
An SMA Transducer for Sensing Tactile Sensation Focusing on Stroking Motion


Abstract
:1. Introduction
2. SMA Sensor and Tactile Sensing System
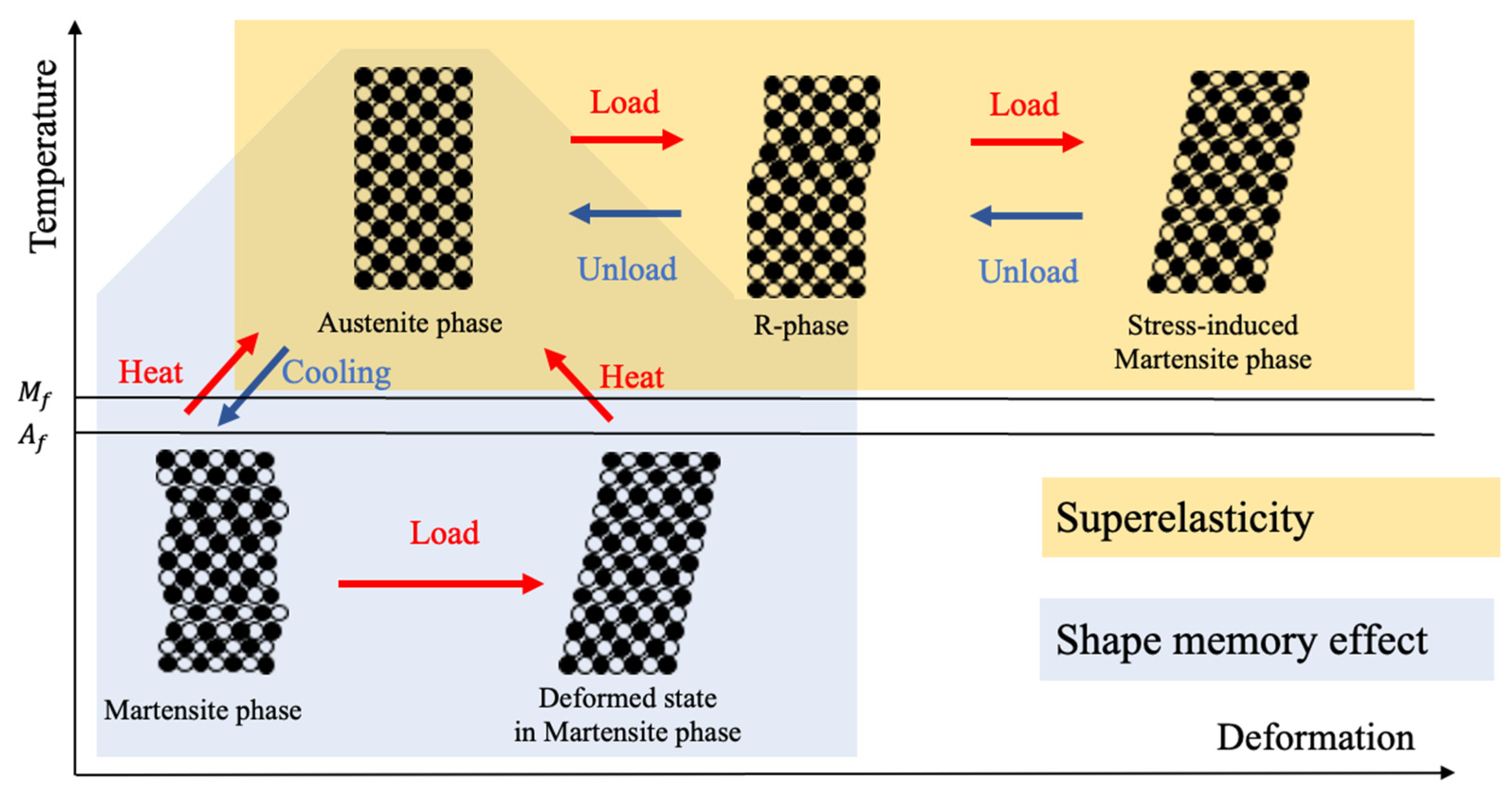
2.1. Physical Properties of SMAs
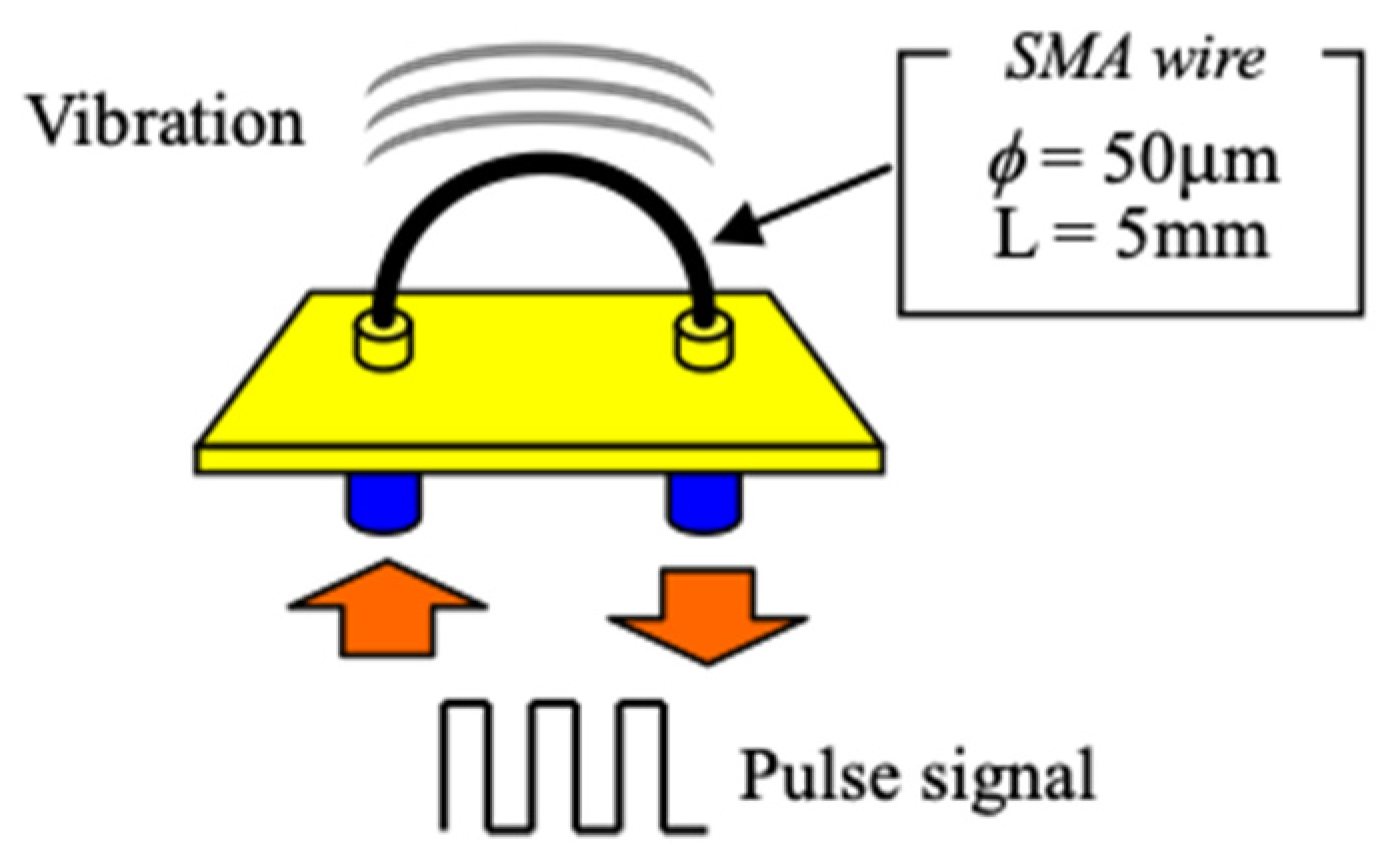
2.2. Filiform SMAs for Micro-Vibration Actuators
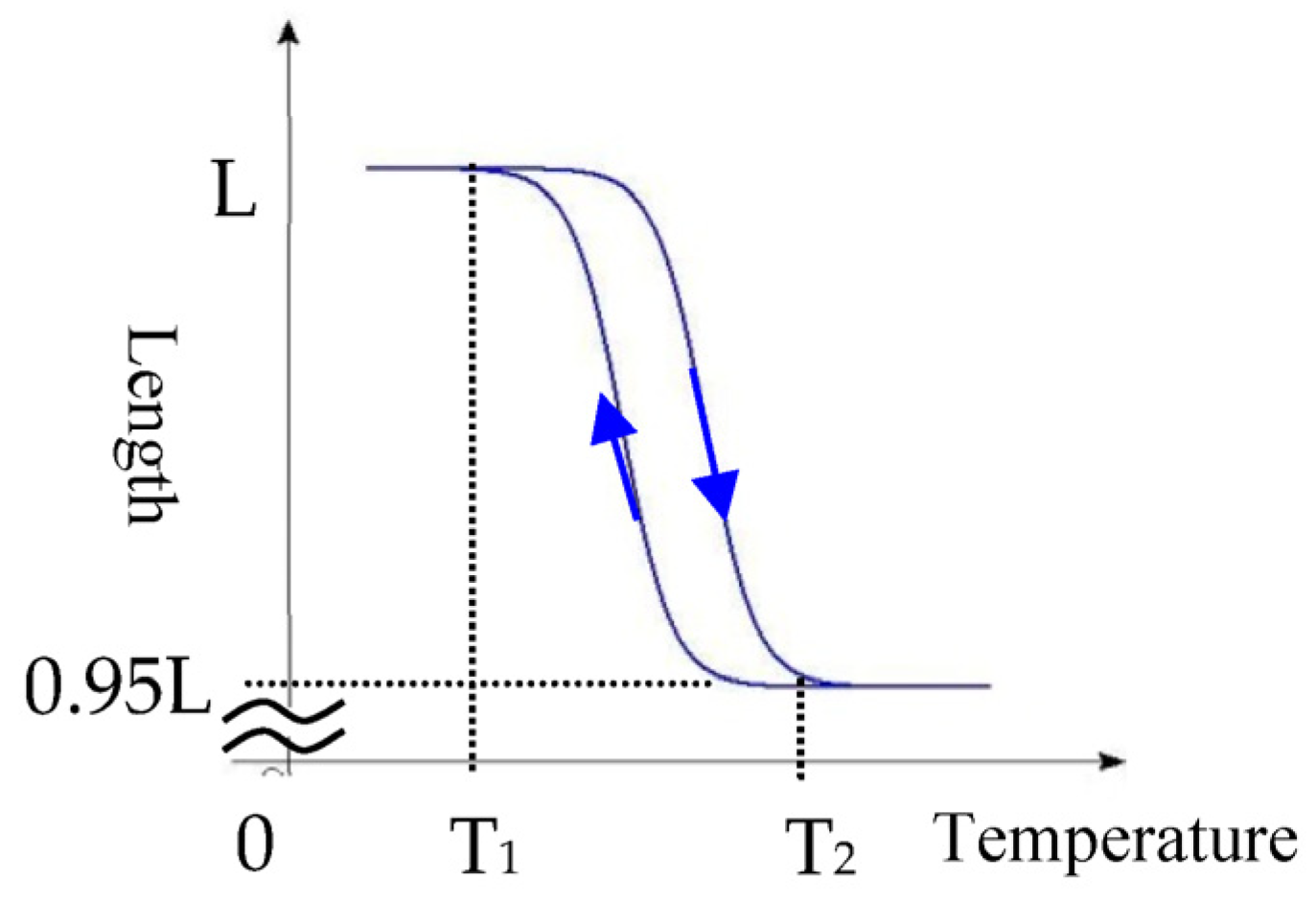
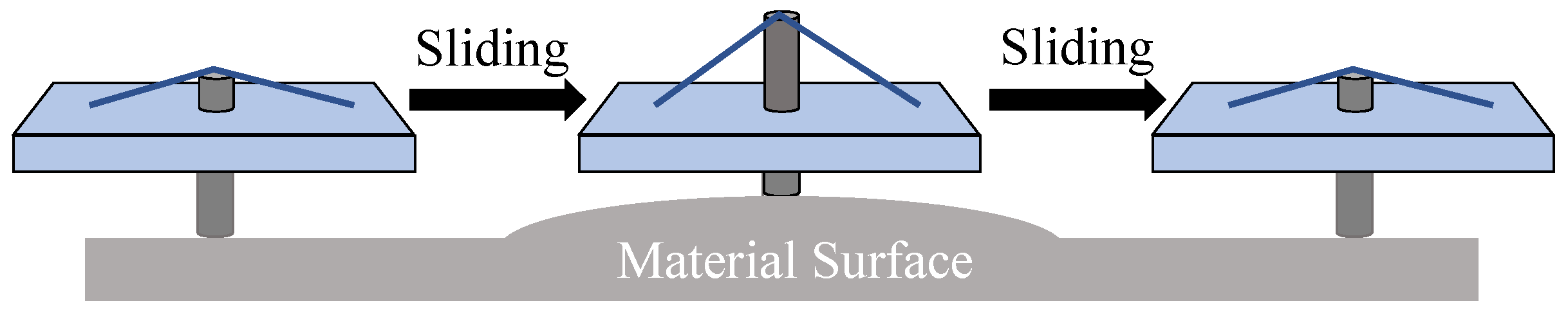
2.3. SMA Wires for Force Sensing
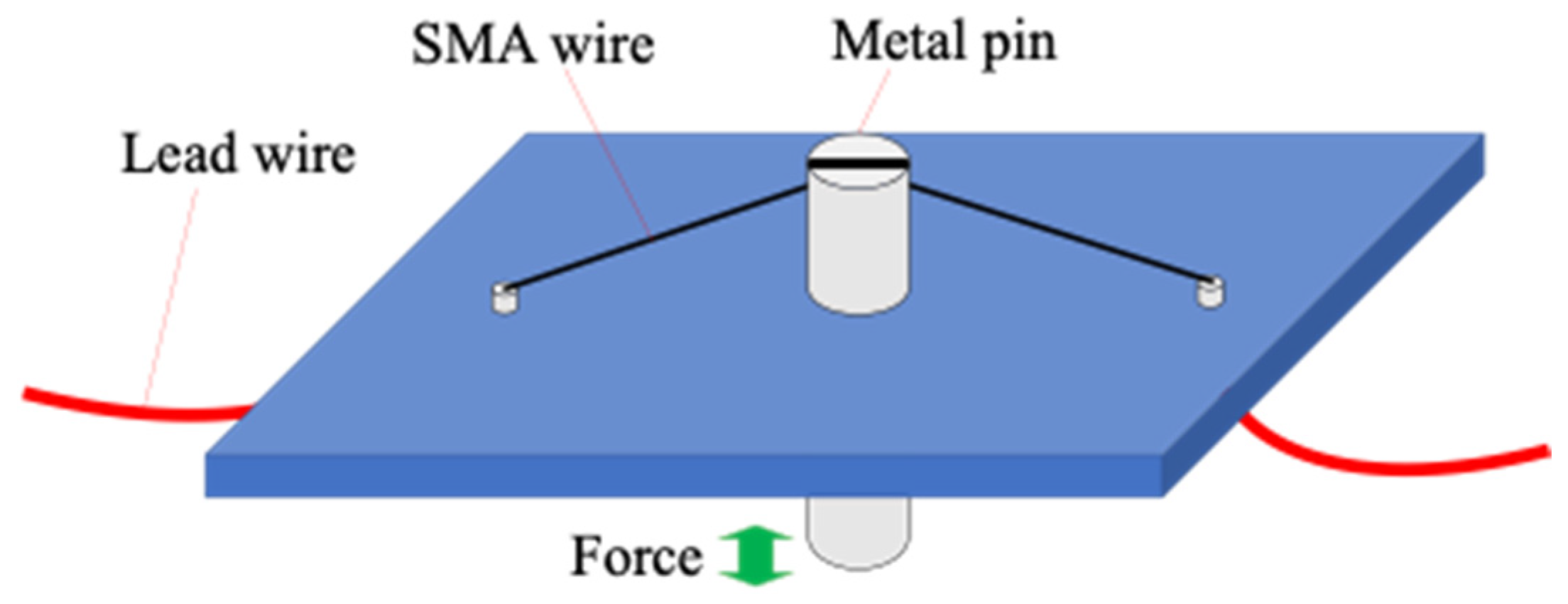
2.4. Structure of SMA Tactile Sensing System
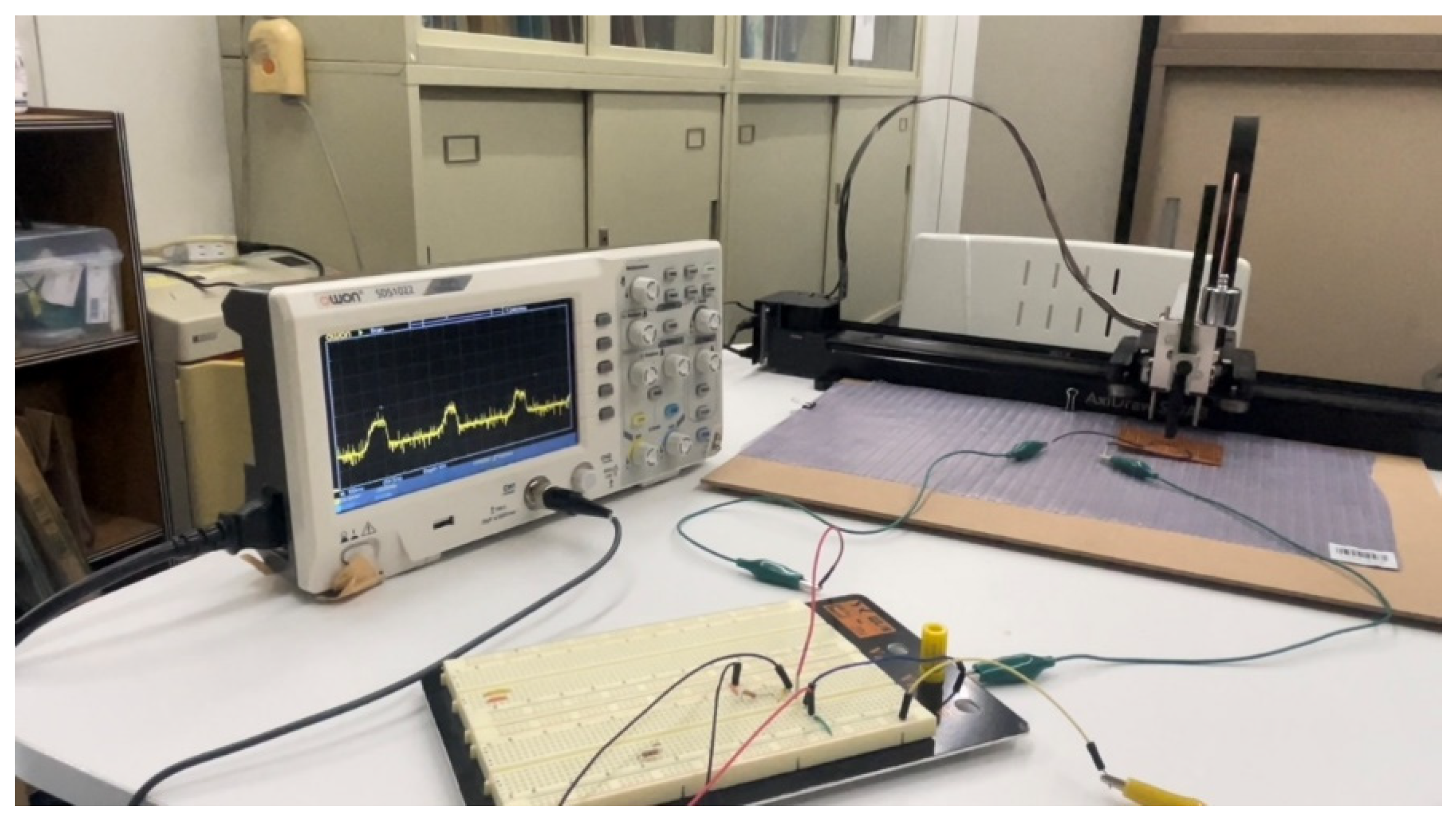
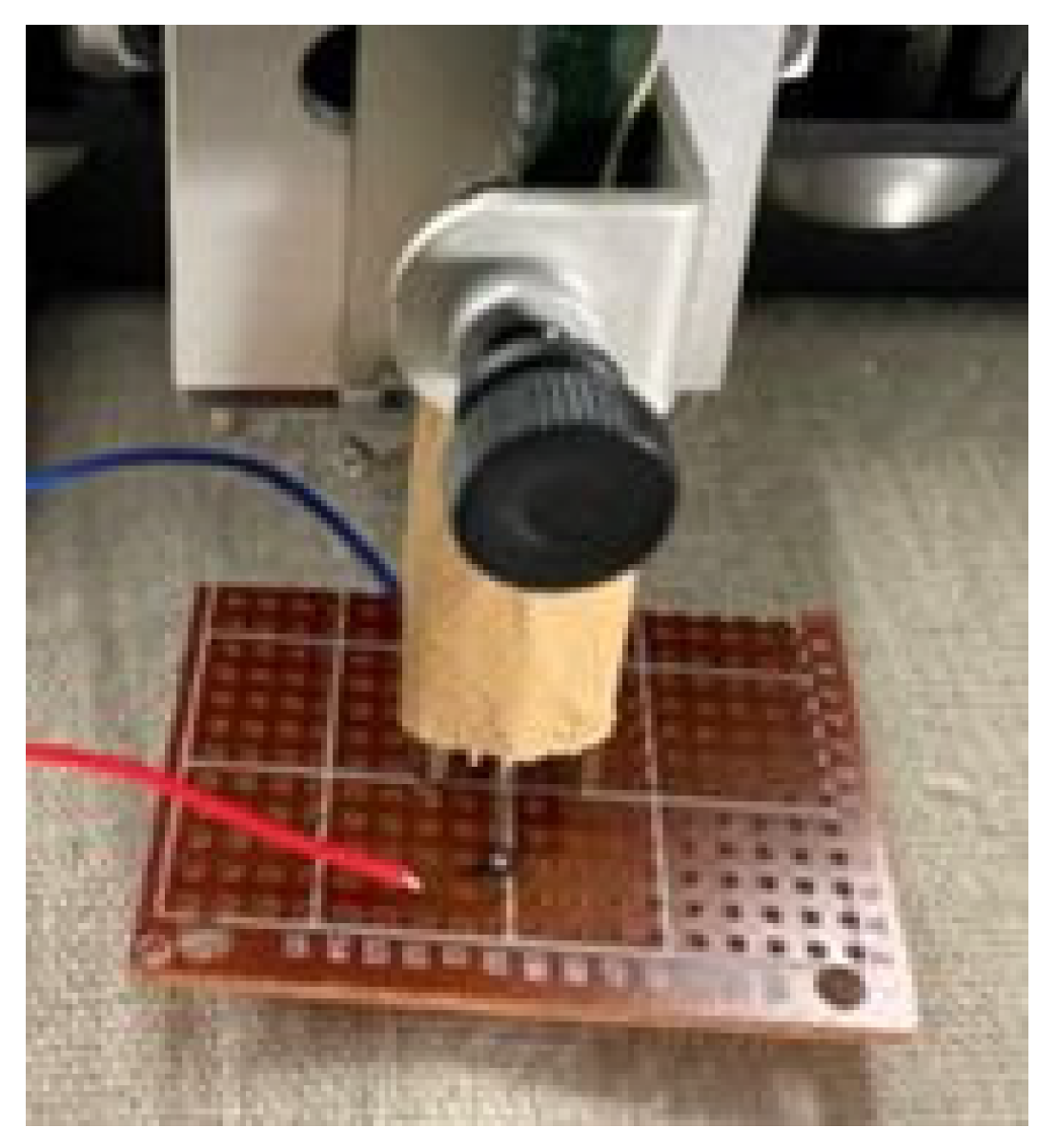
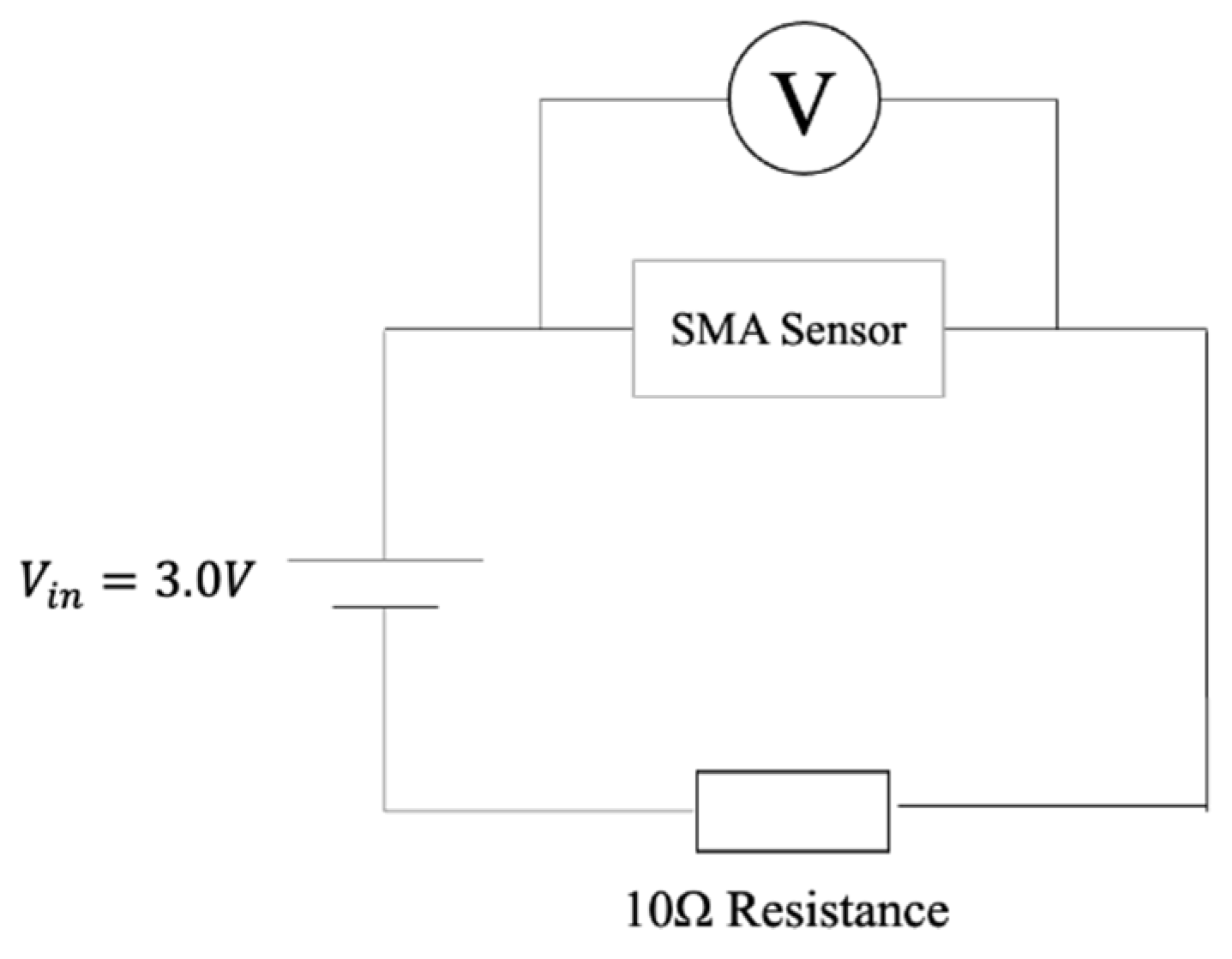
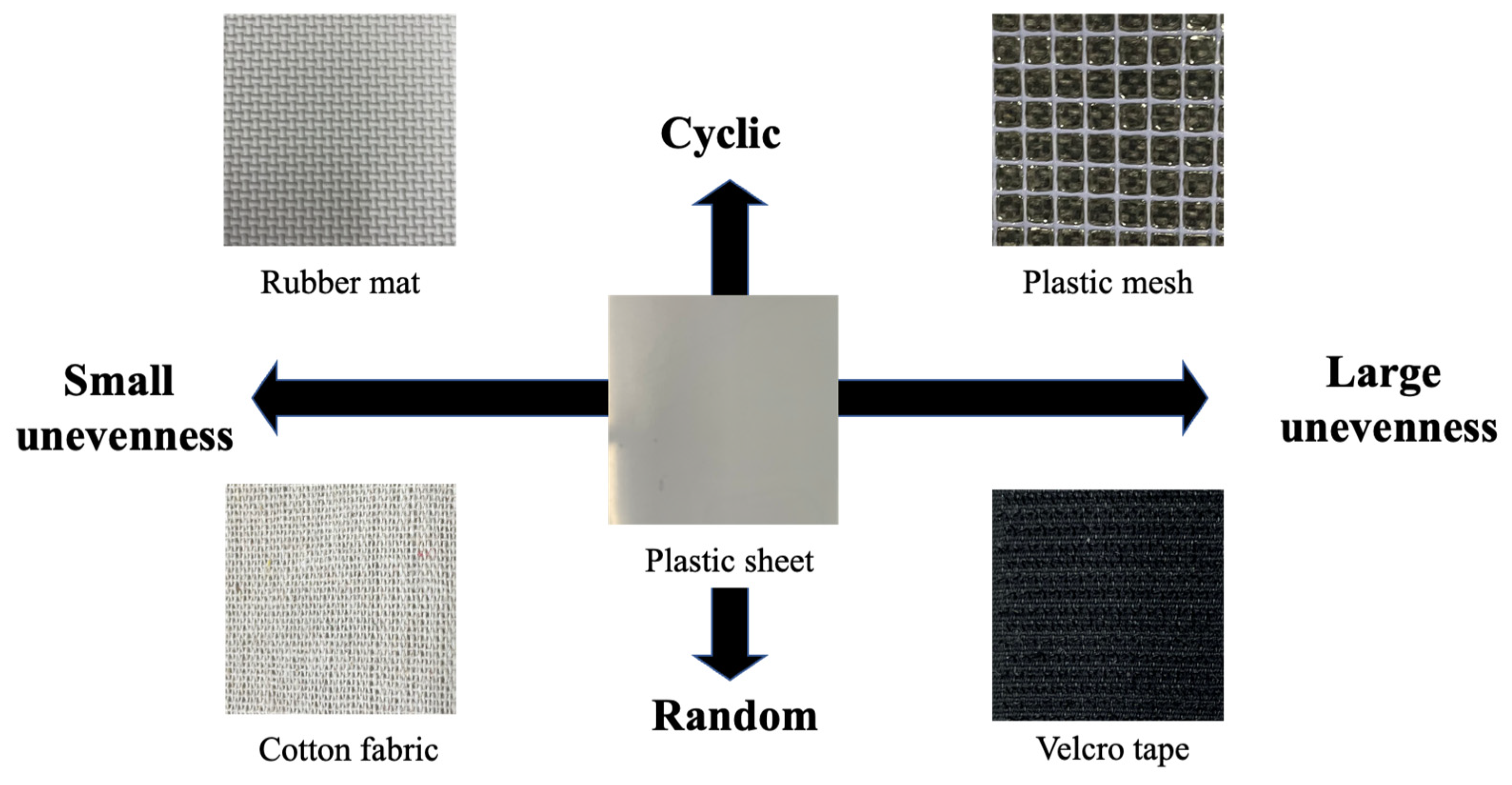
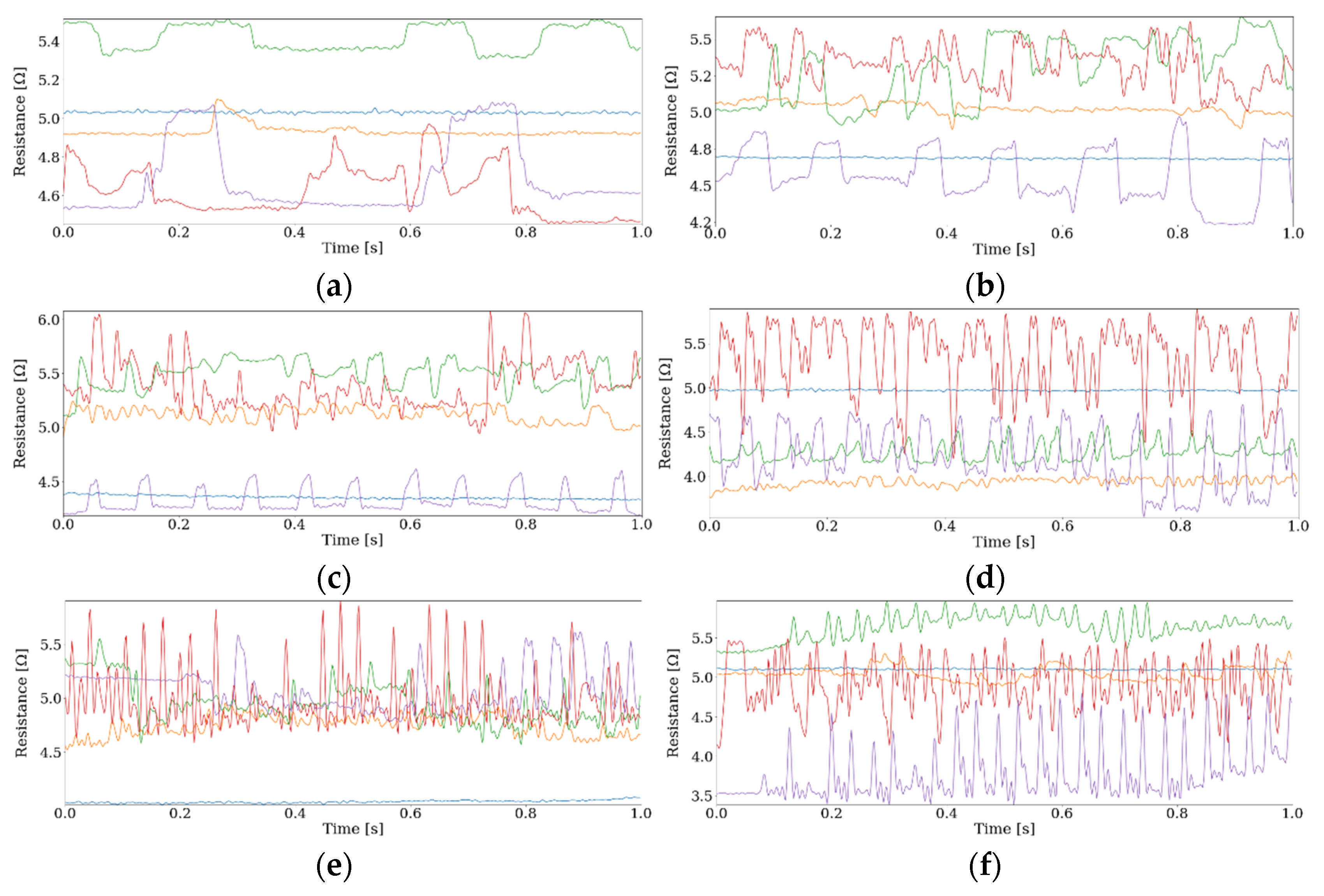
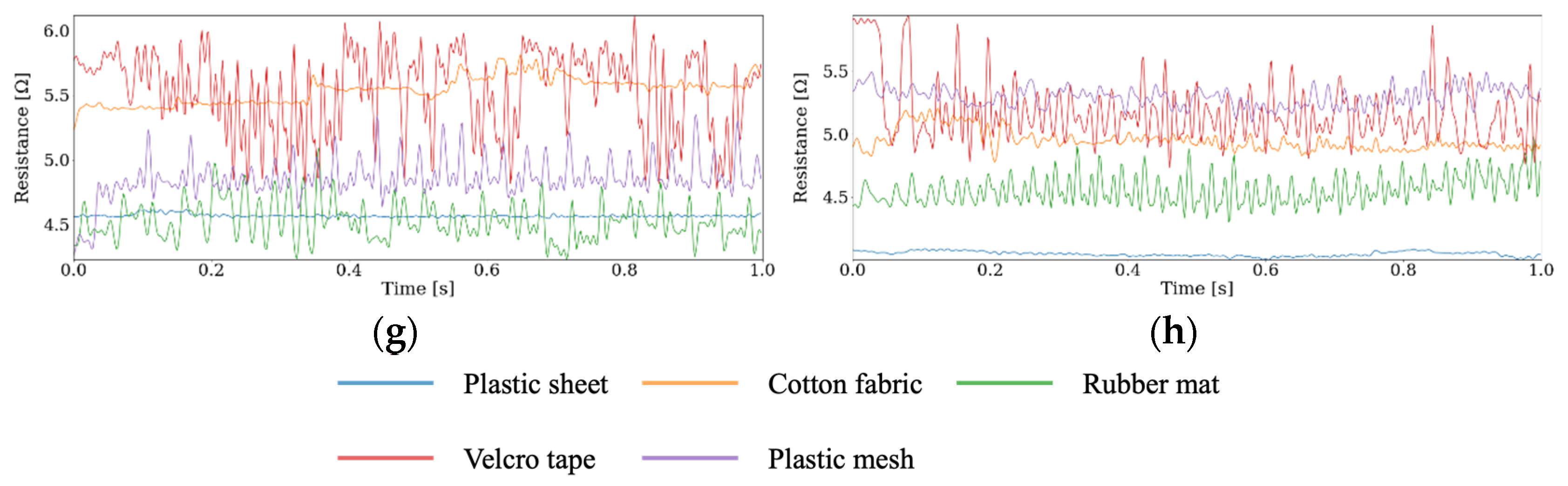
3. Preliminary Experiment
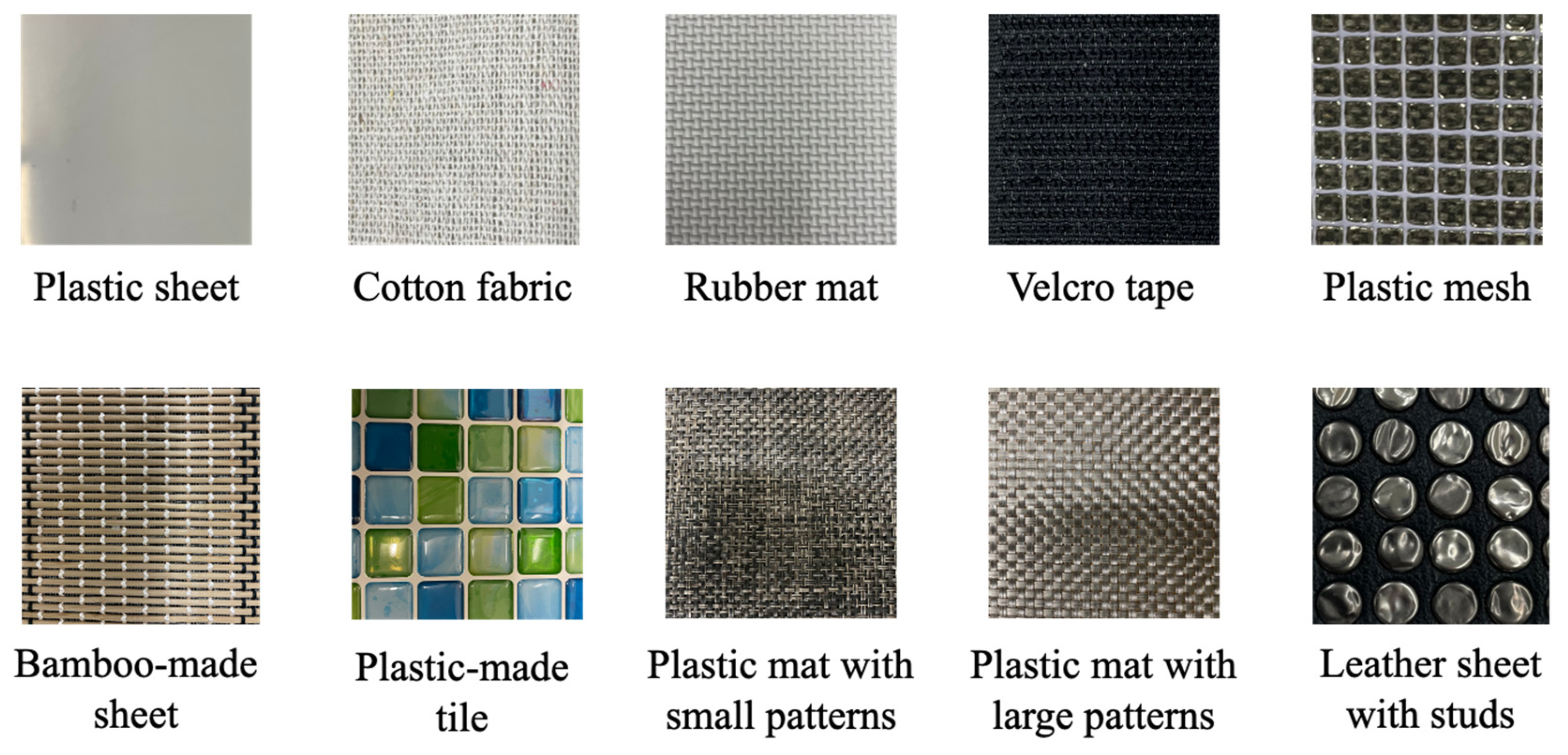
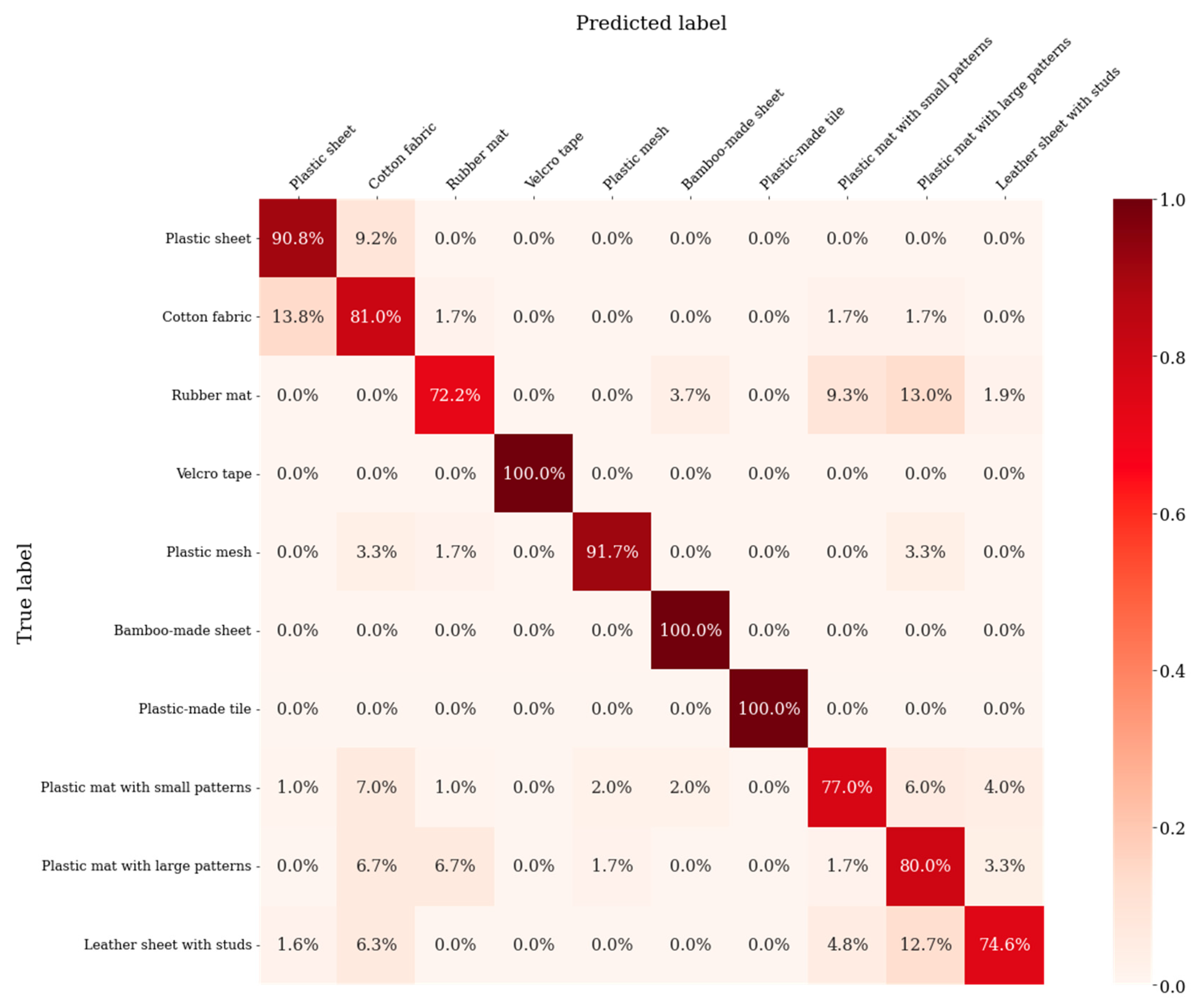
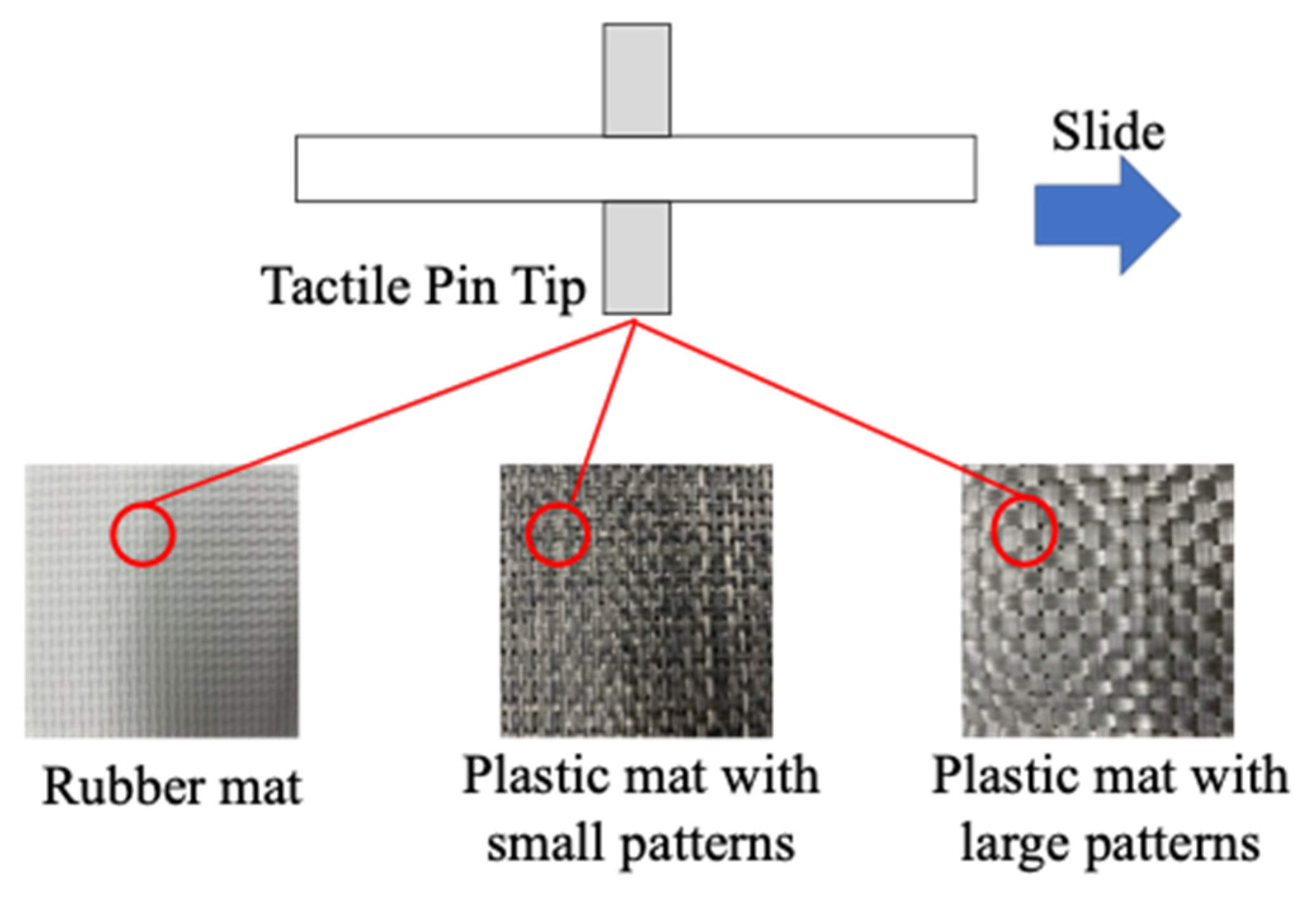
4. Tactile Classification Using SMA Sensing System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tiwana, M.I.; Redmond, S.J.; Lovell, N.H. A review of tactile sensing technologies with applications in biomedical engineering. Sens. Actuators A Phys. 2012, 179, 17–31. [Google Scholar] [CrossRef]
- Claver, U.P.; Zhao, G. Recent progress in flexible pressure sensors based electronic skin. Adv. Eng. Mater. 2021, 23, 2001187. [Google Scholar] [CrossRef]
- Zou, L.; Ge, C.; Wang, Z.; Cretu, E.; Li, X. Novel tactile sensor technology and smart tactile sensing systems: A review. Sensors 2017, 17, 2653. [Google Scholar] [CrossRef] [PubMed]
- Lee, H.-K.; Chang, S.-L.; Yoon, E. A Flexible Polymer Tactile Sensor: Fabrication and Modular Expandability for Large Area Deployment. J. Microelectromechanical Syst. 2006, 15, 1681–1686. [Google Scholar] [CrossRef]
- Mannsfeld, S.; Tee, B.; Stoltenberg, R.; Chen, C.; Barman, S.; Muir, B.; Sokolov, A.; Reese, C.; Bao, Z. Highly sensitive flexible pressure sensors with microstructured rubber dielectric layers. Nat. Mater. 2010, 9, 859–864. [Google Scholar] [CrossRef]
- Zhu, S.-E.; Krishna Ghatkesar, M.; Zhang, C.; Janssen, G.C.A.M. Graphene based piezoresistive pressure sensor. Appl. Phys. Lett. 2013, 102, 161904. [Google Scholar] [CrossRef] [Green Version]
- Stassi, S.; Cauda, V.; Canavese, G.; Pirri, C.F. Flexible tactile sensing based on piezoresistive composites: A review. Sensors 2014, 14, 5296–5332. [Google Scholar] [CrossRef] [Green Version]
- Ward-Cherrier, B.; Pestell, N.; Cramphorn, L.; Winstone, B.; Giannaccini, M.E.; Rossiter, J.; Lepora, N.F. The TacTip Family: Soft Optical Tactile Sensors with 3D-Printed Biomimetic Morphologies. Soft Robot. 2018, 5, 216–227. [Google Scholar] [CrossRef] [Green Version]
- Sferrazza, C.; D’Andrea, R. Design, motivation and evaluation of a full-resolution optical tactile sensor. Sensors 2019, 19, 928. [Google Scholar] [CrossRef] [Green Version]
- Dargahi, J. Piezoelectric tactile sensor with three sensing elements for robotic, endoscopic and prosthetic applications. Sens. Actuators 2000, 80, 23–30. [Google Scholar] [CrossRef]
- Spanu, A.; Pinna, L.; Viola, F.; Seminara, L.; Valle, M.; Bonfiglio, A.; Cosseddu, P. A high-sensitivity tactile sensor based on piezoelectric polymer PVDF coupled to an ultra-low voltage organic transistor. Org. Electron. Phys. Mater. Appl. 2016, 36, 57–60. [Google Scholar] [CrossRef]
- Chuang, C.H.; Weng, H.K.; Cheng, J.W.; Shaikh, M.O. Ultrasonic tactile sensor integrated with TFT array for contact force measurements. In Proceedings of the 2017-19th International Conference on Solid-State Sensors, Actuators and Microsystems (TRANSDUCERS), Kaohsiung, Taiwan, 18–22 June 2017; pp. 512–515. [Google Scholar]
- Orii, H.; Tsuji, S.; Kouda, T.; Kohama, T. Tactile texture recognition using convolutional neural networks for time-series data of pressure and 6-axis acceleration sensor. In Proceedings of the IEEE International Conference on Industrial Technology, Toronto, ON, Canada, 22–25 March 2017; pp. 1076–1080. [Google Scholar]
- Gollerthan, S.; Young, M.L.; Baruj, A.; Frenzel, J.; Schmahl, W.W.; Eggeler, G. Fracture mechanics and microstructure in NiTi shape memory alloys. Acta Mater. 2009, 57, 1015–1025. [Google Scholar] [CrossRef]
- Gu, H.; Bumke, L.; Chluba, C.; Quandt, E.; James, R.D. Phase engineering and supercompatibility of shape memory alloys. Mater. Todays 2018, 21, 265–277. [Google Scholar] [CrossRef]
- Sun, F.; Hao, Y.L.; Nowak, S.; Gloriant, T.; Laheurte, P.; Prima, F. A thermo-mechanical treatment to improve the superelastic performances of biomedical Ti-26Nb and Ti-20Nb-6Zr (at.%) alloys. J. Mech. Behav. Biomed. Mater. 2011, 4, 1864–1872. [Google Scholar] [CrossRef]
- Niinomi, M.; Nakai, M.; Hieda, J. Development of new metallic alloys for biomedical applications. Acta Biomater. 2012, 8, 3888–3903. [Google Scholar] [CrossRef]
- Singh, K.; Sirohi, J.; Chopra, I. An Improved Shape Memory Alloy Actuator for Rotor Blade Tracking. J. Intell. Mater. Syst. Struct. 2003, 14, 767–786. [Google Scholar] [CrossRef]
- Costanza, G.; Tata, M.E. Shape Memory Alloys for Aerospace, Recent Developments, and New Applications: A Short Review. Materials 2020, 13, 1856. [Google Scholar] [CrossRef] [Green Version]
- Bellini, A.; Colli, M.; Dragoni, E. Mechatronic design of a shape memory alloy actuator for automotive tumble flaps: A case study. IEEE Trans. Ind. Electron. 2009, 56, 2644–2656. [Google Scholar] [CrossRef]
- Williams, E.A.; Shaw, G.; Elahinia, M. Control of an automotive shape memory alloy mirror actuator. Mechatronics 2010, 20, 527–534. [Google Scholar] [CrossRef]
- Sreekumar, M.; Nagarajan, T.; Singaperumal, M.; Zoppi, M.; Molfino, R. Critical review of current trends in shape memory alloy actuators for intelligent robots. Ind. Robot. 2007, 34, 285–294. [Google Scholar] [CrossRef]
- Noh, M.; Kim, S.-W.; An, S.; Koh, J.-S.; Cho, K.-J. Flea-inspired catapult mechanism for miniature jumping robots. IEEE Trans. Robot. 2012, 28, 1007–1018. [Google Scholar]
- Cladera, A.; Weber, B.; Leinenbach, C.; Czaderski, C.; Shahverdi, M.; Motavalli, M. Iron-based shape memory alloys for civil engineering structures: An overview. Constr. Build. Mater. 2014, 63, 281–293. [Google Scholar] [CrossRef]
- Shahverdi, M.; Czaderski, C.; Motavalli, M. Iron-based shape memory alloys for prestressed near-surface mounted strengthening of reinforced concrete beams. Constr. Build. Mater. 2016, 112, 28–38. [Google Scholar] [CrossRef]
- Alhuda Hamdan, N.; Wagner, A.; Voelker, S.; Steimle, J.; Borchers, J. Springlets: Expressive, flexible and silent on-skin tactile interfaces. In Proceedings of the Conference on Human Factors in Computing Systems, Glasgow, UK, 4–9 May 2019; pp. 1–14. [Google Scholar]
- Muthukumarana, S.; Elvitigala, D.S.; Forero Cortes, J.P.; Matthies, D.J.C.; Nanayakkara, S. Touch me Gently: Recreating the Perception of Touch using a Shape-Memory Alloy Matrix. In Proceedings of the Conference on Human Factors in Computing Systems, Honolulu, HI, USA, 25–30 April 2020; pp. 1–12. [Google Scholar]
- Formentini, M.; Lenci, S. An innovative building envelope (kinetic façade) with Shape Memory Alloys used as actuators and sensors. Autom. Constr. 2018, 85, 220–231. [Google Scholar] [CrossRef]
- Wang, W.; Zeng, W.; Weitong, R.; Eric, M.; Sonkusale, S. Thermo-Mechanically Trained Shape Memory Alloy for Temperature Recording With Visual Readout. IEEE Sens. Lett. 2021, 5, 9292656. [Google Scholar] [CrossRef]
- Ambrosino, C.; Capoluongo, P.; Campopiano, S.; Cutolo, A.; Giordano, M.; Davino, D.; Visone, C.; Cusano, A. Fiber Bragg Grating and Magnetic Shape Memory Alloy: Novel High-Sensitivity Magnetic Sensor. IEEE Sens. J. 2007, 7, 228–229. [Google Scholar] [CrossRef]
- Kumar, A.; Pawar, S.; Pandey, A.; Dutta, S.; Kaur, D. Anisotropic magnetoelectric functionality of ferromagnetic shape memory alloy heterostructures for MEMS magnetic sensors. J. Phys. D Appl. Phys. 2020, 53, 395302. [Google Scholar] [CrossRef]
- Nahm, S.H.; Kim, Y.I.; Kim, J.M.; Yoon, D.J. A study on the application of Ni-Ti shape memory alloy as a sensor. Mater. Sci. Forum 2005, 475–479, 2043–2046. [Google Scholar] [CrossRef]
- Nagai, H.; Oishi, R. Shape memory alloys as strain sensors in composites. Smart Mater. Struct. 2006, 15, 493–498. [Google Scholar] [CrossRef]
- Bhattacharya, K. Microstructure of Martensite: Why it Forms and How it Gives Rise to the Shape-Memory Effect; Oxford University Press: Oxford, UK, 2003. [Google Scholar]
- Mizukami, Y.; Sawada, H. Tactile information transmission by apparent movement phenomenon using shape-memory alloy device. Int. J. Disabil. Hum. Dev. 2006, 5, 277–284. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 5999–6009. [Google Scholar]
- Wu, N.; Green, B.; Ben, X.; O’Banion, S. Deep Transformer Models for Time Series Forecasting: The Influenza Prevalence Case. arXiv 2020, arXiv:2001.08317. [Google Scholar]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Property | Value |
|---|---|
| Standard diameter (µm) | 75 |
| Practical force produced (load) (gf) | 35 |
| Practical kinetic strain (%) | 4.0 |
| Standard drive current (mA) | 140 |
| Standard drive voltage (V/m) | 35.4 |
| Standard power (W/m) | 4.63 |
| Standard resistance (Ω/m) | 236 |
| Tensile strength (Kgf) | 0.45 |
| Weight (mg/m) | 28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oya, R.; Sawada, H. An SMA Transducer for Sensing Tactile Sensation Focusing on Stroking Motion. Materials 2023, 16, 1016. https://doi.org/10.3390/ma16031016
Oya R, Sawada H. An SMA Transducer for Sensing Tactile Sensation Focusing on Stroking Motion. Materials. 2023; 16(3):1016. https://doi.org/10.3390/ma16031016
Chicago/Turabian StyleOya, Ryusei, and Hideyuki Sawada. 2023. "An SMA Transducer for Sensing Tactile Sensation Focusing on Stroking Motion" Materials 16, no. 3: 1016. https://doi.org/10.3390/ma16031016