
Determination of Riparian Vegetation Biomass from an Unmanned Aerial Vehicle (UAV)

 ,
, 
 ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
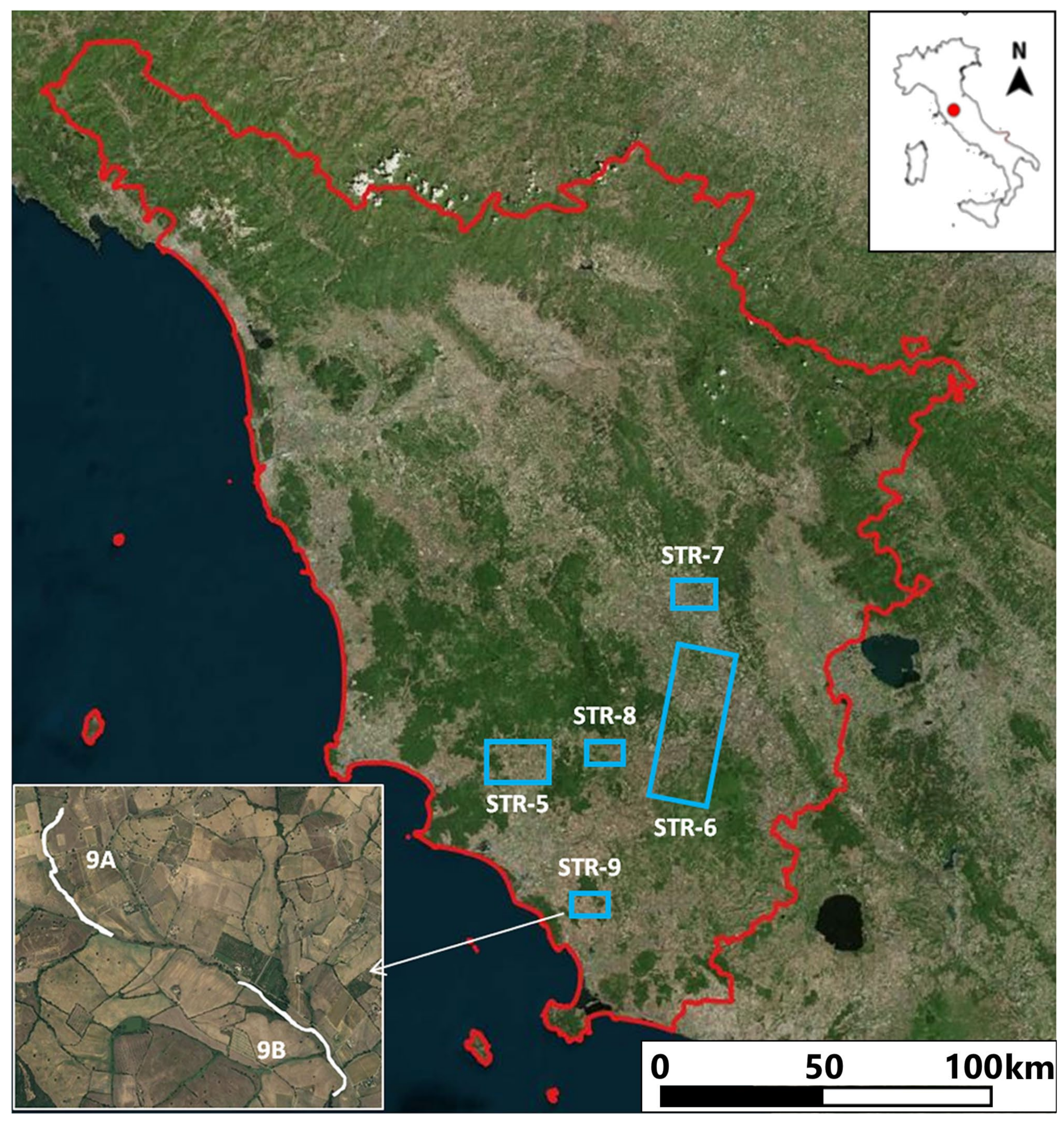
2.1. Study Area
2.2. Test Sites and Ground-Data Collection (GDC)
2.3. UAV Data Collection and Processing
2.4. Biomass Estimation Methodology
2.5. Model Validation
3. Results
3.1. Ground Data Collection (GDC)
3.2. UAV Estimated Dataset
3.3. Regression Models
3.4. Biomass Estimation
3.5. Comparison between Estimated and Measured Dataset
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Akasaka, T.; Akasaka, M.; Yanagawa, H. Relative importance of the environmental factors at site and landscape scales for bats along the riparian zone. Landsc. Ecol. Eng. 2010, 6, 247–255. [Google Scholar] [CrossRef]
- Resop, J.P.; Lehmann, L.; Hession, W.C. Drone laser scanning for modeling riverscape topography and vegetation: Comparison with traditional aerial Lidar. Drones 2019, 3, 35. [Google Scholar] [CrossRef] [Green Version]
- Dufour, S.; Bernez, I.; Betbeder, J.; Corgne, S.; Hubert-Moy, L.; Nabucet, J.; Rapinel, S.; Sawtschuk, J.; Trollé, C. Monitoring restored riparian vegetation: How can recent developments in remote sensing sciences help? Knowl. Managt. Aquat. Ecosyst. 2013, 410, 10. [Google Scholar] [CrossRef]
- Van Looy, K.; Tormos, T.; Souchon, Y.; Gilvear, D. Analyzing riparian zone ecosystem services bundles to instruct river management. Int. J. Biodivers. Sci. Ecosyst. Serv. Manag. 2017, 13, 330–341. [Google Scholar] [CrossRef]
- Camporeale, C.; Perona, P.; Ridolfi, L. Hydrological and geomorphological significance of riparian vegetation in drylands. In Dryland Ecohydrology; Springer: Cham, Switzerland, 2019; pp. 239–275. [Google Scholar] [CrossRef]
- Tabacchi, E.; Lambs, L.; Guilloy, H.; Planty-Tabacchi, A.M.; Muller, E.; Decamps, H. Impacts of riparian vegetation on hydrological processes. Hydrol. Process 2000, 14, 2959–2976. [Google Scholar] [CrossRef]
- Krzeminska, D.; Kerkhof, T.; Skaalsveen, K.; Stolte, J. Effect of riparian vegetation on stream bank stability in small agricultural catchments. Catena 2019, 172, 87–96. [Google Scholar] [CrossRef]
- Musser, S.R.; Grafe, J.; Ortega-Achury, S.L.; Ramirez-Avila, J.J. Influence of riparian vegetation on stream health and water quality. In World Environmental and Water Resources Congress 2019: Groundwater, Sustainability, Hydro-Climate/Climate Change, and Environmental Engineering; American Society of Civil Engineers: Reston, VA, USA, 2019; pp. 59–67. [Google Scholar] [CrossRef]
- Zhao, Q.; Zhang, Y.; Xu, S.; Ji, X.; Wang, S.; Ding, S. Relationships between riparian vegetation pattern and the hydraulic characteristics of upslope runoff. Sustainability 2019, 11, 2966. [Google Scholar] [CrossRef] [Green Version]
- Laslier, M.; Hubert-Moy, L.; Dufour, S. Mapping riparian vegetation functions using 3D bispectral LiDAR data. Water 2019, 11, 483. [Google Scholar] [CrossRef] [Green Version]
- Hupp, C.R.; Rinaldi, M. Riparian vegetation patterns in relation to fluvial landforms and channel evolution along selected rivers of Tuscany (Central Italy). Ann. Am. Assoc. Geogr. 2007, 97, 12–30. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lejeune, P.; Claessens, H. Multi-temporal monitoring of a regional riparian buffer network (>12,000 km) with LiDAR and photogrammetric point clouds. J. Environ. Manag. 2017, 202, 424–436. [Google Scholar] [CrossRef]
- Räpple, B.; Piégay, H.; Stella, J.C.; Mercier, D. What drives riparian vegetation encroachment in braided river channels at patch to reach scales? Insights from annual airborne surveys (Drôme River, SE France, 2005–2011). Ecohydrology 2017, 10, e1886. [Google Scholar] [CrossRef]
- González-Jaramillo, V.; Fries, A.; Bendix, J. AGB estimation in a tropical mountain forest (TMF) by means of RGB and multispectral images using an unmanned aerial vehicle (UAV). Remote Sens. 2019, 11, 1413. [Google Scholar] [CrossRef] [Green Version]
- Lefsky, M.A.; Cohen, W.B.; Harding, D.J.; Parker, G.G.; Acker, S.A.; Gower, S.T. Lidar remote sensing of above-ground biomass in three biomes. Glob. Ecol. Biogeogr. 2002, 11, 393–399. [Google Scholar] [CrossRef] [Green Version]
- Lefsky, M.A.; Cohen, W.B.; Parker, G.G.; Harding, D.J. Lidar remote sensing for ecosystem studies. Bioscience 2002, 52, 19–30. [Google Scholar] [CrossRef]
- Liang, X.; Kukko, A.; Hyyppä, J.; Lehtomäki, M.; Pyörälä, J.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Wang, Y. In-situ measurements from mobile platforms: An emerging approach to address the old challenges associated with forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 143, 97–107. [Google Scholar] [CrossRef]
- Turner, D.P.; Cohen, W.B.; Kennedy, R.E.; Fassnacht, K.S.; Briggs, J.M. Relationship between leaf area index and Landsat TM spectral vegetation indices across three temperate zone sites. Remote Sens. Environ. 1999, 70, 52–68. [Google Scholar] [CrossRef]
- Goetz, S.J. Remote sensing of riparian buffers: Past progress and future prospects. J. Am. Water Resour. Assoc. 2006, 42, 133–143. [Google Scholar] [CrossRef]
- Johansen, K.; Coops, N.C.; Gergel, S.E.; Stange, Y. Application of high spatial resolution satellite imagery for riparian and forest ecosystem classification. Remote Sens. Environ. 2007, 110, 29–44. [Google Scholar] [CrossRef]
- Yang, X. Integrated use of remote sensing and geographic information systems in riparian vegetation delineation and mapping. Int. J. Remote Sens. 2007, 28, 353–370. [Google Scholar] [CrossRef]
- Johansen, K.; Phinn, S.; Witte, C. Mapping of riparian zone attributes using discrete return LiDAR, QuickBird and SPOT-5 imagery: Assessing accuracy and costs. Remote Sens. Environ. 2010, 114, 2679–2691. [Google Scholar] [CrossRef]
- Aguiar, F.C.; Fernandes, M.R.; Ferreira, M.T. Riparian vegetation metrics as tools for guiding ecological restoration in riverscape set. Knowl. Managt. Aquat. Ecosyst. 2011, 402, 21. [Google Scholar] [CrossRef]
- Johansen, K.; Tiede, D.; Blaschke, T.; Arroyo, L.A.; Phinn, S. Automatic geographic object based mapping of streambed and riparian zone extent from lidar data in a temperate rural urban environment, Australia. Remote Sens. 2011, 3, 1139–1156. [Google Scholar] [CrossRef] [Green Version]
- Dufour, S.; Muller, E.; Straastma, M.; Corgne, S. Image uses for riparian vegetation study and management. In Imagery and River Management: Recent Advances and Challenging Issues; Carbonneau, R.E., Piégay, H., Eds.; Wiley: Hoboken, NJ, USA, 2012; pp. 215–239. [Google Scholar] [CrossRef]
- Fernandes, M.R.; Aguiar, F.C.; Ferreira, M.T.; Cardoso Pereira, J.M. Spectral separability of riparian forests from small and medium-sized rivers across a latitudinal gradient using multispectral imagery. Int. J. Remote Sens. 2013, 33, 2375–2401. [Google Scholar] [CrossRef]
- Dalponte, M.; Reyes, F.; Kandare, K.; Gianelle, D. Delineation of individual tree crowns from ALS and hyperspectral data: A comparison among four methods. Eur. J. Remote Sens. 2015, 48, 365–382. [Google Scholar] [CrossRef] [Green Version]
- Fujimoto, A.; Haga, C.; Matsui, T.; Machimura, T.; Hayashi, K.; Sugita, S.; Takagi, H. An end to end process development for uav-sfm based forest monitoring: Individual tree detection, species classification and carbon dynamics simulation. Forests 2019, 10, 680. [Google Scholar] [CrossRef] [Green Version]
- Di Gennaro, S.F.; Nati, C.; Dainelli, R.; Pastonchi, L.; Berton, A.; Toscano, P.; Matese, A. An automatic UAV based segmentation approach for pruning biomass estimation in irregularly spaced chestnut orchards. Forests 2020, 11, 308. [Google Scholar] [CrossRef] [Green Version]
- Navarro, A.; Young, M.; Allan, B.; Carnell, P.; Macreadie, P.; Ierodiaconou, D. The application of Unmanned Aerial Vehicles (UAVs) to estimate above-ground biomass of mangrove ecosystems. Remote Sens. Environ. 2020, 242, 111747. [Google Scholar] [CrossRef]
- Thiel, C.; Müller, M.M.; Berger, C.; Cremer, F.; Dubois, C.; Hese, S.; Baade, J.; Pathe, C. Monitoring selective logging in a pine-dominated forest in central Germany with repeated drone flights utilizing a low cost RTK quadcopter. Drones 2020, 4, 11. [Google Scholar] [CrossRef] [Green Version]
- Holopainen, M.; Vastaranta, M.; Hyyppä, J. Outlook for the next generation’s precision forestry in Finland. Forests 2014, 5, 1682–1694. [Google Scholar] [CrossRef] [Green Version]
- Dash, J.; Pont, D.; Brownlie, R.; Dunningham, A.; Watt, M.; Pearse, G. Remote sensing for precision forestry. NZJ For 2016, 60, 15–24. [Google Scholar]
- Messinger, M.; Asner, G.P.; Silman, M. Rapid assessments of amazon forest structure and biomass using small unmanned aerial systems. Remote Sens. 2016, 8, 615. [Google Scholar] [CrossRef] [Green Version]
- Taylor, S.; Veal, M.; Grift, T.; McDonald, T.; Corley, F. Precision Forestry: Operational Tactics for Today and Tomorrow. 25th Annual Meeting of the Council of Forest Engineers. 2002. Available online: www.eng.auburn.edu/files/file169.pdf (accessed on 3 March 2021).
- Iglhaut, J.; Cabo, C.; Puliti, S.; Piermattei, L.; O’Connor, J.; Rosette, J. Structure from motion photogrammetry in forestry: A review. Curr. For. Rep. 2019, 5, 155–168. [Google Scholar] [CrossRef] [Green Version]
- Maes, W.H.; Huete, A.R.; Avino, M.; Boer, M.M.; Dehaan, R.; Pendall, E.; Griebel, A.; Steppe, K. Can UAV-based infrared thermography be used to study plant-parasite interactions between mistletoe and Eucalypt trees? Remote Sens. 2018, 10, 2062. [Google Scholar] [CrossRef] [Green Version]
- Roşca, S.; Suomalainen, J.; Bartholomeus, H.; Herold, M. Comparing terrestrial laser scanning and unmanned aerial vehicle structure from motion to assess top of canopy structure in tropical forests. Interface Focus 2018, 8, 20170038. [Google Scholar] [CrossRef] [PubMed]
- Pádua, L.; Adão, T.; Guimarães, N.; Sousa, A.; Peres, E.; Sousa, J.J. Post-fire forestry recovery monitoring using high-resolution multispectral imagery from unmanned aerial vehicles. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. ISPRS Arch. 2019, 42, 301–305. [Google Scholar] [CrossRef] [Green Version]
- Safonova, A.; Tabik, S.; Alcaraz-Segura, D.; Rubtsov, A.; Maglinets, Y.; Herrera, F. Detection of fir trees (Abies sibirica) damaged by the bark beetle in unmanned aerial vehicle images with deep learning. Remote Sens. 2019, 11, 643. [Google Scholar] [CrossRef] [Green Version]
- Swinfield, T.; Lindsell, J.A.; Williams, J.V.; Harrison, R.D.; Agustiono Habibi Gemita, E.; Schönlieb, C.B.; Coomes, D.A. Accurate measurement of tropical forest canopy heights and aboveground carbon using structure from motion. Remote Sens. 2019, 11, 928. [Google Scholar] [CrossRef] [Green Version]
- Otsu, K.; Pla, M.; Vayreda, J.; Brotons, L. Calibrating the Severity of forest defoliation by pine processionary moth with Landsat and UAV imagery. Sensors 2018, 18, 3278. [Google Scholar] [CrossRef] [Green Version]
- Zhang, N.; Zhang, X.; Yang, G.; Zhu, C.; Huo, L.; Feng, H. Assessment of defoliation during the Dendrolimus tabulaeformis Tsai et Liu disaster outbreak using UAV-based hyperspectral images. Remote Sens. Environ. 2018, 217, 323–339. [Google Scholar] [CrossRef]
- Cardil, A.; Otsu, K.; Pla, M.; Silva, C.A.; Brotons, L. Quantifying pine processionary moth defoliation in a pine-oak mixed forest using unmanned aerial systems and multispectral imagery. PLoS ONE 2019, 14, e0213027. [Google Scholar] [CrossRef]
- Rossi, F.C.; Fritz, A.; Becker, G. Combining Satellite and UAV imagery to delineate forest cover and basal area after mixed-severity fires. Sustainability 2018, 10, 2227. [Google Scholar] [CrossRef] [Green Version]
- Larrinaga, A.R.; Brotons, L. Greenness indices from a low-cost UAV imagery as tools for monitoring post-fire forest recovery. Drones 2019, 3, 6. [Google Scholar] [CrossRef] [Green Version]
- Tuominen, S.; Balazs, A.; Honkavaara, E.; Pölönen, I.; Saari, H.; Hakala, T.; Viljanen, N. Hyperspectral UAV-imagery and photogrammetric canopy height model in estimating forest stand variables. Silva Fenn. 2017, 51, 7721. [Google Scholar] [CrossRef] [Green Version]
- Franklin, S.E.; Ahmed, O.S. Deciduous tree species classification using object-based analysis and machine learning with unmanned aerial vehicle multispectral data. Int. J. Remote Sens. 2018, 39, 5236–5245. [Google Scholar] [CrossRef]
- Komárek, J.; Klouček, T.; Prošek, J. The potential of unmanned aerial systems: A tool towards precision classification of hard-to-distinguish vegetation types? Int. J. Appl. Earth Obs. Geoinf. 2018, 71, 9–19. [Google Scholar] [CrossRef]
- Sothe, C.; Dalponte, M.; de Almeida, C.M.; Schimalski, M.B.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; Tommaselli, A.M.G. Tree species classification in a highly diverse subtropical forest integrating UAV-based photogrammetric point cloud and hyperspectral data. Remote Sens. 2019, 11, 1338. [Google Scholar] [CrossRef] [Green Version]
- Waite, C.E.; van der Heijden, G.M.F.; Field, R.; Boyd, D.S. A view from above: Unmanned aerial vehicles (UAVs) provide a new tool for assessing liana infestation in tropical forest canopies. J. Appl. Ecol. 2019, 56, 902–912. [Google Scholar] [CrossRef]
- Wu, H.; Wiesner-Hanks, T.; Stewart, E.L.; DeChant, C.; Kaczmar, N.; Gore, M.A.; Nelson, R.J.; Lipson, H. Autonomous detection of plant disease symptoms directly from aerial imagery. Plant Phenome J. 2019, 2, 190006. [Google Scholar] [CrossRef]
- Jucker, T.; Caspersen, J.; Chave, J.; Antin, C.; Barbier, N.; Bongers, F.; Dalponte, M.; van Ewijk, K.I.; Forrester, D.I.; Haeni, M.; et al. Allometric equations for integrating remote sensing imagery into forest monitoring programmes. Glob. Chang. Biol. 2016, 23, 177–190. [Google Scholar] [CrossRef]
- Carr, J.C.; Slyder, J.B. Individual tree segmentation from a leaf-off photogrammetric point cloud. Int. J. Remote Sens. 2018, 39, 5195–5210. [Google Scholar] [CrossRef]
- Chung, C.H.; Wang, C.H.; Hsieh, H.C.; Huang, C.Y. Comparison of forest canopy height profiles in a mountainous region of Taiwan derived from airborne lidar and unmanned aerial vehicle imagery. GISci Remote Sens. 2019, 56, 1289–1304. [Google Scholar] [CrossRef]
- Carvajal-Ramírez, F.; Marques Da Silva, J.; Agüera-Vega, F.; Martínez-Carricondo, P.; Serrano, J.; Moral García, F.J. Evaluation of fire severity indices based on pre-and post-fire multispectral imagery sensed from UAV. Remote Sens. 2019, 11, 993. [Google Scholar] [CrossRef] [Green Version]
- De Luca, G.; Silva, J.; Cerasoli, S.; Araújo, J.; Campos, J.; Di Fazio, S.; Modica, G. Object-Based land cover classification of cork oak woodlands using UAV imagery and Orfeo ToolBox. Remote Sens. 2019, 11, 1238. [Google Scholar] [CrossRef] [Green Version]
- Jayathunga, S.; Owari, T.; Tsuyuki, S. Digital aerial photogrammetry for uneven-aged forest management: Assessing the potential to reconstruct canopy structure and estimate living biomass. Remote Sens. 2019, 11, 338. [Google Scholar] [CrossRef] [Green Version]
- McClelland, M.P.; van Aardt, J.; Hale, D. Manned aircraft versus small unmanned aerial system—Forestry remote sensing comparison utilizing lidar and structure-from-motion for forest carbon modeling and disturbance detection. J. Appl. Remote Sens. 2019, 14, 022202. [Google Scholar] [CrossRef]
- Park, J.Y.; Muller-Landau, H.C.; Lichstein, J.W.; Rifai, S.W.; Dandois, J.P.; Bohlman, S.A. Quantifying leaf phenology of individual trees and species in a tropical forest using unmanned aerial vehicle (UAV) images. Remote Sens. 2019, 11, 32. [Google Scholar] [CrossRef] [Green Version]
- Vaglio Laurin, G.; Ding, J.; Disney, M.; Bartholomeus, H.; Herold, M.; Papale, D.; Valentini, R. Tree height in tropical forest as measured by different ground, proximal, and remote sensing instruments, and impacts on above ground biomass estimates. Int. J. Appl. Earth Obs. Geoinf. 2019, 82, 101899. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, F.; Qi, Y.; Deng, L.; Wang, X.; Yang, S. New research methods for vegetation information extraction based on visible light remote sensing images from an unmanned aerial vehicle (UAV). Int. J. Appl. Earth Obs. Geoinf. 2019, 78, 215–226. [Google Scholar] [CrossRef]
- Alonzo, M.; Andersen, H.E.; Morton, D.C.; Cook, B.D. Quantifying boreal forest structure and composition using UAV structure from motion. Forests 2018, 9, 119. [Google Scholar] [CrossRef] [Green Version]
- Dunford, R.; Michel, K.; Gagnage, M.; Piégay, H.; Trémelo, M.L. Potential and constraints of UAV technology for the characterisation of Mediterranean riparian forest. Int. J. Remote Sens. 2009, 30, 4915–4935. [Google Scholar] [CrossRef]
- Cierjacks, A.; Kleinschmit, B.; Babinsky, M.; Kleinschroth, F.; Markert, A.; Menzel, M.; Ziechmann, U.; Schiller, T.; Graf, M.; Lang, F. Carbon stocks of soil and vegetation on Danubian floodplain. J. Plant Nutr. Soil Sci. 2010, 173, 644–653. [Google Scholar] [CrossRef]
- Suchenwirth, L.; Forster, M.; Cierjacks, A.; Lang, F.; Kleinschmit, B. Knowledge-based classification of remote sensing data for the estimation of below- and above-ground organic carbon stocks in riparian forests. Wetl. Ecol. Manag. 2012, 20, 151–163. [Google Scholar] [CrossRef]
- Filipi, A.M.; Güneralp, I.; Randal, J. Hyperspectral remote sensing of aboveground biomass on a river meander bend using multivariate adaptive regression splines and stochastic gradient boosting. Remote Sens. Lett. 2014, 5, 432–441. [Google Scholar] [CrossRef]
- Güneralp, I.; Filippi, A.M.; Randall, J. Estimation of floodplain aboveground biomass using multispectral remote sensing and nonparametric modeling. Int. J. Appl. Earth Obs. Geoinf. 2014, 33, 119–126. [Google Scholar] [CrossRef]
- Hortobágyi, B.; Vautier, F.; Burkart, A.; Wrobel, T.J.; Peiry, J.L.; Steiger, J.; Corenblit, D.J.F. Use of photogrammetry for the study of riparian vegetation dynamics. In Proceedings of the IS Rivers-2e Conférence Internationale “Recherches et Actions au service des fleuves et grandes rivières”, Lion, France, 22–26 June 2015; Available online: https://asso.graie.org/isrivers/en/isrivers-2018/isrivers-2015/ (accessed on 10 November 2021).
- Michez, A.; Piégay, H.; Jonathan, L.; Claessens, H.; Lejeune, P. Mapping of riparian invasive species with supervised classification of Unmanned Aerial System (UAS) imagery. Int. J. Appl. Earth Obs. Geoinf. 2016, 44, 88–94. [Google Scholar] [CrossRef]
- Michez, A.; Piégay, H.; Lisein, J.; Claessens, H.; Lejeune, P. Classification of riparian forest species and health condition using multi-temporal and hyperspatial imagery from unmanned aerial system. Environ. Monit. Assess. 2016, 188, 146. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Fernandes, M.R.; Aguiar, F.C.; Martins, M.J.; Rico, N.; Ferreira, M.T.; Correia, A.C. Carbon stock estimations in a Mediterranean riparian forest: A case study combining field data and UAV imagery. Forests 2020, 11, 376. [Google Scholar] [CrossRef] [Green Version]
- Huylenbroeck, L.; Laslier, M.; Dufour, S.; Georges, B.; Michez, A. Using remote sensing to characterize riparian vegetation: A review of available tools and perspectives for managers. J. Environ. Manag. 2020, 267, 110652. [Google Scholar] [CrossRef] [PubMed]
- Cartisano, R.; Mattioli, W.; Corona, P.; Mugnozza, G.; Sabatti, M.; Ferrari, B.; Cimini, D.; Giuliarelli, D. Assessing and mapping biomass potential productivity from poplardominated riparian forests: A case study. Biomass Bioenerg. 2013, 54, 293–302. [Google Scholar] [CrossRef] [Green Version]
- Castellani, C.; Scrinzi, G.; Tabacchi, G.; Tosi, V. Inventario Forestale Nazionale Italiano (IFNI): Tavole di Cubatura a Doppia Entrata/Istituto Sperimentale Per L’assestamento Forestale e per L’alpicoltura (MAP/ISAFA). 1984. Available online: https://www.collegiogeometri.bo.it/public/allegatiNews/1c923229-3632-445a-9151-6cce3414e617_fascicolo%20completo.pdf (accessed on 12 January 2021).
- Wood Fuel Handbook. 2008. Available online: http://www.biomasstradecentre2.eu/available-literature/AEBIOM (accessed on 12 January 2021).
- Khosravipour, A.; Skidmore, A.K.; Isenburg, M.; Wang, T.; Hussin, Y.A. Generating pit-free canopy height models from airborne lidar. Photogramm. Eng. Remote Sens. 2014, 80, 863–872. [Google Scholar] [CrossRef]
- Silva, C.A.; Crookston, N.L.; Hudak, A.T.; Vierling, L.A. Package “rLiDAR”. LiDAR Data Processing and Visualization. R package version 0.1.1. 2017. Available online: https://CRAN.R-project.org/package=rLiDAR (accessed on 15 May 2020).
- Silva, C.A.; Hudak, A.T.; Vierling, L.A.; Loudermilk, E.L.; O’Brien, J.J.; Hiers, J.K.; Jack, S.B.; Gonzalez-Benecke, C.; Lee, H.; Falkowski, M.F.; et al. Imputation of individual longleaf pine (Pinus palustris Mill.) tree attributes from field and LiDAR data. Can. J. Remote Sens. 2016, 42, 554–573. [Google Scholar] [CrossRef]
- Ganz, S.; Käber, Y.; Adler, P. Measuring tree height with remote sensing-a comparison of photogrammetric and LiDAR data with different field measurements. Forests 2019, 10, 694. [Google Scholar] [CrossRef] [Green Version]
- Wilton, C.P.; da Silva, C.P. LAB Fit Curve Fitting Software. Nonlinear Regression and Treatment of Data Program, 7.2.50. 2011. Available online: http://labfit.net/ (accessed on 15 May 2020).
- Lu, J.; Wang, H.; Qin, S.; Cao, L.; Pu, R.; Li, G.; Sun, J. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and Backpack LiDAR point clouds. Int. J. Appl. Earth Obs. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; González-Ferreiro, E.; Monleón, V.J.; Faias, S.P.; Tomé, M.; Díaz-Varela, R.A. Use of multi-temporal UAV-derived imagery for estimating individual tree growth in Pinus pinea stands. Forests 2017, 8, 300. [Google Scholar] [CrossRef]
- Domingo, D.; Ørka, H.O.; Næsset, E.; Kachamba, D.; Gobakken, T. Effects of UAV image resolution, camera type, and image overlap on accuracy of biomass predictions in a tropical woodland. Remote Sens. 2019, 11, 948. [Google Scholar] [CrossRef] [Green Version]
- Malek, S.; Miglietta, F.; Gobakken, T.; Næsset, E.; Gianelle, D.; Dalponte, M. Prediction of stem diameter and biomass at individual tree crown level with advanced machine learning techniques. iForest-Biogeosci. For. 2019, 12, 323–329. [Google Scholar] [CrossRef] [Green Version]
- Jayathunga, S.; Owari, T.; Tsuyuki, S. The use of fixed–wing UAV photogrammetry with LiDAR DTM to estimate merchantable volume and carbon stock in living biomass over a mixed conifer–broadleaf forest. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 767–777. [Google Scholar] [CrossRef]
- Smith, J.E.; Heath, L.S.; Hoover, C.M. Carbon factors and models for forest carbon estimates for the 2005–2011 National Greenhouse Gas Inventories of the United States. For. Ecol. Manag. 2013, 307, 7–19. [Google Scholar] [CrossRef]
- Correia, A.C.; Tomé, M.; Pacheco, C.A.; Faias, S.; Dias, A.C.; Freire, J.; Carvalho, P.O.; Pereira, J.S. Biomass allometry and carbon factors for a Mediterranean pine (Pinus pinea L.) in Portugal. For. Syst. 2010, 19, 418–433. [Google Scholar] [CrossRef]
- Dybala, K.E.; Matzek, V.; Gardali, T.; Seavy, N.E. Carbon sequestration in riparian forests: A global synthesis and meta-analysis. Glob. Chang. Biol. 2019, 25, 57–67. [Google Scholar] [CrossRef] [Green Version]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent advances in Unmanned Aerial Vehicles forest remote sensing—A systematic review. Part II: Research applications. Forests 2021, 12, 397. [Google Scholar] [CrossRef]
- Chen, S.; McDermid, G.; Castilla, G.; Linke, J. Measuring vegetation height in linear disturbances in the boreal forest with UAV photogrammetry. Remote Sens. 2017, 9, 1257. [Google Scholar] [CrossRef] [Green Version]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Zone ID | Location | Waterway Segment | Type | ID_UAV * | GDC ID ** |
|---|---|---|---|---|---|
| STR-5 | 42°53′18.22″ N 11°33′41.57″ E | Bruna 5A | River | 5A | A |
| Bruna 5B | River | 5B | B | ||
| Asina | Creek | 5C | |||
| Rigo | Creek | 5D | C | ||
| STR-6 | 42°53′18.22″ N 11°33′41.57″ E | Asso | Creek | 6A | |
| Orcia | River | 6B | |||
| Tuoma | Creek | 6C | |||
| Ente | Creek | 6D | |||
| STR-7 | 42°53′18.22″ N 11°33′41.57″ E | Ombrone 7A | River | 7A | D |
| Ombrone 7B | River | 7B | |||
| STR-8 | 42°53′18.22″ N 11°33′41.57″ E | Ombrone 8A | River | 8A | E |
| Ombrone 8B | River | 8B | |||
| Gretano | Creek | 8C | F | ||
| STR-9 | 42°53′18.22″ N 11°33′41.57″ E | Osa 9A | Creek | 9A | |
| Osa 9B | Creek | 9B |
| GDC Site | Length | Surface | Trees | Species | DBH | H | CD | Biomass | |
|---|---|---|---|---|---|---|---|---|---|
| m | m2 | N | Type | % | cm | m | m | Mg | |
| A | 108 | 1135 | 25 | Populus nigra | 45 | 26.83 ± 16.30 | 11.40 ± 3.96 | 7.65 ± 3.36 | 0.18 ± 0.27 |
| Robinia pseudoacacia | 19 | ||||||||
| Acer monspessulanum | 18 | ||||||||
| Quercus ilex | 18 | ||||||||
| B | 68 | 884 | 15 | Quercus pubescens | 50 | 23.67 ± 6.53 | 13.55 ± 2.34 | 5.23 ± 0.42 | 0.25 ± 0.16 |
| Robinia pseudoacacia | 44 | ||||||||
| Populus nigra | 6 | ||||||||
| C | 34 | 568 | 15 | Populus nigra | 87 | 24.25 ± 13.26 | 10.52 ± 2.26 | 3.92 ± 1.43 | 0.12 ± 0.15 |
| Quercus ilex | 13 | ||||||||
| D | 190 | 2296 | 80 | Robinia pseudoacacia | 80 | 16.55 ± 8.41 | 10.82 ± 2.83 | 4.94 ± 1.14 | 0.13 ± 0.13 |
| Populus nigra | 15 | ||||||||
| Salix alba | 5 | ||||||||
| E | 25 | 479 | 26 | Populus nigra | 70 | 28.88 ± 8.03 | 13.60 ± 3.75 | 3.97 ± 0.77 | 0.18 ± 0.12 |
| Salix alba | 30 | ||||||||
| F | 43 | 554 | 19 | Populus nigra | 59 | 19.64 ± 5.82 | 13.40 ± 4.56 | 5.83 ± 2.72 | 0.26 ± 0.15 |
| Robinia pseudoacacia | 23 | ||||||||
| Salix alba | 9 | ||||||||
| Ulmus minor | 5 | ||||||||
| Alnus glutinosa | 4 | ||||||||
| Zone ID | ID_UAV (GDC Site) | Total Area (ha) | Σ Crown Areas (ha) | Tree Cover (%) | H (m) | CD (m) |
|---|---|---|---|---|---|---|
| STR-5 | 5A (A) | 3.14 | 2.09 | 67 | 14.33 ± 5.57 | 4.88 ± 1.56 |
| 5B (B) | 4.16 | 2.69 | 64 | 12.96 ± 4.53 | 5.19 ± 1.74 | |
| 5C | 3.67 | 2.22 | 60 | 16.56 ± 6.87 | 5.06 ± 1.60 | |
| 5D (C) | 8.27 | 3.43 | 42 | 10.71 ± 3.76 | 5.10 ± 1.49 | |
| STR-6 | 6A | 1.30 | 1.07 | 82 | 19.87 ± 4.58 | 5.79 ± 1.49 |
| 6B | 2.97 | 2.61 | 88 | 14.62 ± 5.25 | 5.07 ± 1.36 | |
| 6C | 1.08 | 0.88 | 81 | 16.66 ± 4.15 | 5.65 ± 1.25 | |
| 6D | 1.97 | 1.62 | 82 | 18.40 ± 6.51 | 5.98 ± 1.35 | |
| STR-7 | 7A (D) | 1.10 | 0.92 | 84 | 11.20 ± 5.55 | 4.56 ± 1.19 |
| 7B | 1.58 | 1.42 | 90 | 12.37 ± 5.71 | 5.12 ± 1.43 | |
| STR-8 | 8A (E) | 6.43 | 3.03 | 47 | 13.74 ± 5.47 | 5.18 ± 1.60 |
| 8B | 4.34 | 0.94 | 22 | 15.96 ± 7.20 | 3.72 ± 1.70 | |
| 8C (F) | 1.15 | 0.65 | 57 | 18.83 ± 6.32 | 4.79 ± 1.98 | |
| STR-9 | 9A | 1.35 | 1.25 | 92 | 13.43 ± 4.52 | 5.57 ± 1.50 |
| 9B | 1.56 | 1.18 | 75 | 12.97 ± 6.05 | 5.52 ± 1.53 |
| N° | Equation | R2 | RMSE (Mg) |
|---|---|---|---|
| Model 1 | 0.56 | 0.10 | |
| Model 2 | 0.57 | 0.10 | |
| Model 3 | 0.59 | 0.18 | |
| Model 4 | 0.63 | 0.09 |
| Zone ID | ID_UAV | Total Area (ha) | Biomass Per Tree (Mg) | Biomass (Mg ha−1) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Model 1 | Model 2 | Model 3 | Model 4 | Model 1 | Model 2 | Model 3 | Model 4 | |||
| STR-5 | 5A | 3.14 | 0.30 ± 0.03 | 0.47 ± 0.09 | 0.20 ± 0.01 | 0.23 ± 0.02 | 96.0 | 151.5 | 63.3 | 74.0 |
| 5B | 4.16 | 0.21 ± 0.02 | 0.25 ± 0.04 | 0.19 ± 0.01 | 0.20 ± 0.01 | 57.7 | 68.1 | 52.0 | 55.0 | |
| 5C | 3.67 | 0.47 ± 0.05 | 1.03 ± 0.16 | 0.23 ± 0.01 | 0.30 ± 0.03 | 127.1 | 281.9 | 63.8 | 82.7 | |
| 5D | 8.27 | 0.12 ± 0.01 | 0.13 ± 0.01 | 0.15 ± 0.01 | 0.15 ± 0.01 | 23.0 | 24.7 | 27.8 | 27.9 | |
| STR-6 | 6A | 1.30 | 0.60 ± 0.03 | 1.06 ± 0.11 | 0.24 ± 0.01 | 0.31 ± 0.02 | 271.8 | 475.5 | 109.9 | 140.1 |
| 6B | 2.97 | 0.30 ± 0.02 | 0.38 ± 0.05 | 0.20 ± 0.01 | 0.23 ± 0.01 | 120.2 | 153.0 | 83.4 | 92.4 | |
| 6C | 1.08 | 0.37 ± 0.02 | 0.47 ± 0.04 | 0.20 ± 0.01 | 0.22 ± 0.01 | 180.1 | 226.3 | 94.9 | 107.3 | |
| 6D | 1.97 | 0.57 ± 0.05 | 1.22 ± 0.16 | 0.24 ± 0.02 | 0.32 ± 0.03 | 196.8 | 425.0 | 84.4 | 110.7 | |
| STR-7 | 7A | 1.10 | 0.18 ± 0.03 | 0.28 ± 0.07 | 0.14 ± 0.01 | 0.16 ± 0.01 | 86.4 | 133.9 | 65.6 | 75.3 |
| 7B | 1.58 | 0.22 ± 0.03 | 0.33 ± 0.08 | 0.18 ± 0.01 | 0.20 ± 0.02 | 89.1 | 134.3 | 71.5 | 80.6 | |
| STR-8 | 8A | 6.43 | 0.29 ± 0.03 | 0.37 ± 0.06 | 0.20 ± 0.01 | 0.24 ± 0.02 | 60.1 | 76.3 | 41.8 | 49.2 |
| 8B | 4.34 | 0.48 ± 0.04 | 0.79 ± 0.11 | 0.16 ± 0.01 | 0.26 ± 0.02 | 82.5 | 130.7 | 28.1 | 44.5 | |
| 8C | 1.15 | 0.59 ± 0.05 | 1.22 ± 0.15 | 0.26 ± 0.02 | 0.35 ± 0.03 | 158.7 | 329.4 | 68.9 | 93.4 | |
| STR-9 | 9A | 1.35 | 0.23 ± 0.02 | 0.27 ± 0.04 | 0.20 ± 0.01 | 0.21 ± 0.01 | 80.7 | 95.1 | 72.8 | 75.5 |
| 9B | 1.56 | 0.26 ± 0.03 | 0.46 ± 0.09 | 0.20 ± 0.01 | 0.23 ± 0.02 | 75.8 | 133.4 | 57.8 | 66.4 | |
| Site | STR-5 | STR-7 | STR-8 | STR-9 | |
|---|---|---|---|---|---|
| Cutting Area (ha) | 44.96 | 18 | 19.86 | 8.09 | |
| Selective cutting grade (%) | 66 | 33 | 33 | 50 | |
| Measured Biomass (Mg) | 1844 | 495 | 373 | 277 | |
| Estimated Biomass (Mg ha−1) | Model 1 | 75.9 | 87.7 | 71.3 | 78.2 |
| Model 2 | 131.5 | 134.1 | 103.5 | 114.2 | |
| Model 3 | 51.7 | 68.5 | 34.9 | 65.3 | |
| Model 4 | 59.9 | 77.9 | 46.8 | 70.9 | |
| Total biomass (Mg) | Model 1 | 2252 | 521 | 467 | 316 |
| Model 2 | 3902 | 797 | 678 | 462 | |
| Model 3 | 1534 | 407 | 229 | 264 | |
| Model 4 | 1777 | 463 | 307 | 287 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Matese, A.; Berton, A.; Chiarello, V.; Dainelli, R.; Nati, C.; Pastonchi, L.; Toscano, P.; Di Gennaro, S.F. Determination of Riparian Vegetation Biomass from an Unmanned Aerial Vehicle (UAV). Forests 2021, 12, 1566. https://doi.org/10.3390/f12111566
Matese A, Berton A, Chiarello V, Dainelli R, Nati C, Pastonchi L, Toscano P, Di Gennaro SF. Determination of Riparian Vegetation Biomass from an Unmanned Aerial Vehicle (UAV). Forests. 2021; 12(11):1566. https://doi.org/10.3390/f12111566
Chicago/Turabian StyleMatese, Alessandro, Andrea Berton, Valentina Chiarello, Riccardo Dainelli, Carla Nati, Laura Pastonchi, Piero Toscano, and Salvatore Filippo Di Gennaro. 2021. "Determination of Riparian Vegetation Biomass from an Unmanned Aerial Vehicle (UAV)" Forests 12, no. 11: 1566. https://doi.org/10.3390/f12111566