
Evaluation of Early Concrete Damage Caused by Chloride-Induced Steel Corrosion Using a Deep Learning Approach Based on RNN for Ultrasonic Pulse Waves



Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication of Test Specimens
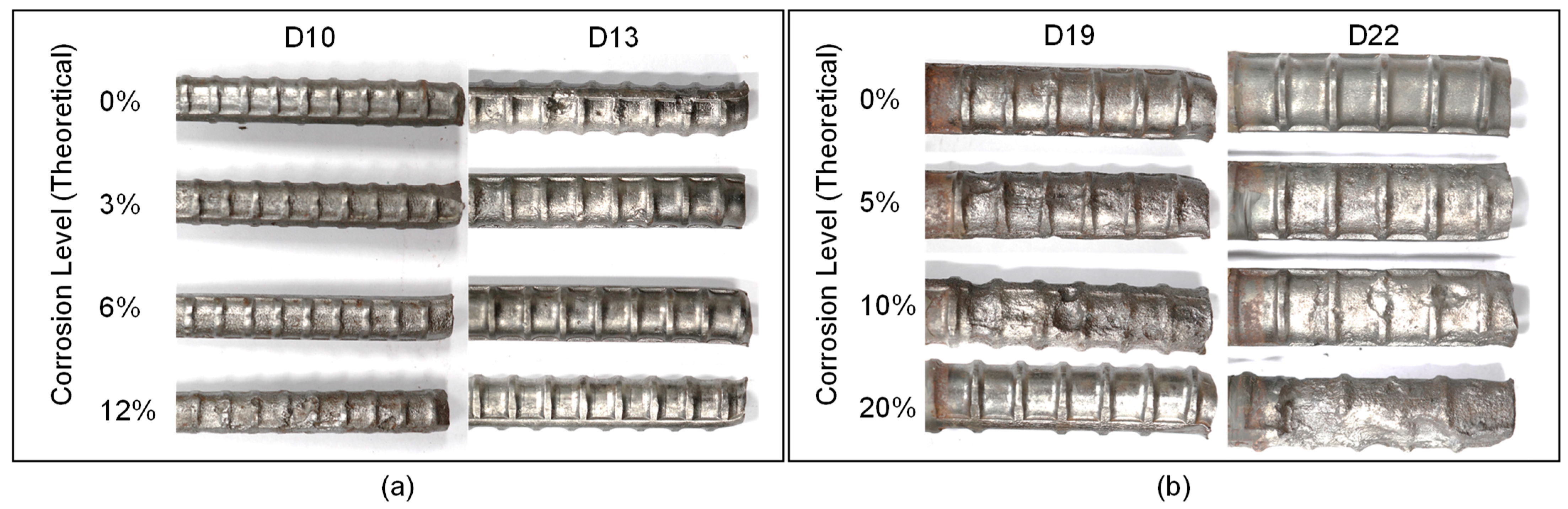
2.2. Accelerated Corrosion Tests
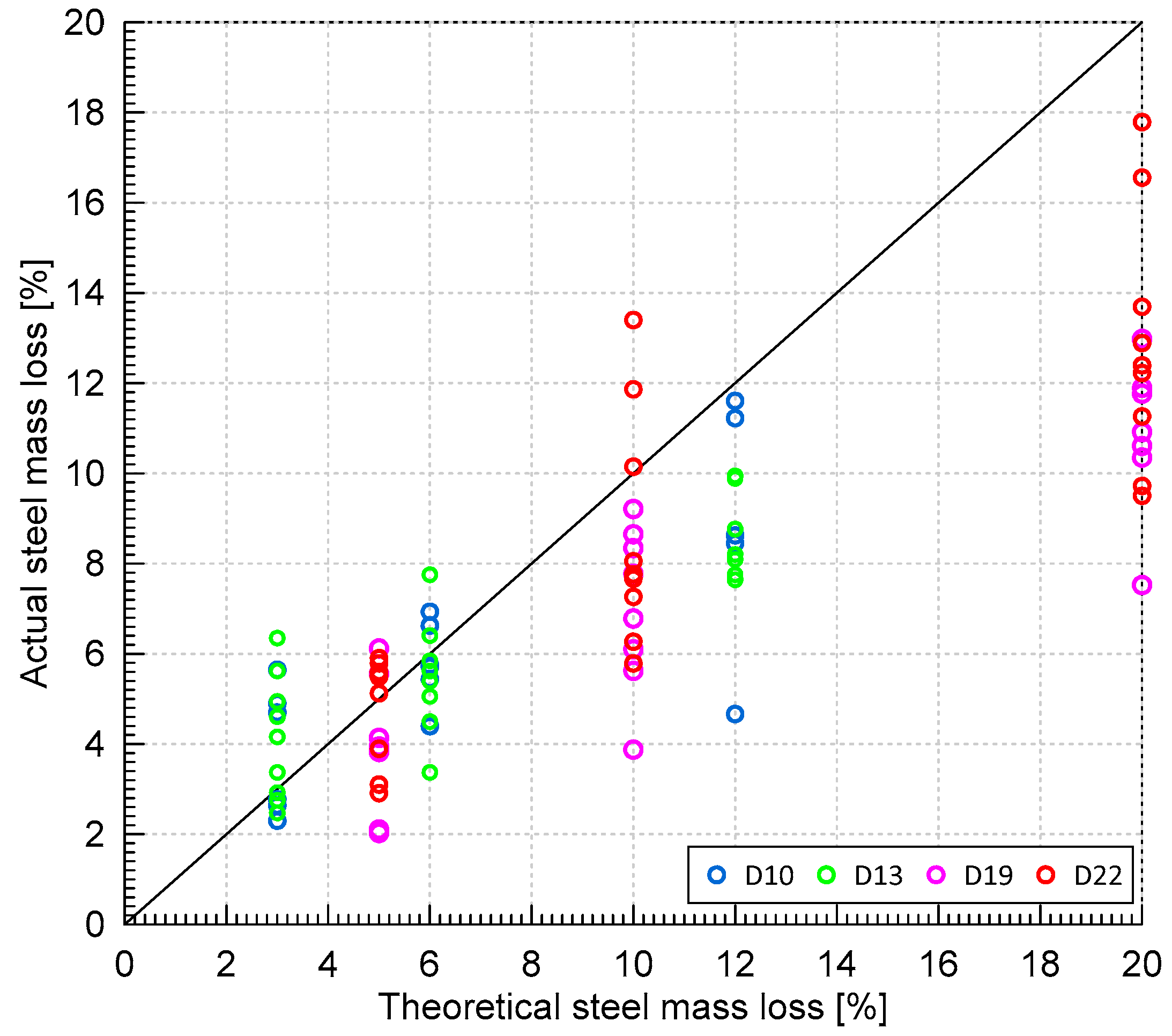
2.3. Steel Mass Loss Ratio
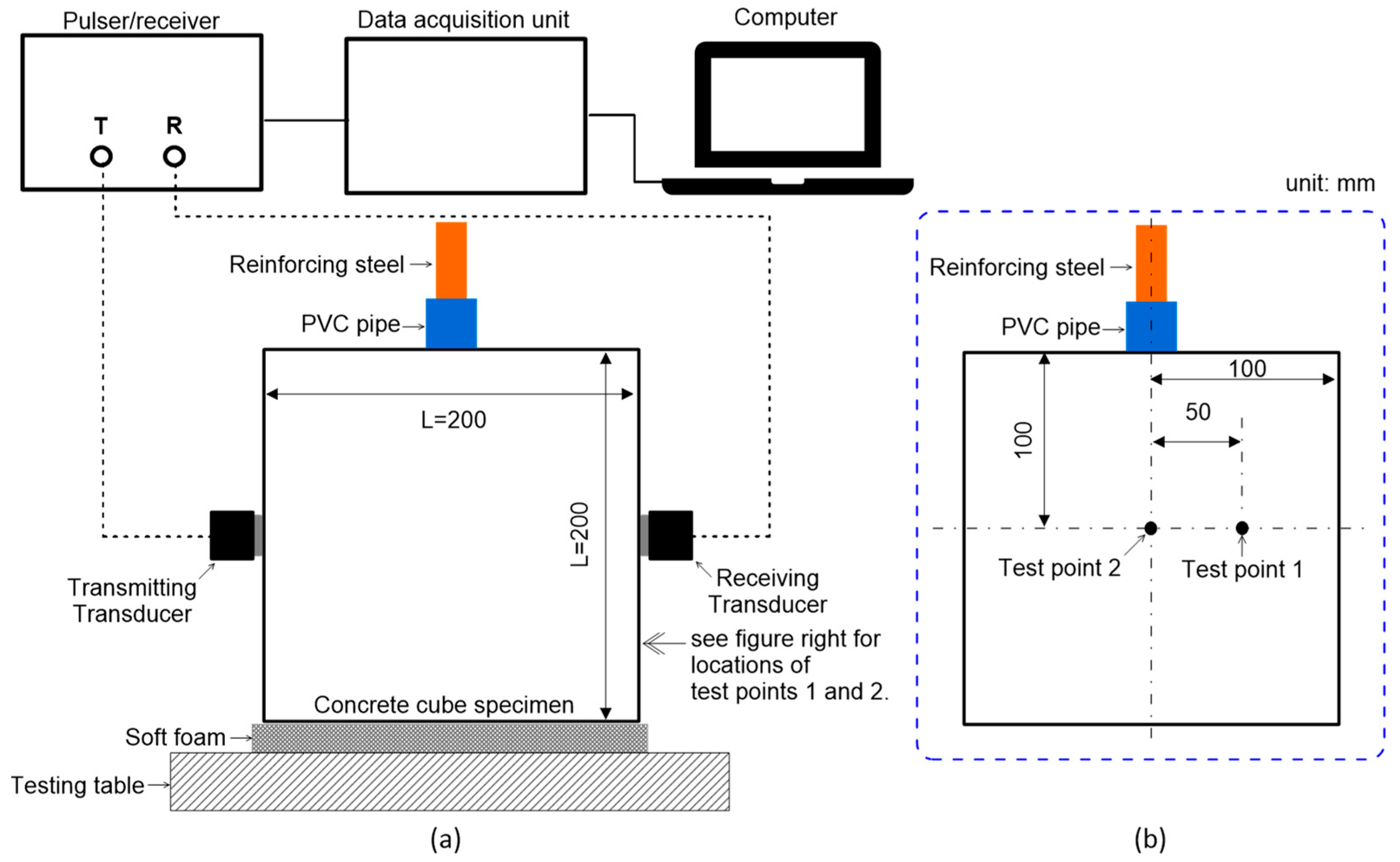
2.4. Ultrasonic Pulse Wave Measurements
3. Recurrent Neural Networks (RNNs) of Ultrasonic Pulse Waves
3.1. Architecture
3.2. Long Short-Term Memory (LSTM)
3.3. Gated Recurrent Unit (GRU)
3.4. Data Preparation
3.5. Bilinear Classification Model
3.6. Performance Evaluation
4. Results and Discussion
4.1. Bilinear Classification Models Based on Conventional Ultrasonic Testing Parameters
4.2. Deep Learning Classification Model
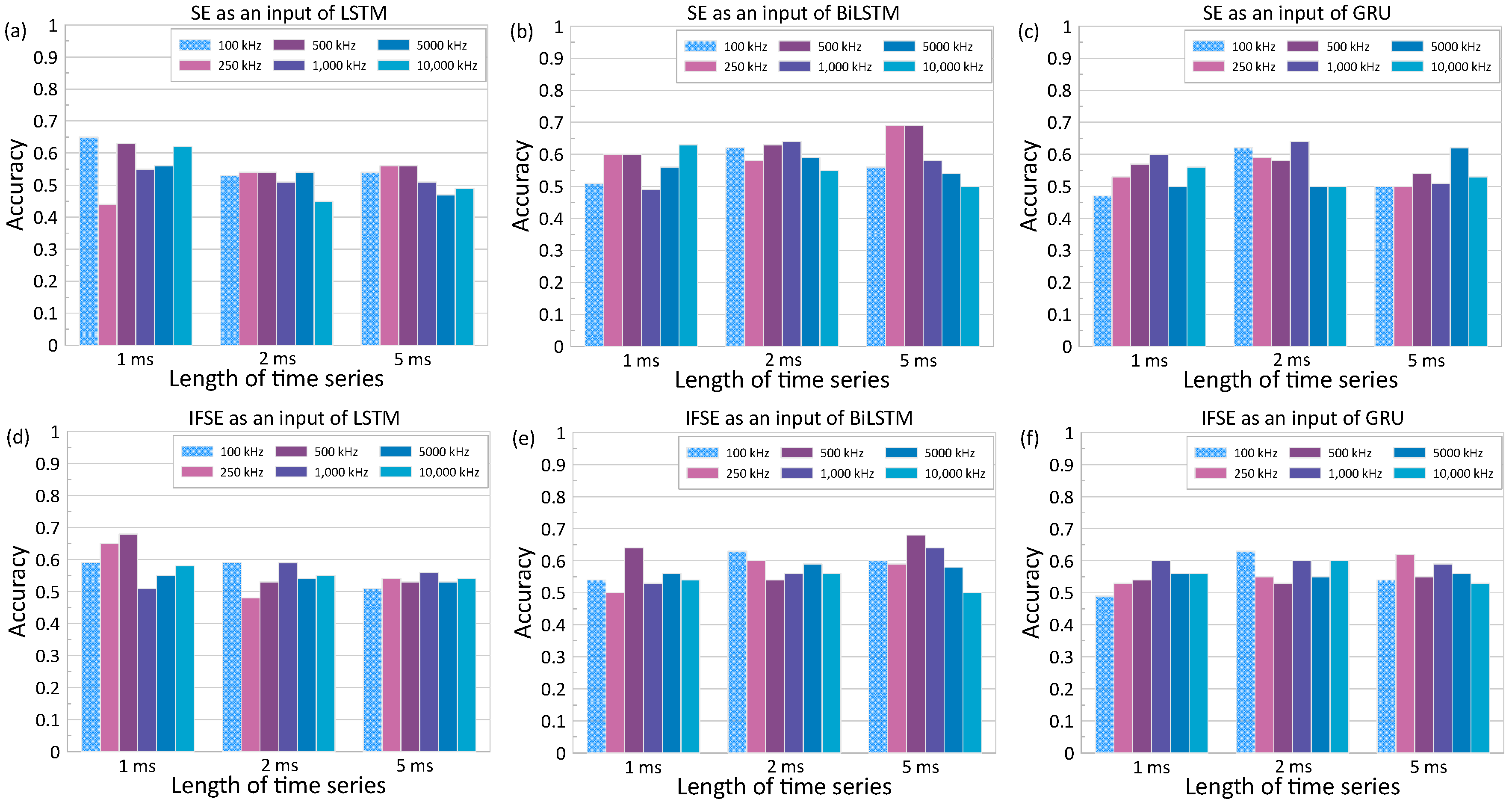
4.2.1. Effects of Input Type
4.2.2. Effects of Input Data
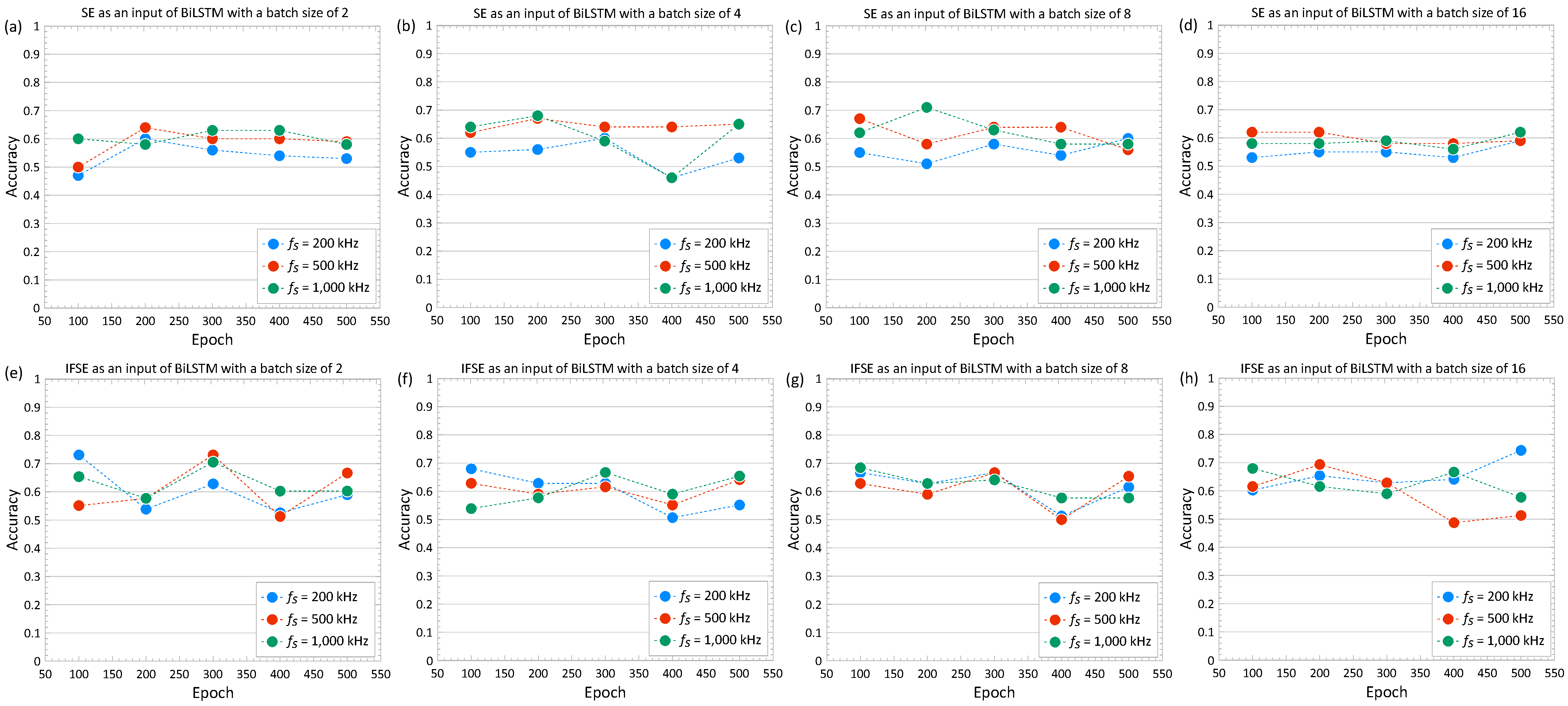
4.2.3. Effects of Hyperparameter
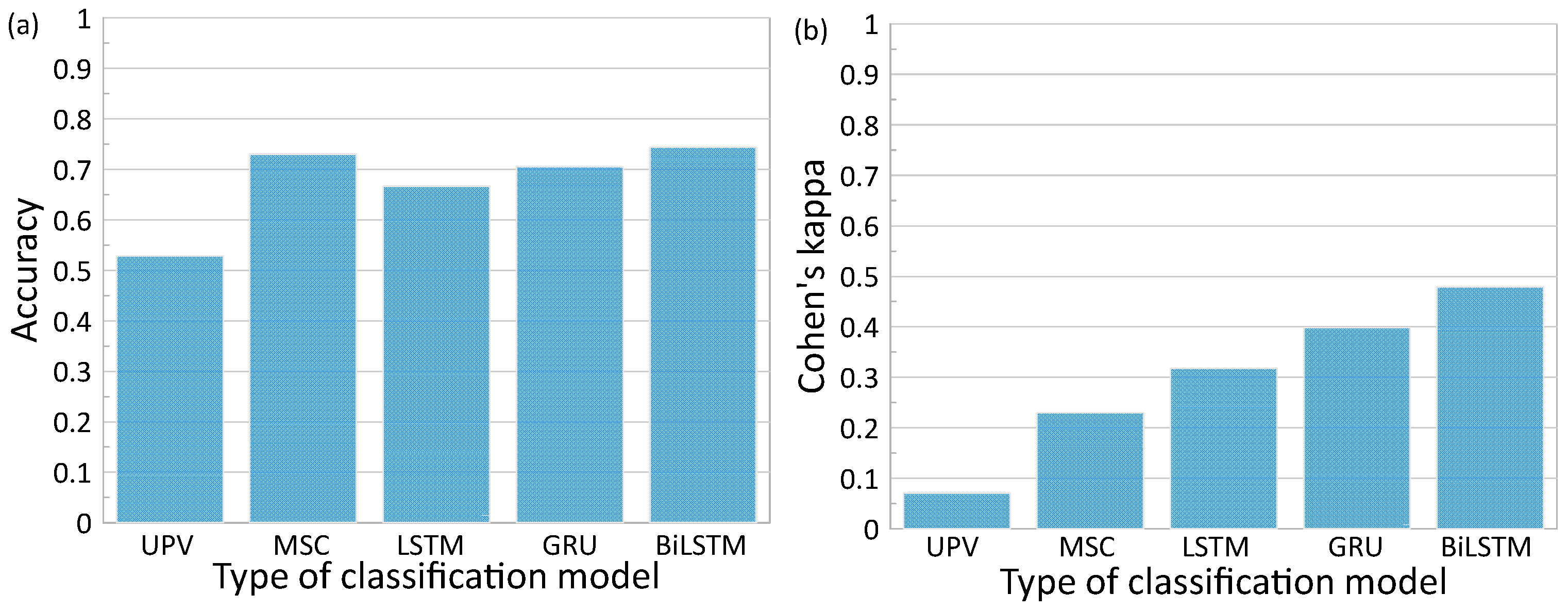
4.3. Performance Comparison of Methods
5. Conclusions
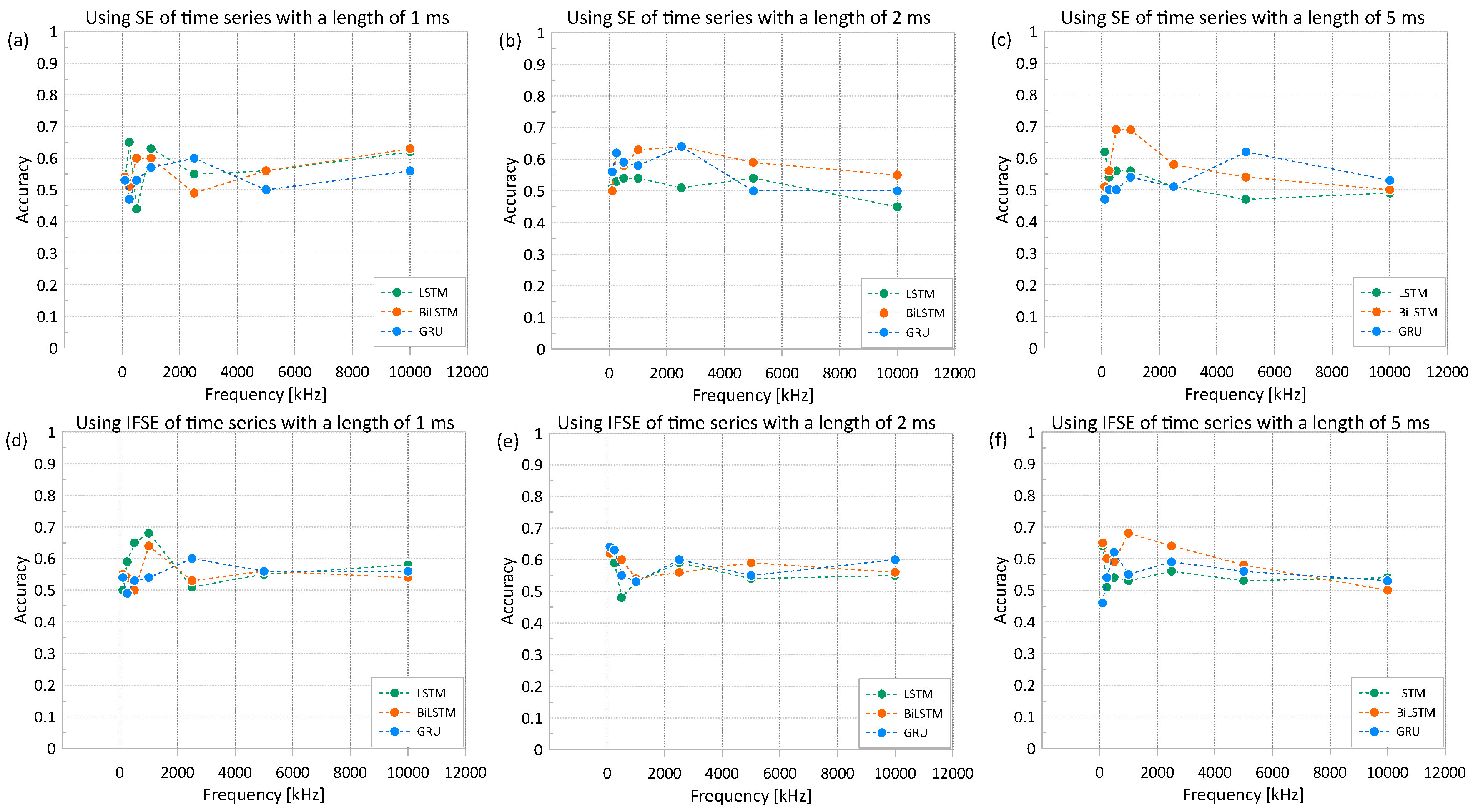
- The performance of deep learning classification models was affected by various parameters: length of time signal, sampling frequency of time signal, type of input, networks, and hyperparameters (batch size and epoch). The use of an extracted feature (i.e., IF and/or SE) as an input of RNN-based deep learning models resulted in better performance and far more improved computational efficiency than using time series. It was observed that time series with a length of 5 ms and a sampling frequency of 500 MHz was appropriate as an input of the feature extraction processes. However, it was difficult to reach general conclusions on the effects of various input and training parameters because different sets of parameters affected the performance results for the three RNN algorithms in a different way. A fine-tuning of hyperparameters further improved the performance of deep learning classification models.
- Deep learning classification models, in the form of RNNs, were effective for the evaluation of early concrete damage caused by steel corrosion in concrete with acceptable accuracy. The best performance was obtained using the bidirectional long short-term memory (BiLSTM) model based on a combination of instantaneous frequency and spectral entropy (IFSE) of ultrasonic pulse waves with a length of 5 ms and a sampling frequency of 250 kHz. Based on this method, the obtained accuracy and Cohen’s kappa were 74% and 0.48, respectively.
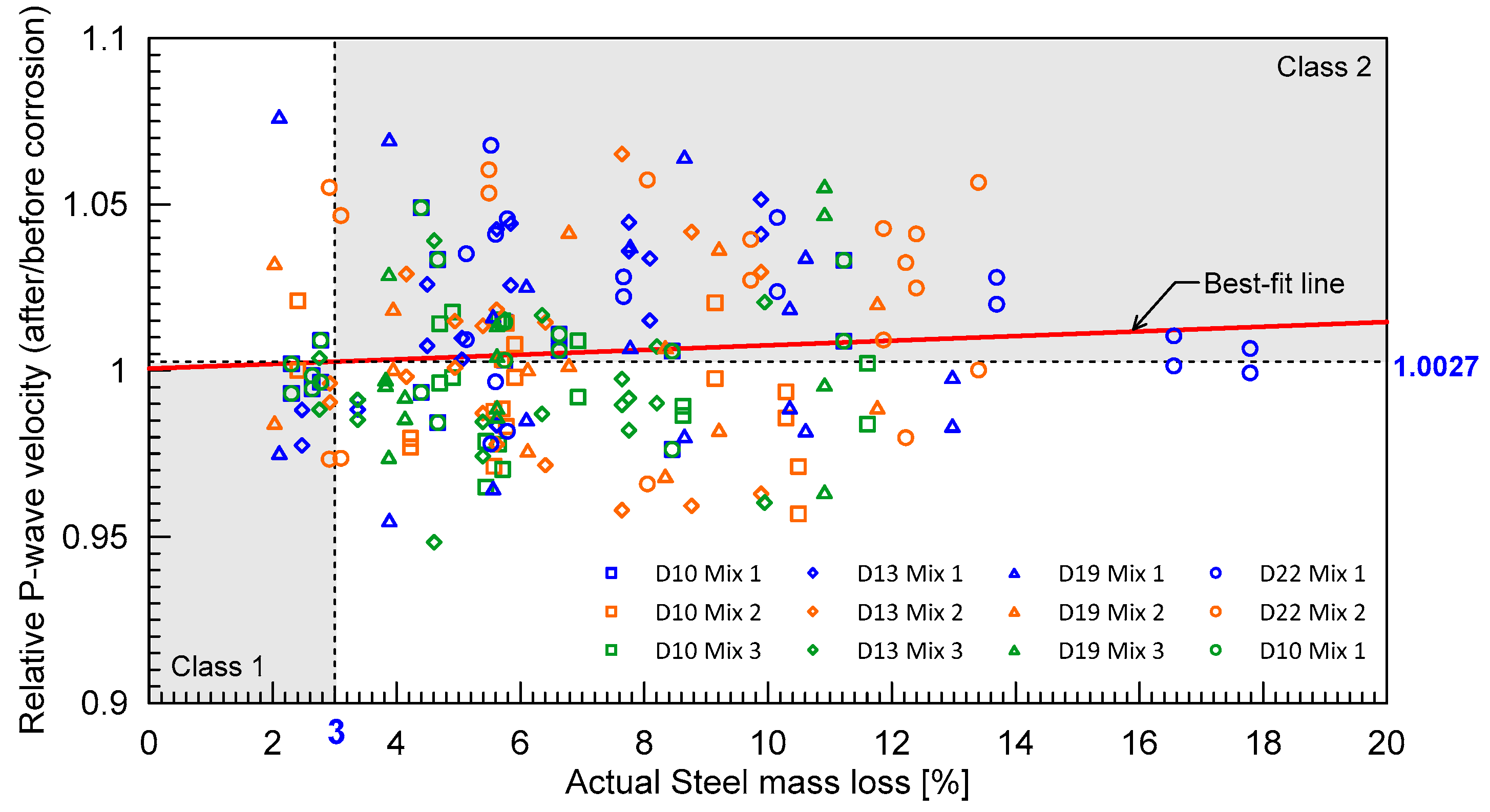
- It was demonstrated that the relative P-wave velocity was not practical for detecting early concrete damages associated with steel corrosion in the rust propagation phase. The classification model based on ultrasonic pulse velocity (UPV) resulted in a relatively low accuracy of 53% with a kappa of 0.07.
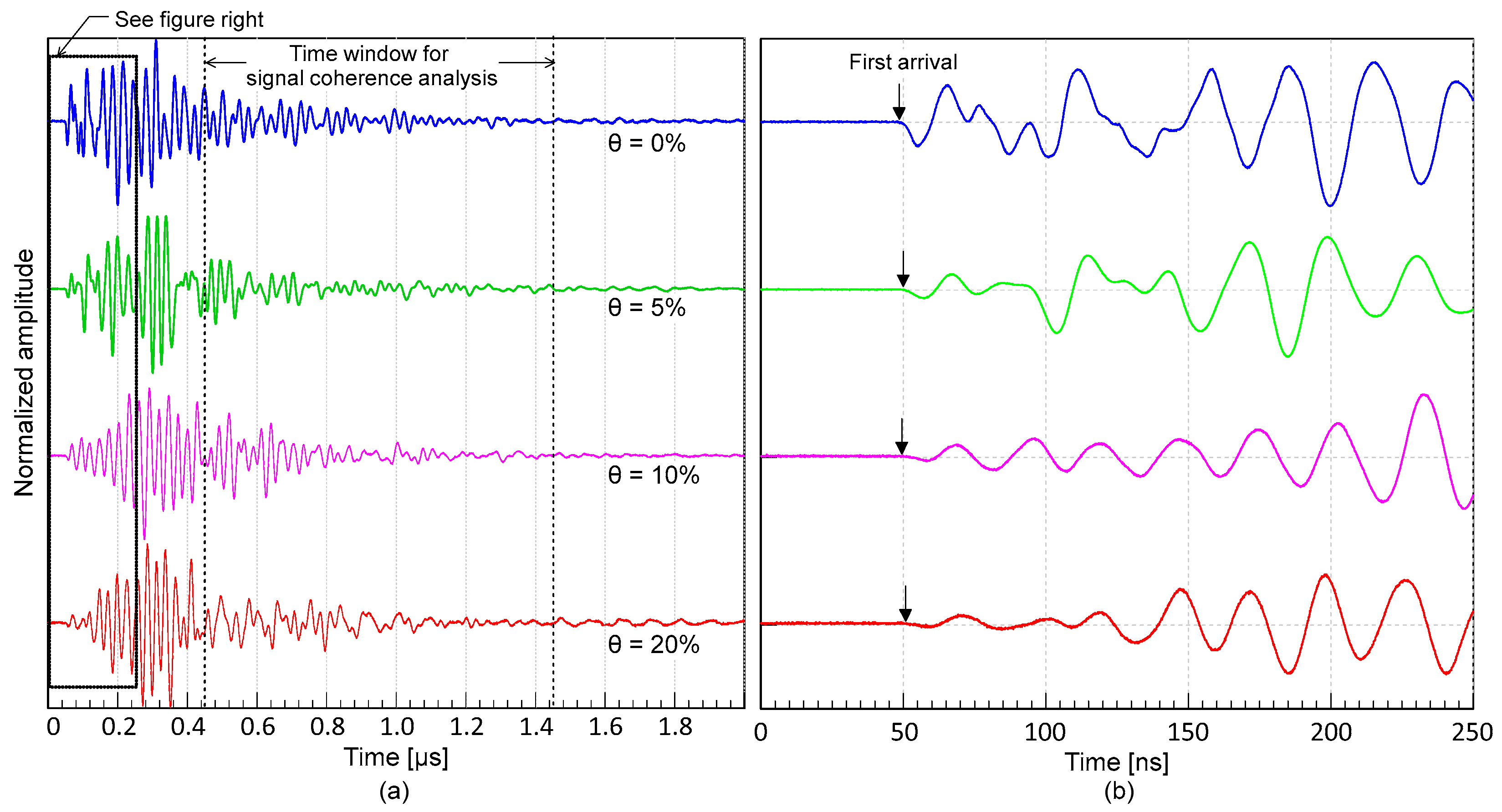
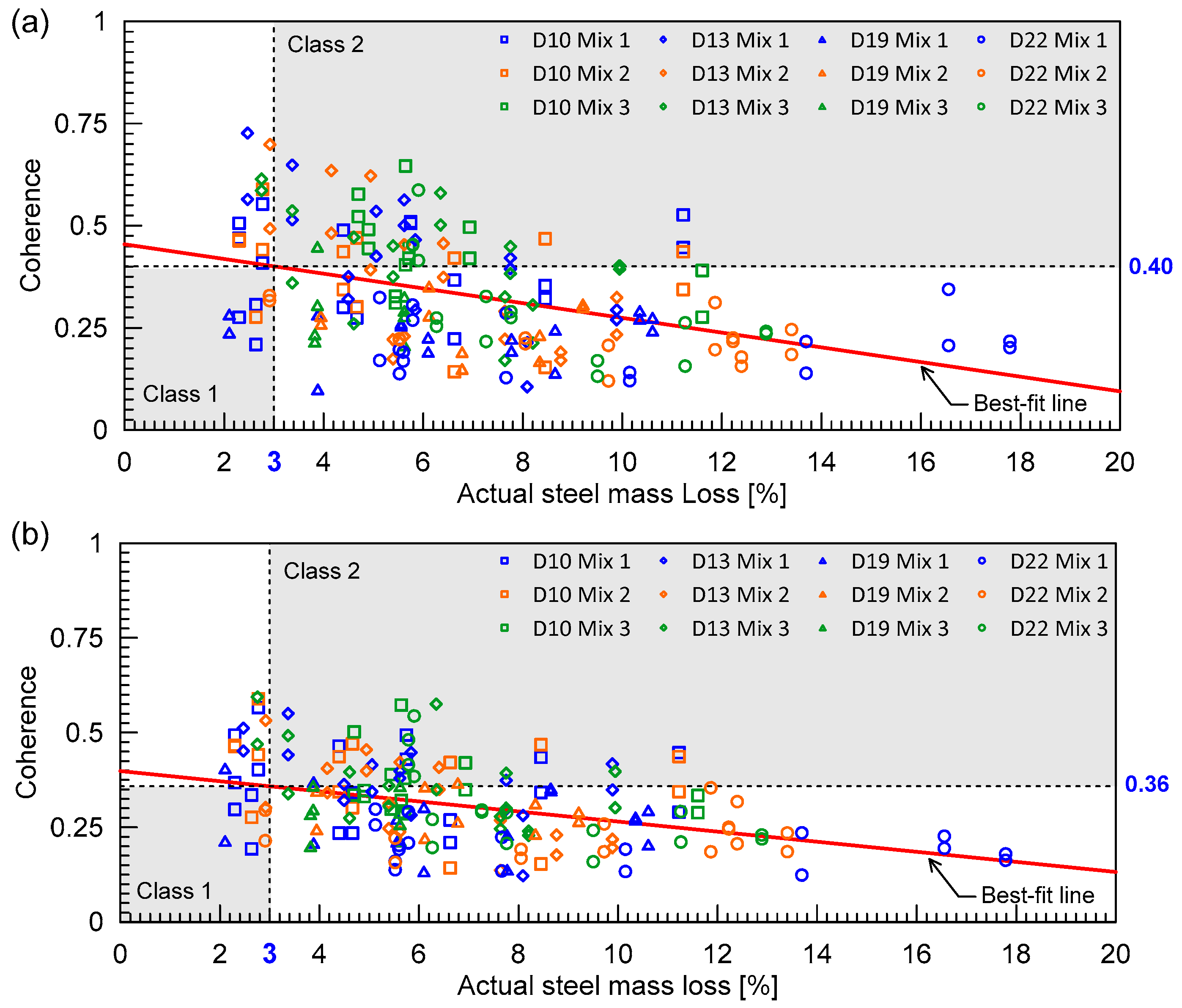
- The classification model based on signal coherence achieved more improved accuracy of 73% than that based on UPV. However, the method resulted in a relatively low kappa of 0.23, which is attributed to unbalanced true positives between classes. In addition, there are many parameters in this method, such as the analyzed signal time series and frequency window, that are not standardized and require engineering judgment. Therefore, special care is needed to optimize the model that results in the best performance of the model.
- The ultrasonic pulse wave data used in this study were collected from the limited number of concrete specimens fabricated in the laboratory, with corroded steel artificially accelerated by the impressed current technique, in specific saturation conditions (fully saturated conditions). Furthermore, signal measurements in this research were performed in the direct measurement configuration, which could limit this study’s practicality for actual structures. Therefore, more systematic studies that consider various experimental conditions in field applications are needed to reach more general conclusions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kashani, M.M.; Lowes, L.N.; Crewe, A.J.; Alexander, N.A. Finite Element Investigation of the Influence of Corrosion Pattern on Inelastic Buckling and Cyclic Response of Corroded Reinforcing Bars. Eng. Struct. 2014, 75, 113–125. [Google Scholar] [CrossRef]
- Kashani, M.M.; Crewe, A.J.; Alexander, N.A. Nonlinear Cyclic Response of Corrosion-Damaged Reinforcing Bars with the Effect of Buckling. Constr. Build. Mater. 2013, 41, 388–400. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, J.; Wang, L.; Liu, Y. Probabilistic Prediction with Bayesian Updating for Strength Degradation of RC Bridge Beams. Struct. Saf. 2013, 44, 102–109. [Google Scholar] [CrossRef]
- Alexander, M.; Beushausen, H. Durability, Service Life Prediction, and Modelling for Reinforced Concrete Structures—Review and Critique. Cem. Concr. Res. 2019, 122, 17–29. [Google Scholar] [CrossRef]
- Bezuidenhout, S.R.; van Zijl, G.P.A.G. Corrosion Propagation in Cracked Reinforced Concrete, toward Determining Residual Service Life. Struct. Concr. 2019, 20, 2183–2193. [Google Scholar] [CrossRef]
- Ramezanianpour, A.A.; Pilvar, A.; Mahdikhani, M.; Moodi, F. Practical Evaluation of Relationship between Concrete Resistivity, Water Penetration, Rapid Chloride Penetration and Compressive Strength. Constr. Build. Mater. 2011, 25, 2472–2479. [Google Scholar] [CrossRef]
- Ormellese, M.; Berra, M.; Bolzoni, F.; Pastore, T. Corrosion Inhibitors for Chlorides Induced Corrosion in Reinforced Concrete Structures. Cem. Concr. Res. 2006, 36, 536–547. [Google Scholar] [CrossRef]
- Tuutti, K. Corrosion of Steel in Concrete Report No. 4; Swedish Cement and Concrete Research Institute: Stockholm, Sweden, 1982; Available online: http://www.cbi.se/viewNavMenu.do?menuID=317&oid=857 (accessed on 15 February 2023).
- Aveldaño, R.R.; Ortega, N.F. Characterization of Concrete Cracking Due to Corrosion of Reinforcements in Different Environments. Constr. Build. Mater. 2011, 25, 630–637. [Google Scholar] [CrossRef]
- Angst, U.M. Challenges and Opportunities in Corrosion of Steel in Concrete. Mater. Struct. 2018, 51, 4. [Google Scholar] [CrossRef]
- Sohail, M.G.; Kahraman, R.; Alnuaimi, N.A.; Gencturk, B.; Alnahhal, W.; Dawood, M.; Belarbi, A. Electrochemical Behavior of Mild and Corrosion Resistant Concrete Reinforcing Steels. Constr. Build. Mater. 2020, 232, 117205. [Google Scholar] [CrossRef]
- Hou, B.; Li, X.; Ma, X.; Du, C.; Zhang, D.; Zheng, M.; Xu, W.; Lu, D.; Ma, F. The Cost of Corrosion in China. NPJ Mater. Degrad. 2017, 1, 4. [Google Scholar] [CrossRef]
- Goyal, A.; Pouya, H.S.; Ganjian, E.; Claisse, P. A Review of Corrosion and Protection of Steel in Concrete. Arab. J. Sci. Eng. 2018, 43, 5035–5055. [Google Scholar] [CrossRef]
- Kim, J.K.; Yee, J.J.; Kee, S.H. Electrochemical Deposition Treatment (Edt) as a Comprehensive Rehabilitation Method for Corrosion-Induced Deterioration in Concrete with Various Severity Levels. Sensors 2021, 21, 6287. [Google Scholar] [CrossRef]
- Li, Y.; Zhou, Y.; Wang, R.; Li, Y.; Wu, X.; Si, Z. Experimental Investigation on the Properties of the Interface between RCC Layers Subjected to Early-Age Frost Damage. Cem. Concr. Compos. 2022, 134, 104745. [Google Scholar] [CrossRef]
- American Standard of Testing and Materials International. ASTM C876-15; Standard Test Method for Standard Test Method for Corrosion Potentials of Uncoated Reinforcing Steel in Corrosion Potentials of Uncoated Reinforcing Steel in Concrete. ASTM: West Conshohocken, PA, USA, 2015. Available online: https://www.astm.org/c0876-15.html (accessed on 15 February 2023).
- Chen, L.; Su, R.K.L. Corrosion Rate Measurement by Using Polarization Resistance Method for Microcell and Macrocell Corrosion: Theoretical Analysis and Experimental Work with Simulated Concrete Pore Solution. Constr. Build. Mater. 2021, 267, 121003. [Google Scholar] [CrossRef]
- Feng, H.; Cui, L.; Zhang, M. Steel Corrosion Behavior Measurement Based on Electrochemical Approach. Int. J. Electrochem. Sci. 2016, 11, 4658–4666. [Google Scholar] [CrossRef]
- Ribeiro, D.V.; Abrantes, J.C.C. Application of Electrochemical Impedance Spectroscopy (EIS) to Monitor the Corrosion of Reinforced Concrete: A New Approach. Constr. Build. Mater. 2016, 111, 98–104. [Google Scholar] [CrossRef]
- Hornbostel, K.; Larsen, C.K.; Geiker, M.R. Relationship between Concrete Resistivity and Corrosion Rate—A Literature Review. Cem. Concr. Compos. 2013, 39, 60–72. [Google Scholar] [CrossRef]
- Lorenzi, A.; Caetano, L.F.; Chies, J.A.; Da Silva Filho, L.C.P. Investigation of the Potential for Evaluation of Concrete Flaws Using Nondestructive Testing Methods. Int. Sch. Res. Not. 2014, 2014, 543090. [Google Scholar] [CrossRef]
- Antonaci, P.; Bruno, C.L.E.; Bocca, P.G.; Scalerandi, M.; Gliozzi, A.S. Nonlinear Ultrasonic Evaluation of Load Effects on Discontinuities in Concrete. Cem. Concr. Res. 2010, 40, 340–346. [Google Scholar] [CrossRef]
- Pahlavan, L.; Zhang, F.; Blacquière, G.; Yang, Y.; Hordijk, D. Interaction of Ultrasonic Waves with Partially-Closed Cracks in Concrete Structures. Constr. Build. Mater. 2018, 167, 899–906. [Google Scholar] [CrossRef]
- Arumaikani, T.; Sasmal, S.; Kundu, T. Detection of Initiation of Corrosion Induced Damage in Concrete Structures Using Nonlinear Ultrasonic Techniques. J. Acoust. Soc. Am. 2022, 151, 1341–1352. [Google Scholar] [CrossRef] [PubMed]
- Basu, S.; Thirumalaiselvi, A.; Sasmal, S.; Kundu, T. Nonlinear Ultrasonics-Based Technique for Monitoring Damage Progression in Reinforced Concrete Structures. Ultrasonics 2021, 115, 106472. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Niederleithinger, E. Coda Wave Interferometry Used to Detect Loads and Cracks in a Concrete Structure under Field Conditions. In Proceedings of the 9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018; Volume 807, pp. 1–8. [Google Scholar]
- Ahn, E.; Shin, M.; Popovics, J.S.; Weaver, R.L. Effectiveness of Diffuse Ultrasound for Evaluation of Micro-Cracking Damage in Concrete. Cem. Concr. Res. 2019, 124, 105862. [Google Scholar] [CrossRef]
- Schurr, D.P.; Kim, J.Y.; Sabra, K.G.; Jacobs, L.J. Damage Detection in Concrete Using Coda Wave Interferometry. NDT E Int. 2011, 44, 728–735. [Google Scholar] [CrossRef]
- Castellano, A.; Fraddosio, A.; Piccioni, M.D.; Kundu, T. Linear and Nonlinear Ultrasonic Techniques for Monitoring Stress-Induced Damages in Concrete. J. Nondestruct. Eval. Diagn. Progn. Eng. Syst. 2021, 4, 041001. [Google Scholar] [CrossRef]
- Singh, S.; Pandey, S.K.; Pawar, U.; Janghel, R.R. Classification of ECG Arrhythmia Using Recurrent Neural Networks. Procedia Comput. Sci. 2018, 132, 1290–1297. [Google Scholar] [CrossRef]
- Kim, H.; Phan, T.Q.; Hong, W.; Chun, S.Y. Physiology-Based Augmented Deep Neural Network Frameworks For ECG Biometrics With Short ECG Pulses Considering Varying Heart Rates. Pattern Recognit. Lett. 2022, 156, 1–6. [Google Scholar] [CrossRef]
- Rejaibi, E.; Komaty, A.; Meriaudeau, F.; Agrebi, S.; Othmani, A. MFCC-Based Recurrent Neural Network for Automatic Clinical Depression Recognition and Assessment from Speech. Biomed. Signal Process. Control 2022, 71, 103107. [Google Scholar] [CrossRef]
- Hong, S.; Zheng, F.; Shi, G.; Li, J.; Luo, X.; Xing, F.; Tang, L.; Dong, B. Determination of Impressed Current Efficiency during Accelerated Corrosion of Reinforcement. Cem. Concr. Compos. 2020, 108, 103536. [Google Scholar] [CrossRef]
- Designation: G1-03; ASTM Standard Practice for Preparing, Cleaning, and Evaluating Corrosion Test Specimens. ASTM Special Technical Publication: West Conshohocken, PA, USA, 2017.
- ASTM C597-09; Standard Test Method for Pulse Velocity Through Concrete. ASTM: West Conshohocken, PA, USA, 2009; Volume 4.
- Petro, J.T.; Kim, J. Detection of Delamination in Concrete Using Ultrasonic Pulse Velocity Test. Constr. Build. Mater. 2012, 26, 574–582. [Google Scholar] [CrossRef]
- Arbaoui, A.; Aribi, C.; Boumaiza, M.; Mohamadi, S.; Ahmed, F.A. CNN-Based Concrete Cracks Detection Using Multiresolution Analysis. In Proceedings of the 2022 7th International Conference on Image and Signal Processing and their Applications (ISPA 2022), Mostaganem, Algeria, 8–9 May 2022. [Google Scholar] [CrossRef]
- MathWorks Magnitude-Squared Coherence—MATLAB Mscohere. Available online: https://www.mathworks.com/help/signal/ref/mscohere.html (accessed on 4 January 2022).
- Tsantekidis, A.; Passalis, N.; Tefas, A. Chapter 5—Recurrent Neural Networks; Iosifidis, A., Tefas, A., Eds.; Academic Press: Cambridge, MA, USA, 2022; pp. 101–115. ISBN 978-0-323-85787-1. [Google Scholar]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al-Dujaili, A.; Duan, Y.; Al-Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al-Amidie, M.; Farhan, L. Review of Deep Learning: Concepts, CNN Architectures, Challenges, Applications, Future Directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Barri, K.; Babanajad, S.K.; Alavi, A.H. Real-Time Detection of Cracks on Concrete Bridge Decks Using Deep Learning in the Frequency Domain. Engineering 2021, 7, 1786–1796. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long Short-Term Memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Li, F.; Liu, M.; Zhao, Y.; Kong, L.; Dong, L.; Liu, X.; Hui, M. Feature Extraction and Classification of Heart Sound Using 1D Convolutional Neural Networks. EURASIP J. Adv. Signal Process. 2019, 2019, 59. [Google Scholar] [CrossRef]
- Cho, K.; van Merrienboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning Phrase Representations Using RNN Encoder-Decoder for Statistical Machine Translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Choe, D.E.; Kim, H.C.; Kim, M.H. Sequence-Based Modeling of Deep Learning with LSTM and GRU Networks for Structural Damage Detection of Floating Offshore Wind Turbine Blades. Renew. Energy 2021, 174, 218–235. [Google Scholar] [CrossRef]
- Kłosowski, G.; Rymarczyk, T.; Wójcik, D.; Skowron, S.; Cieplak, T.; Adamkiewicz, P. The Use of Time-Frequency Moments as Inputs of Lstm Network for Ecg Signal Classification. Electronics 2020, 9, 1452. [Google Scholar] [CrossRef]
- Gaona, A.J.; Arini, P.D. Deep Recurrent Learning for Heart Sounds Segmentation Based on Instantaneous Frequency Features. Elektron 2020, 4, 52–57. [Google Scholar] [CrossRef]
- Boashash, B. Estimating and Interpreting The Instantaneous Frequency of a Signal—Part 1: Fundamentals. Proc. IEEE 1992, 80, 520–538. [Google Scholar] [CrossRef]
- Suto, J.; Oniga, S.; Lung, C.; Orha, I. Comparison of Offline and Real-Time Human Activity Recognition Results Using Machine Learning Techniques. Neural Comput. Appl. 2020, 32, 15673–15686. [Google Scholar] [CrossRef]
- Nguyen, H.; Hoang, N. Automation in Construction Computer Vision-Based Classification of Concrete Spall Severity Using Metaheuristic-Optimized Extreme Gradient Boosting Machine and Deep Convolutional Neural Network. Autom. Constr. 2022, 140, 104371. [Google Scholar] [CrossRef]
- Khadse, V.; Mahalle, P.N.; Biraris, S.V. An Empirical Comparison of Supervised Machine Learning Algorithms for Internet of Things Data. In Proceedings of the 2018 Fourth International Conference on Computing Communication Control and Automation (ICCUBEA), Pune, India, 16–18 August 2018; pp. 2–7. [Google Scholar] [CrossRef]
- Thawkar, S. A Hybrid Model Using Teaching–Learning-Based Optimization and Salp Swarm Algorithm for Feature Selection and Classification in Digital Mammography. J. Ambient Intell. Humaniz. Comput. 2021, 12, 8793–8808. [Google Scholar] [CrossRef]
- Ho, G.Y.; Leonhard, M.; Volk, G.F.; Foerster, G.; Pototschnig, C.; Klinge, K.; Granitzka, T.; Zienau, A.K.; Schneider-Stickler, B. Inter-Rater Reliability of Seven Neurolaryngologists in Laryngeal EMG Signal Interpretation. Eur. Arch. Oto-Rhino-Laryngol. 2019, 276, 2849–2856. [Google Scholar] [CrossRef] [PubMed]
- Nossier, S.A.; Wall, J.; Moniri, M.; Glackin, C.; Cannings, N. A Comparative Study of Time and Frequency Domain Approaches to Deep Learning Based Speech Enhancement. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020. [Google Scholar] [CrossRef]
- Kee, S.H.; Zhu, J. Using Piezoelectric Sensors for Ultrasonic Pulse Velocity Measurements in Concrete. Smart Mater. Struct. 2013, 22, 115016. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mix Design | w/c (%) | Mixture Proportion (kg/m3) | ||||
|---|---|---|---|---|---|---|
| W | C | S | G | AE | ||
| Mix 1 | 58.5 | 168 | 287 | 957 | 898 | 2.58 |
| Mix 2 | 50.7 | 170 | 335 | 870 | 956 | 2.50 |
| Mix 3 | 34.6 | 166 | 480 | 720 | 993 | 4.32 |
| Model | Gate Type | Equation |
|---|---|---|
| LSTM | Forget gate | |
| Input gate | ||
| Output gate | ||
| Hidden gate | ||
| Final Output | ||
| GRU | Update gate | |
| Reset gate | ||
| Hidden state | ||
| Final output |
| Class | Steel Corrosion Loss | Vr,p | MSC1 | MSC2 |
|---|---|---|---|---|
| Class 1 (N) | <3% | Vr,p < 1.0027 | MSC > 0.40 | MSC > 0.36 |
| Class 2 (P) | ≥3% | Vr,p ≥ 1.0027 | MSC ≤ 0.40 | MSC ≤ 0.36 |
| Predicted | |||||||
|---|---|---|---|---|---|---|---|
| Vr,p | MSC1 | MSC2 | |||||
| P | N | P | N | P | N | ||
| Actual | P | 95 (45.2%) | 91 (43.4%) | 119 (62.9%) | 45 (23.8%) | 123 (65.1%) | 41 (21.7%) |
| N | 8 (3.8%) | 16 (7.6%) | 10 (5.3%) | 15 (7.9%) | 10 (5.3%) | 15 (7.9%) | |
| Accuracy | 52.8% | 71.0% | 73.0% | ||||
| Cohen’s kappa | 7% | 20.0% | 22.9% | ||||
| Parameter | Range | |
|---|---|---|
| Length of time signal | 1 ms, 2 ms, and 5 ms | |
| Sampling frequency of time signal | 100 kHz, 250 kHz, 500 kHz, and 1000 kHz | |
| Type of input | Time series (TS), instantaneous frequency (IF), spectral entropy (SE), and combination of IF and SE (IFSE) | |
| Network | LSTM, BiLSTM, and GRU | |
| Hyperparameter | Batch size | 1, 2, 4, 8, and 16 |
| Epoch | 100, 200, 300, 400, and 500 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mukhti, J.A.; Robles, K.P.V.; Lee, K.-H.; Kee, S.-H. Evaluation of Early Concrete Damage Caused by Chloride-Induced Steel Corrosion Using a Deep Learning Approach Based on RNN for Ultrasonic Pulse Waves. Materials 2023, 16, 3502. https://doi.org/10.3390/ma16093502
Mukhti JA, Robles KPV, Lee K-H, Kee S-H. Evaluation of Early Concrete Damage Caused by Chloride-Induced Steel Corrosion Using a Deep Learning Approach Based on RNN for Ultrasonic Pulse Waves. Materials. 2023; 16(9):3502. https://doi.org/10.3390/ma16093502
Chicago/Turabian StyleMukhti, Julfikhsan Ahmad, Kevin Paolo V. Robles, Keon-Ho Lee, and Seong-Hoon Kee. 2023. "Evaluation of Early Concrete Damage Caused by Chloride-Induced Steel Corrosion Using a Deep Learning Approach Based on RNN for Ultrasonic Pulse Waves" Materials 16, no. 9: 3502. https://doi.org/10.3390/ma16093502