
Modeling and Vibration Control of Sandwich Composite Plates

Abstract
:1. Introduction
2. Finite Element Method Modeling
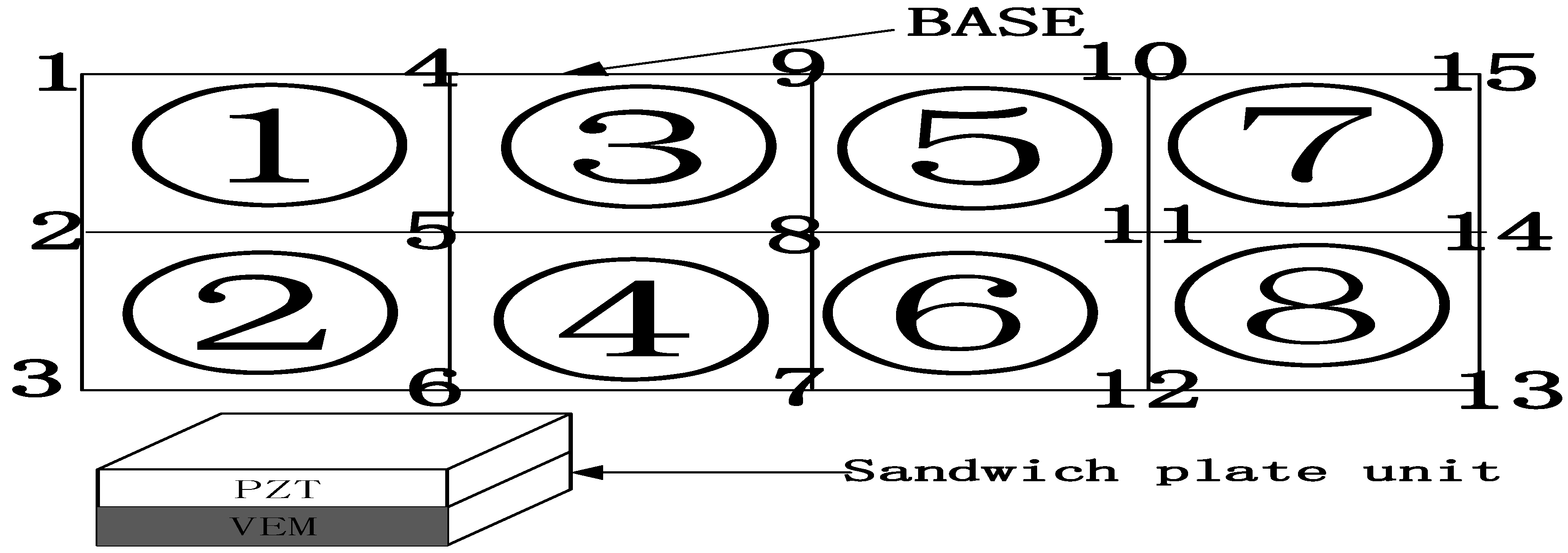
2.1. Unit Deformation and Motion Relationship
2.2. Unit Displacement Patterns and Form Functions
2.3. Finite Element Dynamics Equations
3. Model Downgrading
3.1. Dynamical Condensation in Physical Space
3.2. Equilibrium Descending Order in State Space
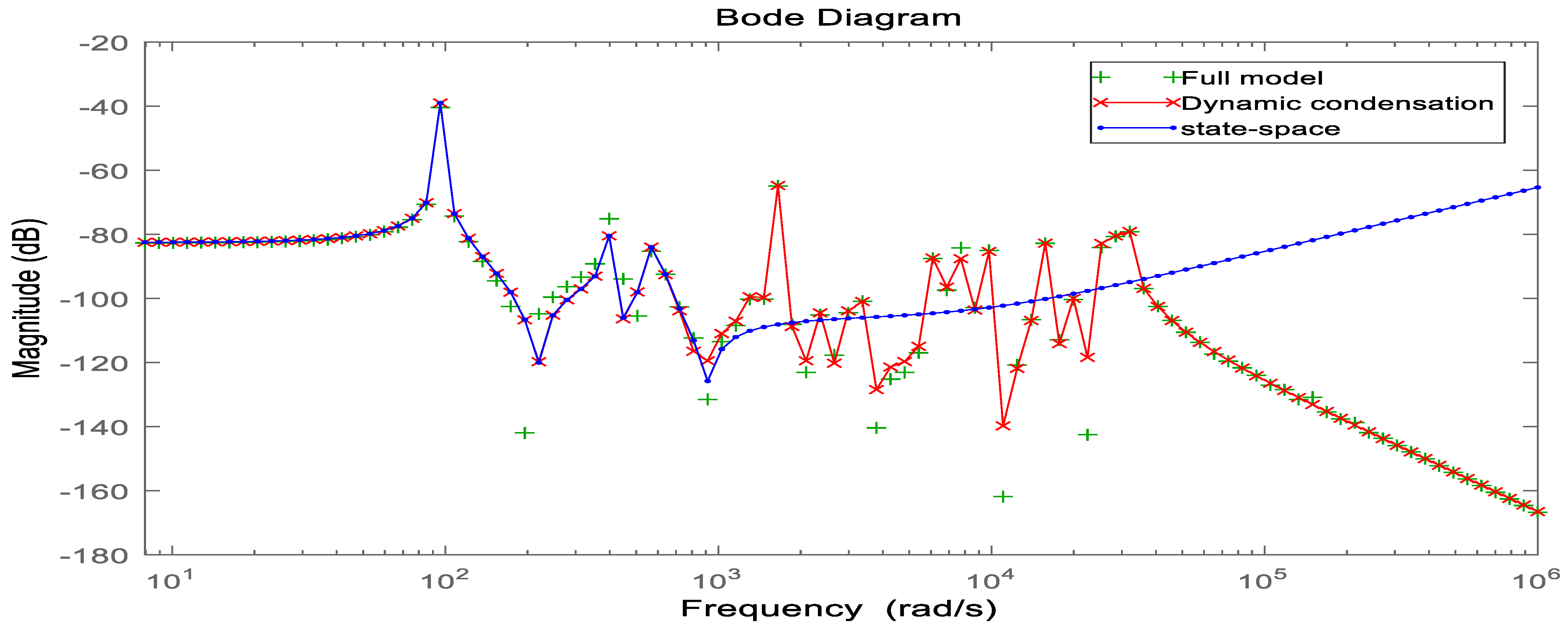
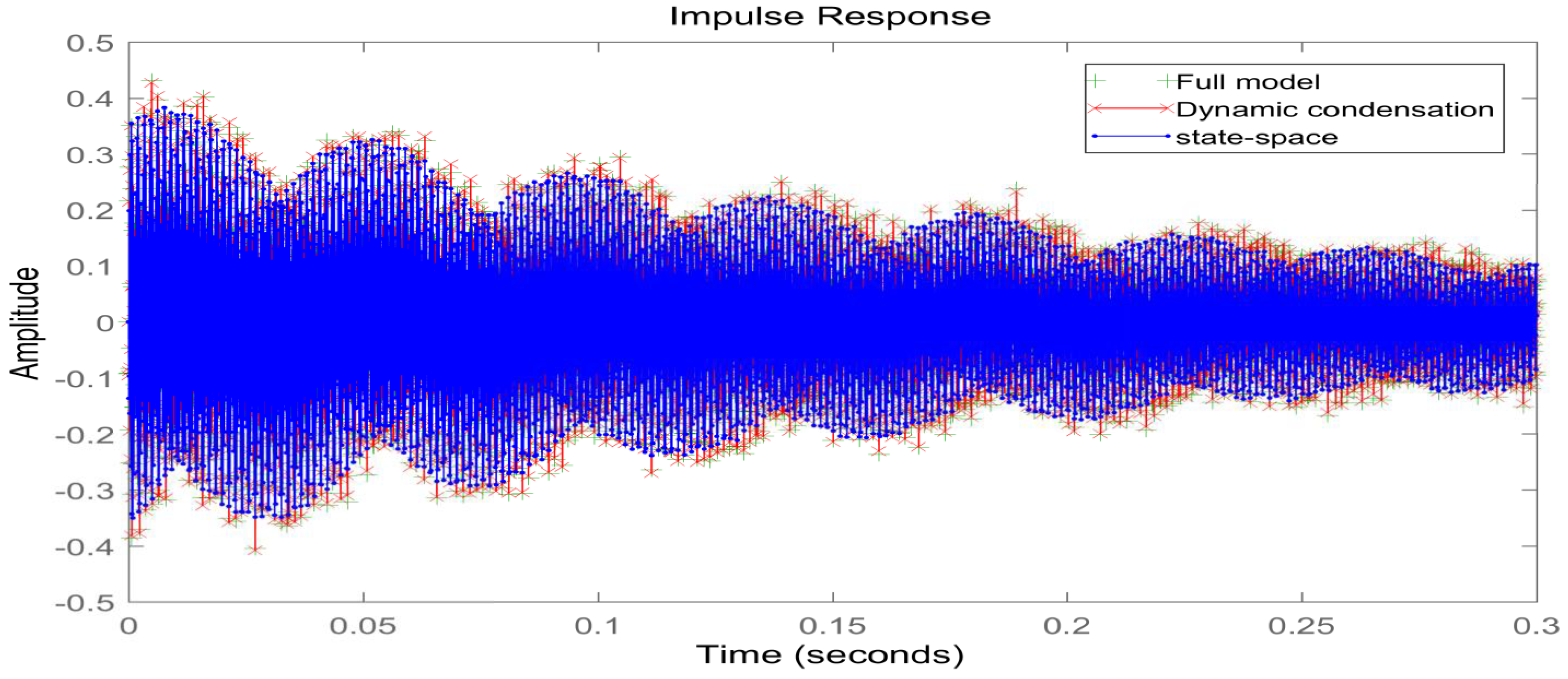
4. Model Validation and Case Analysis
5. LQR Control and Simulation Analysis
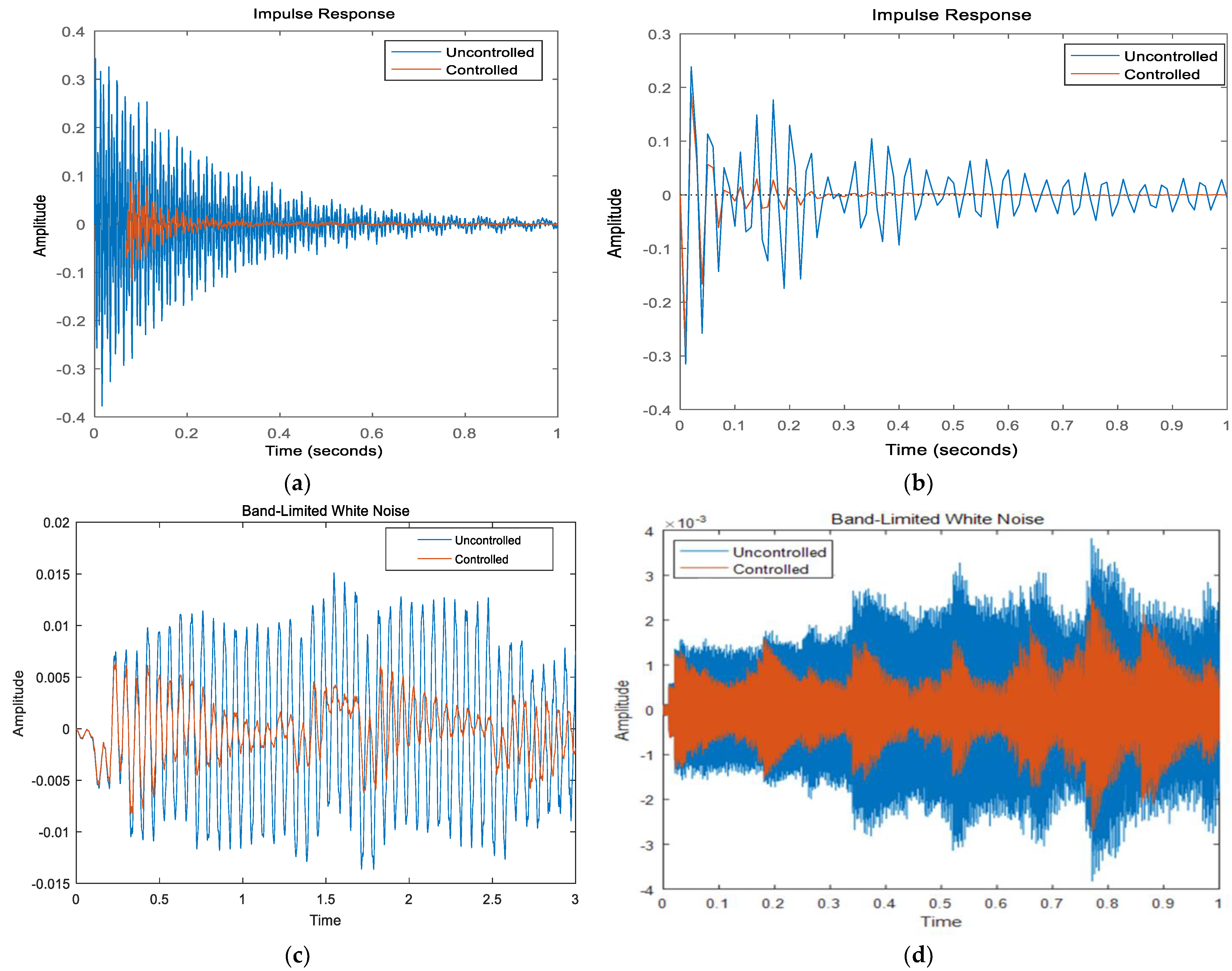
5.1. Simulation of Vibration Control of Sandwich Composite Plates
5.2. Controller Parameter Optimization
5.3. Sandwich Composite Plates Cover Position Optimization
5.4. Optimization of Viscoelastic Material Layer Parameters
6. Conclusions
- (1)
- The finite element model established in this paper is still valid under different boundary conditions and different covering methods. The introduction of the complex constant shear modulus damping model and the proportional damping of the base layer further improves the accuracy of the structural dynamics model. The mathematical model obtained by the joint reduced order method has low degrees of freedom, good controllability, and observability. The dynamical characteristics of the reduced-order model are essentially unchanged in both the time and frequency domains. It can be directly used for system controller design.
- (2)
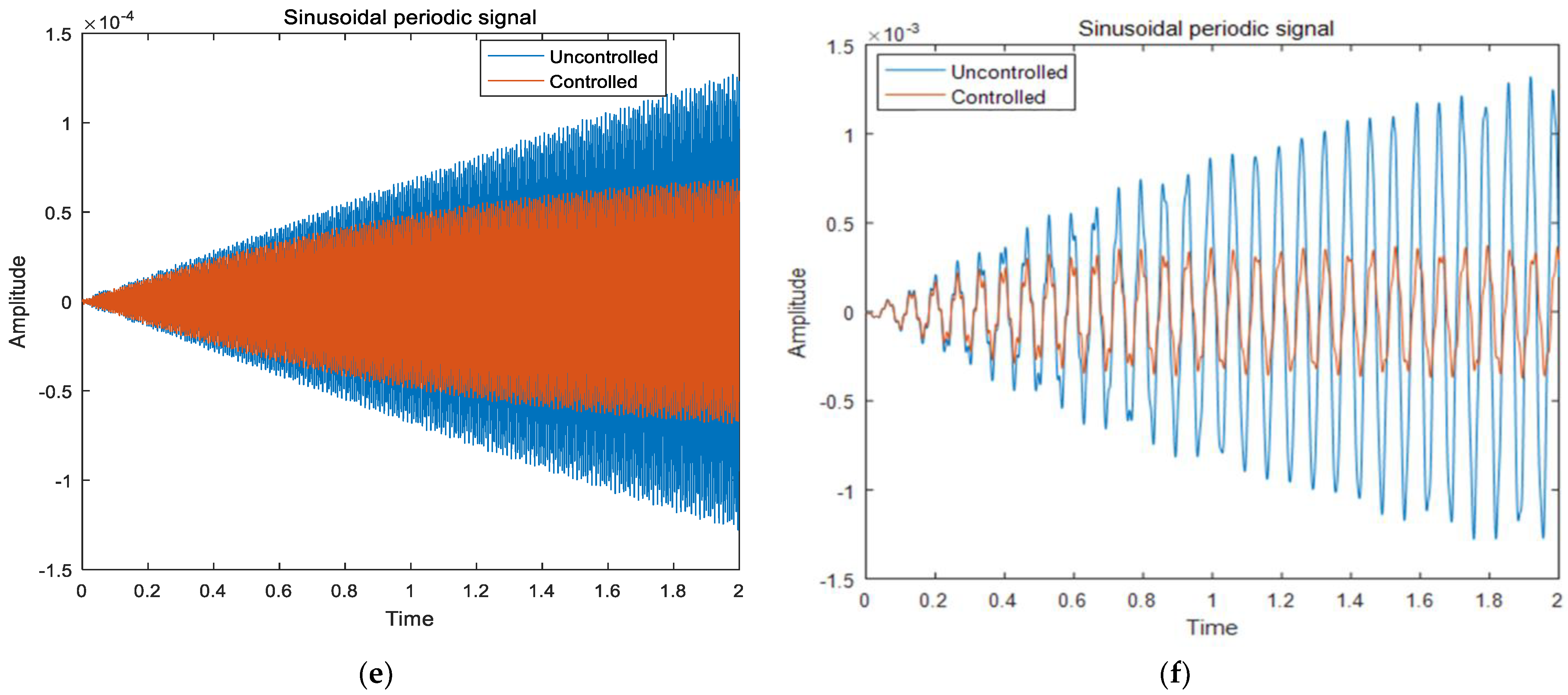
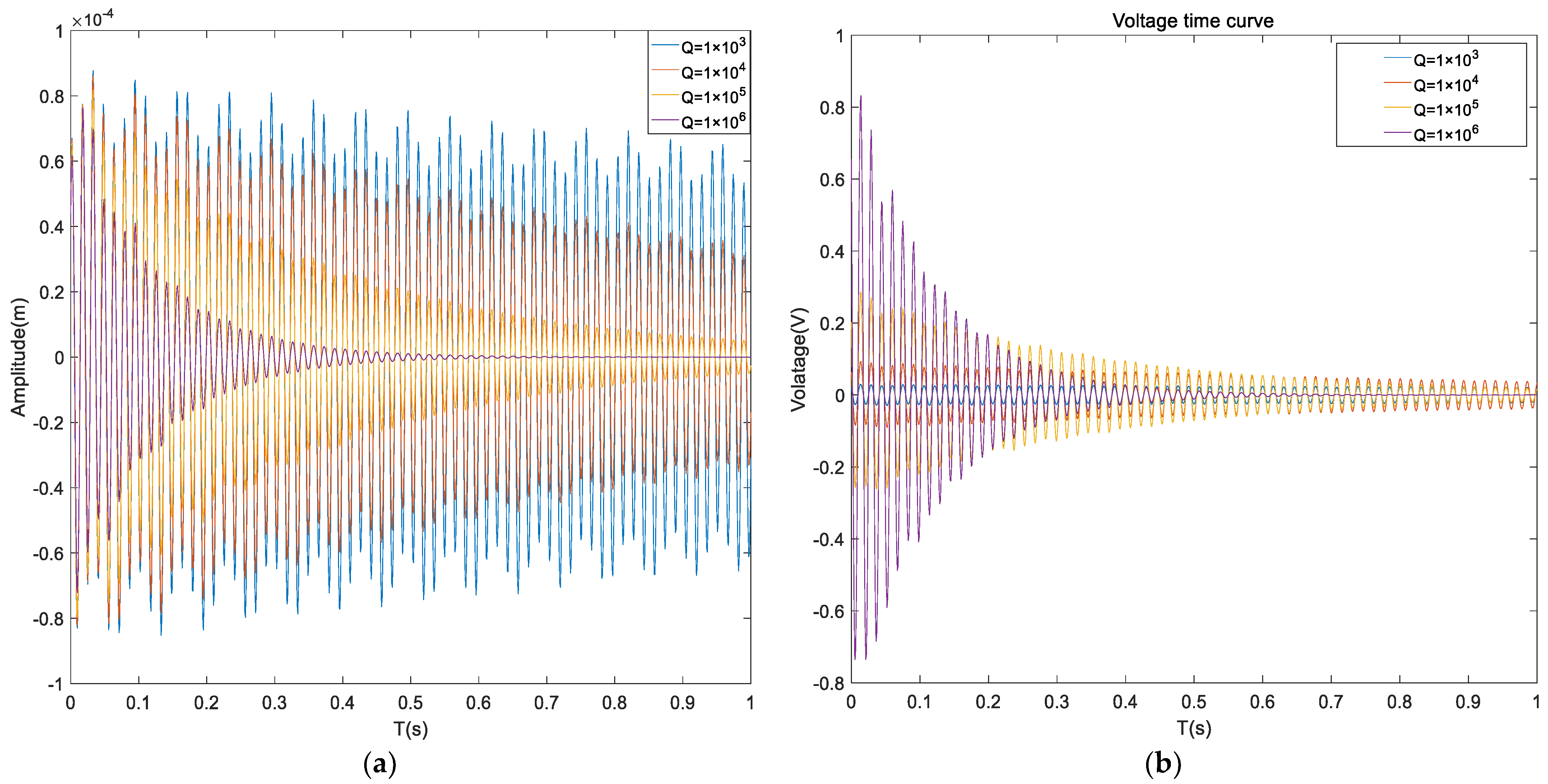
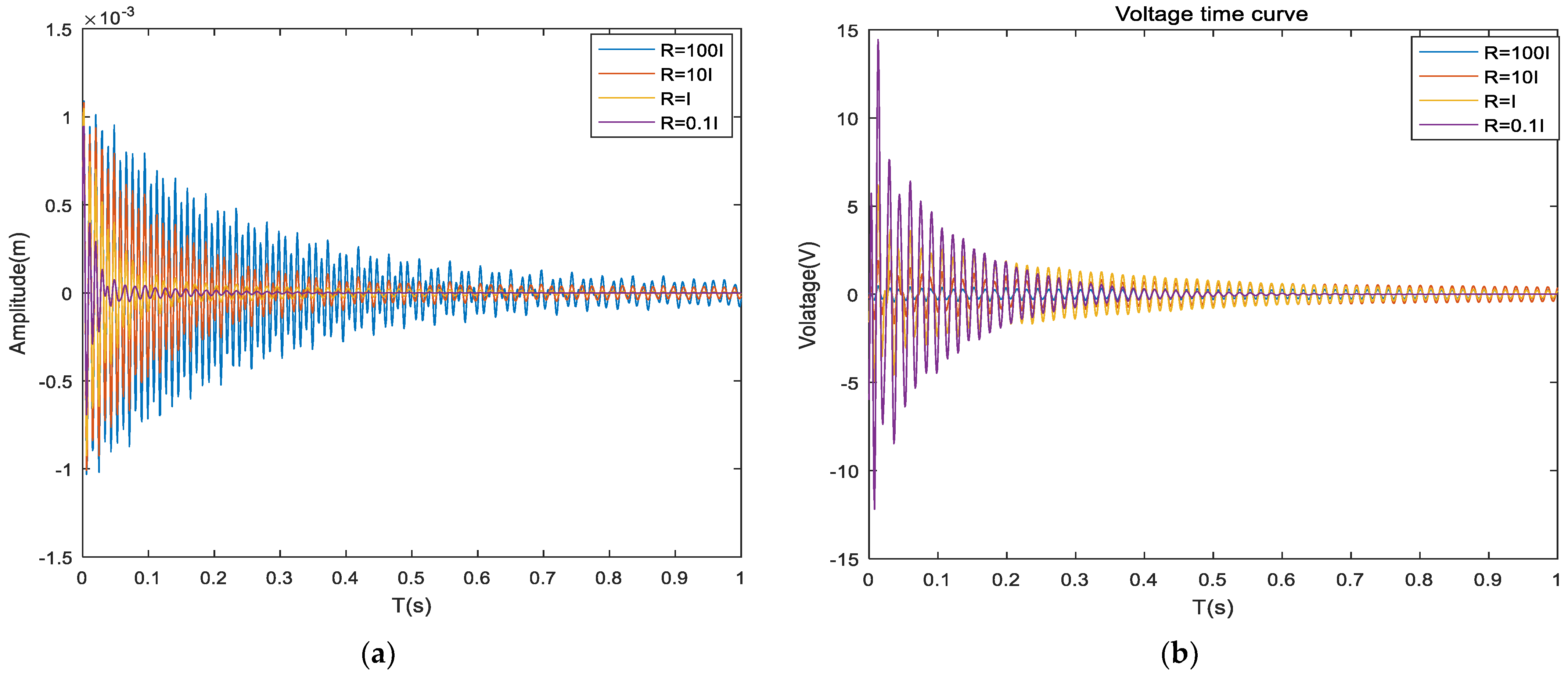
- Through simulation, it can be seen that the sandwich composite plates can effectively suppress the structural vibration with good adaptability under different boundary conditions and different excitation signals using the LQR controller. And the Q and R weighting matrix coefficients affect the system control effect, which provides a theoretical basis for further determining the optimal form and size of the Q and R matrices to obtain the global optimal control effect and has practical application value.
- (3)
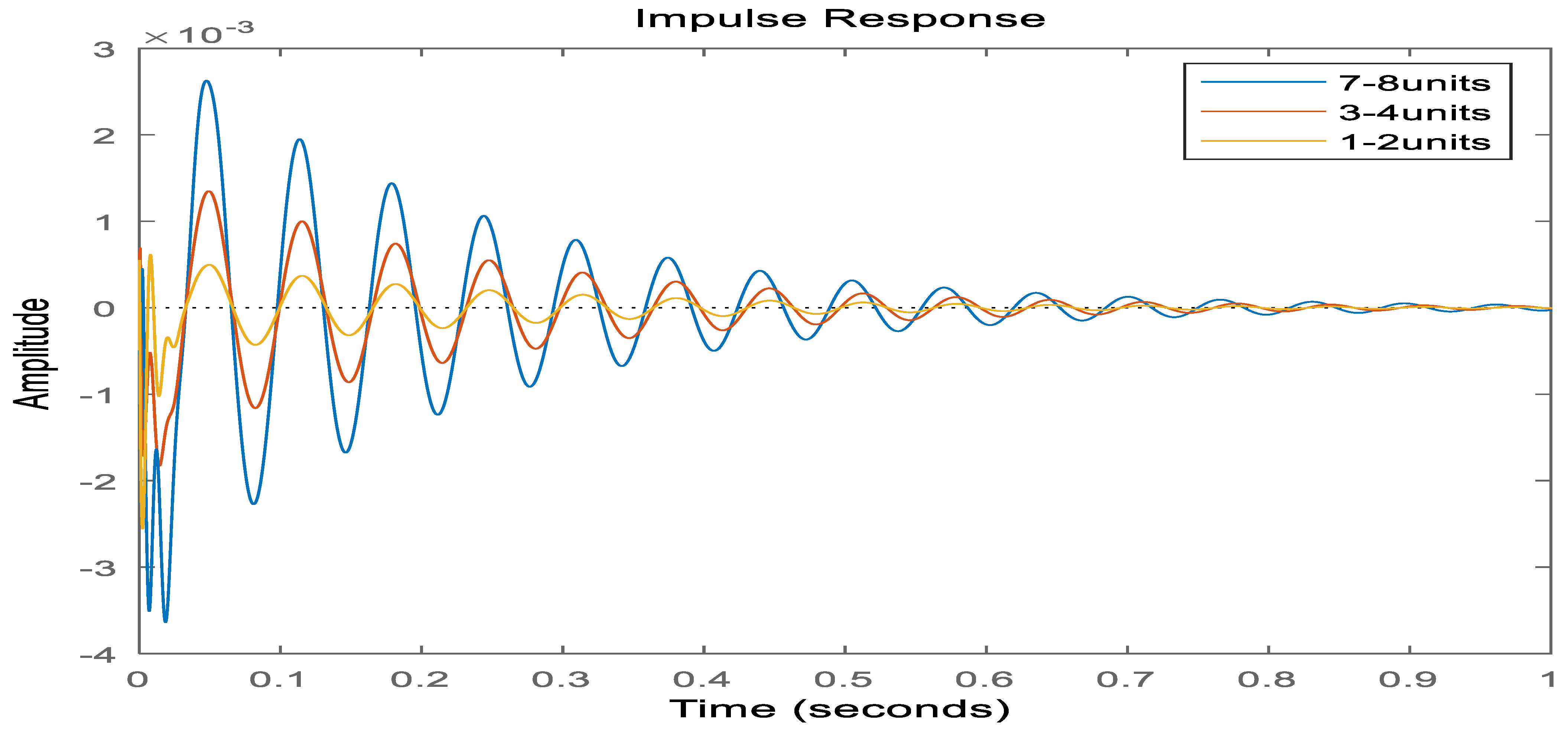
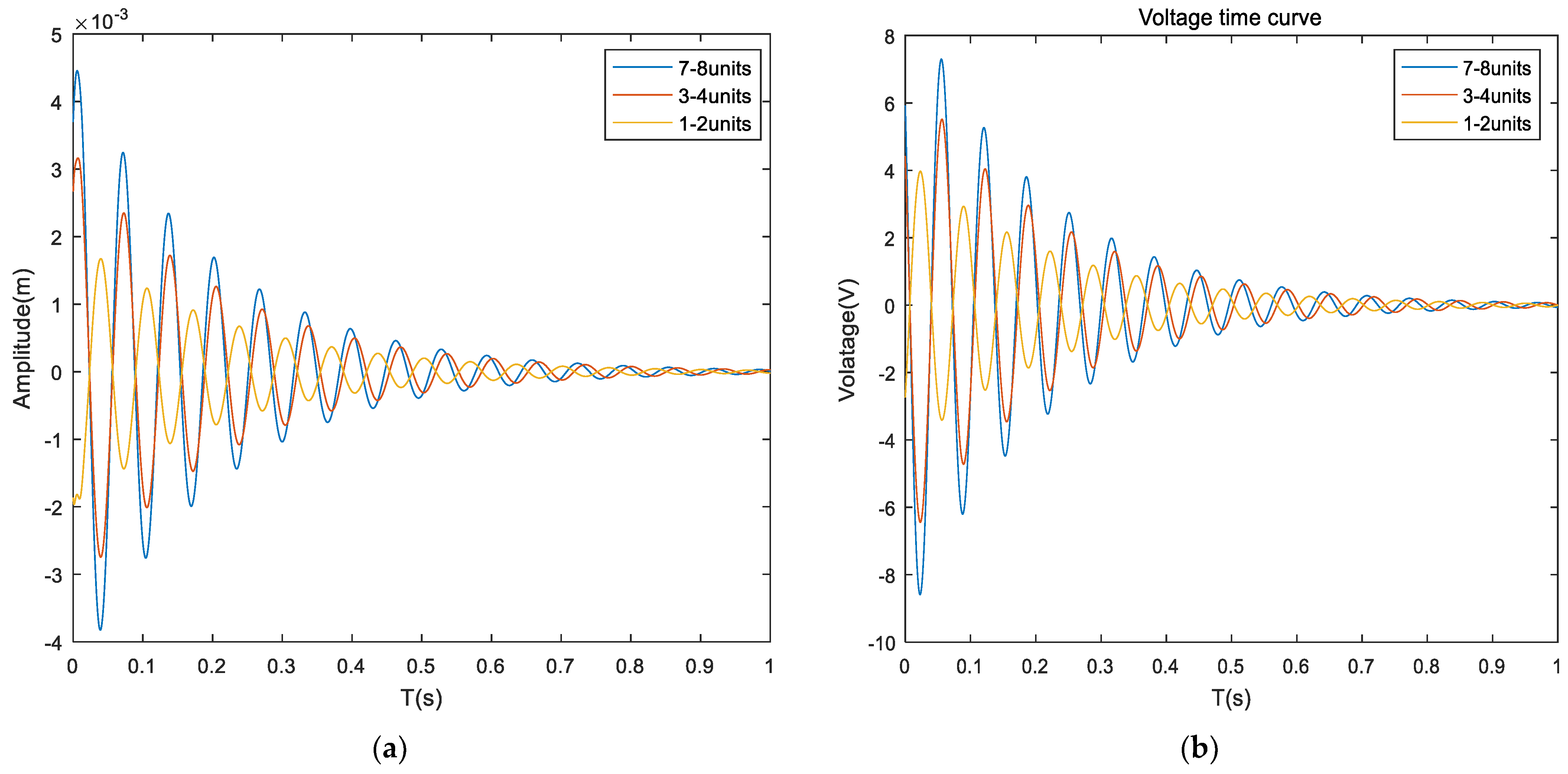
- Through the analysis of calculation and simulation, it can be seen that changing the unit coverage position can play a good role in suppressing the system vibration, especially in reducing the maximum amplitude of the system, but the convergence effect is not obvious. When the boundary condition is CFCF of the composite sandwich panel, the best coverage of the sandwich panel is near the solid support end (1, 2) unit. When the boundary condition is CFFF, the best coverage of the sandwich panel is near the solid support end (1, 2, 7, 8) units.
- (4)
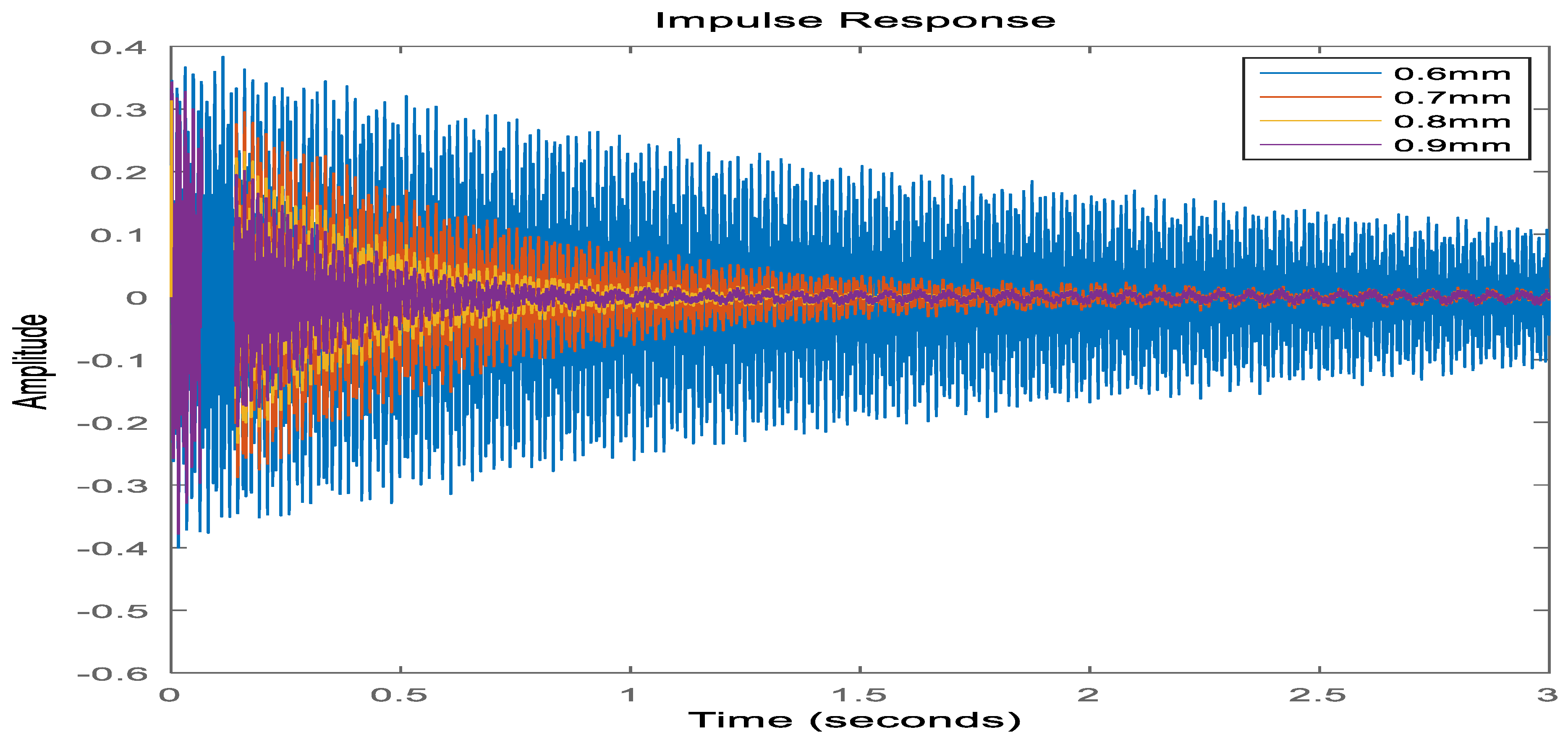
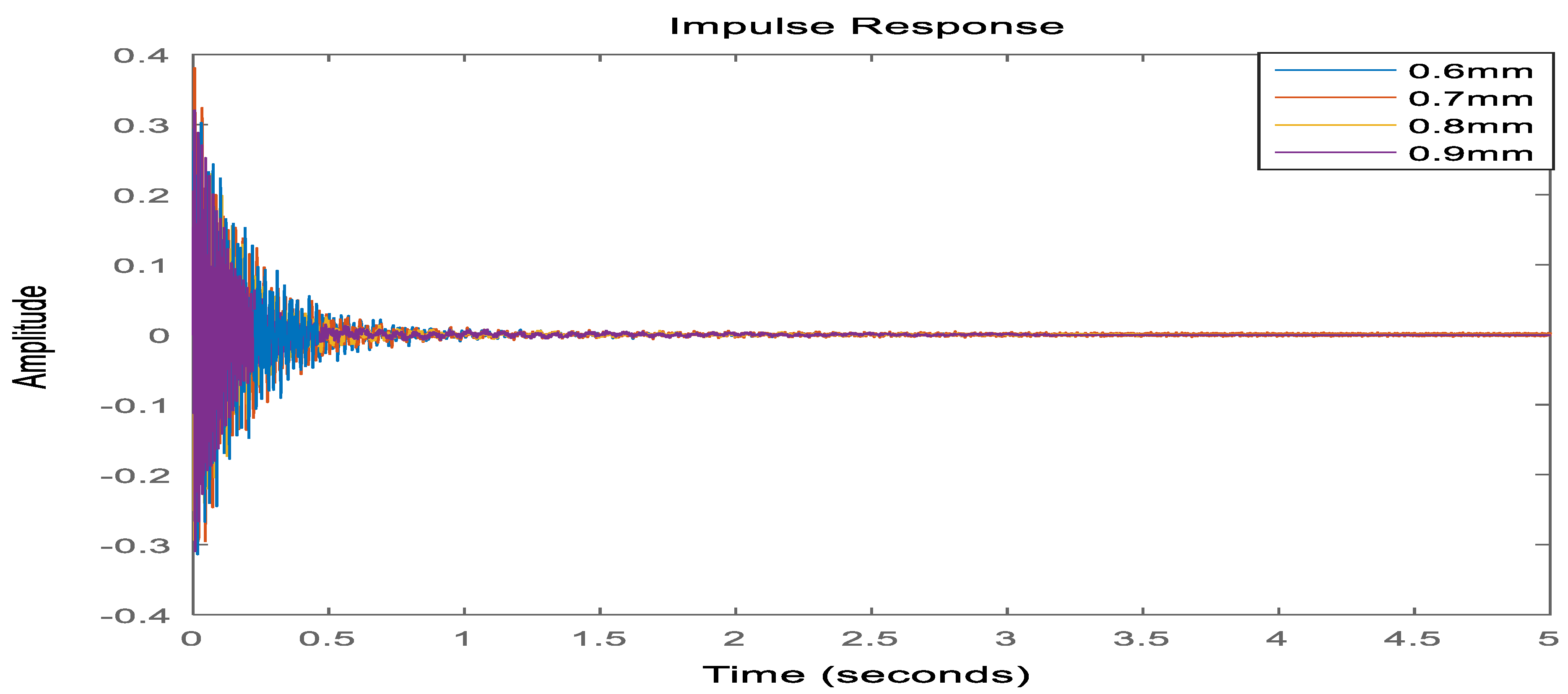
- The thickness of the damping layer affects the stability of the system after the failure of active control, and an appropriate increase in the thickness of the damping layer can enhance the passive control effect of the sandwich composite plates. The advantages of this method are a good suppression effect in the high-frequency vibration region and low control cost. The disadvantage is that the control effect is limited, the effect on the low-frequency region of the system vibration is not obvious, and the one-sided increase in thickness will lead to the overall mass of the system being too large. Therefore, the choice needs to be made according to the designer’s needs and the specific use scenario.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Z.; Qin, Z.; Chu, F. A compression shear mixed finite element model for vibration and damping analysis of viscoelastic sandwich structures. J. Sandw. Struct. Mater. 2019, 21, 1775–1798. [Google Scholar] [CrossRef]
- Huang, Z.; Wang, X.; Wu, N.; Chu, F.; Luo, J. TheFinite Element Modeling and Experimental Study of Sandwich Plates with Frequency-Dependent Viscoelastic Material Model. Materials 2020, 13, 2296. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A.; Behera, R.K. Passive Constrained Layer Damping: A State of the Art Review. IOP Conf. Ser. Mater. Sci. Eng. 2019, 653, 012036. [Google Scholar] [CrossRef] [Green Version]
- Zhu, R.; Zhang, X.; Zhang, S.; Dai, Q.; Qin, Z.; Chu, F. Modeling and topology optimization of cylindrical shells with partial CLD treatment. Int. J. Mech. Sci. 2022, 220, 107145. [Google Scholar] [CrossRef]
- El Hafidi, A.; Herrero, C.D.L.P.; Martin, B. Optimization of passive constrained layer damping (PCLD) treatments for vibration reduction. J. Vibroeng. 2015, 17, 3035–3045. [Google Scholar]
- Zhang, L.; Zhang, F.; Qin, Z.; Han, Q.; Wang, T.; Chu, F. Piezoelectric energy harvester for rolling bearings with capability of self-powered condition monitoring. Energy 2022, 238, 121770. [Google Scholar] [CrossRef]
- Kwak, S.-K.; Washington, G.; Yedavalli, R.K. Acceleration Feedback-Based Active and Passive Vibration Control of Landing Gear Components. J. Aerosp. Eng. 2002, 15, 1–9. [Google Scholar] [CrossRef]
- Baz, A. Boundary Control of Beams Using Active Constrained Layer Damping. J. Vib. Acoust. 1997, 119, 166–172. [Google Scholar] [CrossRef]
- Lam, M.J.; Inman, D.J.; Saunders, W.R. Vibration Control through Passive Constrained Layer Damping and Active Control. J. Intell. Mater. Syst. Struct. 1997, 8, 663–677. [Google Scholar] [CrossRef]
- Liu, T.; Hua, H.; Zhang, Z. Robust control of plate vibration via active constrained layer damping. Thin-Walled Struct. 2004, 42, 427–448. [Google Scholar] [CrossRef]
- Ray, M.C.; Oh, J.; Baz, A. Active constrained layer damping of thin cylindrical shells. J. Sound Vib. 2001, 240, 921–935. [Google Scholar] [CrossRef]
- Kattimani, S.C.; Ray, M.C. Vibration control of multiferroic fibrous composite plates using active constrained layer damping. Mech. Syst. Signal Process. 2018, 106, 334–354. [Google Scholar] [CrossRef]
- Baz, A. Dynamic Boundary Control of Beams Using Active Constrained Layer Damping. Mech. Syst. Signal Process. 1997, 11, 811–825. [Google Scholar] [CrossRef]
- Liao, W.; Wang, K. Analysis and design of viscoelastic materials for active constrained layer damping treatments. Proc. SPIE 1996, 2720, 213–223. [Google Scholar] [CrossRef]
- Shen, I.Y. Bending-vibration control of composite and isotropic plates through intelligent constrained-layer treatments. Smart Mater. Struct. 1994, 3, 59–70. [Google Scholar] [CrossRef]
- Huang, Z.; Qin, Z.; Chu, F. Vibration and damping characteristics of sandwich plates with viscoelastic core. J. Vib. Control. 2016, 22, 1876–1888. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, G.; Wei, D.; Tian, Y.; Yang, L. The research on the transverse vibration active control model of ship propulsion shaft with the active control force on the bearing support. Ocean Eng. 2022, 266, 112722. [Google Scholar] [CrossRef]
- Huang, Z.; Mao, Y.; Dai, A.; Han, M.; Wang, X.; Chu, F. Active Vibration Control of Piezoelectric Sandwich Plates. Materials 2022, 15, 3907. [Google Scholar] [CrossRef]
- Cao, X.; Tanner, G.; Chronopoulos, D. Active vibration control of thin constrained composite damping plates with double piezoelectric layers. Wave Motion 2020, 92, 102423. [Google Scholar] [CrossRef]
- Li, M.; Sun, W.; Liu, Y.; Ma, H. Influence analysis of control signal phase on the vibration reduction effect of active constrained layer damping. Appl. Acoust. 2022, 190, 108658. [Google Scholar] [CrossRef]
- Lu, P.; Wang, P.; Lu, J. Decentralized vibration control of smart constrained layer damping plate. J. Vib. Control. 2021, 27, 529–542. [Google Scholar] [CrossRef]
- Cao, Y.Q.; Deng, Z.X.; Wang, P. A Mechanics Model and Active Control for Smart Constrained Layer Damping Structure. Appl. Mech. Mater. 2012, 184–185, 767–773. [Google Scholar] [CrossRef]
- Zhang, D.; Zheng, L. Active Vibration Control of Plate Partly Treated with ACLD Using Hybrid Control. Int. J. Aerosp. Eng. 2014, 2014, 432970. [Google Scholar] [CrossRef] [Green Version]
- Zheng, L.; Zhang, D.; Wang, Y. Vibration and damping characteristics of cylindrical shells with active constrained layer damping treatments. Smart Mater. Struct. 2011, 20, 025008. [Google Scholar] [CrossRef]
- Lu, J.; Wang, P.; Zhan, Z. Active vibration control of thin-plate structures with partial SCLD treatment. Mech. Syst. Signal Process. 2017, 84, 531–550. [Google Scholar] [CrossRef]
- Li, W.; Yang, Z.; Li, K.; Wang, W. Hybrid feedback PID-FxLMS algorithm for active vibration control of cantilever beam with piezoelectric stack actuator. J. Sound Vib. 2021, 509, 116243. [Google Scholar] [CrossRef]
- Gupta, A.; Panda, S. Hybrid damping treatment of a layered beam using a particle-filled viscoelastic composite layer. Compos. Struct. 2021, 262, 113623. [Google Scholar] [CrossRef]
- Huang, Z.; Pan, J.; Yang, Z.; Wang, X.; Chu, F. Transverse Vibration of Viscoelastic Sandwich Structures: Finite Element Modeling and Experimental Study. Materials 2021, 14, 7751. [Google Scholar] [CrossRef]
- Li, L.; Zhang, D.; Guo, Y. Dynamic modeling and analysis of a rotating flexible beam with smart ACLD treatment. Compos. Part B: Eng. 2017, 131, 221–236. [Google Scholar] [CrossRef]
- Lu, J.; Zhan, Z.; Liu, X.; Wang, P. Numerical modeling and model updating for smart laminated structures with viscoelastic damping. Smart Mater. Struct. 2018, 27, 075038. [Google Scholar] [CrossRef]
- Cao, Y.Q. Study on Vibration and Noise Control for Car Body Structure Based on Smart Constrained Layer Damping. Ph.D. Thesis, Chongqing University, Chongqing, China, 2011. [Google Scholar]
- Zhang, D.D. Research on Multi-Objective Optimization and Adaptive Control of Damping Structures with Active Restraint Layer. Ph.D. Thesis, Chongqing University, Chongqing, China, 2011. [Google Scholar]
- Lepoittevin, G.; Kress, G. Optimization of segmented constrained layer damping with mathematical programming using strain energy analysis and modal data. Mater. Des. 2010, 31, 14–24. [Google Scholar] [CrossRef]
- Felippe, W.; Barbosa, F. A nondeterministic GHM based model applied to sandwich beams. Procedia Eng. 2017, 199, 1098–1103. [Google Scholar] [CrossRef]
- Qu, Z.-Q. A Multi-Step Method for Matrix Condensation of Finite Element Models. J. Sound Vib. 1998, 214, 965–971. [Google Scholar] [CrossRef]
- Kamil, H.G.; Makki, O.T.; Umran, H.M. Optimal tuning of a Linear Quadratic Regulator for Position Control using Particle Swarm Optimisation. IOP Conf. Ser. Mater. Sci. Eng. 2020, 671, 012047. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Qin, Z.; Chu, F. Nonlinear forced vibrations of functionally graded piezoelectric cylindrical shells under electric-thermo-mechanical loads. Int. J. Mech. Sci. 2021, 201, 106474. [Google Scholar] [CrossRef]
- Ray, M.; Reddy, J. Active damping of laminated cylindrical shells conveying fluid using 1–3 piezoelectric composites. Compos. Struct. 2013, 98, 261–271. [Google Scholar] [CrossRef]
- Shah, P.H.; Ray, M.C. Active Structural-Acoustic Control of Laminated Composite Truncated Conical Shells Using Smart Damping Treatment. J. Vib. Acoust. 2013, 135, 021001. [Google Scholar] [CrossRef]
- Mohammed, H.A.U.Q.; Wasmi, H.R. Active Vibration Control of Cantilever Beam by Using Optimal LQR Controller. J. Eng. 2018, 24, 11. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Guo, Q.; Shi, G. Laminated piezoelectric beam element for dynamic analysis of piezolaminated smart beams and GA-based LQR active vibration control. Compos. Struct. 2020, 252, 112480. [Google Scholar] [CrossRef]
- Ezzraimi, M.; Tiberkak, R.; Melbous, A.; Rechak, S. LQR and PID Algorithms for Vibration Control of Piezoelectric Composite Plates. Mechanika 2018, 24, 734–740. [Google Scholar] [CrossRef] [Green Version]
- Mastali, M.; Kheyroddin, A.; Samali, B.; Vahdani, R. Optimal placement of active braces by using PSO algorithm in near- and far-field earthquakes. Int. J. Adv. Struct. Eng. 2016, 8, 29–44. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | CFFF | CFCF | CCCC | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| (HZ) | MATLAB | ANSYS | [21] | Test | MATLAB | ANSYS | Test | MATLAB | ANSYS | Test | Error |
| 1 | 20.704 | 20.5635 | 20.446 | 20.312 | 134.55 | 132.4372 | 131.571 | 572.73 | 569.21 | 587.02 | 0.5% |
| 2 | 89.305 | 87.1448 | 88.778 | 88.753 | 216.79 | 209.4320 | 210.242 | 704.08 | 691.26 | 698.61 | 1.2% |
| 3 | 130.77 | 125.620 | 126.54 | 127.52 | 373.48 | 362.7831 | 368.721 | 1029.5 | 1010.53 | 1021.4 | 2.0% |
| 4 | 291.06 | 281.926 | 283.41 | 284.25 | 491.15 | 479.9264 | 482.414 | 1571.3 | 1534.64 | 1565.7 | 3.2% |
| 5 | 368.78 | 354.211 | 357.14 | 358.24 | 634.85 | 621.2412 | 628.457 | 2310.2 | 2284.41 | 2301.8 | 4.4% |
| Mode | Not Covered | Cover 1–2 Units | Cover 1–4 Units | Cover 1–6 Units | Cover 1–8 Units | |||||
|---|---|---|---|---|---|---|---|---|---|---|
| (HZ) | CFFF | CFCF | CFFF | CFCF | CFFF | CFCF | CFFF | CFCF | CFFF | CFCF |
| 1 | 20.704 | 134.55 | 20.912 | 132.04 | 20.620 | 109.82 | 18.676 | 96.811 | 15.229 | 96.135 |
| 2 | 89.305 | 216.79 | 89.361 | 211.86 | 84.974 | 176.44 | 74.891 | 156.46 | 64.773 | 155.11 |
| 3 | 130.77 | 373.48 | 128.58 | 344.70 | 110.05 | 318.16 | 104.31 | 277.80 | 93.775 | 266.59 |
| 4 | 291.06 | 491.15 | 280.54 | 450.47 | 239.99 | 419.02 | 235.78 | 365.94 | 208.01 | 350.58 |
| 5 | 368.78 | 634.85 | 340.74 | 610.48 | 313.75 | 504.63 | 284.07 | 459.06 | 263.43 | 453.34 |
| Size (WC) | Rank (WC) | Size (WO) | Rank (WO) | |
|---|---|---|---|---|
| Full model | 168 | 72 | 168 | 81 |
| Dynamic condensation | 92 | 46 | 92 | 51 |
| State-space | 10 | 10 | 10 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, Z.; Peng, H.; Wang, X.; Chu, F. Modeling and Vibration Control of Sandwich Composite Plates. Materials 2023, 16, 896. https://doi.org/10.3390/ma16030896
Huang Z, Peng H, Wang X, Chu F. Modeling and Vibration Control of Sandwich Composite Plates. Materials. 2023; 16(3):896. https://doi.org/10.3390/ma16030896
Chicago/Turabian StyleHuang, Zhicheng, Huanyou Peng, Xingguo Wang, and Fulei Chu. 2023. "Modeling and Vibration Control of Sandwich Composite Plates" Materials 16, no. 3: 896. https://doi.org/10.3390/ma16030896