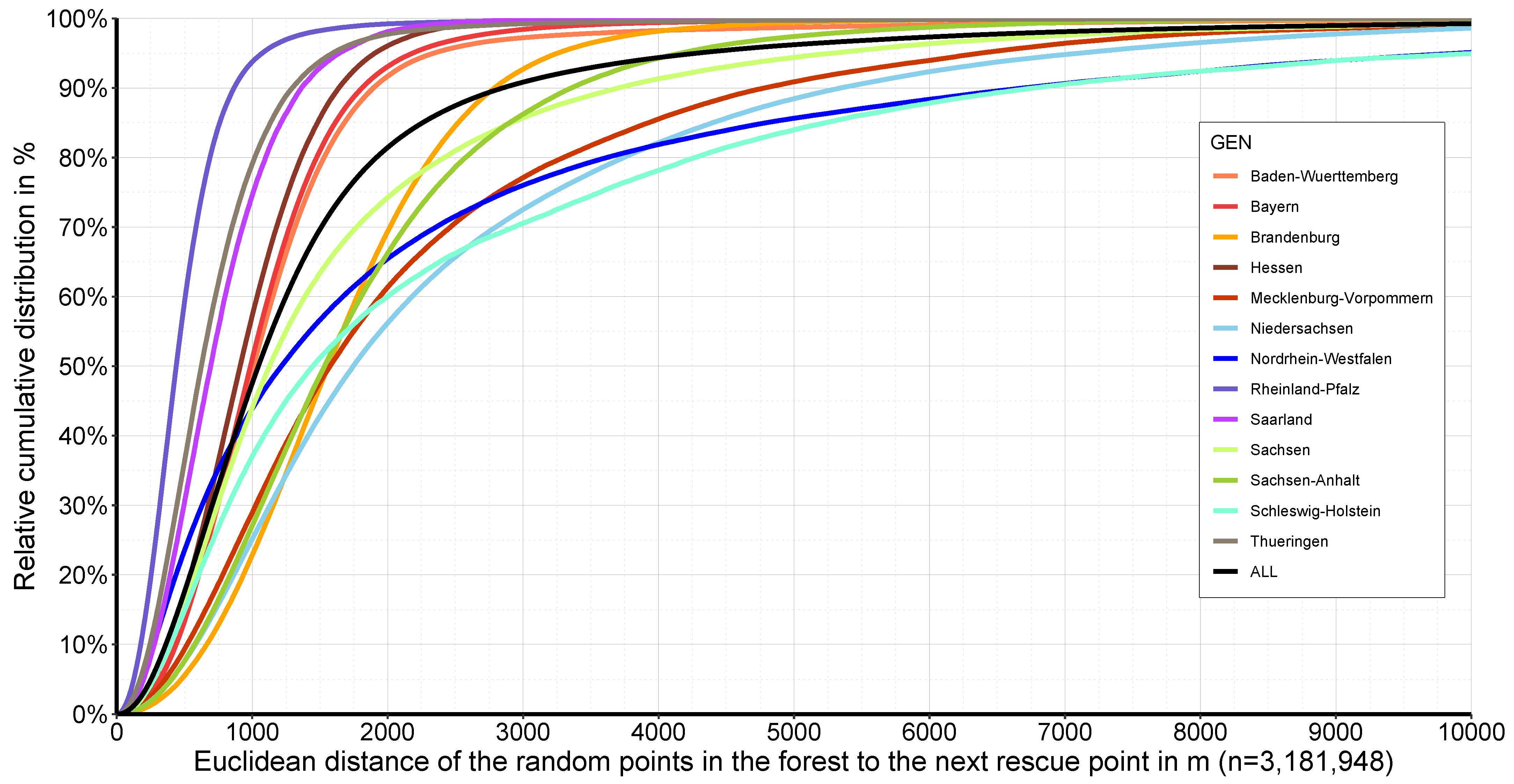
Figure 6 illustrates the relative cumulative distribution of the Euclidean distance from random points in the forest to the nearest rescue point for the different federal states and the federal level.
The steeper the curves, the shorter the potential distance to the nearest rescue meeting point. If the curve is flat, it can be assumed that the density of rescue points is lower.
For Germany, in 50% of all forest places and potential accident sites, the forest rescue point is within a direct distance of less than 1045 m, but the variation in the federal states ranges from 439 m (Rhineland-Palatinate) to 1745 m (Lower Saxony). When considering the 95% quantile of the data, there is significant variation, between 1073 m (Rhineland-Palatinate) and 10,044 m (Schleswig-Holstein) with respect to 4278 m for Germany.
3.2.2. Euclidean Distance to the Nearest NavLog Road
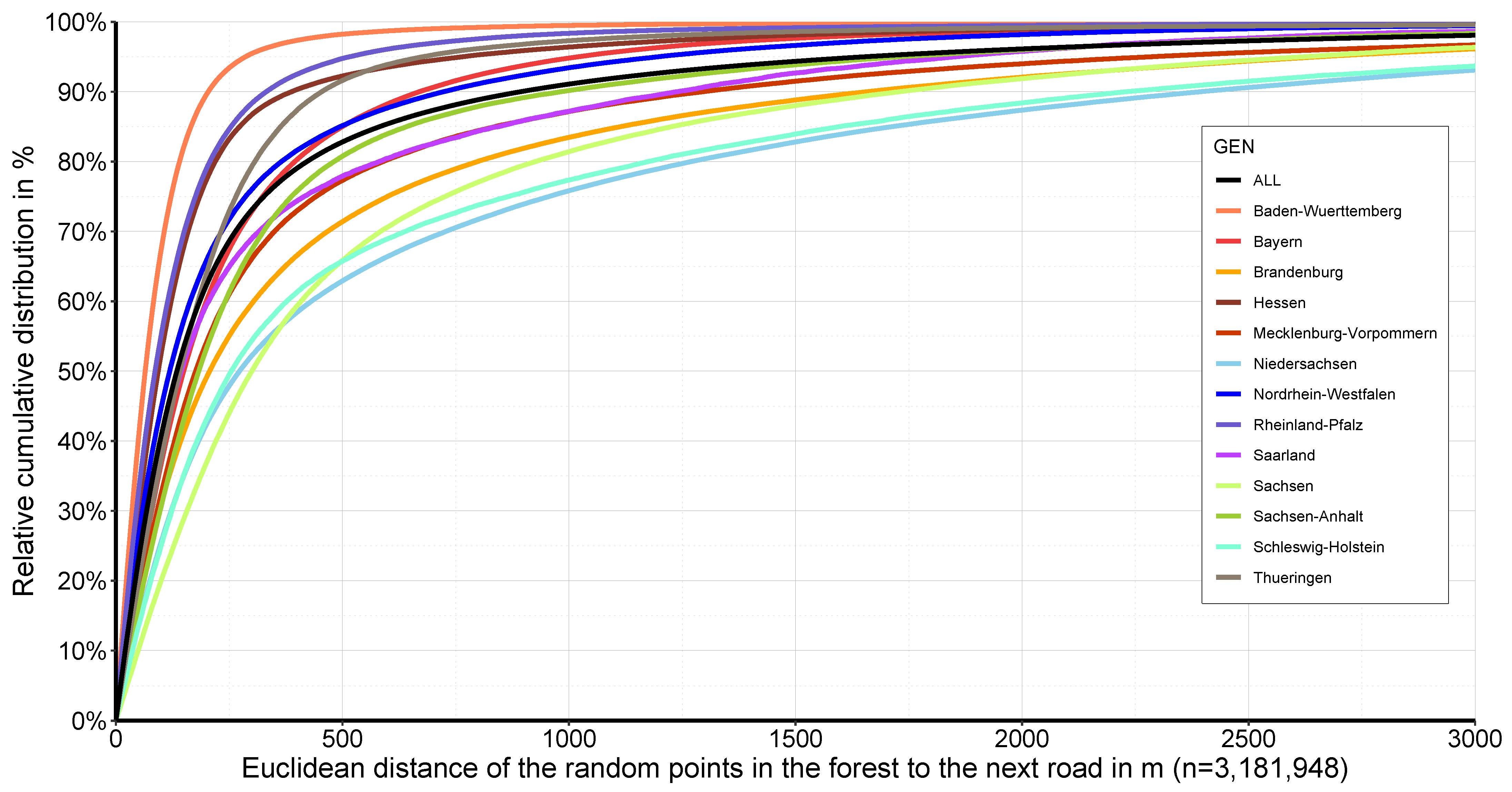
A more realistic event is that an injured person is transported to the nearest road to possibly be loaded into an ambulance. Therefore, Figure 7 illustrates the relative cumulative distribution of the Euclidean distance from random points in the forest to the nearest NavLog road for the different federal states and the federal level. The calculation is again based on the 3,181,948 randomised points in the forest.
For Germany, in 50% of all forest places and the potential accident sites, the nearest NavLog road or public road is within a direct distance of less than 135 m, but the variation in the federal states range from 65 m (Baden-Württemberg) to 956 m (Lower Saxony). When considering the 95% quantile of the data, there is significant variation, between 286 m (Baden-Württemberg) and 3500 m (Lower Saxony) with respect to 1652 m for Germany.
Baden-Württemberg has a very high density of forest roads () and a high percentage of forestation (38%). Therefore, the average distance to the nearest NavLog road is the shortest. On the other hand, Lower Saxony has a very low density of roads and a low percentage of forestation (22%). Therefore, the average distance to the nearest NavLog road is relatively high.
When comparing the order of the federal states with Figure 6, a relatively similar picture emerges, but the order is partially reversed. Therefore, a clear difference can be seen between indices ‘Euclidean distance to the nearest rescue point’ and ‘Euclidean distance to the nearest NavLog road’.
3.2.3. Transport Distance to the Nearest Rescue Point
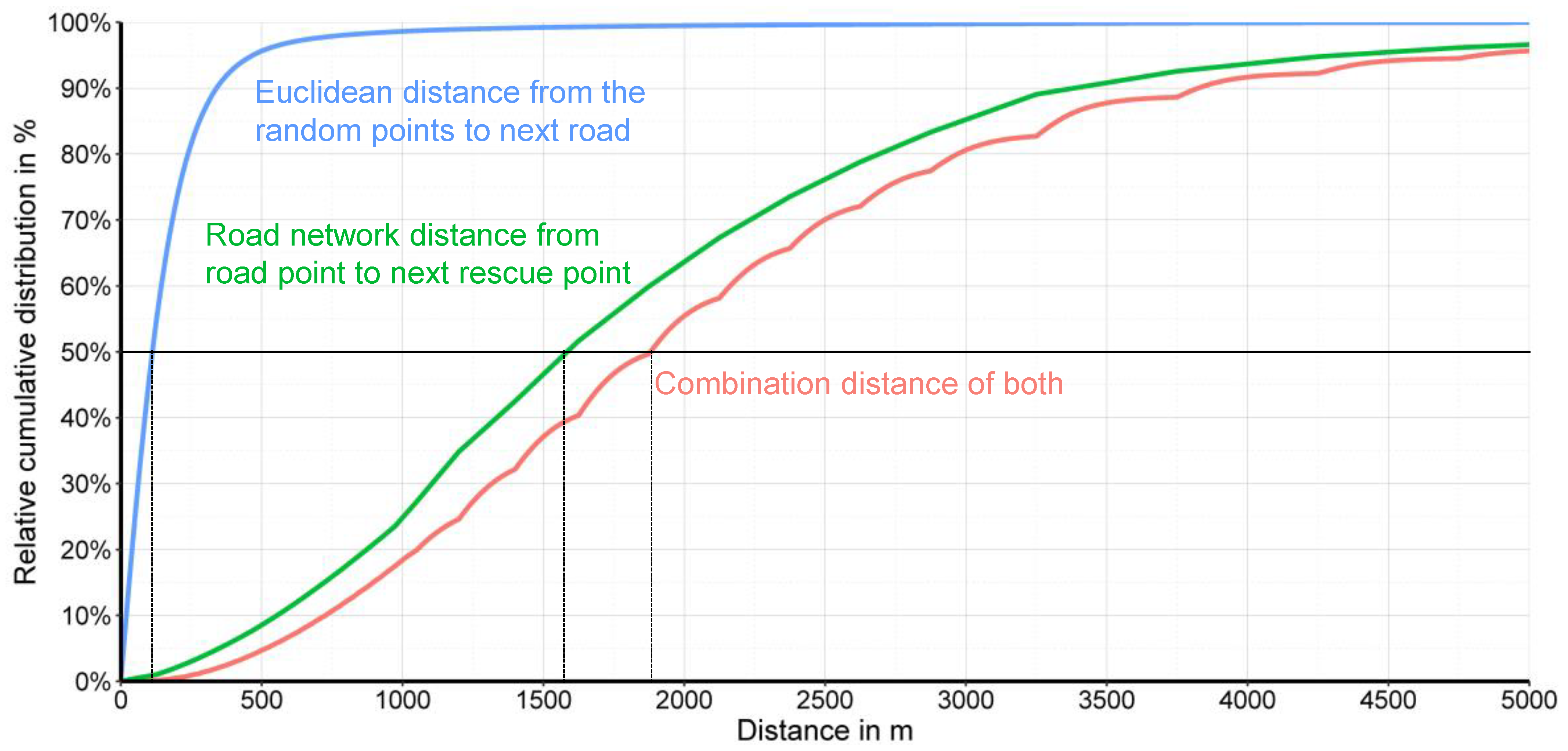
Figure 8 shows an example for calculating the transport distances. This is composed of two components per RSP: the relative cumulative distribution of the Euclidean distance from random points to the nearest road (blue line) and the road network distances from a road point to the nearest rescue point (green line). Additionally, Figure 8 shows the pairwise combination of both (red line) as an example for a part of the federal state Bavaria.
This indicator was calculated for the 25% quantile: 1208 m (50% quantile: 1880 m; 75% quantile: 2718 m; 95% quantile: 4823 m) as the transport distance to the nearest rescue point. It is apparent that the part travelled on the road is clearly dominant.
3.3. Geometrical Densities
3.3.1. Spatial Point Density
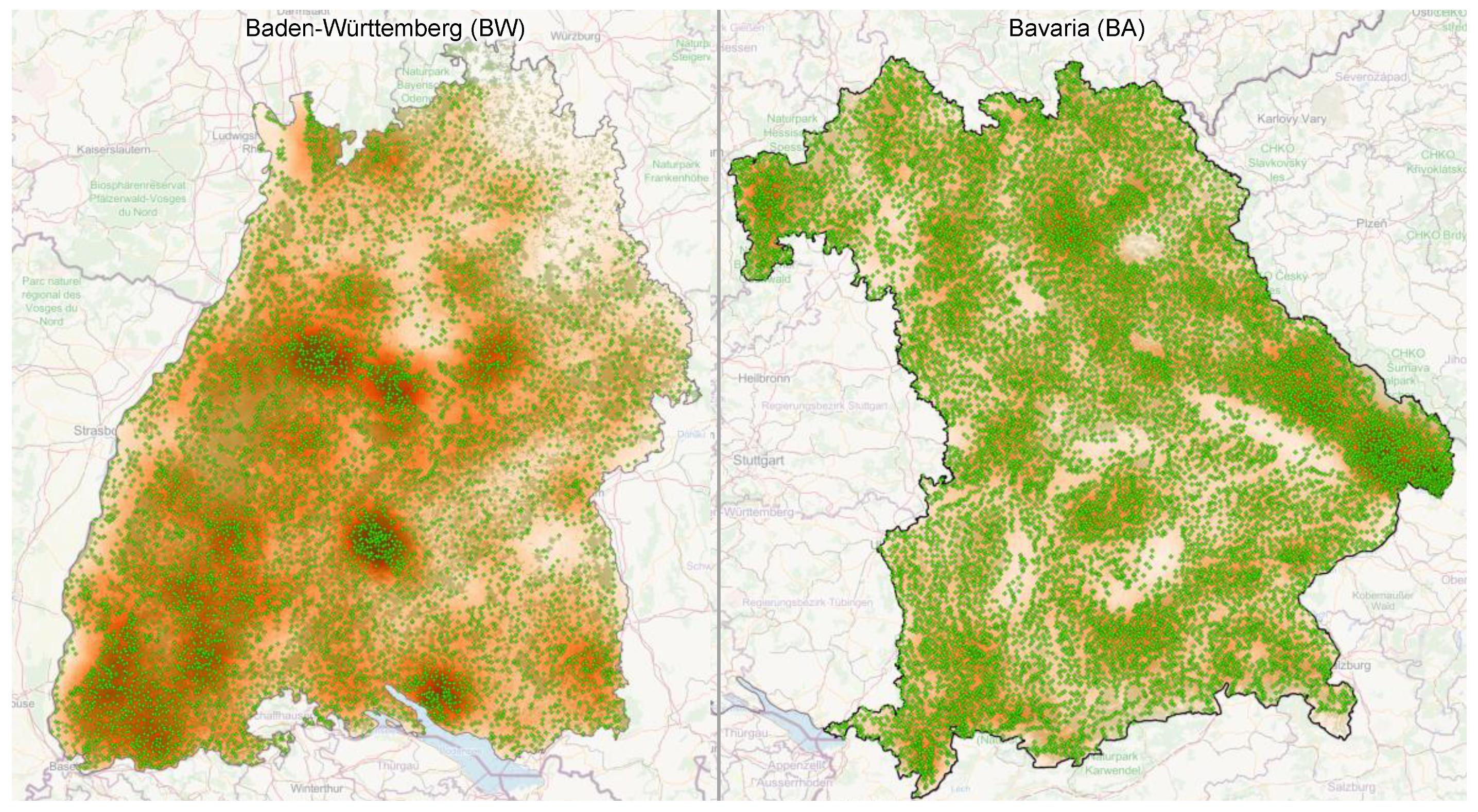
Figure 9 shows existing rescue points and the difference in the spatial distribution and density of the rescue points and the calculated point density as an example for two German federal states: Baden-Würtemberg and Bavaria. The number of rescue points shown are 6727 for Baden-Würtemberg and 12,863 rescue points for Bavaria.
It is clear that the different regions are affected very differently, which leads to different densities. This is also related to various influencing factors, such as the type of forest ownership, forest distribution, orography and, above all, the development of the forests in the region. Large parts of the low (<1000 m) and high (1000–3000 m) mountains are not as densely developed as parts of the lowlands. However, low mountain ranges have a higher forest density, and for this reason, a higher density is often found in low mountain ranges than in the rest of the region. Additionally, several high dense areas are mainly concentrated in large forest areas.
The spatial distribution and representation of rescue point densities gives a quick spatial overview and can help to support decisions related to expansion or thinning.
3.3.2. Thiessen Polygons
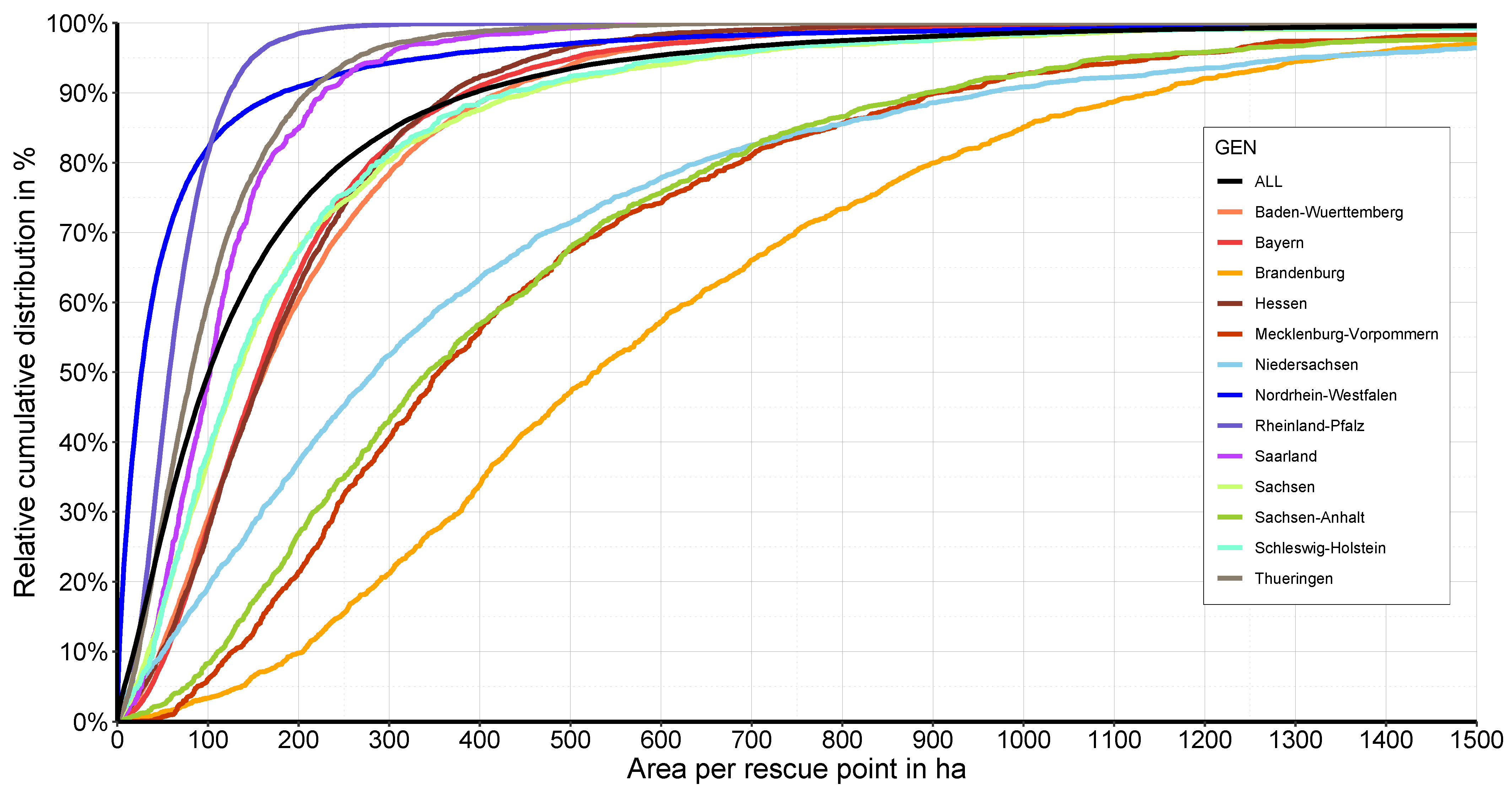
Figure 10 shows the relative cumulative distribution of the Euclidean distance of the related Thiessen polygon forest area per rescue point for the different federal states and the federal level.
The individual federal states show a very different situation. For Germany, 50% of the rescue points are responsible for 101.2 ha forest land, but the variation in the federal states range from 26 ha (North Rhine-Westphalia) to 530 ha (Brandenburg). When considering the 95% quantile of the data, there is significant variation, between 148 ha (Rhineland-Palatinate) to 1334 m (Brandenburg) with respect to 567 ha for Germany.
Thus, three groups of federal states emerge. Five federal states (Baden-Württemberg, Bavaria, Hesse, Saxony, Schleswig-Holstein) show a course of relative cumulative frequencies similar to the average for Germany. Four federal states (North Rhine-Westphalia, Rhineland-Palatinate, Saarland, Thuringia) have significantly lower Thiessen polygon areas, i.e., a denser network of rescue points. Four federal states (Brandenburg, Lower Saxony, Mecklenburg Western Pomerania, Saxony-Anhalt) have significantly larger Thiessen polygon areas, i.e., a less dense network of rescue points.
3.3.3. Euclidean Distance from a Rescue Point to the Nearest Forest
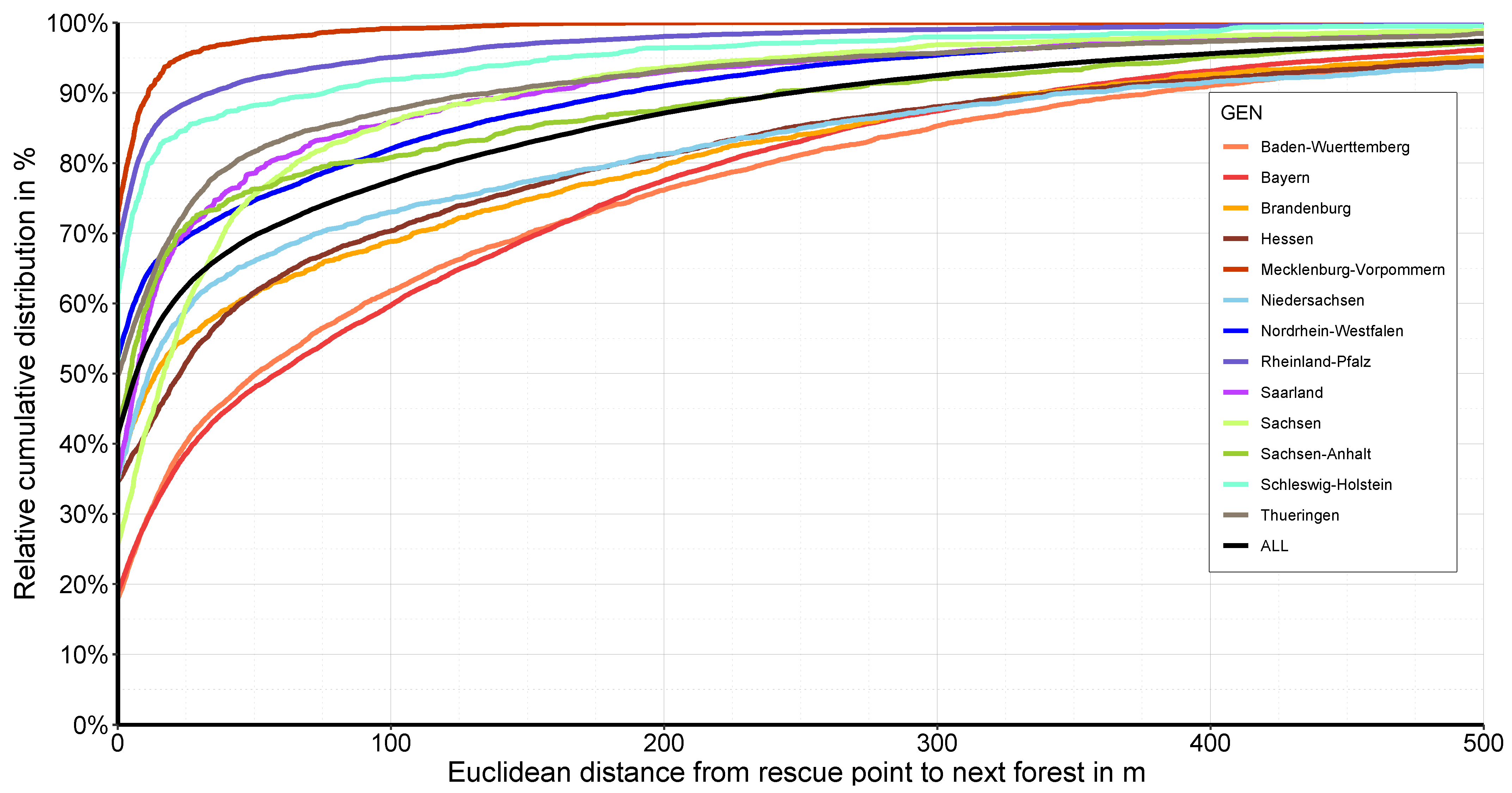
Figure 11 shows the relative cumulative distribution of the Euclidean distance from a rescue point to the nearest forest for the different federal states and the federal level. This is an indicator of how many points are located within the forest and how many are outside.
The individual federal states show a very different situation. The different strategies of how the rescue points are created are visible. In Bavaria, for example, only 18% of the rescue points in Germany are located directly in the forest (geometric intersection). In Mecklenburg Western Pomerania, on the other hand, 73.1% and 41.4% are located directly in the forest. However, many of the points are placed in the immediate neighbourhood of the forest. Thus, in Bavaria, 48% of the rescue points are within a distance of 50 m (59% within 100 m) to the nearest forest, in Mecklenburg Western Pomerania 97.6% are within 50 m (99.2% within 100 m), and considering the whole of Germany 69.6% are within 50 m (77.4% within 100 m).
3.3.4. Euclidean Distance from One Rescue Point to the Next Rescue Point
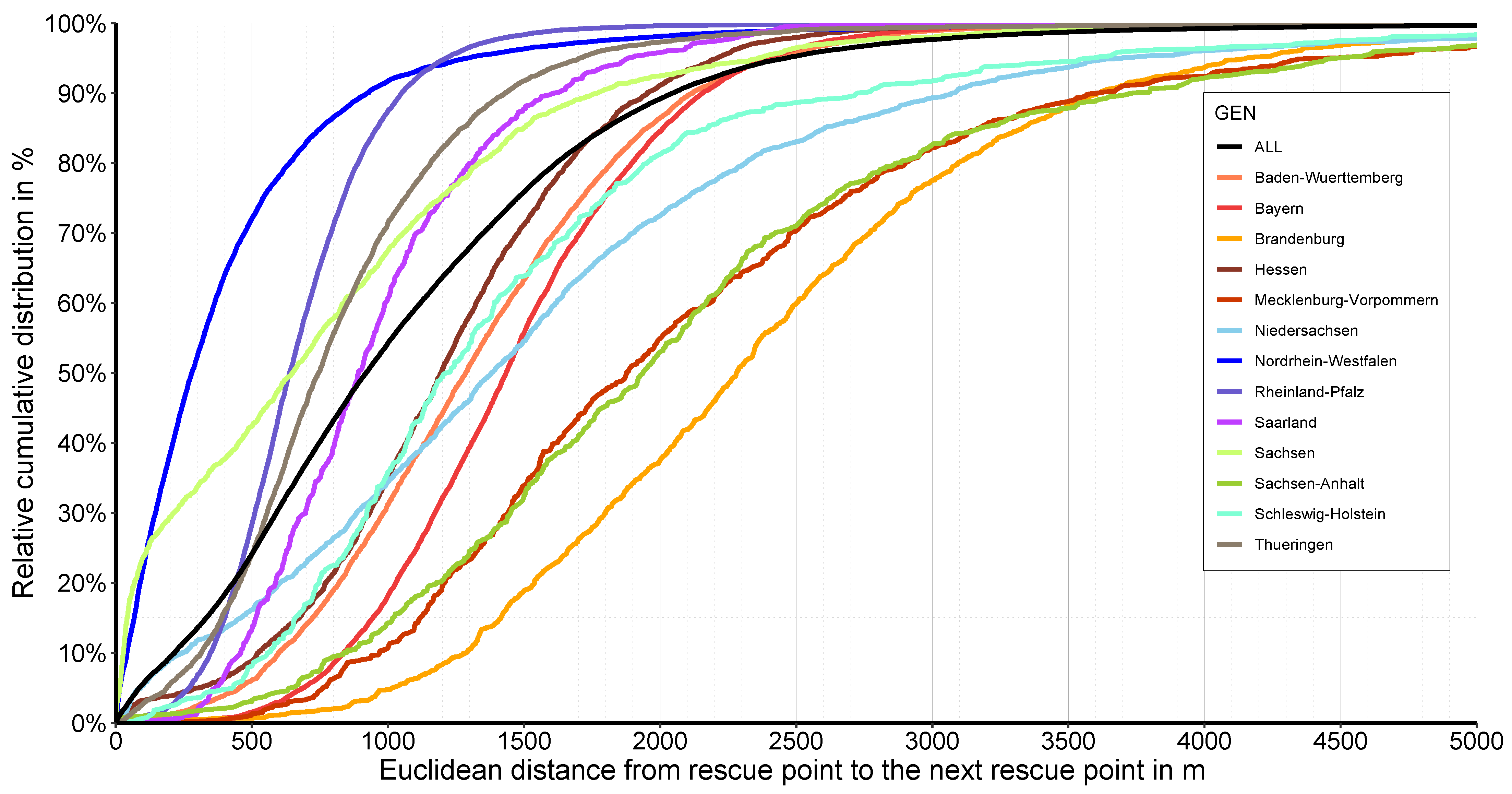
Figure 12 shows the relative cumulative distribution of the Euclidean distance from one rescue point to the next rescue point for the different federal states and the federal level. This is an index of the density that indicates the distance the rescue points are located from each other.
Here, too, the differences between the individual federal states can be seen very clearly, especially since the percentage of forest area influences this index. For Germany, 50% of the rescue points are within a distance of 919 m from the nearest rescue point, but the variation in the federal states ranges from 279 m (North Rhine-Westphalia) to 2281 m (Brandenburg). When considering the 95% quantile of the data, there is significant variation, between 1213 m (Rhineland-Palatinate) to 4485 m (Saxony-Anhalt) with respective to 2460 m for Germany.
Additionally, Table 3 summarises the most important indicators for the federal states numerically once again.
4. Discussion
Due to soil conservation and certification, the current trend is towards a predominantly 40 m skid road system in Germany [35,36]. Therefore, motor manual work in the forest is not likely to decrease and will continue to be necessary. In addition, the working conditions are not becoming less dangerous due to the ongoing calamities and effects of climate change, e.g., increase in dry branches. In the future, there will also be a need for a working rescue concept and system.
In the present study, numerous indices for the assessment of rescue points were developed and applied. These included the groups of standard indices, mean rescue distances, and geometrical density.
Primarily, federal states were compared with each other. This is a rough benchmark for the strategic assessment of rescue point density. The statements are limited for local decisions. For more detailed statements, the indices should be applied to individual regions.
4.1. Standard Indices and Point Density
The standard indices and the point density, as shown in Figure 5 and Table 2, provide a quick overview of the situation in the individual territories. These are summary data on large areas and therefore have only limited significance for local realities. However, they do provide a first indication, and these standard indices are often given in the literature.
4.2. Mean Rescue Distances
The primary consideration is time and the route to the injured person in rescue operations. For this case, a numerical approach was chosen, and ten million points were randomly placed within the area of Germany representing 3,189,447 RSPs within forest areas. The ten million RSPs correspond to an average of one RSP per 3.58 ha. This number of RSPs, distributed over the whole of Germany, and the numerical approach seems to be representative and informative, and cover the entire forest evenly.
In the present study, three different indices for the determination of the rescue distances were calculated: the Euclidean distance to the nearest rescue point and then to the nearest NavLog or public road as well as the composite transport distance to the nearest rescue point.
Even though all three rescue distance indices provided different results (compare Figure 6, Figure 7 and Figure 8 and Table 3), the tendencies are similar, and all three can be used for optimisation strategies. The distances to the nearest rescue point or the nearest road can be determined very simply, e.g., with a near-geoprocessing function. The calculation of ’Transport distance to the nearest rescue point’, on the other hand, is much more complicated, especially since a seamless routable network between navigable NavLog data and a public road network is yet to be established. This is not trivial if the quality requirements are high. The use of OSM data is only suitable for this purpose to a limited extent, as no quality-checked road type and road trafficability data are available in the forest.
The index ‘Transport distance to the nearest rescue point’ provides a solution comprising the shortest distance to a forest road and then the shortest distance from this point to the nearest rescue point. However, this is not necessarily the shortest total transport distance to the nearest rescue point, such as, for example, if the distance to the second nearest NavLog road is further away, the road distance to the nearest rescue point may be shorter and more convenient. In reality, knowing the location, it might be possible to take this alternative route. This is a weakness of the index that could be minimised with more complex algorithms than those used. In addition, actual travel times of emergency vehicles could be calculated. There is still a need for further research here.
The planar Euclidean distance was determined for each of the indices. Due to the small distance and the large variation in the results, a more precise geodetic or relief distance was not used.
The primary consideration is time and the route to the injured person in rescue operations. It is assumed that the most important thing is that a qualified assisting person reaches the injured person. The transport to the forest road and out of the forest and the distance to the nearest hospital are of no or only minor importance. However, the available systems can also help here and, for example, simplify travel or shorten travel times.
4.3. Geometrical Densities
The geometrical densities provide a benchmark for the density and spatial distribution of the rescue points. In the present study, four different geometrical densities indices were calculated: spatial point density, the Thiessen polygons for every rescue point, and the two Euclidean distances from one rescue point to its nearest rescue point and the nearest forest.
Even though all three rescue distance indices provide different results (compare Figure 9, Figure 10, Figure 11 and Figure 12 and Table 3), all can be used for rescue point optimisation strategies and decisions.
The index of the Euclidean distance from one rescue point to the next rescue point only gives an average value and does not take local phenomena into account. For example, in practice, rescue points are euclidically close to each other, but in reality, they are separated by motorways, railway lines, or rivers. The driving distance between these two close points can be considerable. However, it would be fatal if the ambulance arrived on precisely the wrong side. Therefore, good positions, high-quality maps, navigation, and human pilots are conducive in these emergencies.
This is a weak point of the index ’Euclidean distance from one rescue point to the next rescue point’, which mainly indicates a rough scale level for decisions. Nevertheless, essential parameters and distributions can be derived from this index, mainly when applied at the local level.
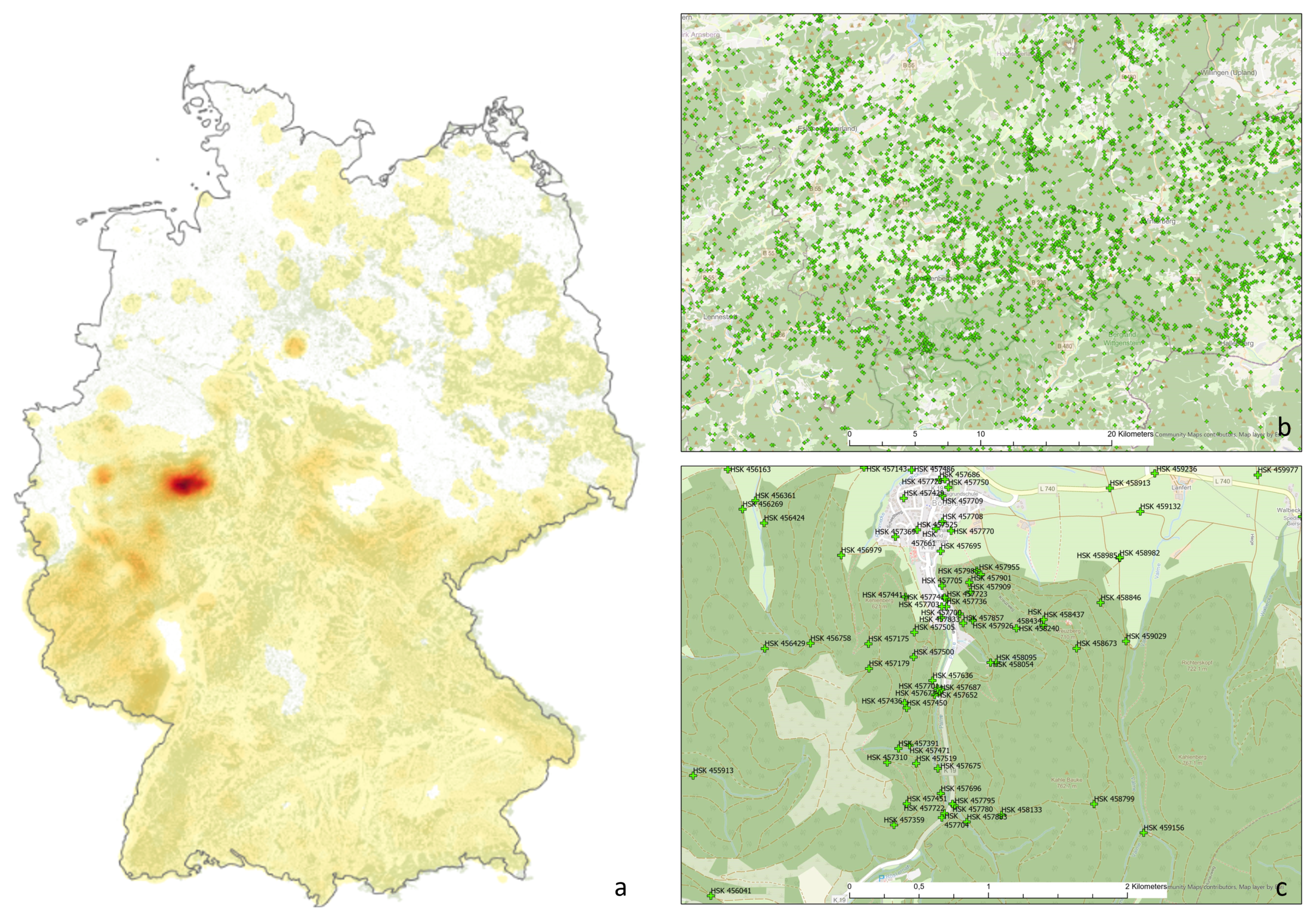
Regional institutions, often the forest owners or their representatives, are responsible for the designation of the rescue meeting points. In this context, regionally interesting characteristics and interpretations occur, which impact the various indices, especially when viewed on a trans-regional level. Figure 13 shows an extreme example in Germany. The density map of rescue points in Germany clearly shows a conceptualisation of rescue points (Figure 13a). Figure 13b,c show the rescue points on the map of this area at two different zoom levels, and the high density is evident.
The reason for the extremely high density is that the Sauerland-Tourismus association, for example, has created all benches and signposts as rescue points when marking hiking trails. This results in numerous rescue points occurring within a minimal area. This, of course, strongly influences the determined indices, but they still reflect reality. Many of these rescue points are within direct sight of each other. Whether this high density is sensible, even though it deviates strongly from the current guidelines [5,20], will not be discussed further at this point. However, these exceptions influence the density distribution and thus represent a weak point of the density indices when considering larger areas.
The historically established different rescue point systems, which have only been attempted to be harmonised since 2013, together with the different federal legal and political structures lead to different specifications of the systems and strongly influence the indices. This can be seen very clearly in the index ’Euclidean distance from a rescue point to the nearest forest’ (Figure 11). While in Mecklenburg Western Pomerania, most of the rescue points are located directly in the forest (73.1%), in Bavaria only 18% are located in the forest but are relatively close to the forest (59% within 100 m). The index does show differences between the regions, but due to the different interpretations of the system, no direct evaluation can be carried out based on this index.
Whether the existing rescue point system is sufficient must finally be made regionally or locally. The developed indices can help in this decision. In addition, other factors such as regional characteristics, annual cut, population and tourist density in the region, and other regional parameters can be considered.
For this study, the 63,718 official rescue points collected by the KWF where used. Nevertheless, there are additional rescue points in some regions that have not been reported. Mainly, this is because they do not fulfil some of the prerequisites, such as having the required mobile phone reception. One example is that, similar to Voralberg, the Black Forest Association has geolocated each of its 15,000 signposts, and these have a unique identifier with the location name, which is known to the control centres [28,37].
4.4. Alternative Concepts and Additional Assistance
Currently, a new development called the mobile phone emergency location-based service or Advanced Mobile Location (AML) is available area-wide. In the case of an emergency call, it automatically sends the ‘best available geolocation’ to emergency services, with the achievable GNSS positioning accuracy of smartphones in the forest [38]. Thus, the rescue services know the coordinates of the caller.
Currently, Android (Google) and iOS (Apple) are AML-supporting operating systems. The AML service is integrated from Android version 4 or Apple iOS from version 13.3. The system is available in 25 countries around the world [39]. From March 2022, all smartphones sold in the EU single market must be equipped with AML [40]. The AML endpoint in Germany is redundantly located at the Berlin Fire Department and at the Integrated Control Centre Freiburg—Breisgau-Hochschwarzwald [41]. However, not all German control centres are AML-capable yet [41].
Combination with the concept of the first responder, as was tested in the region of Freiburg, provides an opportunity for help to reach the casualty much more quickly. First responder volunteers are well-trained first aiders from the vicinity who are informed by the Smartphone Alerting Systems (SAS) on the scene more quickly in an emergency, which bridges the therapy-free time until the arrival of the emergency doctor or ambulance service [42].
Therefore, the question is whether we still need the system of rescue points in the forest when using AML and first responders. Using the AML system, the emergency services have a position in the forest, but this does not automatically mean that the rescue chain in the forest works reliably. Usually, they have less information about the way they have to take, obstacles on the way in and through the forest. Additionally, mobile reception at the accident site is also required. A combination of both will be helpful in the future, maybe with fewer rescue points. In any case, the indices to evaluate this are available.
Insufficient mobile phone network coverage is often a barrier to rescue operations in the forest. Research is currently being conducted on automatically ascending emergency drones as a mobile phone repeater system to minimise this problem [43].
Additional information at some rescue points include information about nearby landing locations. Such helispots are implemented in several regions [44]. If these helispots are not available, helicopter hoist operations (HHOs) are an option for rescue in difficult- or impossible-to-access areas [45].
An efficient rescue chain always depends on the people and processes involved. Therefore, forest workers should regularly receive special training to reduce the accident rate and receive training for emergency procedures. However, there is a noticeable tendency that the willingness for such training is decreasing [8,16,46].
Research is also being undertaken into a variety of additional helpers. For example, in an emergency, an ambulance drone (deficopter) can autonomously bring a required defibrillator to the injured person if its position is known. This also applies to other required emergency medical equipment. Such a drone operation system can be beneficial in combination with the first responder approach [42,47].
5. Conclusions and Outlook
The Permanent German Forest Rescue Point System may help reduce the consequences of an accident, mainly through quality information and speeding up the rescue process [2,3,4,20,27]. This study aimed to derive possible indicators from evaluating the spatial distribution and density of the existing rescue points. Numerous indices for spatial assessment were identified and calculated. Future research should aim at assessing these indicators on a local scale and determining which expressions of these indicators are meaningful along with conducting practical tests. There is an additional international need for the expansion of an advanced system for rescue in the event of accidents in forestry, and this will undoubtedly be pursued further in the coming years [30,31,48,49].
Funding
The article processing charge was funded by the Baden-Württemberg Ministry of Science, Research and Art and the University of Freiburg in the funding programme Open Access Publishing.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The data that support the findings of this study are available from the corresponding author upon reasonable request.
Conflicts of Interest
The author declares that there are no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Sozialversicherung für Landwirtschaft, Rückgang der Unfallzahlen bei der Waldarbeit [in German: Decrease in the Number of Accidents During Forest Work]. Available online: https://cdn.svlfg.de/fiona8-blobs/public/svlfgonpremiseproduction/cd002202473640d7/946e25adffb3/pm-unfallzahlen-forst-20210722.pdf (accessed on 14 December 2021).
- Schnitzler, S. Konzeption und Realisierung Einer Webbasierten Rettungspunktekarte Forst [in German: Conception and Realisation of a Web-Based Forest Rescue Point Map]. Master’s Thesis, Hochschule Mainz, Mainz, Germany, 2011. [Google Scholar]
- Schmidt-Baum, T. Konzepte für Rettungsketten in Waldarbeitssystemen [in German, Concepts for Rescue Chains in Forestry Systems]; Cuvillier Verlag: Göttingen, Germany, 2008; 282p. [Google Scholar]
- Vogt, M. Rettung und Hilfeleistung bei Unfällen im Wald-Vergleich des Baden-Badener Rettungssystems für Waldeinsätze mit dem Rettungspunktsystem [in German: Rescue and Assistance in Case of Accidents in the Forest-Comparison of the Baden-Baden Rescue System for Forest Operations with the Rescue Point System]. Master’s thesis, University Freiburg, Freiburg im Breisgau, Germany, 2017. [Google Scholar]
- Kuratorium für Waldarbeit und Forsttechnik e.V. Ausweisen forstlicher Rettungspunkte—Praxisleitfaden für Waldbesitzer [in German: Identifying Forest Rescue Points—Practical Guide for Forest Owners]. 2017. Available online: https://kwf2020.kwf-online.de/wp-content/uploads/2021/01/A5_Broschuere_kwf_Rettungspunkte.pdf (accessed on 14 November 2021).
- Gesetz über die Durchführung von Maßnahmen des Arbeitsschutzes zur Verbesserung der Sicherheit und des Gesundheitsschutzes der Beschäftigten bei der Arbeit—Arbeitsschutzgesetz—ArbSchG § 10 Erste Hilfe und sonstige Notfallmaßnahmen [in German: Act on the Implementation of Occupational Health and Safety Measures to Improve the Safety and Health Protection of Employees at Work—Occupational Health and Safety Act—§ 10 First aid and Other Emergency Measures]. 2021. Available online: https://www.gesetze-im-internet.de/arbschg/ (accessed on 27 December 2021).
- Sozialversicherung für Landwirtschaft, Forsten und Gartenbau. Unfallverhütungsvorschrift Forsten (VSG 4.3) [in German: Forestry Accident Prevention Regulation]. Available online: https://cdn.svlfg.de/fiona8-blobs/public/svlfgonpremiseproduction/5eef1437acda7060/ce69122817a3/vsg4_3-forsten.pdf (accessed on 22 January 2022).
- van Hensbergen, H.; Cedergren, J. Forest-Related Disasters—Three Case Studies and Lessons for Management of Extreme Events. ForestryWorking Paper No. 17., Rome, FAO. 2020. Available online: https://www.fao.org/3/cb0686en/cb0686en.pdf (accessed on 3 January 2022). [CrossRef]
- Blennow, K.; Persson, E. Societal impacts of storm damage. In Living with Storm Damage to Forests; European Forest Institute: Joensuu, Finland, 2013; pp. 70–77. [Google Scholar]
- Siebtes Buch Sozialgesetzbuch—Gesetzliche Unfallversicherung—§ 193 Pflicht zur Anzeige eines Versicherungsfalls durch die Unternehmer [in German: Seventh Book of the Social Law Code—Statutory Accident Insurance—Obligation to notify an insured event by the entrepreneurs]. 1996. SGBVII §193. Available online: https://www.gesetze-im-internet.de/sgb_7/ (accessed on 30 December 2021).
- Unfallstatistik [in German: Accident Statistics]. Available online: https://unfallzahlen.kwf-online.de (accessed on 14 November 2021).
- Tsioras, P.; Rottensteiner, C.; Stampfer, K. Analysis of Accidents During Cable Yarding Operations in Austria. Croat. J. For. Eng. 2011, 32, 549–561. [Google Scholar]
- Bentley, T.; Parker, R.; Ashby, L. Understanding felling safety in the New Zealand forest industry. Appl. Ergon. 2005, 36, 165–175. [Google Scholar] [CrossRef] [PubMed]
- Jankovský, M.; Allman, M.; Allmanová, Z. What Are the Occupational Risks in Forestry? Results of a Long-Term Study in Slovakia. Int. J. Environ. Res. Public Health 2019, 16, 4931. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wettmann, O.; Hartmann, H.; Sonderegger, H.; Moser, U. Notfallorganisation. Schnelle Rettung ist lebenswichtig [in German: Emergency organisation. Rapid rescue is vital]. Wald Holz 2010, 91, 29–31. [Google Scholar]
- Sauter, U.H.; Bonadio, S.; Kaulfuß, S.; Weinbrenner, H.; Bethmann, S.; Goedeke, A.; Schraml, U.; Hartebrodt, C. Arbeitssicherheit bei der Waldarbeit [in German: Occupational Safety during Forest Work]; Technical Report 102; Fakultät für Forst- und Umweltwissenschaften der Universität Freiburg und Forstliche Versuchs- und Forschungsanstalt Baden-Württemberg: Freiburg im Breisgau, Germany; ISSN 1436-1566.
- Gesetz über den Rettungsdienst (Rettungsdienstgesetz—RDG) Baden-Württemberg—§ 3 Planung[in German: Rescue Service Act Baden-Württemberg—§ 3 Planning]. 2010. Available online: https://www.landesrecht-bw.de/jportal/?quelle=jlink&query=RettDG+BW&psml=bsbawueprod.psml&max=true&aiz=true (accessed on 4 January 2022).
- Rettungsdienstplan 2014 Baden-Württemberg [in German: Rescue Service Plan 2014 Baden-Württemberg]. Az.: 4-5461.2. Available online: https://im.baden-wuerttemberg.de/fileadmin/redaktion/m-im/intern/dateien/pdf/Rettungsdienstplan_2014_.pdf (accessed on 22 January 2022).
- Vogt, M.; Wilhelm, A. Das Baden-Badener Rettungssystem Wald [in German: The Baden-Baden Forest Rescue System]. AFZ Der Wald 2010, 21, 44–47. [Google Scholar] [CrossRef]
- Wolf, M. Rettungskette Forst (Bayern)—Handbuch der Bayerischen Forstverwaltungy [in German: Forest Rescue Chain (Bavaria)—Handbook of the Bavarian Forestry Administration]; Technical Report; Bavarian State Ministry of Food, Agriculture and Forestry: Munich, Germany, 2015. [Google Scholar]
- Sichere Waldarbeit Rettungskette Forst [in German: Safe Forest Work Rescue Chain Forest]. Available online: https://www.stmelf.bayern.de/wald/waldbesitzer/038467/index.php (accessed on 14 January 2021).
- Rettungspunkte. Available online: https://kwf2020.kwf-online.de/rettungspunkte/ (accessed on 14 November 2021).
- Stöcker, M.; Raape, U.; Itzenblitz, C.v.; Hauck, B. Navigation abseits öffentlicher Strassen—Projektvorhaben zur deutschlandweiten Erfassung von Waldwegen zur Optimierung der forstlichen Logistikkette. In Integration und Datensicherheit—Anforderungen, Konflikte und Perspektiven, Referate der 25. GIL Jahrestagung; Schiefer, G., Wagner, P., Morgenstern, M., Rickert, U., Eds.; Gesellschaft für Informatik e.V.: Bonn, Germany, 2004; pp. 307–310. [Google Scholar]
- Frost, M.; Hölldorfer, B.; Müller, M.; Purfürst, T. Digitale Infrastruktur mit NavLog bei den BaySF [in German: Digital infrastructure with NavLog at BaySF]. AFZ Der Wald 2015, 70, 13–15. [Google Scholar]
- Purfürst, T. Befahrung von Waldböden: Ursache, Wirkung, Lokalisation, Digitale Dokumentation und Datenmanagement [in German, Driving on Forest Soils: Cause, Effect, Localisation, Digital Documentation and Data Management]. Habilitation, Technische Universität Dresden, Dresden, German, 2019; 434p. [Google Scholar]
- Flegel, D. Webbasierte Erholungskarte mit Darstellung von Rettungspunkten [in German: Web-Based Recreation Map with Representation of Rescue Points]. Master’s Thesis, Hochschule Anhalt, Dessau, Germany, 2009. [Google Scholar]
- SOPPA, R. Rettungsübung im Forst. Satellitengestützter Rettungseinsatz [in German: Rescue exercise in the forest. Satellite-based rescue operation]. AFZ-Der Wald 2005, 734–735. [Google Scholar]
- Schrempf, K. Vergleich Verschiedener Rettungspunktsysteme im Wald und Erstellung eines Netz-Konzeptes für den Schönbuch [in German: Comparison of Different Rescue Point Systems in the Forest and Creation of a Network Concept for Schönbuch]. Master’s Thesis, Hochschule für Forstwirtschaft Rottenburg, Rottenburg am Neckar, Germany, 2016. [Google Scholar]
- Available online: https://www.redningsnummer.dk/ (accessed on 14 November 2021).
- Ryba, D. Ministerstvo Vnitra-Generální ředitelstvíHasičského záchranného sboru České republiky [in Czech: Methodological Aid for the Establishment, Location and Registration of Rescue Points on the Territory of the Czech Republic]; Technical Report; Ministry of the Interior-Directorate General of the Fire Brigade of the Czech Republic: Prague, Czech Republic, 2015. [Google Scholar]
- Available online: https://lesycr.cz/tiskova-zprava/ve-statnich-lesich-bude-od-rijna-2-500-bodu-zachrany/ (accessed on 4 January 2022).
- Wikipedie. Bod záchrany—Wikipedie: Otevřená Encyklopedie. 2021. Available online: https://cs.wikipedia.org/w/index.php?title=Bod_z%C3%A1chrany&oldid=20241938 (accessed on 30 December 2021).
- How Create Random Points Works. Available online: https://pro.arcgis.com/en/pro-app/latest/tool-reference/data-management/how-create-random-points-works.htm (accessed on 14 November 2021).
- Silverman, B.W. Density Estimation for Statistics and Data Analysis; Chapman and Hall: New York, NY, USA, 1986. [Google Scholar]
- PEFC. PEFC-Standards für Nachhaltige Waldbewirtschaftung—Normatives Dokument PEFC D 1002-1:2020 [in German: PEFC Standards for Sustainable Forest Management]. Available online: https://pefc.de/media/filer_public/cf/02/cf023700-11de-47e5-88e8-224cd390070e/pefc-standards_grafikversion_online_stand082021.pdf (accessed on 3 January 2022).
- FSC. Deutscher FSC-Standards 3-0 [in German: German FSC Standard]. Available online: https://www.fsc-deutschland.de/download.fsc-waldstandard-3-0.a-1208.pdf (accessed on 3 January 2022).
- Schwarzwaldverein. Wegweiser Sind Rettungspunkte [in German: Signposts are Rescue Points]. Available online: https://www.schwarzwaldverein.de/schwarzwald/wanderwege/wegweiser-sind-rettungspunkte/ (accessed on 3 January 2022).
- Purfürst, T. Evaluation of Static GNSS Positioning Accuracy using Single-, Dual-, and Tri-Frequency Smartphones in Forest Canopy Environments. Sensors 2022, 12, 435. [Google Scholar]
- Silva, M. Advanced Mobile Location. EENA. Available online: https://eena.org/our-work/eena-specialfocus/advanced-mobile-location (accessed on 3 January 2022).
- Commision Delegated Regulaton (EU) 2019/320. Available online: https://eur-lex.europa.eu/eli/reg_del/2019/320/oj (accessed on 4 January 2022).
- Standortdaten beim Notruf 112 [in German: Location Data When Calling 112]. Available online: https://ils-freiburg.de/standortdaten.php (accessed on 3 January 2022).
- Ganter, J.; Pooth, J.S.; Damjanovic, D.; Trummer, G.; Busch, H.J.; Baldas, K.; Schmitz, D.; Müller, M.P. Association of GPS-Based Logging and Manual Confirmation of the First Responders’ Arrival Time in a Smartphone Alerting System: An Observational Study. Prehospital Emerg. Care 2021, 1–9. [Google Scholar] [CrossRef] [PubMed]
- Höllerl, H. Einsamer Rufer [in German: Lonely caller]. Forst Technik 2021, 33. Available online: https://www.digitalmagazin.de/marken/forsttechnik/hauptheft/2021-10/kwf-Digitalkongress/054_einsame-rufer (accessed on 26 January 2022).
- Balakrishnan, T.; Zawawi, A.; Sapian, M.; Abidin, F.; Ismail, M. Tropical forest rescue extraction points using GIS-based landform classification in pahang national park. Malays. For. 2020, 83, 372–386. [Google Scholar]
- Wilhelm, A.; Lefering, R. Helicopter Hoist Operations in Difficult Nonalpine Terrain. Air Med. J. 2021, 40, 242–250. [Google Scholar] [CrossRef] [PubMed]
- Office, I.L. Safety and Health in Forestry Work—An ILO Code of Practice; International Labour Office: Geneva, Switzerland, 1998; Available online: https://www.ilo.org/wcmsp5/groups/public/---ed_protect/---protrav/---safework/documents/normativeinstrument/wcms_107793.pdf (accessed on 30 December 2021)ISBN 92-2-110826-0.
- Lennartsson, J. Strategic Placement of Ambulance Drones for Delivering Defibrillators to Out of Hospital Cardiac Arrest Victims. Available online: http://urn.kb.se/resolve?urn=urn:nbn:se:kth:diva-170183 (accessed on 3 January 2022).
- Ke-sheng, X. Review of Forestry Safe Production Work in 2007. For. Labour Saf. 2008, 13, 8–12. [Google Scholar]
- XU, K.s.; MA, L.; Zhou, D.Y.; Yang, Y.Q. Necessity of Establishing Emergence Rescue System of Forestry Production Accidents. For. Labour Saf. 2009, 14, 26–30. [Google Scholar]
Figure 1.
Forest occupational accidents in German state forests from 2008 to 2020: (a) occupational accidents per 1,000,000 productive working hours; (b) occupational accidents per 1000 forest workers; (c) occupational accidents; and (d) severity of accidents at work in days of lost service: minor accidents (4–20 days lost), medium accidents (21–45 days lost), severe accidents (46–90 days lost) and very severe accidents (more than 90 days lost; data source: [11]).
Figure 1.
Forest occupational accidents in German state forests from 2008 to 2020: (a) occupational accidents per 1,000,000 productive working hours; (b) occupational accidents per 1000 forest workers; (c) occupational accidents; and (d) severity of accidents at work in days of lost service: minor accidents (4–20 days lost), medium accidents (21–45 days lost), severe accidents (46–90 days lost) and very severe accidents (more than 90 days lost; data source: [11]).

Figure 2.
Examples of the signage for rescue points in the different federal states: Baden-Württemberg (left), Bavaria (middle), and Saxony-Anhalt (right).
Figure 2.
Examples of the signage for rescue points in the different federal states: Baden-Württemberg (left), Bavaria (middle), and Saxony-Anhalt (right).

Figure 3.
(a) Spatial distribution of rescue points (n = 63,718) in Germany. (b) Regional example map of the spatial distribution of rescue points in relation to forest and forest roads. (c) Local example map of the spatial distribution of rescue points (green crosses) in relation to forest (dark green) and forest roads (red/blue lines). Illustration of random sample points (10,000,000 for Germany) inside (green points) and outside (purple points) the forest.
Figure 3.
(a) Spatial distribution of rescue points (n = 63,718) in Germany. (b) Regional example map of the spatial distribution of rescue points in relation to forest and forest roads. (c) Local example map of the spatial distribution of rescue points (green crosses) in relation to forest (dark green) and forest roads (red/blue lines). Illustration of random sample points (10,000,000 for Germany) inside (green points) and outside (purple points) the forest.

Figure 4.
Illustration of the calculation method for two different distance indices: (a) Euclidean distance from random points to the nearest rescue point; (b) Euclidean distance from random points to nearest road combined with the road network distances from a road point to the nearest rescue point.
Figure 4.
Illustration of the calculation method for two different distance indices: (a) Euclidean distance from random points to the nearest rescue point; (b) Euclidean distance from random points to nearest road combined with the road network distances from a road point to the nearest rescue point.

Figure 5.
Density of German rescue points in the forest and forestation percentage per federal states and federal level.
Figure 5.
Density of German rescue points in the forest and forestation percentage per federal states and federal level.

Figure 6.
Relative cumulative distribution of the Euclidean distance from random points in the forest to the nearest rescue point for the different federal states and the federal level.
Figure 6.
Relative cumulative distribution of the Euclidean distance from random points in the forest to the nearest rescue point for the different federal states and the federal level.

Figure 7.
Relative cumulative distribution of the Euclidean distance from random points in the forest to the nearest NavLog or public road for the different federal states and the federal level.
Figure 7.
Relative cumulative distribution of the Euclidean distance from random points in the forest to the nearest NavLog or public road for the different federal states and the federal level.

Figure 8.
Relative cumulative distribution of the Euclidean distance from random points to the nearest road (blue line); road network distances from a road point to the nearest rescue point (green line); and pairwise combination of both (red line) as an example for the federal state Bavaria (n = 364,271).
Figure 8.
Relative cumulative distribution of the Euclidean distance from random points to the nearest road (blue line); road network distances from a road point to the nearest rescue point (green line); and pairwise combination of both (red line) as an example for the federal state Bavaria (n = 364,271).

Figure 9.
Illustration of existing rescue points (green cross) and calculated point density (the browner, the denser) as an example for two German federal states: Baden-Würtemberg (left) and Bavaria (right).
Figure 9.
Illustration of existing rescue points (green cross) and calculated point density (the browner, the denser) as an example for two German federal states: Baden-Würtemberg (left) and Bavaria (right).

Figure 10.
Relative cumulative distribution of the Euclidean distance of the related area per rescue point for the different federal states and the federal level. Area per rescue point in ha calculated using Thiessen polygons).
Figure 10.
Relative cumulative distribution of the Euclidean distance of the related area per rescue point for the different federal states and the federal level. Area per rescue point in ha calculated using Thiessen polygons).

Figure 11.
Relative cumulative distribution of the Euclidean distance from a rescue point to the nearest forest for the different federal states and the federal level.
Figure 11.
Relative cumulative distribution of the Euclidean distance from a rescue point to the nearest forest for the different federal states and the federal level.

Figure 12.
Relative cumulative distribution of the Euclidean distance from one rescue point to the next rescue point for the different federal states and the federal level.
Figure 12.
Relative cumulative distribution of the Euclidean distance from one rescue point to the next rescue point for the different federal states and the federal level.

Figure 13.
(a) Rescue point density map of Germany. (b,c) Map of the rescue points (green cross) as a section of the high dense area at two different scales.
Figure 13.
(a) Rescue point density map of Germany. (b,c) Map of the rescue points (green cross) as a section of the high dense area at two different scales.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Table 1.
Description of the federal level rescue point data model provided by the KWF.
| No. | Fieldname | Fieldname (Eng) | Fieldtype | Length | Status | Meaning |
|---|---|---|---|---|---|---|
| 1 | FID | FID | Object | ID | mandatory | Auto ID |
| 2 | Shape | Shape | Geometry | mandatory | Geographic point | |
| 3 | RP_Nr | Rescue point No. | String | 17 | mandatory | Unique designation of the rescue point |
| 4 | WGS_Breite | WGS_latitude | Double | 14/7 | mandatory | Latitude of RP in WGS84 |
| 5 | WGS_Laenge | WGS_longitude | Double | 14/7 | mandatory | Longitude of RP in WGS84 |
| 6 | Ortsbeschr | Locations-description | String | 254 | mandatory | Brief and concise description of the location of the rescue point |
| 7 | Schild | Sign | String | 16 | mandatory | Real signage of the rescue point |
| 8 | Urheber | Data supplier | String | 254 | mandatory | Name of the responsible institution |
| 9 | Bundesland | Federal state | String | 80 | mandatory | Name of the federal state |
Table 2.
Standard indices of the rescue point of the areas and the rescue points for the federal states and the federal level. Abbr.: Baden-Württemberg (BW), Bavaria (BA), Brandenburg (BR), Hesse (HE), Mecklenburg Western Pomerania (MP), Lower Saxony (LS), North Rhine-Westphalia (NR), Rhineland-Palatinate (RP), Saarland (SR), Saxony (SX), Saxony-Anhalt (SA), Schleswig-Holstein (SH), Thuringia (TH), Germany (GE).
Table 2.
Standard indices of the rescue point of the areas and the rescue points for the federal states and the federal level. Abbr.: Baden-Württemberg (BW), Bavaria (BA), Brandenburg (BR), Hesse (HE), Mecklenburg Western Pomerania (MP), Lower Saxony (LS), North Rhine-Westphalia (NR), Rhineland-Palatinate (RP), Saarland (SR), Saxony (SX), Saxony-Anhalt (SA), Schleswig-Holstein (SH), Thuringia (TH), Germany (GE).
| BW | BA | BR | HE | MP | LS | NR | |
|---|---|---|---|---|---|---|---|
| Abs. number Rescue points | 6727 | 12,863 | 1785 | 4715 | 1065 | 2703 | 10,735 |
| Area (km) | 35,747 | 70,541 | 29,654 | 21,115 | 23,294 | 47,709 | 34,112 |
| Forest area (km) | 13,526 | 24,923 | 10,320 | 8405 | 4944 | 10,310 | 8471 |
| Forestation percentage (%) | 38 | 35 | 35 | 40 | 21 | 22 | 25 |
| Rescue points/km (all) | 0.19 | 0.18 | 0.06 | 0.22 | 0.05 | 0.06 | 0.31 |
| Rescue points/km(forest) | 0.50 | 0.52 | 0.17 | 0.56 | 0.22 | 0.26 | 1.27 |
| RP | SR | SX | SA | SH | TH | GE | |
| Abs. number Rescue points | 12,707 | 822 | 2426 | 999 | 775 | 5316 | 63,718 |
| Area (km) | 19,858 | 2571 | 18,449 | 20,456 | 15,800 | 16,202 | 357,580 |
| Forest area (km) | 8060 | 856 | 4955 | 4575 | 1625 | 5408 | 106,587 |
| Forestation percentage (%) | 41 | 33 | 27 | 22 | 10 | 33 | 30 |
| Rescue points/km (all) | 0.64 | 0.32 | 0.13 | 0.05 | 0.05 | 0.33 | 0.18 |
| Rescue points/km(forest) | 1.58 | 0.96 | 0.49 | 0.22 | 0.48 | 0.98 | 0.60 |
Table 3.
Different rescue point data indices of the federal states and the federal level. Indices: DistRP (xx- quantile Euclidean distance from a random point to the nearest rescue point), DistNR (xx-quantile Euclidean distance from a random point to the nearest NavLog road), ThA (xx-quantile of the Thiessen polygon area per rescue point in ha), RPinside (% of the rescue points within the forest area), EDFor (xx-quantile of the Euclidean distance from a rescue point to nearest forest in m), EDRP (xx-quantile Euclidean distance from a random point to the nearest rescue point), RP2RP (xx-quantile Euclidean distance from one rescue point to the next rescue point). Abbr.: Baden-Württemberg (BW), Bavaria (BA), Brandenburg (BR), Hesse (HE), Mecklenburg Western Pomerania (MP), Lower Saxony (LS), North Rhine-Westphalia (NR), Rhineland-Palatinate (RP), Saarland (SR), Saxony (SX), Saxony-Anhalt (SA), Schleswig-Holstein (SH), Thuringia (TH), Germany (GE).
Table 3.
Different rescue point data indices of the federal states and the federal level. Indices: DistRP (xx- quantile Euclidean distance from a random point to the nearest rescue point), DistNR (xx-quantile Euclidean distance from a random point to the nearest NavLog road), ThA (xx-quantile of the Thiessen polygon area per rescue point in ha), RPinside (% of the rescue points within the forest area), EDFor (xx-quantile of the Euclidean distance from a rescue point to nearest forest in m), EDRP (xx-quantile Euclidean distance from a random point to the nearest rescue point), RP2RP (xx-quantile Euclidean distance from one rescue point to the next rescue point). Abbr.: Baden-Württemberg (BW), Bavaria (BA), Brandenburg (BR), Hesse (HE), Mecklenburg Western Pomerania (MP), Lower Saxony (LS), North Rhine-Westphalia (NR), Rhineland-Palatinate (RP), Saarland (SR), Saxony (SX), Saxony-Anhalt (SA), Schleswig-Holstein (SH), Thuringia (TH), Germany (GE).
| BW | BA | BR | HE | MP | LS | NR | RP | SR | SX | SA | SH | TH | GE | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DistRP (m) | 678 | 674 | 1049 | 611 | 903 | 996 | 528 | 286 | 447 | 659 | 953 | 711 | 397 | 623 |
| DistRP (m) | 1010 | 987 | 1561 | 910 | 1574 | 1745 | 1215 | 439 | 693 | 1127 | 1534 | 1447 | 624 | 1045 |
| DistRP (m) | 1413 | 1366 | 2157 | 1264 | 2816 | 3222 | 2870 | 632 | 1007 | 2045 | 2328 | 3564 | 926 | 1684 |
| DistRP (m) | 2338 | 2183 | 3251 | 1903 | 6368 | 7102 | 9897 | 1073 | 1641 | 5277 | 4160 | 10,044 | 1592 | 4278 |
| DistNR (m) | 29.3 | 64.4 | 75.9 | 40.8 | 74.3 | 97.4 | 47.3 | 36.9 | 57.0 | 127.8 | 79.5 | 99.9 | 63.8 | 54.9 |
| DistNR (m) | 64.7 | 149.6 | 207.0 | 93.5 | 176.2 | 272.9 | 118.8 | 86.5 | 144.2 | 300.2 | 183.0 | 254.9 | 141.6 | 134.6 |
| DistNR (m) | 121.8 | 323.9 | 599.4 | 185.0 | 441.7 | 956.1 | 286.3 | 175.7 | 415.9 | 726.9 | 387.5 | 866.9 | 265.2 | 326.7 |
| DistNR (m) | 286.2 | 1020 | 2654 | 764 | 2285 | 3500 | 1196 | 515 | 1853 | 2621 | 1730 | 3380 | 677 | 1652 |
| ThA (ha) | 88.7 | 93.3 | 330.3 | 95.4 | 220.8 | 134.6 | 8.7 | 35.8 | 60.9 | 70.7 | 192.5 | 69.7 | 44.2 | 45.8 |
| ThA (ha) | 162.0 | 156.1 | 529.5 | 160.4 | 354.7 | 283.7 | 26.6 | 57.5 | 102.2 | 133.6 | 343.1 | 129.1 | 81.6 | 101.2 |
| ThA (ha) | 276.4 | 248.1 | 828.2 | 255.3 | 607.0 | 548.5 | 70.1 | 87.7 | 148.5 | 257.7 | 587.7 | 242.4 | 137.4 | 208.7 |
| ThA (ha) | 519.7 | 502.3 | 1334.0 | 459.1 | 1148.8 | 1301.8 | 338.8 | 148.9 | 295.7 | 653.2 | 1099.9 | 625.4 | 263.2 | 576.0 |
| RPinside (%) | 18.0 | 18.9 | 36.0 | 34.6 | 73.1 | 35.0 | 52.3 | 68.1 | 35.4 | 25.6 | 40.6 | 61.3 | 49.7 | 41.4 |
| EDFor (m) | 6.6 | 6.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| EDFor (m) | 50.7 | 58.4 | 14.0 | 23.0 | 0.0 | 11.3 | 0.0 | 0.0 | 7.3 | 16.9 | 4.5 | 0.0 | 0.4 | 6.8 |
| EDFor (m) | 190.0 | 183.1 | 152.5 | 136.0 | 1.0 | 122.8 | 51.8 | 4.0 | 37.7 | 48.5 | 42.3 | 7.6 | 28.5 | 81.9 |
| EDFor (m) | 498.0 | 454.1 | 493.3 | 523.4 | 22.8 | 544.2 | 285.1 | 98.2 | 267.6 | 241.4 | 397.1 | 160.2 | 265.5 | 375.9 |
| EDRP (m) | 679 | 675 | 1049 | 611 | 904 | 997 | 529 | 287 | 447 | 660 | 953 | 711 | 398 | 623 |
| EDRP (m) | 1010 | 987 | 1561 | 911 | 1574 | 1746 | 1215 | 439 | 694 | 1128 | 1534 | 1448 | 625 | 1045 |
| EDRP (m) | 1413 | 1367 | 2157 | 1264 | 2817 | 3222 | 2870 | 632 | 1008 | 2046 | 2328 | 3564 | 927 | 1685 |
| EDRP (m) | 2338 | 2183 | 3252 | 1904 | 6369 | 7103 | 9897 | 1073 | 1642 | 5278 | 4161 | 10,045 | 1593 | 4279 |
| RP2RP (m) | 902 | 1107 | 1669 | 865 | 1340 | 762 | 115 | 478 | 637 | 121 | 1322 | 857 | 508 | 514 |
| RP2RP (m) | 1286 | 1434 | 2281 | 1196 | 1878 | 1381 | 279 | 638 | 892 | 650 | 1937 | 1221 | 745 | 919 |
| RP2RP (m) | 1712 | 1794 | 2917 | 1568 | 2673 | 2094 | 541 | 837 | 1202 | 1193 | 2626 | 1793 | 1064 | 1476 |
| RP2RP (m) | 2417 | 2391 | 4152 | 2208 | 4448 | 3698 | 1291 | 1213 | 1882 | 2361 | 4485 | 3577 | 1703 | 2460 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
MDPI and ACS Style
Purfürst, T. The Permanent German Forest Rescue Point System—Concept, Geographical Analysis, and Optimisation. Forests 2022, 13, 197. https://doi.org/10.3390/f13020197
AMA Style
Purfürst T. The Permanent German Forest Rescue Point System—Concept, Geographical Analysis, and Optimisation. Forests. 2022; 13(2):197. https://doi.org/10.3390/f13020197
Chicago/Turabian StylePurfürst, Thomas. 2022. "The Permanent German Forest Rescue Point System—Concept, Geographical Analysis, and Optimisation" Forests 13, no. 2: 197. https://doi.org/10.3390/f13020197
Note that from the first issue of 2016, this journal uses article numbers instead of page numbers. See further details here.