
Enhanced Maximum Power Point Techniques for Solar Photovoltaic System under Uniform Insolation and Partial Shading Conditions: A Review

Abstract
:1. Introduction
1.1. Motivation and Incitement
1.2. Research Gap
1.3. Contribution
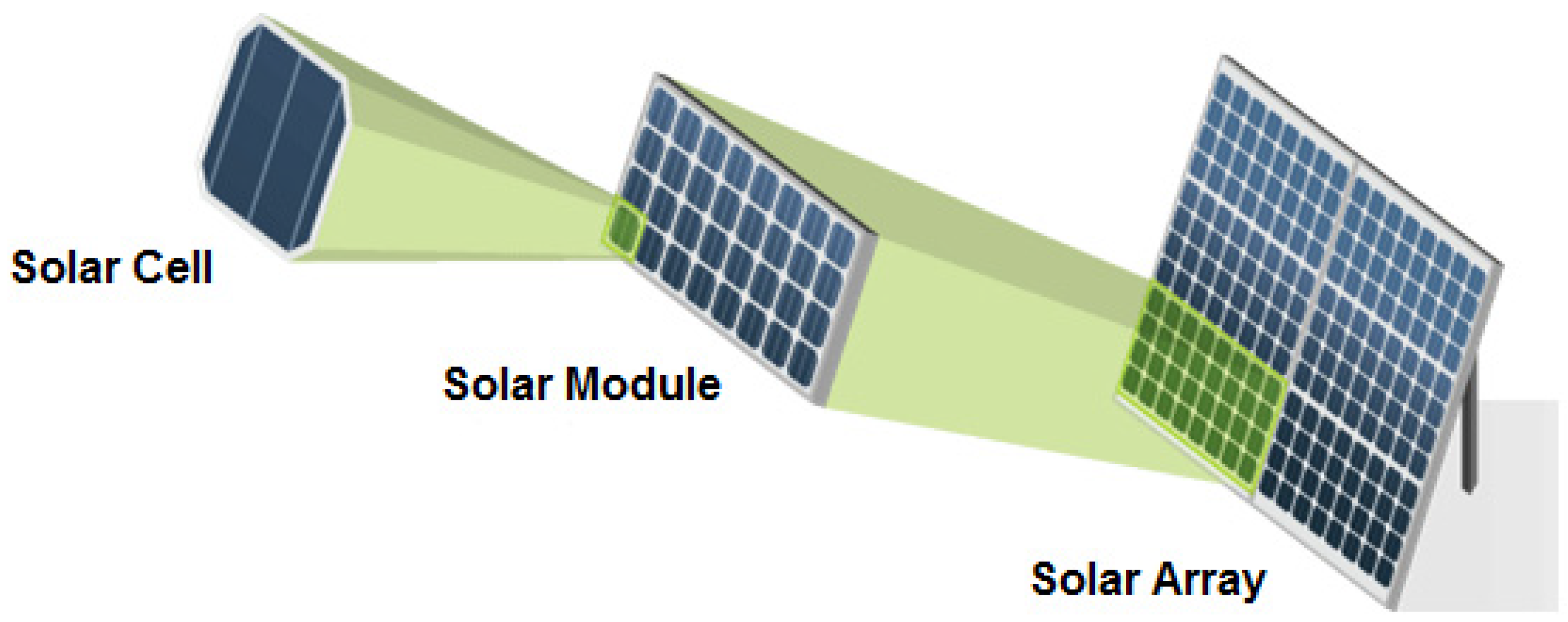
2. Solar PV Modeling and Characteristics
2.1. PV Cell Model
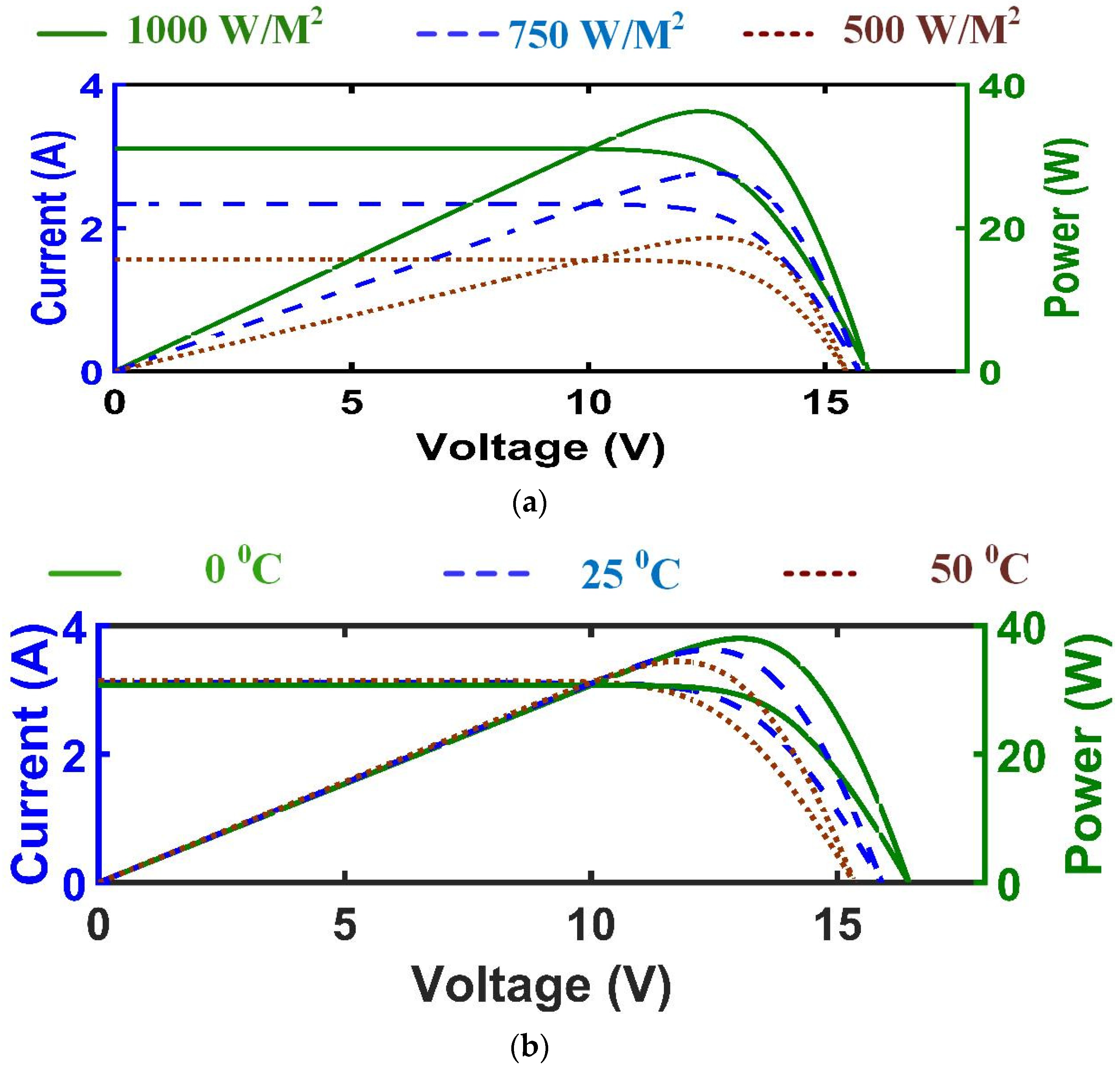
2.2. Characteristics of a PV System
2.3. Solar PV System under Partial Shading
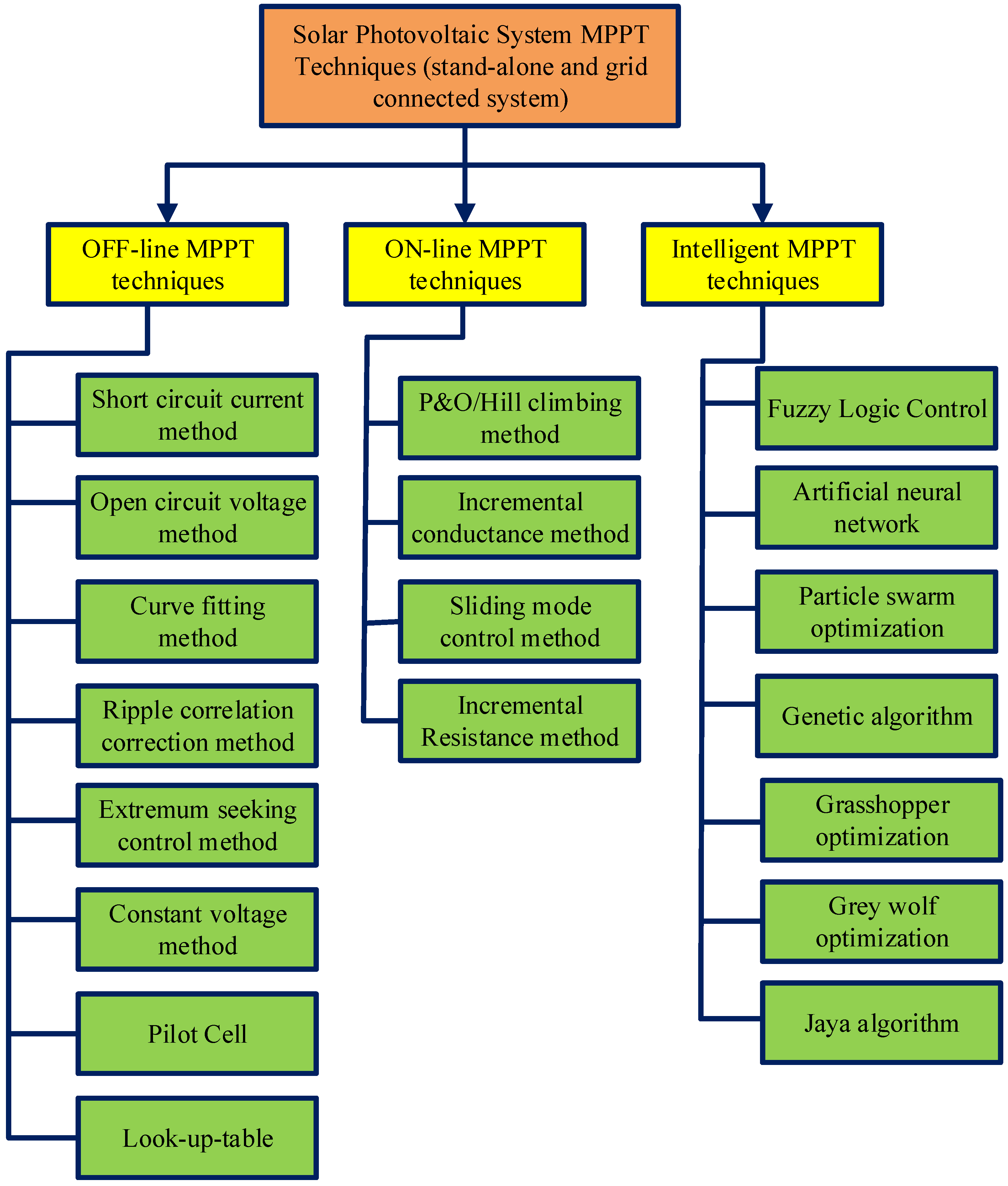
3. MPPT Techniques
3.1. Off-Line MPPT Techniques
- ➢
- They are not suitable for high-efficiency operations.
- ➢
- No real-time adjustment is made.
- ➢
- It is noticeable that with full day operation, the irradiance and temperature vary; hence, intermittent measurement offline parameters (VOC, ISC) are required. This intermittent/periodic measurement causes a power loss.
- ➢
- These approaches never operate at accurate MPP, and hence are not suitable for efficient systems.
- ➢
- Not suitable for environmental changing conditions.
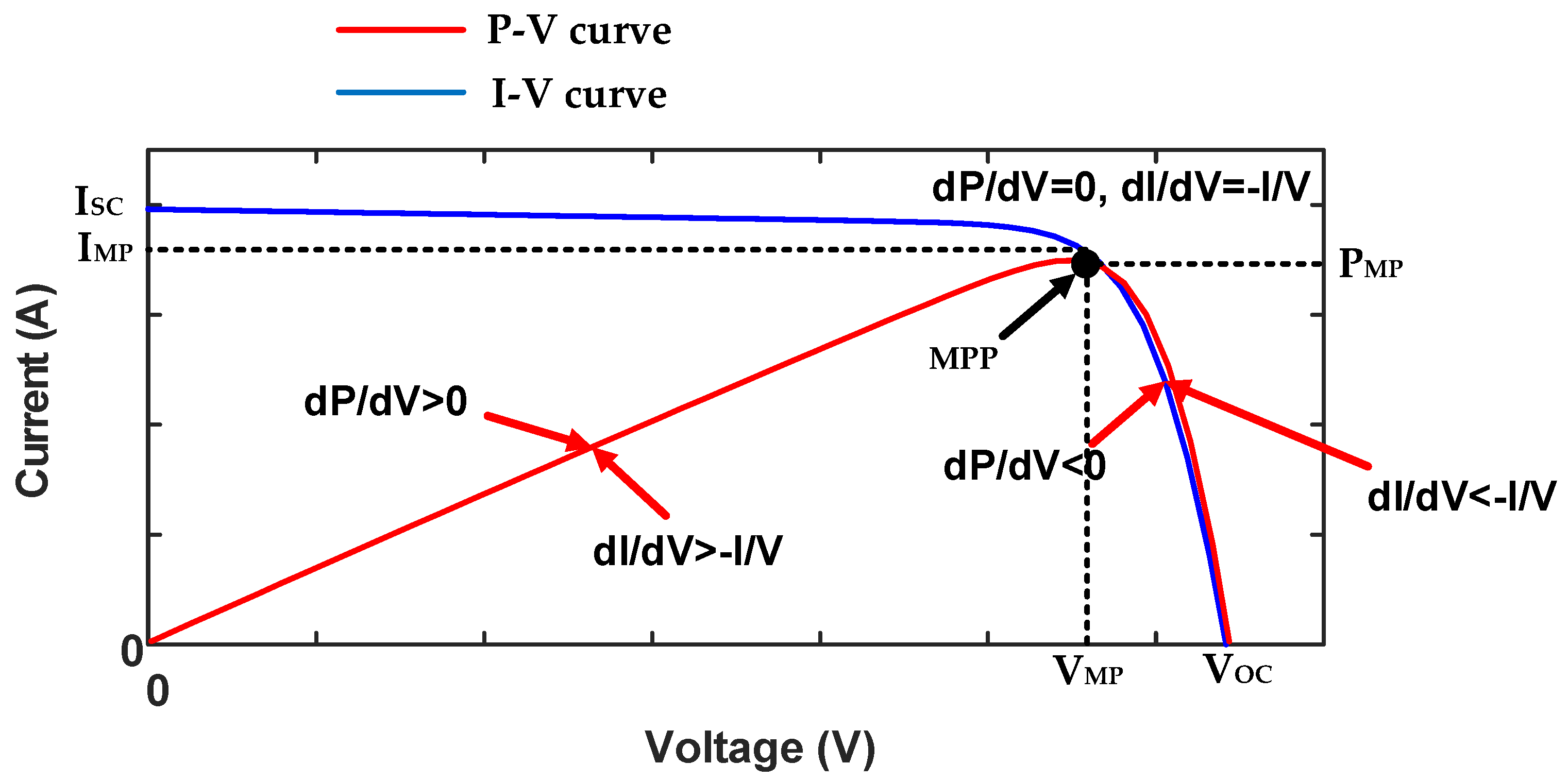
3.2. On-Line MPPT Techniques


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Perturbation (∆V) | Change in Power (∆P) | Next Perturbation Direction |
|---|---|---|
| ∆V > 0 (Positive) | ∆P > 0 (Positive) | Positive |
| ∆V < 0 (Negative) | ∆P > 0 (Positive) | Negative |
| ∆V > 0 (Positive) | ∆P < 0 (Negative) | Negative |
| ∆V < 0 (Negative) | ∆P < 0 (Negative) | Positive |
3.3. Intelligent MPPT Techniques
3.3.1. Fuzzy Logic Control (FLC)
- E(k) represents the change in slope of the P-V curve;
- ∆e(k) denotes the change in the value of the slope of the P-V curve;
- ∆D denotes the change in the duty cycle.
3.3.2. Artificial Neural Network
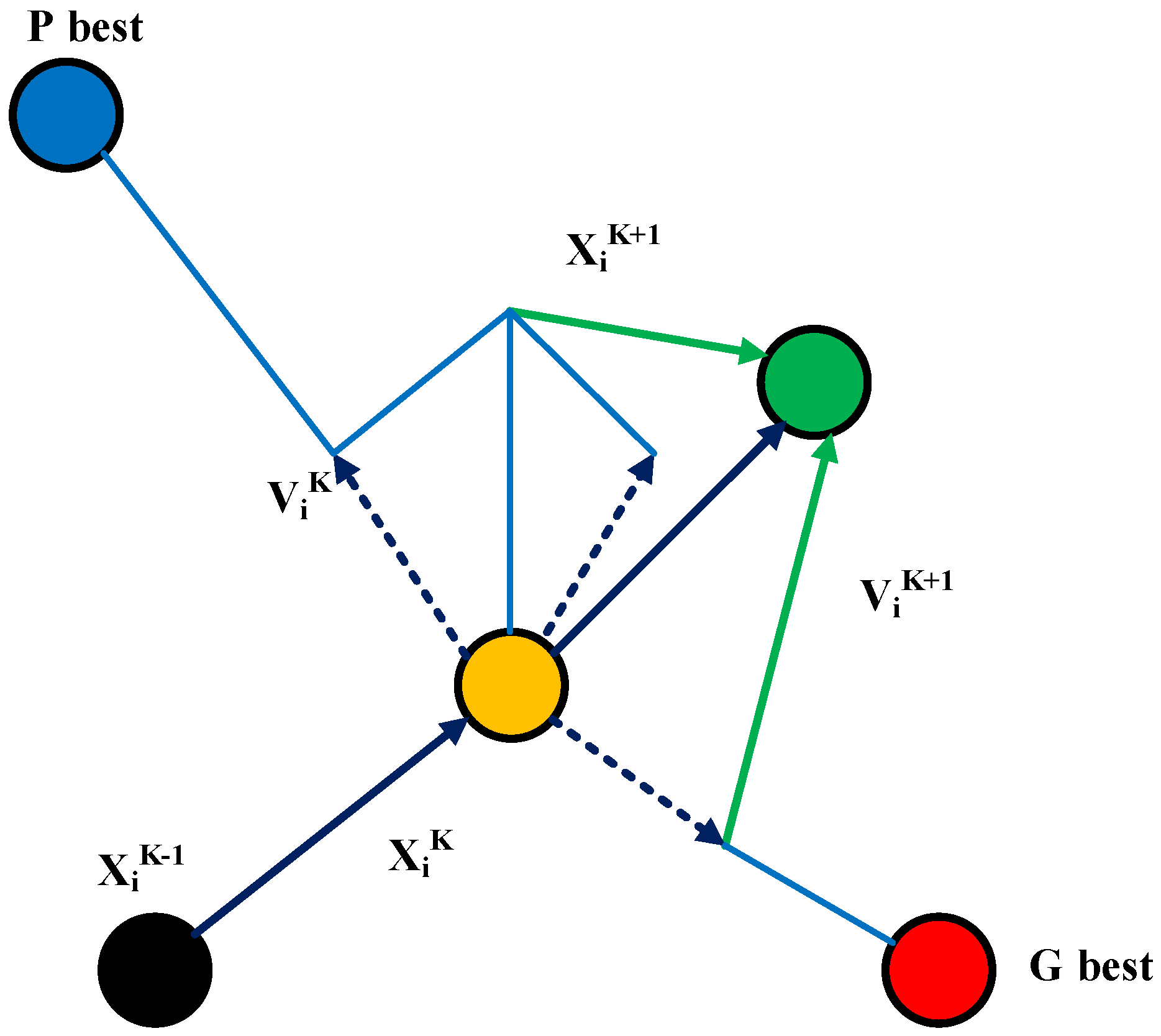
3.3.3. Particle Swarm Optimization
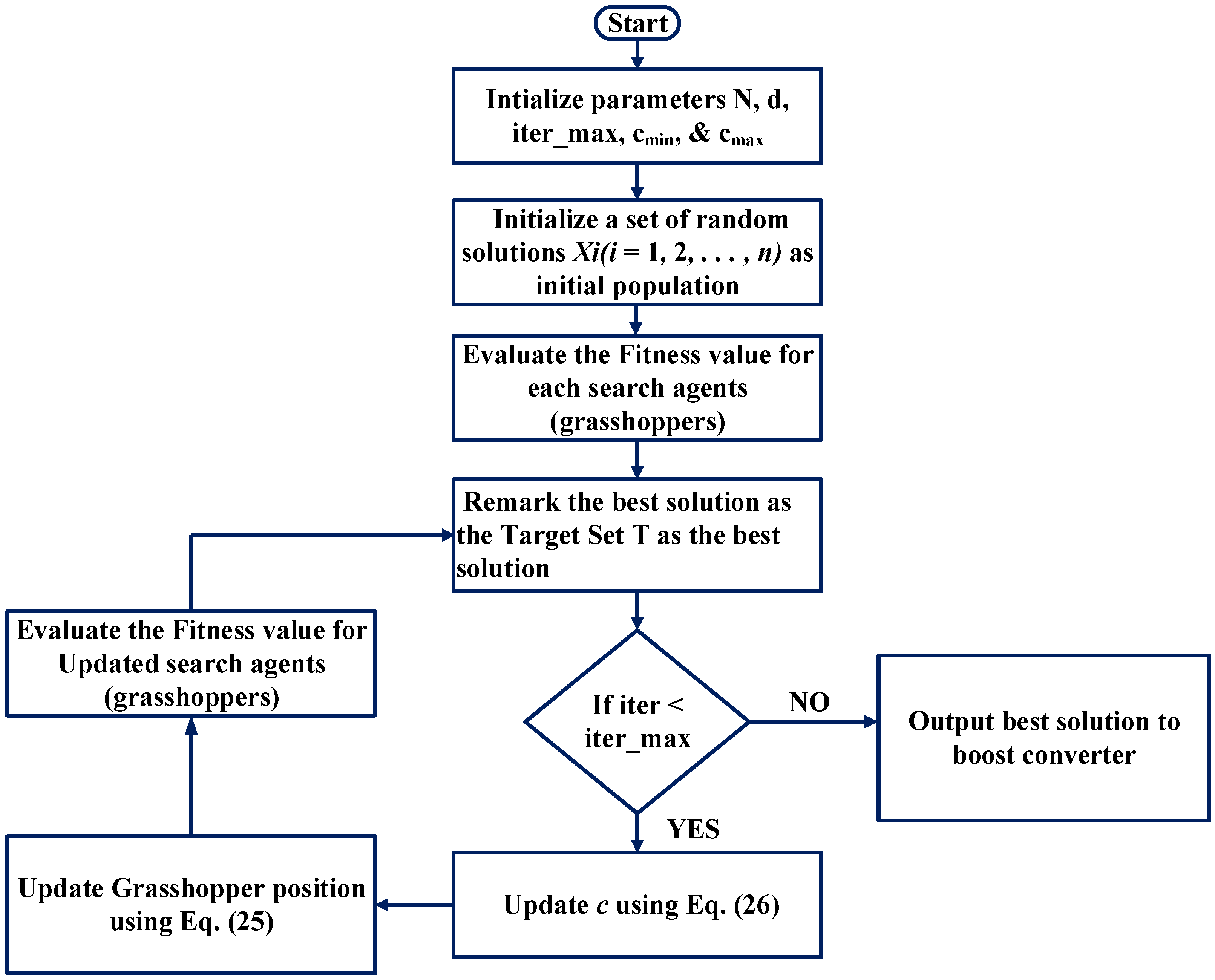
3.3.4. Grasshopper Optimization
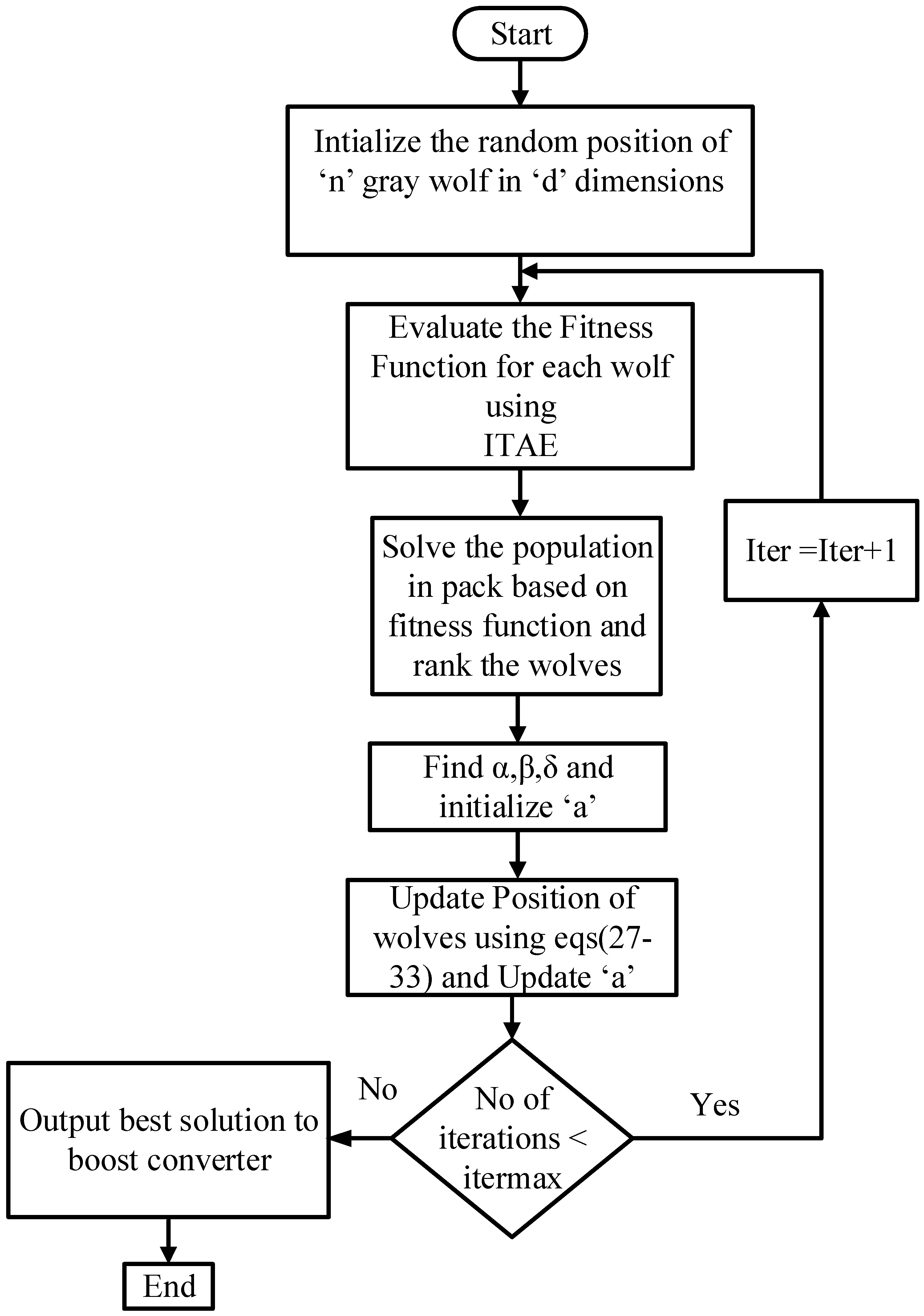
3.3.5. Grey Wolf Optimization
3.3.6. Jaya Algorithm
4. Discussions and Comparative Analysis
4.1. Capability of Tracking GMPP
4.2. Convergence Speed
4.3. Complexity
4.4. Sensitivity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ahmed, M.; Abdelrahem, M.; Kennel, R. Highly Efficient and Robust Grid Connected Photovoltaic System Based Model Predictive Control with Kalman Filtering Capability. Sustainability 2020, 12, 4542. [Google Scholar] [CrossRef]
- Kannan, N.; Vakeesan, D. Solar Energy for Future World: A Review. Renew. Sustain. Energy Rev. 2016, 62, 1092–1105. [Google Scholar] [CrossRef]
- Bastidas-Rodriguez, J.D.; Franco, E.; Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G. Maximum Power Point Tracking Architectures for Photovoltaic Systems in Mismatching Conditions: A Review. IET Power Electron. 2014, 7, 1396–1413. [Google Scholar] [CrossRef]
- Bhatnagar, P.; Nema, R.K. Maximum Power Point Tracking Control Techniques: State-of-the-Art in Photovoltaic Applications. Renew. Sustain. Energy Rev. 2013, 23, 224–241. [Google Scholar] [CrossRef]
- Verma, D.; Nema, S.; Shandilya, A.M.; Dash, S.K. Maximum Power Point Tracking (MPPT) Techniques: Recapitulation in Solar Photovoltaic Systems. Renew. Sustain. Energy Rev. 2016, 54, 1018–1034. [Google Scholar] [CrossRef]
- Reisi, A.R.; Moradi, M.H.; Jamasb, S. Classification and Comparison of Maximum Power Point Tracking Techniques for Photovoltaic System: A Review. Renew. Sustain. Energy Rev. 2013, 19, 433–443. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. A Comparative Study on Maximum Power Point Tracking Techniques for Photovoltaic Power Systems. IEEE Trans. Sustain. Energy 2012, 4, 89–98. [Google Scholar] [CrossRef]
- Kamarzaman, N.A.; Tan, C.W. A Comprehensive Review of Maximum Power Point Tracking Algorithms for Photovoltaic Systems. Renew. Sustain. Energy Rev. 2014, 37, 585–598. [Google Scholar] [CrossRef]
- Koutroulis, E.; Blaabjerg, F. Overview of Maximum Power Point Tracking Techniques for Photovoltaic Energy Production Systems. In Renewable Energy Devices and Systems with Simulations in MATLAB® and ANSYS®; CRC Press: Boca Raton, FL, USA, 2017; pp. 91–130. [Google Scholar]
- Ishaque, K.; Salam, Z. A Review of Maximum Power Point Tracking Techniques of PV System for Uniform Insolation and Partial Shading Condition. Renew. Sustain. Energy Rev. 2013, 19, 475–488. [Google Scholar] [CrossRef]
- Lyden, S.; Haque, M.E. Maximum Power Point Tracking Techniques for Photovoltaic Systems: A Comprehensive Review and Comparative Analysis. Renew. Sustain. Energy Rev. 2015, 52, 1504–1518. [Google Scholar] [CrossRef]
- Liu, Y.-H.; Chen, J.-H.; Huang, J.-W. A Review of Maximum Power Point Tracking Techniques for Use in Partially Shaded Conditions. Renew. Sustain. Energy Rev. 2015, 41, 436–453. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Kok Soon, T.; Jamei, E.; Thirunavukkarasu, G.S.; Horan, B.; Mekhilef, S.; Stojcevski, A. Maximum Power Point Tracking for Photovoltaic Systems under Partial Shading Conditions Using Bat Algorithm. Sustainability 2018, 10, 1347. [Google Scholar] [CrossRef]
- Salam, Z.; Ahmed, J.; Merugu, B.S. The Application of Soft Computing Methods for MPPT of PV System: A Technological and Status Review. Appl. Energy 2013, 107, 135–148. [Google Scholar] [CrossRef]
- Kumar Dash, S.; Nema, S.; Nema, R.K.; Verma, D. A Comprehensive Assessment of Maximum Power Point Tracking Techniques under Uniform and Non-Uniform Irradiance and Its Impact on Photovoltaic Systems: A Review. J. Renew. Sustain. Energy 2015, 7, 063113. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Chiaberge, M. An Intelligent Control Strategy of Fractional Short Circuit Current Maximum Power Point Tracking Technique for Photovoltaic Applications. J. Renew. Sustain. Energy 2015, 7, 013114. [Google Scholar] [CrossRef]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New Sensorless Hybrid MPPT Algorithm Based on Fractional Short-Circuit Current Measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar]
- Baimel, D.; Tapuchi, S.; Levron, Y.; Belikov, J. Improved Fractional Open Circuit Voltage MPPT Methods for PV Systems. Electronics 2019, 8, 321. [Google Scholar] [CrossRef]
- Farayola, A.M.; Hasan, A.N.; Ali, A. Curve Fitting Polynomial Technique Compared to ANFIS Technique for Maximum Power Point Tracking. In Proceedings of the 2017 8th International Renewable Energy Congress (IREC), Amman, Jordan, 21–23 March 2017; pp. 1–6. [Google Scholar]
- Lasheen, M.; Rahman, A.K.A.; Abdel-Salam, M.; Ookawara, S. Performance Enhancement of Constant Voltage Based MPPT for Photovoltaic Applications Using Genetic Algorithm. Energy Procedia 2016, 100, 217–222. [Google Scholar] [CrossRef]
- Jately, V.; Azzopardi, B.; Joshi, J.; Sharma, A.; Arora, S. Experimental Analysis of Hill-Climbing MPPT Algorithms under Low Irradiance Levels. Renew. Sustain. Energy Rev. 2021, 150, 111467. [Google Scholar] [CrossRef]
- Al-Dhaifallah, M.; Nassef, A.M.; Rezk, H.; Nisar, K.S. Optimal Parameter Design of Fractional Order Control Based INC-MPPT for PV System. Solar Energy 2018, 159, 650–664. [Google Scholar] [CrossRef]
- Ferdous, S.M.; Shafiullah, G.M.; Oninda, M.A.M.; Shoeb, M.A.; Jamal, T. Close Loop Compensation Technique for High Performance MPPT Using Ripple Correlation Control. In Proceedings of the 2017 Australasian Universities Power Engineering Conference (AUPEC), Melbourne, VIC, Australia, 19–22 November 2017; pp. 1–6. [Google Scholar]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Pandey, A.; Dasgupta, N.; Mukerjee, A.K. High-Performance Algorithms for Drift Avoidance and Fast Tracking in Solar MPPT System. IEEE Trans. Energy Convers. 2008, 23, 681–689. [Google Scholar] [CrossRef]
- Li, J.; Wang, H. A Novel Stand-Alone PV Generation System Based on Variable Step Size INC MPPT and SVPWM Control. In Proceedings of the 2009 IEEE 6th International Power Electronics and Motion Control Conference, Wuhan, China, 17–20 May 2009; pp. 2155–2160. [Google Scholar]
- Liu, F.; Kang, Y.; Zhang, Y.; Duan, S. Comparison of P&O and Hill Climbing MPPT Methods for Grid-Connected PV Converter. In Proceedings of the 2008 3rd IEEE Conference on Industrial Electronics and Applications, Singapore, 3–5 June 2008; pp. 804–807. [Google Scholar]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. High-Performance Adaptive Perturb and Observe MPPT Technique for Photovoltaic-Based Microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Zainuri, M.A.A.M.; Radzi, M.A.M.; Che Soh, A.; Rahim, N.A. Development of Adaptive Perturb and Observe-Fuzzy Control Maximum Power Point Tracking for Photovoltaic Boost Dc–Dc Converter. IET Renew. Power Gener. 2014, 8, 183–194. [Google Scholar] [CrossRef]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A Variable Step Size INC MPPT Method for PV Systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Xiao, W.; Dunford, W.G. A Modified Adaptive Hill Climbing MPPT Method for Photovoltaic Power Systems. In Proceedings of the 2004 IEEE 35th Annual Power Electronics Specialists Conference (IEEE Cat. No. 04CH37551), Aachen, Germany, 20–25 June 2004; Volume 3, pp. 1957–1963. [Google Scholar]
- Ali, A.; Irshad, K.; Khan, M.; Hossain, M.; Al-Duais, I.; Malik, M. Artificial Intelligence and Bio-Inspired Soft Computing-Based Maximum Power Plant Tracking for a Solar Photovoltaic System under Non-Uniform Solar Irradiance Shading Conditions—A Review. Sustainability 2021, 13, 10575. [Google Scholar] [CrossRef]
- Alaraj, M.; Kumar, A.; Alsaidan, I.; Rizwan, M.; Jamil, M. An Advanced and Robust Approach to Maximize Solar Photovoltaic Power Production. Sustainability 2022, 14, 7398. [Google Scholar] [CrossRef]
- Ghazi, G.; Hasanien, H.; Al-Ammar, E.; Turky, R.; Ko, W.; Park, S.; Choi, H. African Vulture Optimization Algorithm-Based PI Controllers for Performance Enhancement of Hybrid Renewable-Energy Systems. Sustainability 2022, 14, 8172. [Google Scholar] [CrossRef]
- Punitha, K.; Devaraj, D.; Sakthivel, S. Artificial Neural Network Based Modified Incremental Conductance Algorithm for Maximum Power Point Tracking in Photovoltaic System under Partial Shading Conditions. Energy 2013, 62, 330–340. [Google Scholar] [CrossRef]
- Elobaid, L.M.; Abdelsalam, A.K.; Zakzouk, E.E. Artificial Neural Network-Based Photovoltaic Maximum Power Point Tracking Techniques: A Survey. IET Renew. Power Gener. 2015, 9, 1043–1063. [Google Scholar] [CrossRef]
- Srinivasan, S.; Tiwari, R.; Krishnamoorthy, M.; Lalitha, M.P.; Raj, K.K. Neural Network Based MPPT Control with Reconfigured Quadratic Boost Converter for Fuel Cell Application. Int. J. Hydrog. Energy 2021, 46, 6709–6719. [Google Scholar] [CrossRef]
- Liu, C.-L.; Chen, J.-H.; Liu, Y.-H.; Yang, Z.-Z. An Asymmetrical Fuzzy-Logic-Control-Based MPPT Algorithm for Photovoltaic Systems. Energies 2014, 7, 2177–2193. [Google Scholar] [CrossRef] [Green Version]
- Tang, S.; Sun, Y.; Chen, Y.; Zhao, Y.; Yang, Y.; Szeto, W. An Enhanced MPPT Method Combining Fractional-Order and Fuzzy Logic Control. IEEE J. Photovolt. 2017, 7, 640–650. [Google Scholar] [CrossRef]
- Aly, M.; Rezk, H. An Improved Fuzzy Logic Control-Based MPPT Method to Enhance the Performance of PEM Fuel Cell System. Neural Comput. Appl. 2022, 34, 4555–4566. [Google Scholar]
- Cheng, P.-C.; Peng, B.-R.; Liu, Y.-H.; Cheng, Y.-S.; Huang, J.-W. Optimization of a Fuzzy-Logic-Control-Based MPPT Algorithm Using the Particle Swarm Optimization Technique. Energies 2015, 8, 5338–5360. [Google Scholar] [CrossRef]
- González-Castaño, C.; Restrepo, C.; Kouro, S.; Rodriguez, J. MPPT Algorithm Based on Artificial Bee Colony for PV System. IEEE Access 2021, 9, 43121–43133. [Google Scholar] [CrossRef]
- Soufyane Benyoucef, A.; Chouder, A.; Kara, K.; Silvestre, S. Artificial Bee Colony Based Algorithm for Maximum Power Point Tracking (MPPT) for PV Systems Operating under Partial Shaded Conditions. Appl. Soft Comput. 2015, 32, 38–48. [Google Scholar] [CrossRef]
- Tajuddin, M.F.N.; Ayob, S.M.; Salam, Z.; Saad, M.S. Evolutionary Based Maximum Power Point Tracking Technique Using Differential Evolution Algorithm. Energy Build. 2013, 67, 245–252. [Google Scholar]
- Ramasamy, S.; Dash, S.S.; Selvan, T. An Intelligent Differential Evolution Based Maximum Power Point Tracking (MPPT) Technique for Partially Shaded Photo Voltaic (PV) Array. Int. J. Adv. Soft Comput. Its Appl. 2014, 6, 1–16. [Google Scholar]
- Koad, R.B.; Zobaa, A.F.; El-Shahat, A. A Novel MPPT Algorithm Based on Particle Swarm Optimization for Photovoltaic Systems. IEEE Trans. Sustain. Energy 2016, 8, 468–476. [Google Scholar] [CrossRef]
- Khare, A.; Rangnekar, S. A Review of Particle Swarm Optimization and Its Applications in Solar Photovoltaic System. Appl. Soft Comput. 2013, 13, 2997–3006. [Google Scholar] [CrossRef]
- Ishaque, K.; Salam, Z.; Amjad, M.; Mekhilef, S. An Improved Particle Swarm Optimization (PSO)–Based MPPT for PV with Reduced Steady-State Oscillation. IEEE Trans. Power Electron. 2012, 27, 3627–3638. [Google Scholar] [CrossRef]
- Li, H.; Yang, D.; Su, W.; Lü, J.; Yu, X. An Overall Distribution Particle Swarm Optimization MPPT Algorithm for Photovoltaic System under Partial Shading. IEEE Trans. Ind. Electron. 2018, 66, 265–275. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Palani, S. Application of a Combined Particle Swarm Optimization and Perturb and Observe Method for MPPT in PV Systems under Partial Shading Conditions. Renew. Energy 2015, 75, 308–317. [Google Scholar] [CrossRef]
- Luta, D.N.; Raji, A.K. Fuzzy Rule-Based and Particle Swarm Optimisation MPPT Techniques for a Fuel Cell Stack. Energies 2019, 12, 936. [Google Scholar] [CrossRef] [Green Version]
- Jouda, A.; Elyes, F.; Rabhi, A.; Abdelkader, M. Optimization of Scaling Factors of Fuzzy–MPPT Controller for Stand-Alone Photovoltaic System by Particle Swarm Optimization. Energy Procedia 2017, 111, 954–963. [Google Scholar] [CrossRef]
- Ahmed, J.; Salam, Z. A Maximum Power Point Tracking (MPPT) for PV System Using Cuckoo Search with Partial Shading Capability. Appl. Energy 2014, 119, 118–130. [Google Scholar]
- Ahmed, J.; Salam, Z. A Soft Computing MPPT for PV System Based on Cuckoo Search Algorithm. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 558–562. [Google Scholar]
- Kulaksız, A.A.; Akkaya, R. A Genetic Algorithm Optimized ANN-Based MPPT Algorithm for a Stand-Alone PV System with Induction Motor Drive. Sol. Energy 2012, 86, 2366–2375. [Google Scholar] [CrossRef]
- Daraban, S.; Petreus, D.; Morel, C. A Novel MPPT (Maximum Power Point Tracking) Algorithm Based on a Modified Genetic Algorithm Specialized on Tracking the Global Maximum Power Point in Photovoltaic Systems Affected by Partial Shading. Energy 2014, 74, 374–388. [Google Scholar] [CrossRef]
- Kumar, P.; Jain, G.; Palwalia, D.K. Genetic Algorithm Based Maximum Power Tracking in Solar Power Generation. In Proceedings of the 2015 International Conference on Power and Advanced Control Engineering (ICPACE), Bengaluru, India, 12–14 August 2015; pp. 1–6. [Google Scholar]
- Hadji, S.; Gaubert, J.-P.; Krim, F. Real-Time Genetic Algorithms-Based MPPT: Study and Comparison (Theoretical an Experimental) with Conventional Methods. Energies 2018, 11, 459. [Google Scholar] [CrossRef]
- Hadji, S.; Gaubert, J.-P.; Krim, F. Theoretical and Experimental Analysis of Genetic Algorithms Based MPPT for PV Systems. Energy Procedia 2015, 74, 772–787. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Peddapati, S.; Palani, S. MPPT of PV Systems under Partial Shaded Conditions through a Colony of Flashing Fireflies. IEEE Trans. Energy Convers. 2014, 29, 463–472. [Google Scholar]
- Titri, S.; Larbes, C.; Toumi, K.Y.; Benatchba, K. A New MPPT Controller Based on the Ant Colony Optimization Algorithm for Photovoltaic Systems under Partial Shading Conditions. Appl. Soft Comput. 2017, 58, 465–479. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Ramachandaramurthy, V.K.; Padmanaban, S.; Azam, F. An Ant Colony Optimized MPPT for Standalone Hybrid PV-Wind Power System with Single Cuk Converter. Energies 2019, 12, 167. [Google Scholar] [CrossRef]
- Zhou, L.; Chen, Y.; Liu, Q.; Wu, J. Maximum Power Point Tracking (MPPT) Control of a Photovoltaic System Based on Dual Carrier Chaotic Search. J. Control. Theory Appl. 2012, 10, 244–250. [Google Scholar]
- Chen, M.; Ma, S.; Wu, J.; Huang, L. Analysis of MPPT Failure and Development of an Augmented Nonlinear Controller for MPPT of Photovoltaic Systems under Partial Shading Conditions. Appl. Sci. 2017, 7, 95. [Google Scholar] [CrossRef]
- Sundareswaran, K.; Peddapati, S.; Palani, S. Application of Random Search Method for Maximum Power Point Tracking in Partially Shaded Photovoltaic Systems. IET Renew. Power Gener. 2014, 8, 670–678. [Google Scholar] [CrossRef]
- Ramaprabha, R.; Balaji, M.; Mathur, B.L. Maximum Power Point Tracking of Partially Shaded Solar PV System Using Modified Fibonacci Search Method with Fuzzy Controller. Int. J. Electr. Power Energy Syst. 2012, 43, 754–765. [Google Scholar] [CrossRef]
- Dallago, E.; Liberale, A.; Miotti, D.; Venchi, G. Direct MPPT Algorithm for PV Sources with Only Voltage Measurements. IEEE Trans. Power Electron. 2015, 30, 6742–6750. [Google Scholar] [CrossRef]
- Pilakkat, D.; Kanthalakshmi, S. An Improved P&O Algorithm Integrated with Artificial Bee Colony for Photovoltaic Systems under Partial Shading Conditions. Sol. Energy 2019, 178, 37–47. [Google Scholar]
- Ibnelouad, A.; El Kari, A.; Ayad, H.; Mjahed, M. Improved Cooperative Artificial Neural Network-Particle Swarm Optimization Approach for Solar Photovoltaic Systems Using Maximum Power Point Tracking. Int. Trans. Electr. Energy Syst. 2020, 30, e12439. [Google Scholar] [CrossRef]
- Da Rocha, M.V.; Sampaio, L.P.; da Silva, S.A.O. Comparative Analysis of MPPT Algorithms Based on Bat Algorithm for PV Systems under Partial Shading Condition. Sustain. Energy Technol. Assess. 2020, 40, 100761. [Google Scholar] [CrossRef]
- Guo, K.; Cui, L.; Mao, M.; Zhou, L.; Zhang, Q. An Improved Gray Wolf Optimizer MPPT Algorithm for PV System with BFBIC Converter under Partial Shading. IEEE Access 2020, 8, 103476–103490. [Google Scholar]
- Khan, N.M.; Mansoor, M.; Mirza, A.F.; Moosavi, S.K.R.; Qadir, Z.; Zafar, M.H. Energy Harvesting and Stability Analysis of Centralized TEG System under Non-Uniform Temperature Distribution. Sustain. Energy Technol. Assess. 2022, 52, 102028. [Google Scholar]
- Ram, J.P.; Babu, T.S.; Rajasekar, N. A Comprehensive Review on Solar PV Maximum Power Point Tracking Techniques. Renew. Sustain. Energy Rev. 2017, 67, 826–847. [Google Scholar]
- Bollipo, R.B.; Mikkili, S.; Bonthagorla, P.K. Critical Review on PV MPPT Techniques: Classical, Intelligent and Optimisation. IET Renew. Power Gener. 2020, 14, 1433–1452. [Google Scholar]
- Pathy, S.; Subramani, C.; Sridhar, R.; Thamizh Thentral, T.M.; Padmanaban, S. Nature-Inspired MPPT Algorithms for Partially Shaded PV Systems: A Comparative Study. Energies 2019, 12, 1451. [Google Scholar] [CrossRef]
- Ali, A.; Almutairi, K.; Malik, M.Z.; Irshad, K.; Tirth, V.; Algarni, S.; Zahir, M.H.; Islam, S.; Shafiullah, M.; Shukla, N.K. Review of Online and Soft Computing Maximum Power Point Tracking Techniques under Non-Uniform Solar Irradiation Conditions. Energies 2020, 13, 3256. [Google Scholar] [CrossRef]
- Derbeli, M.; Napole, C.; Barambones, O.; Sanchez, J.; Calvo, I.; Fernández-Bustamante, P. Maximum Power Point Tracking Techniques for Photovoltaic Panel: A Review and Experimental Applications. Energies 2021, 14, 7806. [Google Scholar] [CrossRef]
- Laxman, B.; Annamraju, A.; Srikanth, N.V. A Grey Wolf Optimized Fuzzy Logic Based MPPT for Shaded Solar Photovoltaic Systems in Microgrids. Int. J. Hydrog. Energy 2021, 46, 10653–10665. [Google Scholar]
- Gao, L.; Dougal, R.A.; Liu, S.; Iotova, A.P. Parallel-Connected Solar PV System to Address Partial and Rapidly Fluctuating Shadow Conditions. IEEE Trans. Ind. Electron. 2009, 56, 1548–1556. [Google Scholar]
- Hashim, N.; Salam, Z. Critical Evaluation of Soft Computing Methods for Maximum Power Point Tracking Algorithms of Photovoltaic Systems. Int. J. Power Electron. Drive Syst. 2019, 10, 548. [Google Scholar] [CrossRef]
- Verma, D.; Nema, S.; Shandilya, A.M.; Dash, S.K. Comprehensive Analysis of Maximum Power Point Tracking Techniques in Solar Photovoltaic Systems under Uniform Insolation and Partial Shaded Condition. J. Renew. Sustain. Energy 2015, 7, 042701. [Google Scholar] [CrossRef]
- Yan, K.; Shen, H.; Wang, L.; Zhou, H.; Xu, M.; Mo, Y. Short-Term Solar Irradiance Forecasting Based on a Hybrid Deep Learning Methodology. Information 2020, 11, 32. [Google Scholar] [CrossRef]
- Santana, E.; Silva, R.; Zarpelão, B.; Barbon Junior, S. Detecting and Mitigating Adversarial Examples in Regression Tasks: A Photovoltaic Power Generation Forecasting Case Study. Information 2021, 12, 394. [Google Scholar] [CrossRef]
- Hajiabadi, M.; Farhadi, M.; Babaiyan, V.; Estebsari, A. Deep Learning with Loss Ensembles for Solar Power Prediction in Smart Cities. Smart Cities 2020, 3, 842–852. [Google Scholar] [CrossRef]
- Pinna, A.; Massidda, L. A Procedure for Complete Census Estimation of Rooftop Photovoltaic Potential in Urban Areas. Smart Cities 2020, 3, 873–893. [Google Scholar] [CrossRef]
- Rajalakshmi, M.; Chandramohan, S.; Kannadasan, R.; Alsharif, M.H.; Kim, M.-K.; Nebhen, J. Design and Validation of BAT Algorithm-Based Photovoltaic System Using Simplified High Gain Quasi Boost Inverter. Energies 2021, 14, 1086. [Google Scholar] [CrossRef]
- Alturki, F.A.; Al-Shamma’a, A.; MH Farh, H. Simulations and dSPACE Real-Time Implementation of Photovoltaic Global Maximum Power Extraction under Partial Shading. Sustainability 2020, 12, 3652. [Google Scholar] [CrossRef]
- Almutairi, A.; Abo-Khalil, A.; Sayed, K.; Albagami, N. MPPT for a PV Grid-Connected System to Improve Efficiency under Partial Shading Conditions. Sustainability 2020, 12, 10310. [Google Scholar] [CrossRef]
- Islam, H.; Mekhilef, S.; Shah, N.; Soon, T.; Wahyudie, A.; Ahmed, M. Improved Proportional-Integral Coordinated MPPT Controller with Fast Tracking Speed for Grid-Tied PV Systems under Partially Shaded Conditions. Sustainability 2021, 13, 830. [Google Scholar] [CrossRef]
- Pandiyan, P.; Saravanan, S.; Prabaharan, N.; Tiwari, R.; Chinnadurai, T.; Babu, N.; Hossain, E. Implementation of Different MPPT Techniques in Solar PV Tree under Partial Shading Conditions. Sustainability 2021, 13, 7208. [Google Scholar] [CrossRef]
- Nagadurga, T.; Narasimham, P.; Vakula, V. Global Maximum Power Point Tracking of Solar Photovoltaic Strings under Partial Shading Conditions Using Cat Swarm Optimization Technique. Sustainability 2021, 13, 11106. [Google Scholar] [CrossRef]
- Bindi, M.; Corti, F.; Aizenberg, I.; Grasso, F.; Lozito, G.; Luchetta, A.; Piccirilli, M.; Reatti, A. Machine Learning-Based Monitoring of DC-DC Converters in Photovoltaic Applications. Algorithms 2022, 15, 74. [Google Scholar] [CrossRef]
- Alaraj, M.; Dube, A.; Alsaidan, I.; Rizwan, M.; Jamil, M. Design and Development of a Proficient Converter for Solar Photovoltaic Based Sustainable Power Generating System. Sustainability 2021, 13, 2045. [Google Scholar] [CrossRef]
- Kanagaraj, N. Photovoltaic and Thermoelectric Generator Combined Hybrid Energy System with an Enhanced Maximum Power Point Tracking Technique for Higher Energy Conversion Efficiency. Sustainability 2021, 13, 3144. [Google Scholar] [CrossRef]
- Kedika, N.R.; Bhukya, L.; Punna, S.; Motamarri, R. Single-Phase Seven-Level Inverter with Multilevel Boost Converter for Solar Photovoltaic Systems. In Proceedings of the 2022 Second International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 1–3 March 2022; pp. 1–6. [Google Scholar]
- Vitorino, M.A.; Hartmann, L.V.; Lima, A.M.; Corrêa, M.B. Using the Model of the Solar Cell for Determining the Maximum Power Point of Photovoltaic Systems. In Proceedings of the 2007 European Conference on Power Electronics and Applications, Aalborg, Denmark, 2–5 September 2007; pp. 1–10. [Google Scholar]
- Ali, A.; Almutairi, K.; Padmanaban, S.; Tirth, V.; Algarni, S.; Irshad, K.; Islam, S.; Zahir, M.H.; Shafiullah, M.; Malik, M.Z. Investigation of MPPT Techniques under Uniform and Non-Uniform Solar Irradiation Condition–a Retrospection. IEEE Access 2020, 8, 127368–127392. [Google Scholar] [CrossRef]
- Fapi, C.B.N.; Wira, P.; Kamta, M.; Tchakounté, H.; Colicchio, B. Simulation and DSPACE Hardware Implementation of an Improved Fractional Short-Circuit Current MPPT Algorithm for Photovoltaic System. Appl. Sol. Energy 2021, 57, 93–106. [Google Scholar]
- Bu, L.; Quan, S.; Han, J.; Li, F.; Li, Q.; Wang, X. On-Site Traversal Fractional Open Circuit Voltage with Uninterrupted Output Power for Maximal Power Point Tracking of Photovoltaic Systems. Electronics 2020, 9, 1802. [Google Scholar] [CrossRef]
- Salas, V.; Olias, E.; Barrado, A.; Lazaro, A. Review of the Maximum Power Point Tracking Algorithms for Stand-Alone Photovoltaic Systems. Sol. Energy Mater. Sol. Cells 2006, 90, 1555–1578. [Google Scholar] [CrossRef]
- Yilmaz, U.; Kircay, A.; Borekci, S. PV System Fuzzy Logic MPPT Method and PI Control as a Charge Controller. Renew. Sustain. Energy Rev. 2018, 81, 994–1001. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Simulation and Hardware Implementation of Incremental Conductance MPPT with Direct Control Method Using Cuk Converter. IEEE Trans. Ind. Electron. 2010, 58, 1154–1161. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. A Technique for Improving P&O MPPT Performances of Double-Stage Grid-Connected Photovoltaic Systems. IEEE Trans. Ind. Electron. 2009, 56, 4473–4482. [Google Scholar]
- Ahmed, J.; Salam, Z. An Enhanced Adaptive P&O MPPT for Fast and Efficient Tracking under Varying Environmental Conditions. IEEE Trans. Sustain. Energy 2018, 9, 1487–1496. [Google Scholar]
- Tsang, K.M.; Chan, W.L. Maximum Power Point Tracking for PV Systems under Partial Shading Conditions Using Current Sweeping. Energy Convers. Manag. 2015, 93, 249–258. [Google Scholar] [CrossRef]
- Matsuura, M.; Nomoto, H.; Mamiya, H.; Higuchi, T.; Masson, D.; Fafard, S. Over 40-W Electric Power and Optical Data Transmission Using an Optical Fiber. IEEE Trans. Power Electron. 2020, 36, 4532–4539. [Google Scholar] [CrossRef]
- Brunton, S.L.; Rowley, C.W.; Kulkarni, S.R.; Clarkson, C. Maximum Power Point Tracking for Photovoltaic Optimization Using Ripple-Based Extremum Seeking Control. IEEE Trans. Power Electron. 2010, 25, 2531–2540. [Google Scholar] [CrossRef]
- Yau, H.-T.; Wu, C.-H. Comparison of Extremum-Seeking Control Techniques for Maximum Power Point Tracking in Photovoltaic Systems. Energies 2011, 4, 2180–2195. [Google Scholar] [CrossRef]
- Kimball, J.W.; Krein, P.T. Discrete-Time Ripple Correlation Control for Maximum Power Point Tracking. IEEE Trans. Power Electron. 2008, 23, 2353–2362. [Google Scholar] [CrossRef]
- Shiau, J.; Wei, Y.; Chen, B. A Study on the Fuzzy-Logic-Based Solar Power MPPT Algorithms Using Different Fuzzy Input Variables. Algorithms 2015, 8, 100–127. [Google Scholar] [CrossRef]
- Remoaldo, D.; Jesus, I. Analysis of a Traditional and a Fuzzy Logic Enhanced Perturb and Observe Algorithm for the MPPT of a Photovoltaic System. Algorithms 2021, 14, 24. [Google Scholar] [CrossRef]
- Sheraz, M.; Abido, M.A. An Efficient MPPT Controller Using Differential Evolution and Neural Network. In Proceedings of the 2012 IEEE International Conference on Power and Energy (PECon), Kota Kinabalu, Malaysia, 2–5 December 2012; pp. 378–383. [Google Scholar]
- Bhukya, L.; Nandiraju, S. A Novel Photovoltaic Maximum Power Point Tracking Technique Based on Grasshopper Optimized Fuzzy Logic Approach. Int. J. Hydrog. Energy 2020, 45, 9416–9427. [Google Scholar] [CrossRef]
- Rezaei, H.; Bozorg-Haddad, O.; Chu, X. Grey Wolf Optimization (GWO) Algorithm. In Advanced Optimization by Nature-Inspired Algorithms; Springer: Berlin/Heidelberg, Germany, 2018; pp. 81–91. [Google Scholar]
- Rao, R.V.; Saroj, A. A Self-Adaptive Multi-Population Based Jaya Algorithm for Engineering Optimization. Swarm Evol. Comput. 2017, 37, 1–26. [Google Scholar]
- Rao, R.V.; More, K.; Taler, J.; Oc\loń, P. Dimensional Optimization of a Micro-Channel Heat Sink Using Jaya Algorithm. Appl. Therm. Eng. 2016, 103, 572–582. [Google Scholar] [CrossRef]
- Warid, W.; Hizam, H.; Mariun, N.; Abdul-Wahab, N.I. Optimal Power Flow Using the Jaya Algorithm. Energies 2016, 9, 678. [Google Scholar] [CrossRef]
- Bhukya, L.; Annamraju, A.; Nandiraju, S. A Novel Maximum Power Point Tracking Technique Based on Rao-1 Algorithm for Solar PV System under Partial Shading Conditions. Int. Trans. Electr. Energy Syst. 2021, 31, e13028. [Google Scholar] [CrossRef]
- Rao, R.V.; Rai, D.P.; Balic, J. Surface Grinding Process Optimization Using Jaya Algorithm. In Computational Intelligence in Data Mining—Volume 2; Springer: Berlin/Heidelberg, Germany, 2016; pp. 487–495. [Google Scholar]















| MPPT Technique | Parameter Dependency | Control Variable | Circuitry | Parameter Tuning | Tracking Accuracy | Efficiency | Complexity | ||
|---|---|---|---|---|---|---|---|---|---|
| V | I | A | D | ||||||
| CF | Yes | ✓ | ✓ | ✓ | Yes | Medium | Medium | Complex | |
| Lookup table | Yes | ✓ | ✓ | ✓ | No | Low | Medium | Complex | |
| Pilot cell | Yes | ✓ | ✓ | ✓ | No | Low | Low | Simple | |
| FSCC | Yes | ✓ | ✓ | ✓ | No | Low | Low | Simple | |
| FOCV | Yes | ✓ | ✓ | ✓ | No | Low | Low | Simple | |
| Mode | Perturbation | MPP Level | Status |
|---|---|---|---|
| Mode-I | At MPP | Hold VPV = VMPP | |
| Mode-II | Left side of MPP | Increase the voltage until VPV = VMPP | |
| Mode-III | Right side of MPP | Decrease the voltage until VPV = VMPP |
| MPPT Technique | PV Array Dependency | Control Variable | Circuitry | Parameter Tuning | Tracking Accuracy | Efficiency | Complexity | ||
|---|---|---|---|---|---|---|---|---|---|
| V | I | A | D | ||||||
| P&O | No | ✓ | ✓ | ✓ | ✓ | No | Moderate | High | Simple |
| INC | No | ✓ | ✓ | ✓ | No | High | High | Complex | |
| HC | No | ✓ | ✓ | ✓ | ✓ | No | Moderate | High | Simple |
| CS | Yes | ✓ | ✓ | ✓ | ✓ | Yes | Medium | Medium | Complex |
| ESC | No | ✓ | ✓ | ✓ | ✓ | No | High | High | Medium |
| RCC | No | ✓ | ✓ | ✓ | Yes | Moderate | High | Complex | |
| SMC | No | ✓ | ✓ | ✓ | No | Medium | High | Complex | |
| ΔE | ||||||
|---|---|---|---|---|---|---|
| BN | SN | ZE | SP | BP | ||
| E | BN | ZE | ZE | ZE | BN | SP |
| SN | ZE | ZE | SN | SN | SN | |
| ZE | SN | ZE | ZE | ZE | SP | |
| SP | SP | SP | SP | ZE | ZE | |
| BP | BP | BP | BP | ZE | ZE | |
| Type of MPPT Technique | Offline MPPT | Online MPPT | Intelligent MPPT |
|---|---|---|---|
| Tracking speed | High | High | Medium |
| Tracking accuracy | Less | Moderate | High |
| Tracking efficiency | Poor | Medium | Very good |
| Steady-state Oscillations | Less | High | Less |
| GMPPT tracking under PSC | Yes | No | Yes |
| Suitability for high-efficiency operations | No | Yes | Yes |
| Suitability for environmental changing conditions | No | No | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhukya, L.; Kedika, N.R.; Salkuti, S.R. Enhanced Maximum Power Point Techniques for Solar Photovoltaic System under Uniform Insolation and Partial Shading Conditions: A Review. Algorithms 2022, 15, 365. https://doi.org/10.3390/a15100365
Bhukya L, Kedika NR, Salkuti SR. Enhanced Maximum Power Point Techniques for Solar Photovoltaic System under Uniform Insolation and Partial Shading Conditions: A Review. Algorithms. 2022; 15(10):365. https://doi.org/10.3390/a15100365
Chicago/Turabian StyleBhukya, Laxman, Narender Reddy Kedika, and Surender Reddy Salkuti. 2022. "Enhanced Maximum Power Point Techniques for Solar Photovoltaic System under Uniform Insolation and Partial Shading Conditions: A Review" Algorithms 15, no. 10: 365. https://doi.org/10.3390/a15100365