1. Introduction
Composite shells find widespread applications across various industries, including aviation, machinery, and even construction [
1,
2]. These shells, known for their high strength-to-weight ratio and tailored material properties, have paved the way for innovative designs and improved performance in structural components. The efficacy of composite materials, however, is deeply intertwined with the meticulous selection of specific parameters, such as the matrix-to-reinforcement ratio and the orientation of the reinforcement, which play pivotal roles in shaping the mechanical behavior of these materials.
The optimization of these parameters has become a paramount pursuit, offering a means to attain desired characteristics and performance metrics [
2,
3,
4]. The optimization process, whether aimed at achieving optimal dynamic responses, static stiffness under defined loads, critical buckling loads, material cost-effectiveness, or other engineering objectives, presents multifaceted challenges. Conventional gradient-based optimization techniques have proven efficacious in swiftly locating minima in many functions; however, their limitations are conspicuous when grappling with intricate, multimodal objective functions.
Amidst these complexities, stochastic optimization approaches emerge as promising alternatives, capable of approximating near-global optima in intricate, non-linear landscapes. Within the realm of stochastic optimization, evolutionary algorithms, drawing inspiration from biological processes, have garnered considerable interest from researchers. Among these, genetic algorithms stand out as prominent candidates for tackling optimization problems due to their ability to explore vast solution spaces effectively [
5,
6,
7,
8].
However, the wide-scale application of these methods is constrained by the computationally intensive nature of the optimization process. Conventional approaches necessitate a substantial number of objective function evaluations, particularly when the function values are computed using computationally intensive techniques such as Finite Element Method (FEM). This numerical burden prolongs the optimization process and exacerbates numerical instability issues.
The adoption of surrogate models emerges as a solution to alleviate these computational challenges [
9,
10]. Surrogate models, often based on artificial neural networks, offer an expedited means of approximating objective function values using a previously prepared dataset of patterns. Surrogate models enable faster and more efficient optimization procedures by circumventing the need for intricate numerical computations like FEM, significantly reducing the computational overhead.
Kalita et al. [
11] conducted a comprehensive review of nearly 300 research articles on high-fidelity and metamodel-based optimization of composite laminates. This review emphasizes various metamodels and succinctly presents each research article’s methodologies and key outcomes, offering a valuable resource for future researchers and design engineers.
A global numerical approach for lightweight design optimization of laminated composite plates subjected to frequency constraints was presented in [
12]. Their method utilizes an adaptive elitist differential evolution algorithm to solve the optimization problem with both integer and continuous variables, demonstrating its efficiency and reliability. Bargh et al. [
13] applied the Particle Swarm Optimization (PSO) algorithm to optimize the lay-up design of symmetrically laminated composite plates for maximizing the fundamental frequency. The efficiency of the PSO algorithm was compared with the simple genetic algorithm, and the method’s effectiveness was validated against the existing literature results. In another study by Vo Duy et al. [
14], the authors focused on multi-objective optimization problems of laminated composite beam structures. They aimed to minimize the beam’s weight and maximize its natural frequency. The study employed the Nondominated Sorting Genetic Algorithm II (NSGA-II) to tackle the optimization problem, showcasing the approach’s effectiveness for problems with both discrete and continuous design variables.
Tanaka [
15] introduced a multi-objective optimization method for variable-thickness carbon fiber placement in composite laminates. The method aimed to achieve high strength and low weight by optimizing fiber orientation and thickness distribution using the Christensen fracture criterion and mean curvature as objective functions. In [
16], the simultaneous optimization of stiffness and buckling load of composite laminate plates with curvilinear fiber paths has been tackled. This approach integrated surrogate modeling into an evolutionary algorithm, resulting in efficient optimization that simultaneously improved stiffness and buckling load over quasi-isotropic laminates.
Lee and Lin [
17] presented a regression equation-based response surface approach to estimate the behavior of composite laminated structures, reducing the computational time required for optimization. The approach was validated with examples such as a marine propeller and a rotor wing, demonstrating both efficiency and accuracy. The same authors [
18] enhanced a standard Genetic Algorithm (GA) by introducing local improvement and utilizing regression modeling for real calculation. The improved GA showed quicker convergence and significantly reduced calculation time. The approach’s efficacy was demonstrated through applications to a sandwich plate and composite propeller.
Drosopoulos et al. [
19] proposed a multi-objective optimization study for the cost-effective design of nano-reinforced laminates. Their approach utilized the NSGA-II to optimize a hybrid laminate with conventional fibers and graphene nanoplatelets reinforcement. The optimization achieved enhanced fundamental frequency and reduced cost.
In [
20], a global-local search strategy for the optimal design of laminated composite cylindrical shells with maximum fundamental frequency has been presented. The strategy employed the sequential permutation search algorithm for global optimization and the Ritz method for vibration analysis, offering a comprehensive approach for cylindrical shell design optimization. Sayegh [
21] introduced an alternative approach to multi-objective optimization for detailed building models using reduced sequences in both sequential and adaptive strategies. These methods efficiently reproduced the Pareto front with reduced computational time and errors, showcasing their potential for optimizing complex systems.
The results of previous studies conducted by Miller and Ziemiański on single- and multi-objective optimization, including aspects such as maximizing the fundamental natural frequency, broadening frequency-free bands, and maximizing critical buckling load, have been presented in [
22,
23,
24,
25,
26]. The present work significantly extends the scope of the previous findings.
In this context, this paper delves into the utilization of surrogate models in multi-objective optimization of composite shells. The study explores the application of Deep Neural Networks (DNN, see [
27,
28,
29]) trained on a dataset of patterns to approximate objective function values, subsequently aiding in optimizing complex systems with diverse performance metrics. The investigation considers various optimization scenarios, including maximizing fundamental natural frequencies, optimizing frequency bandwidths, and optimizing cost parameters [
30]. Additionally, the impact of mode shape identification and network ensembles on the performance of the optimization process is explored.
Surrogate models in multi-objective optimization: Surrogate models approximate complex simulations’ behavior, providing an efficient alternative to the computationally expensive Finite Element Analysis (FEA). In this study, surrogate models are employed to approximate the relationship between input parameters and the fundamental natural frequency (), or width of frequency bands around different frequencies free from the structure’s natural frequencies. This allows for the exploration of a broad range of design possibilities without the need for a large number of FEA simulations.
Mode shapes identification and optimization accuracy: To improve the accuracy of surrogate models, mode shape identification is introduced as a preprocessing step. By identifying and analyzing mode shapes, the precision of surrogate models is enhanced, particularly in optimization of and frequency bands. The results demonstrate that the incorporation of mode shapes identification significantly improves the optimization process, providing more reliable and accurate Pareto fronts.
Utilizing network ensembles: To mitigate potential weaknesses in individual surrogate models, network ensembles are employed. These ensembles consist of multiple unique surrogate models, and the final predictions are selected from the best-performing model in the ensemble. Using network ensembles mitigates the risk of suboptimal results and ensures greater robustness and reliability in the multi-objective optimization process.
Efficiency analysis: One of the key aspects of our study is the analysis of the number of FE calls required for the optimization process. The computational effort is comprehensively assessed across various scenarios, including different sizes of training sets for surrogate models. This analysis provides valuable insights into the trade-off between computational cost and optimization accuracy.
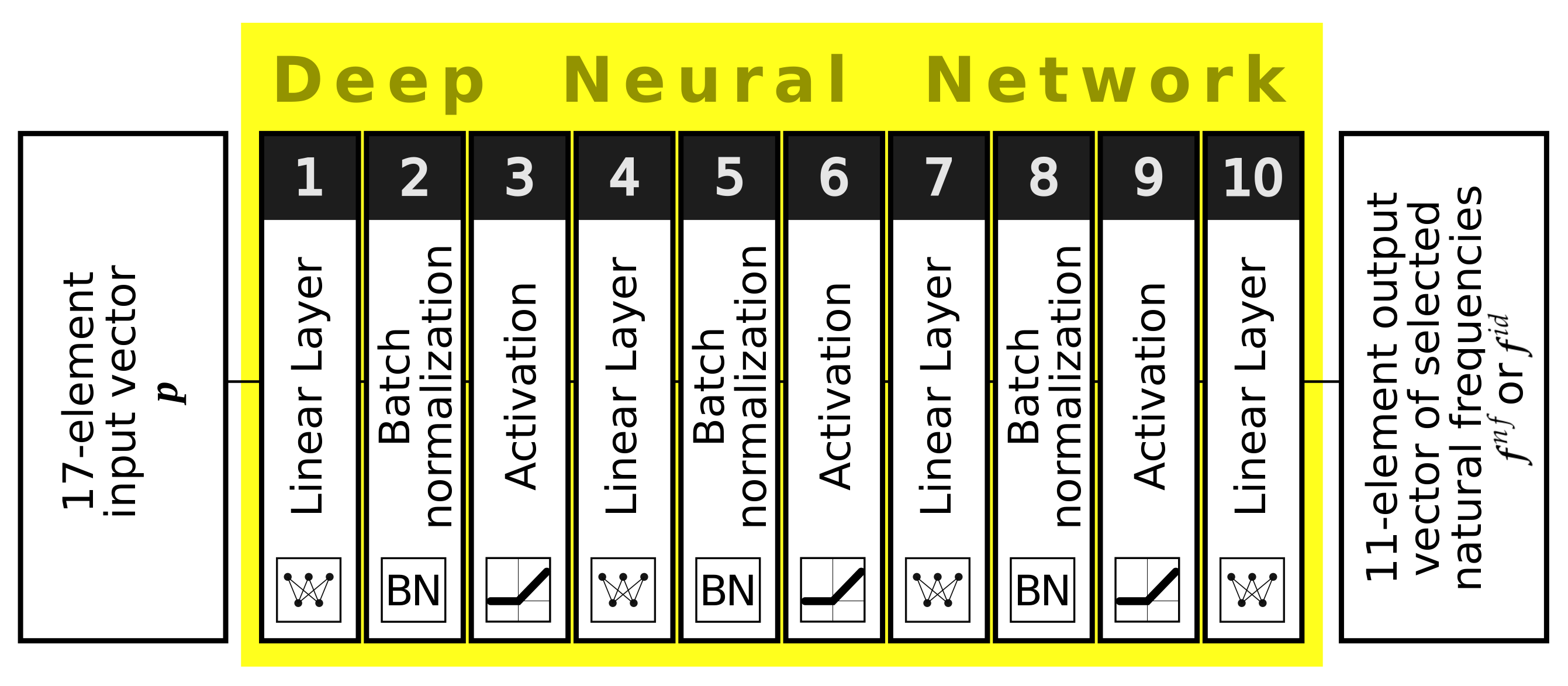
Complexity of input parameters: The complexity of real-world engineering challenges often entails a high number of input parameters. In this research, 17 input parameters are considered, including geometrical parameters, material properties, and lamination angles. The approach is designed to manage such complexities efficiently, enabling thorough design space exploration.
Comparison with the Monte Carlo approach: To evaluate the effectiveness of our proposed methodology, a comparison is made between results obtained from surrogate-based multi-objective optimization and those derived from the classical Monte Carlo (MC) approach. The comparison highlights the superiority of the approach in terms of convergence and accuracy in capturing the Pareto fronts.
Normalization of Pareto front indicators: In multi-objective optimization, comparing Pareto fronts acquired from different problems can be challenging due to variations in the scale and nature of the objectives. A normalization method for Pareto front indicators is proposed to address this challenge, enabling fair comparisons and better decision-making.
This study demonstrates the successful application of surrogate models, mode shape identification, and network ensembles in enhancing multi-objective optimization. By efficiently handling a high number of input parameters, this approach provides more accurate and reliable results. Incorporating mode shape identification significantly improves the accuracy of the optimization process. We believe that these findings will have broad implications for various engineering applications, contributing to the development of efficient and effective optimization methodologies.
4. The Results—Algorithmic Perspective
4.1. Introductory Remarks
The optimization process explored various configurations and combinations of surrogate models to find the most efficient and accurate approach. The following variations were considered:
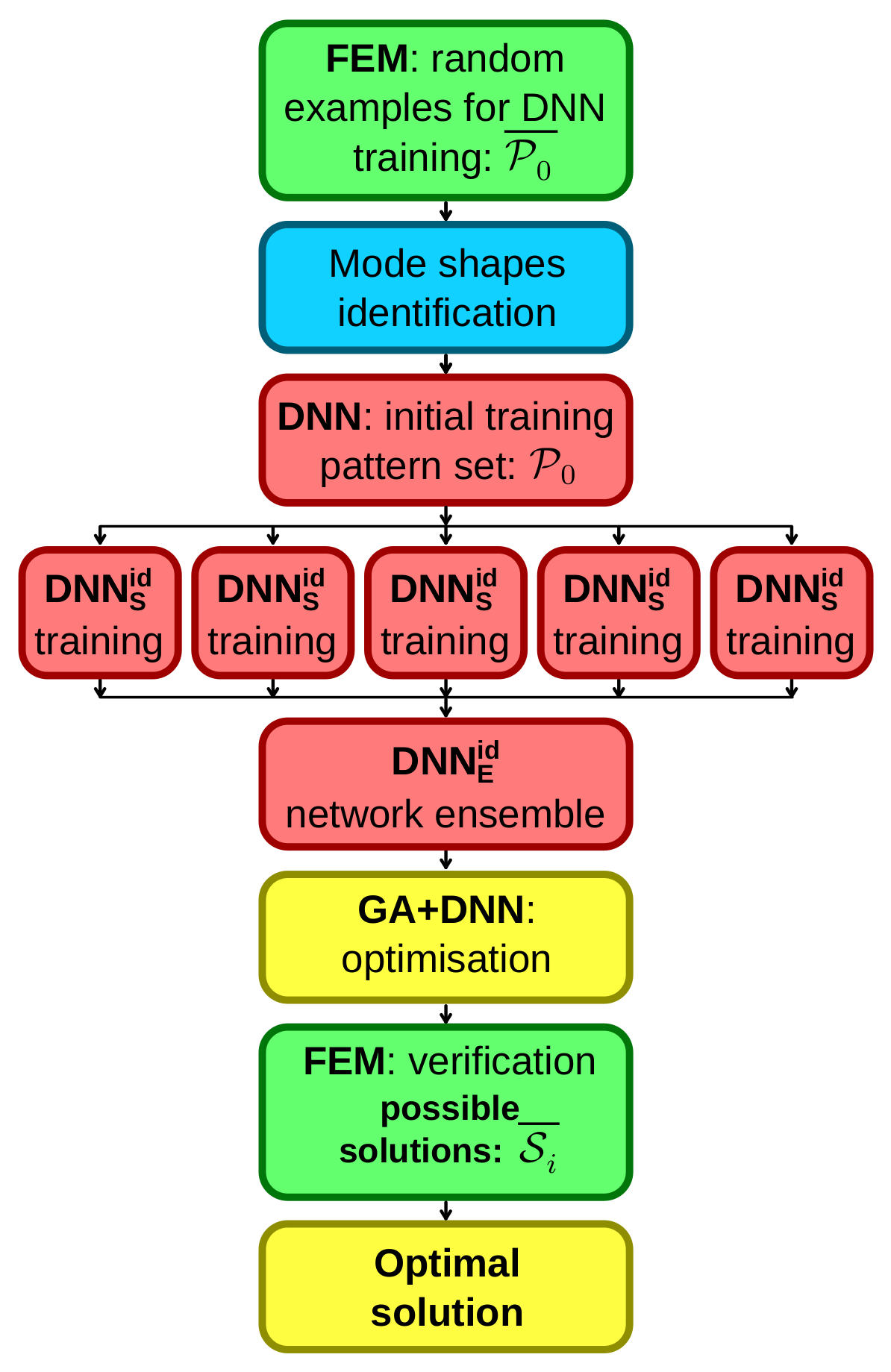
Single vs. ensemble surrogate model: Two types of surrogate models were compared, namely a single neural network and an ensemble of neural networks. The single neural network, DNN, is trained on a limited number of examples, while the ensemble of neural networks, DNN, consists of five separate neural networks trained on the same examples (patterns). The ensemble approach aims to increase the robustness and generalization ability of the surrogate model;
Sorting or identifying natural frequencies: The natural frequencies obtained from the finite element simulations can be sorted in two ways, namely in ascending order or according to the corresponding vibration mode shape. The latter approach groups the natural frequencies based on the mode shapes they represent. The mode shapes provide valuable information about the structural behavior, which can be useful in certain optimization scenarios;
Necessary number of FE calls: The number of FE calls is pivotal from a computational burden standpoint. Estimating the minimum yet essential number of FE calls is crucial to optimize the computational load.
For each configuration, the optimization was performed with two objectives: minimizing the cost of materials and either maximizing the fundamental natural frequency () or maximizing the bandwidth around specific frequencies (50, 60, 70, or 80 Hz) free from any natural frequency.
Five training sets were created to assess the impact of the number of patterns necessary to train the surrogate models, each with a different number of elements. The surrogate models trained using their sets were denoted as Vx, where x indicates the number of thousands of elements in the learning set (e.g., V05 corresponds to 500 elements, V1 to 1000 elements, V2 to 2000 elements, and so on).
To assess the quality of the Pareto fronts obtained during optimization, indicators requiring the use of TPF were used. Since there is no possibility to obtain the TPF (derive analytically or obtain by any other method) in the considered task, its role throughout the work is the envelope of all Pareto fronts obtained for the given problem by all methods described in the work.
The main goal of the analysis was to find the optimal combination of surrogate model configuration and learning set size that ensures accurate and efficient optimization results. The trade-off between computational effort and optimization performance was carefully evaluated, considering the quality of the obtained Pareto fronts and the convergence speed of the optimization process.
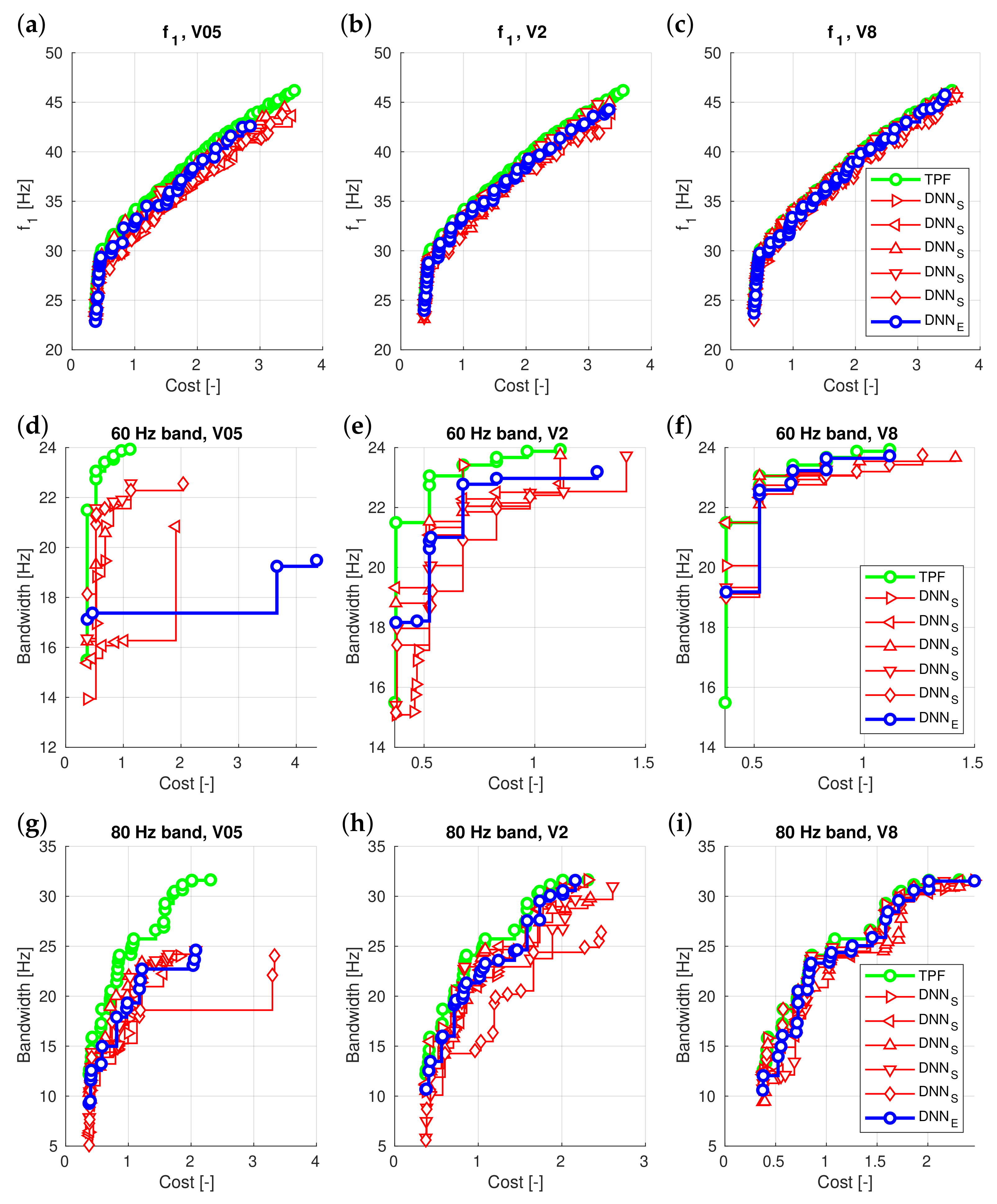
4.2. Surrogate Model Being a Single Network or an Ensemble of Five Networks
The first step of the analysis focused on comparing the results obtained from a single surrogate model, DNN, with those obtained from network ensembles, DNN. To conduct this comparison, five DNN surrogate models were created, each trained using the same set of examples. The optimization was performed with two objectives: maximizing the fundamental natural frequency () or maximizing the frequency bandwidth, both with cost minimization.
The results obtained from different DNN
surrogate models and DNN
ensembles are presented in
Figure 5 (for the convenience of the reader, the data presented in these charts are in their original form, without scaling or normalization). For the Pareto fronts shown in
Figure 5, various Pareto front indicators were calculated.
Table 2 shows the values of indicators calculated for Pareto fronts obtained from different optimization approaches in the V05 learning set size case. Additionally, the table’s last row presents the data condensed, indicating the number of cases where DNN
performed better than DNN
.
While it is straightforward to select the best-performing DNN
surrogate model based on the results in
Table 2, doing so requires running a series of FE verification for each individual surrogate model, significantly increasing the computational effort. To avoid this problem, DNN
network ensembles were introduced.
With the network ensemble approach, the calculation of the objective function, or , is modified. At first, five values are calculated using the five single surrogate models, and the final value is chosen as the best among them. The finite element verification is then performed only once, leading to significant computational savings.
The results presented in
Table 3 demonstrate that the network ensembles effectively fulfill their intended task. Among the five models built on individual networks, the ensemble accurately selects the values to avoid the worst-case scenario. The average value from the data in the table does not exceed 1.6, with a median value of 1.
The findings indicate that using DNN
ensembles successfully avoids the weakest model without the need to verify all individual models. While ensembles may not yield the absolute best results (see
Figure 5), their purpose is to prevent obtaining the worst results and provide a reasonable trade-off between computational efficiency and optimization accuracy.
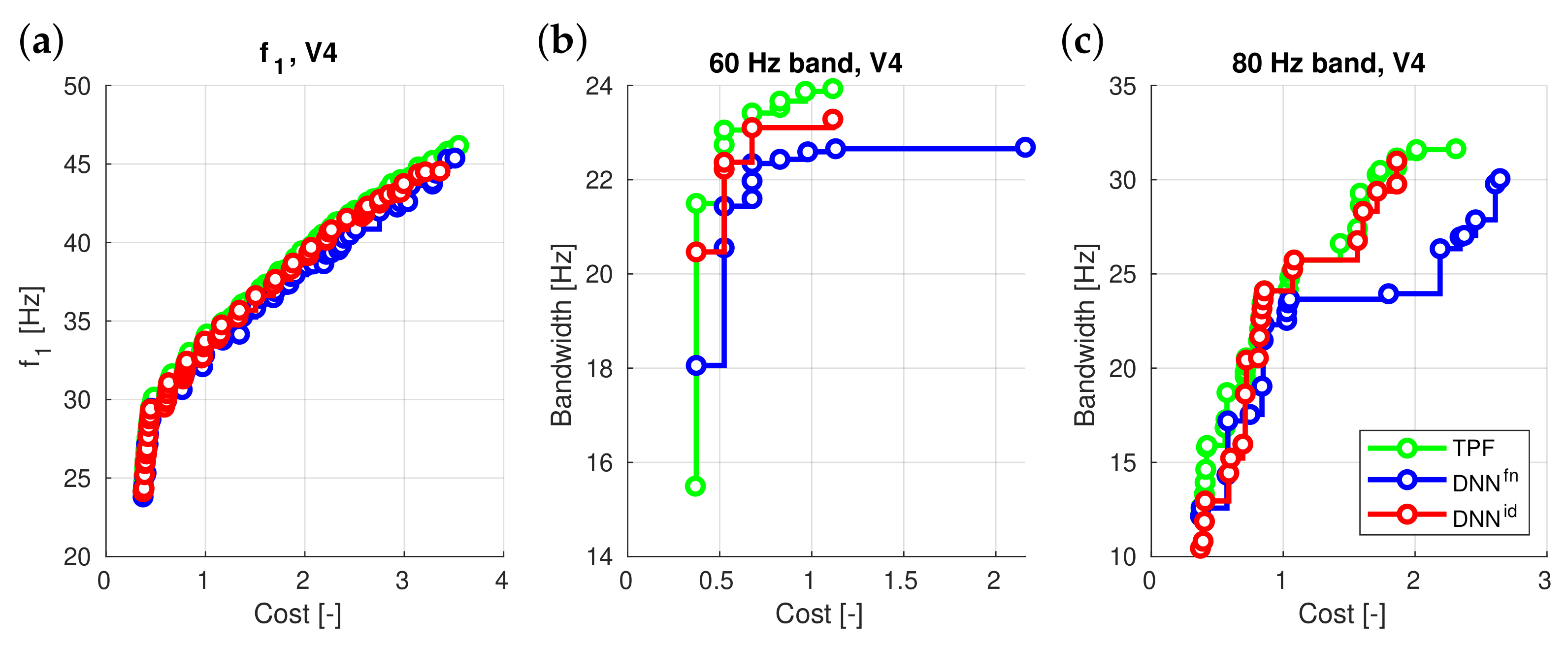
4.3. Surrogate Model Based on Identified Mode Shapes
In a previous study by the authors [
23,
24,
25], it was demonstrated that incorporating mode shapes identification and analyzing natural frequencies with reference to the corresponding mode shapes leads to an improvement in the accuracy of the surrogate model and the overall optimization process. In the current research, this aspect was reevaluated, but this time, the focus was broadened to network ensembles, four different frequency bands, and fundamental natural frequency
. Moreover, multi-objective optimization was applied where besides the optimization of dynamic parameters also the cost of the structure has been taken into account.
Thus, the second issue examined was a comparison of the results obtained from two types of surrogate models: one working with identified mode shapes (DNN
) and the other with increasing values of natural frequencies without mode shape identification (DNN
). The results are presented in
Table 4 and in
Figure 6.
Upon analyzing the results in the table, it becomes evident that surrogate models based on natural frequencies assigned to identified mode shapes of vibration exhibit clear advantages in most situations. This outcome highlights the importance of incorporating mode shape identification in the analysis of natural frequencies, as it leads to more accurate results and better optimization performance in the majority of cases.
Based on the results presented in the table, it is evident that mode shape identification plays an important role in enhancing the performance of the surrogate model in optimization.
4.4. The Influence of the Number of Patterns on the Optimization Accuracy
A wide range of simulations was conducted, covering five different optimization problems, each defined by two objective functions. In all cases, one common objective function was minimizing material costs. The second objective function allowed for the maximization of either:
The fundamental natural frequency;
The bandwidth around an arbitrarily chosen frequency, ensuring it was free from any natural frequencies of the shell.
Additionally, in each of the five described optimization problems, a surrogate model was applied, constructed from five neural networks (network ensemble), and trained with varying numbers of training samples (ranging from 500 to 8000 patterns). The number of FE calls used in each case was precisely calculated (including FE calls for verification of the obtained results), as one of the objectives of the proposed procedure was to minimize the number of FE calls.
The results obtained from the optimization procedures using the neural surrogate models were compared with the results from the classical random Monte Carlo approach.
Table 5 and
Figure 7 present the results obtained in the maximization of
with simultaneous cost minimization.
Table 6 and
Figure 8 present the complete results of maximizing the width of four frequency bands, combined with cost minimization.
All the data presented in
Table 5 and
Table 6 and
Figure 7 and
Figure 8 indisputably demonstrate the significant advantage of using the GA for optimization over the random Monte Carlo method. This observation is consistent with expectations, but it is worth noting that a tenfold increase in the number of FE calls does not confer any advantage to the Monte Carlo method. The optimization approach proposed in this paper exhibits remarkable efficiency.
In all analyzed cases, a significant improvement in results was evident with an increase in the number of patterns used to train the surrogate models, up to a value of about 2000 patterns (case V2). Subsequently, the improvement in results became marginal, and in some instances, stagnation or even regression was observed. These findings suggest that the optimal number of patterns is 4000 (case V4)—for each of the analyzed cases, V4 consistently yielded either the best Pareto front indicator values or values close to the best. Further doubling the number of patterns to 8000 (V8) no longer resulted in significant improvement, and in certain cases, regression was observed.
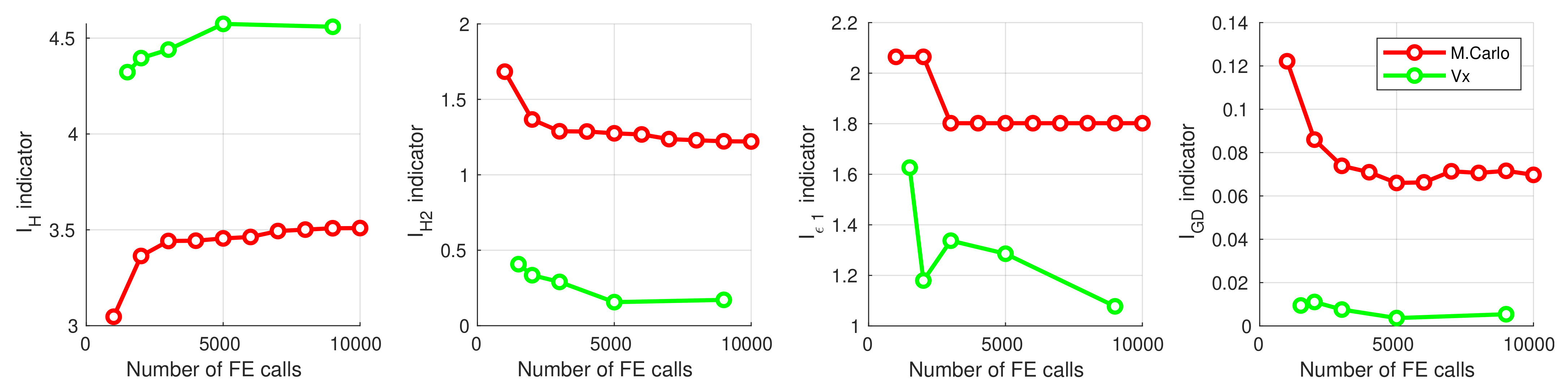
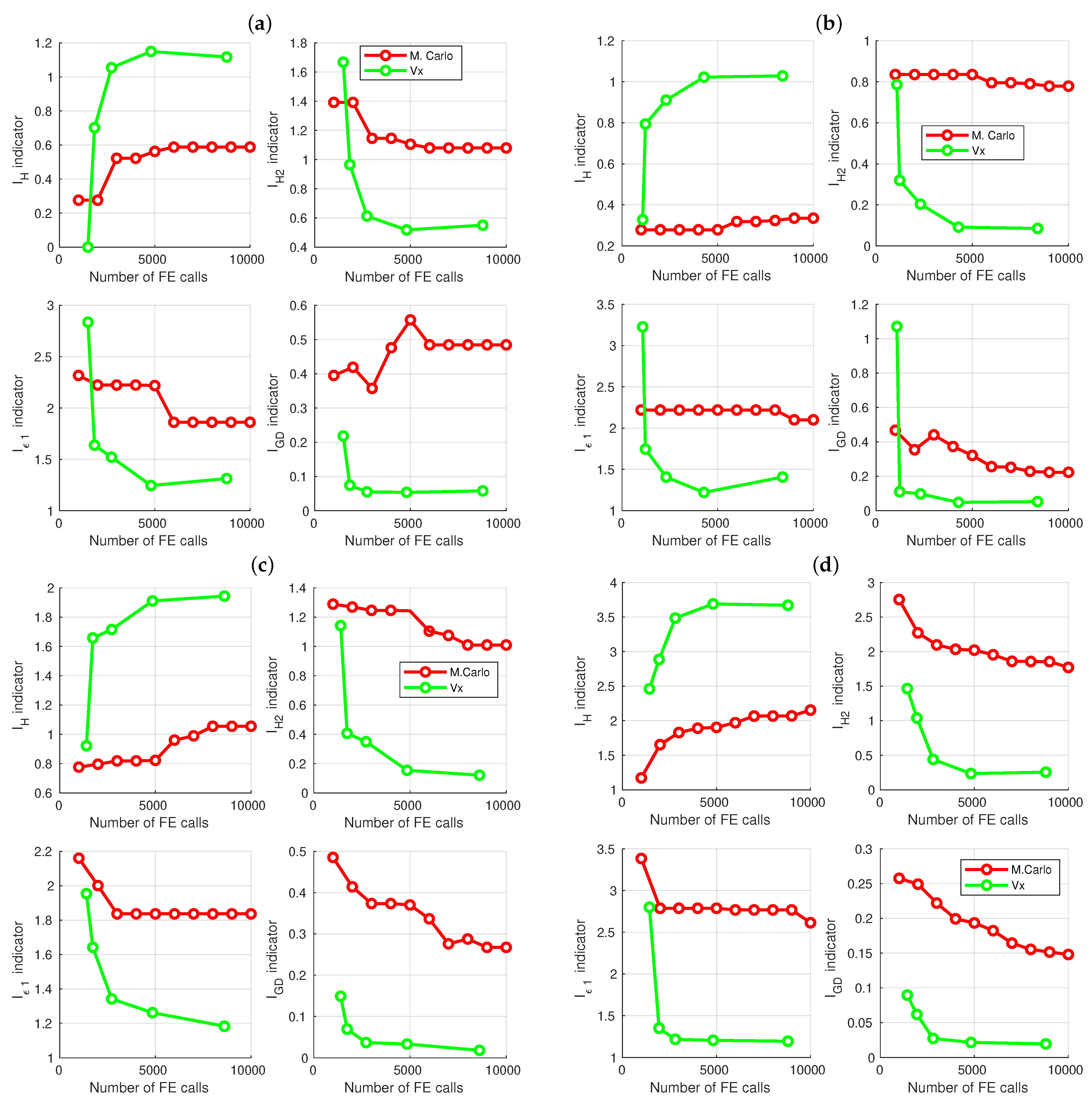
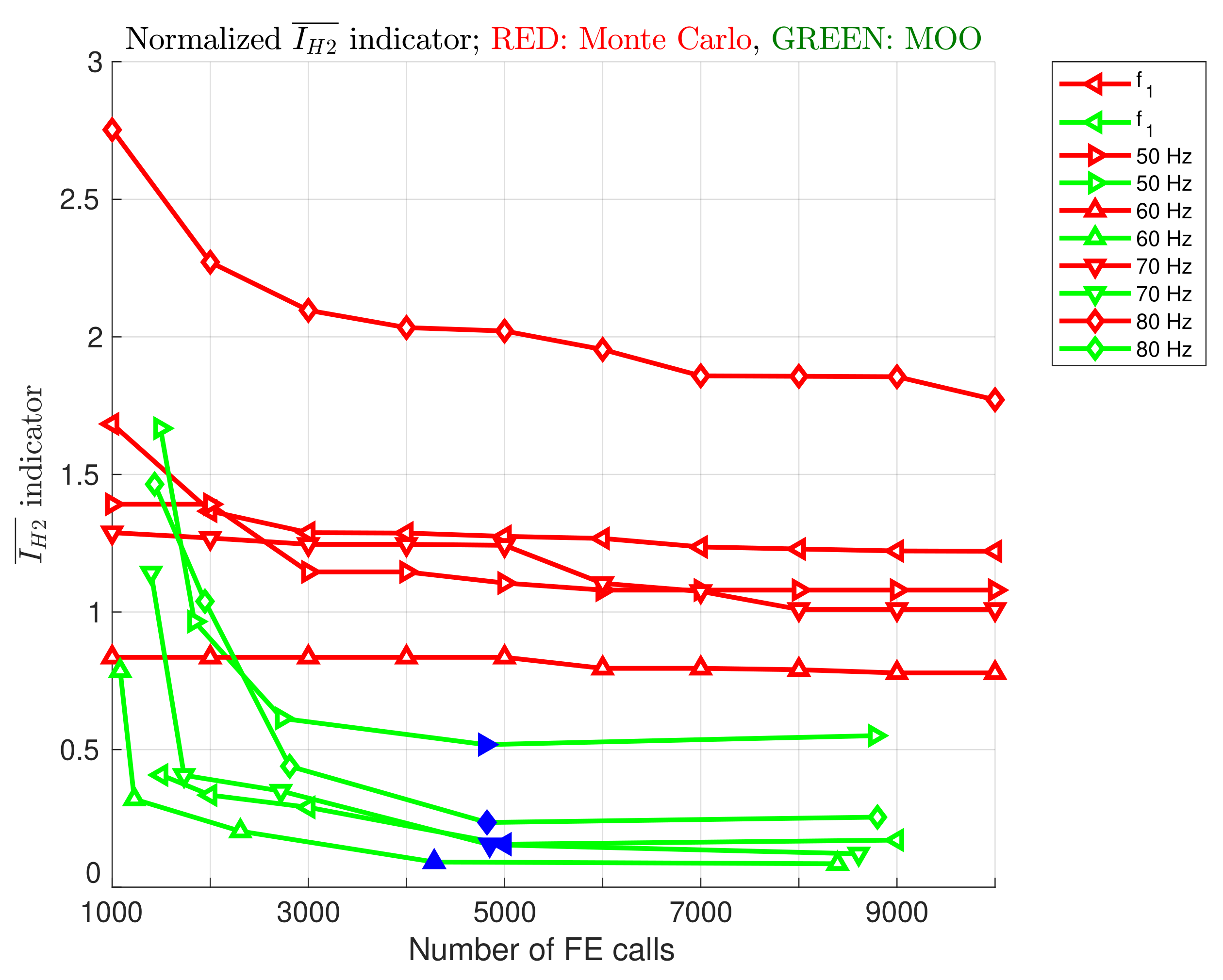
The next figure,
Figure 9, also shows an analysis of the quality of Pareto fronts obtained with different numbers of FE calls, but this time the normalized index
was used to assess the quality of Pareto fronts. This approach made it possible to present the results obtained in different cases on a single chart. The value of
indicator for a front named A is obtained according to the following formula:
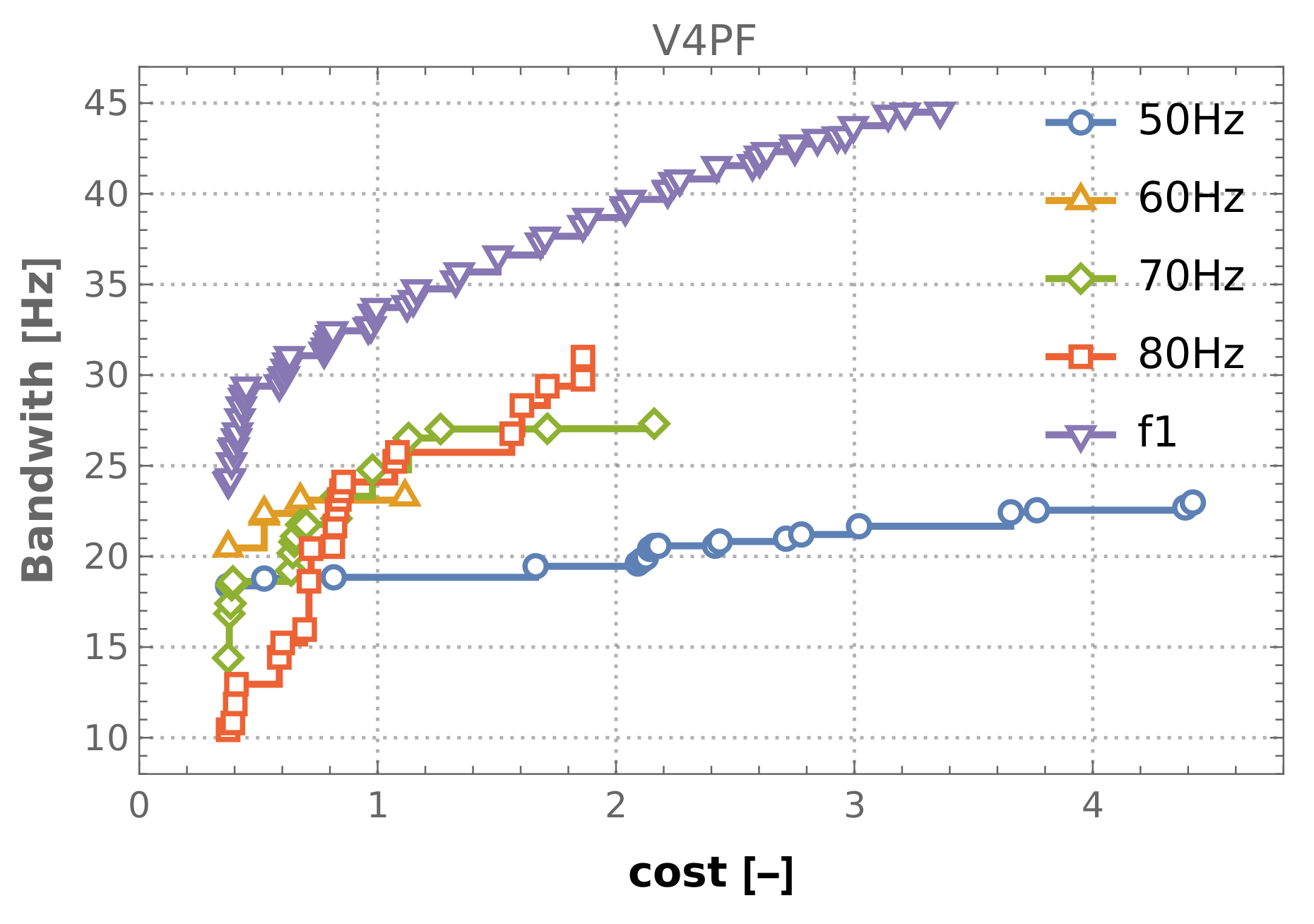
The results obtained from the V4 optimization case are highlighted in
Figure 9 in blue. It is clear that no further improvement is observed in the V8 case. All Pareto fronts obtained from the V4 case, for all considered optimization cases (both
maximization and four frequency bands width maximization), are collected in
Figure 10. The maximal values of
or bandwidths (coordinates of the right end of each Pareto front) obtained from the V4 case are collected in
Table 7. It should be emphasized that the values given in the table cannot be regarded as the best solutions to optimization problems. They are only indications of what the largest values of
and the widths of the intervals are found when performing optimization tasks.
6. Summary of Main Research Findings
The effectiveness of single neural network surrogate models (DNN
) was compared to network ensembles (DNN
), each consisting of five neural networks. The goal was to ascertain which approach provided more reliable results. Although individual DNN
models showed varying performance, DNN
ensembles proved effective in selecting the best outcome without the need for extensive verification (
Table 3). The ensemble approach strikingly mitigated the risk of suboptimal results by combining the strengths of multiple networks.
The impact of mode shape identification on surrogate models was reevaluated, comparing identified mode shapes (DNN
) with sorted natural frequencies (DNN
). Results consistently favored the mode shape-based approach (
Table 4,
Figure 6), underlining the importance of incorporating mode shape information to enhance surrogate model accuracy.
The influence of the number of training patterns on optimization efficiency was analyzed across five optimization problems. Surrogate models trained with approximately 4000 patterns (V4) showed optimal performance, with diminishing returns observed beyond this point. The proposed method vastly outperformed the Monte Carlo approach, affirming its computational efficiency and robustness.
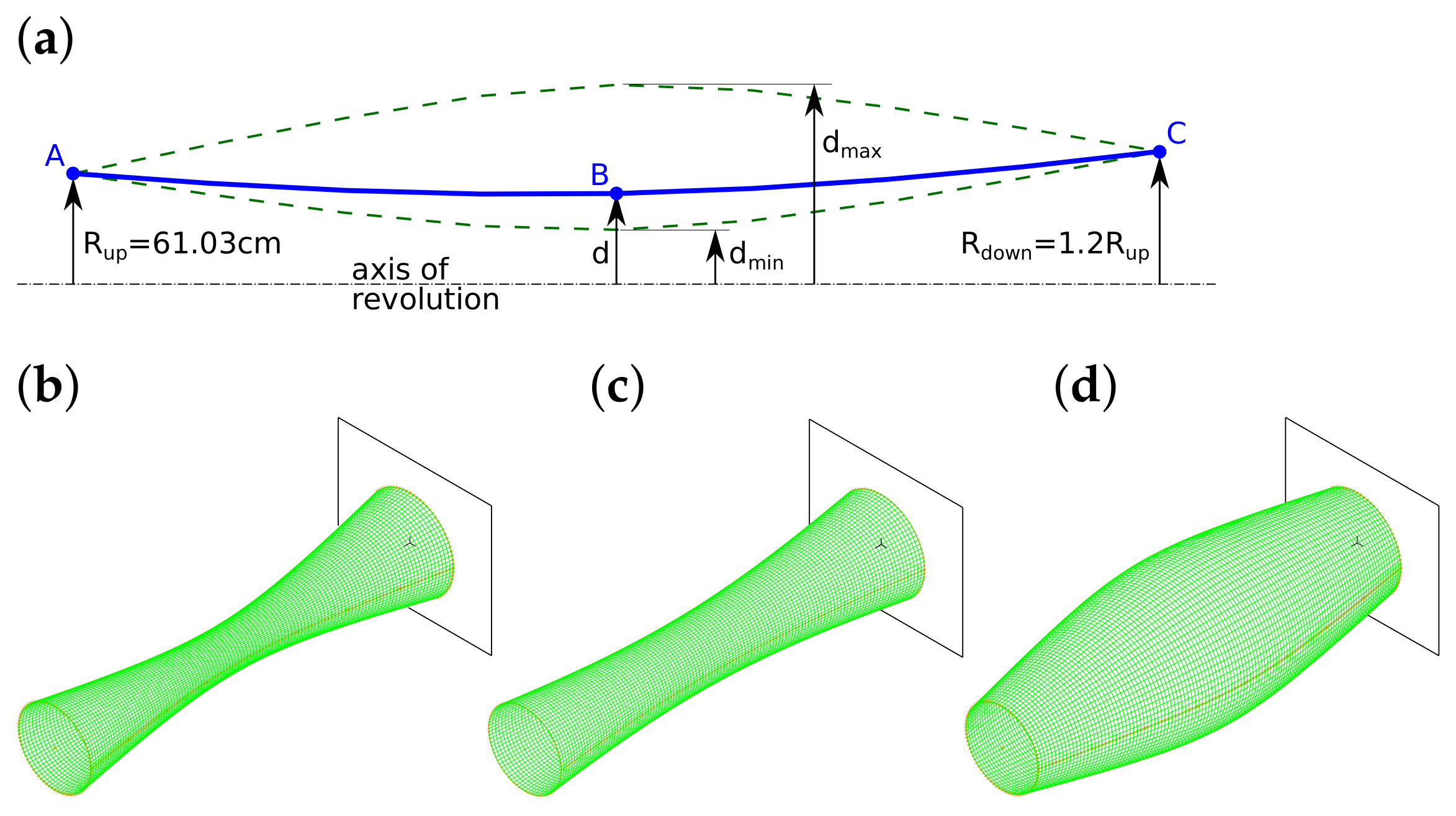
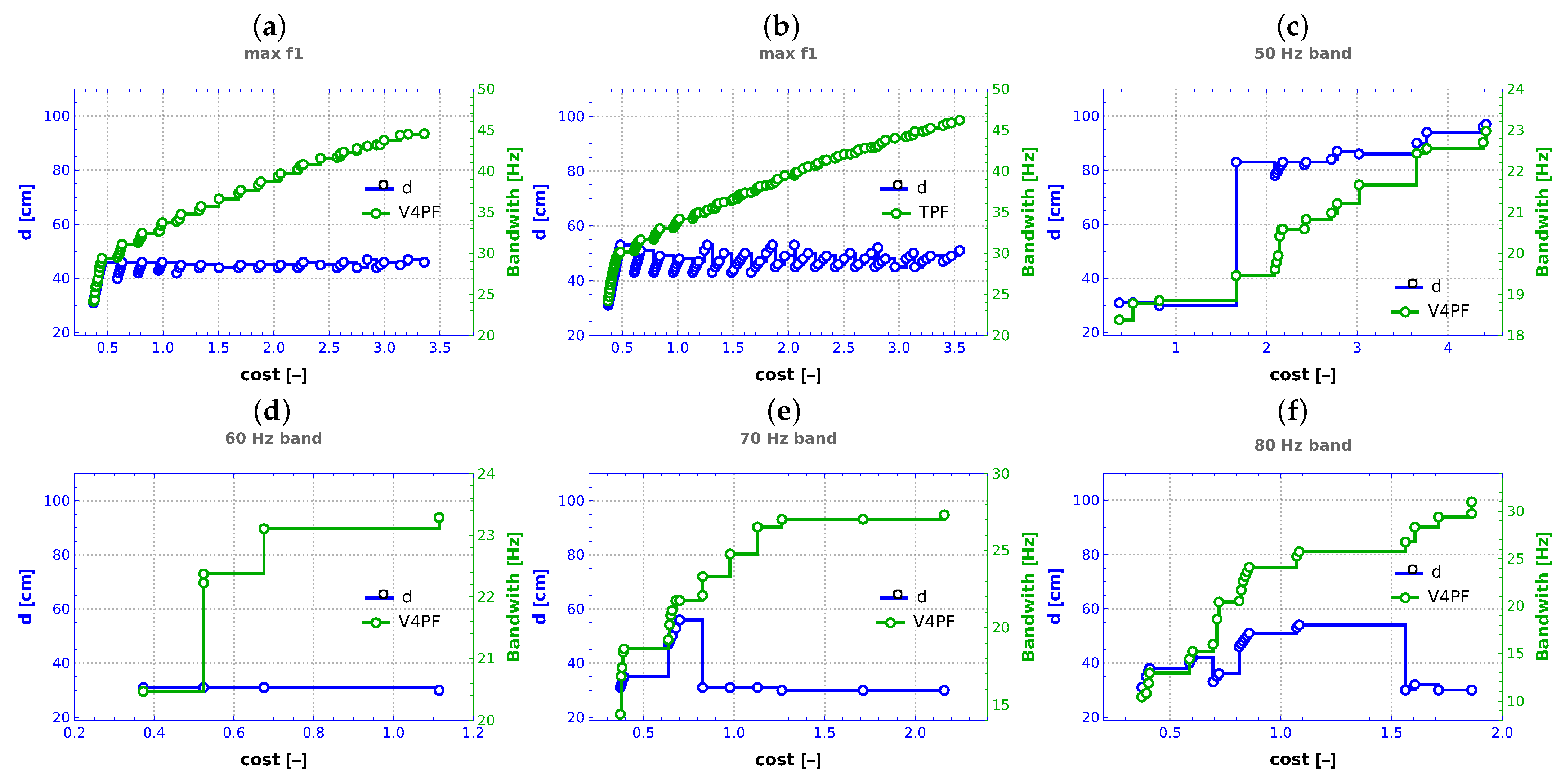
The parameter
d, representing the structure’s depth, played a pivotal role in the optimization process. Depending on the objective, such as maximizing the fundamental natural frequency (
),
d consistently favored a certain value. Modeled as a slightly concave hyperboloid, this configuration ensured maximum
(
Figure 11).
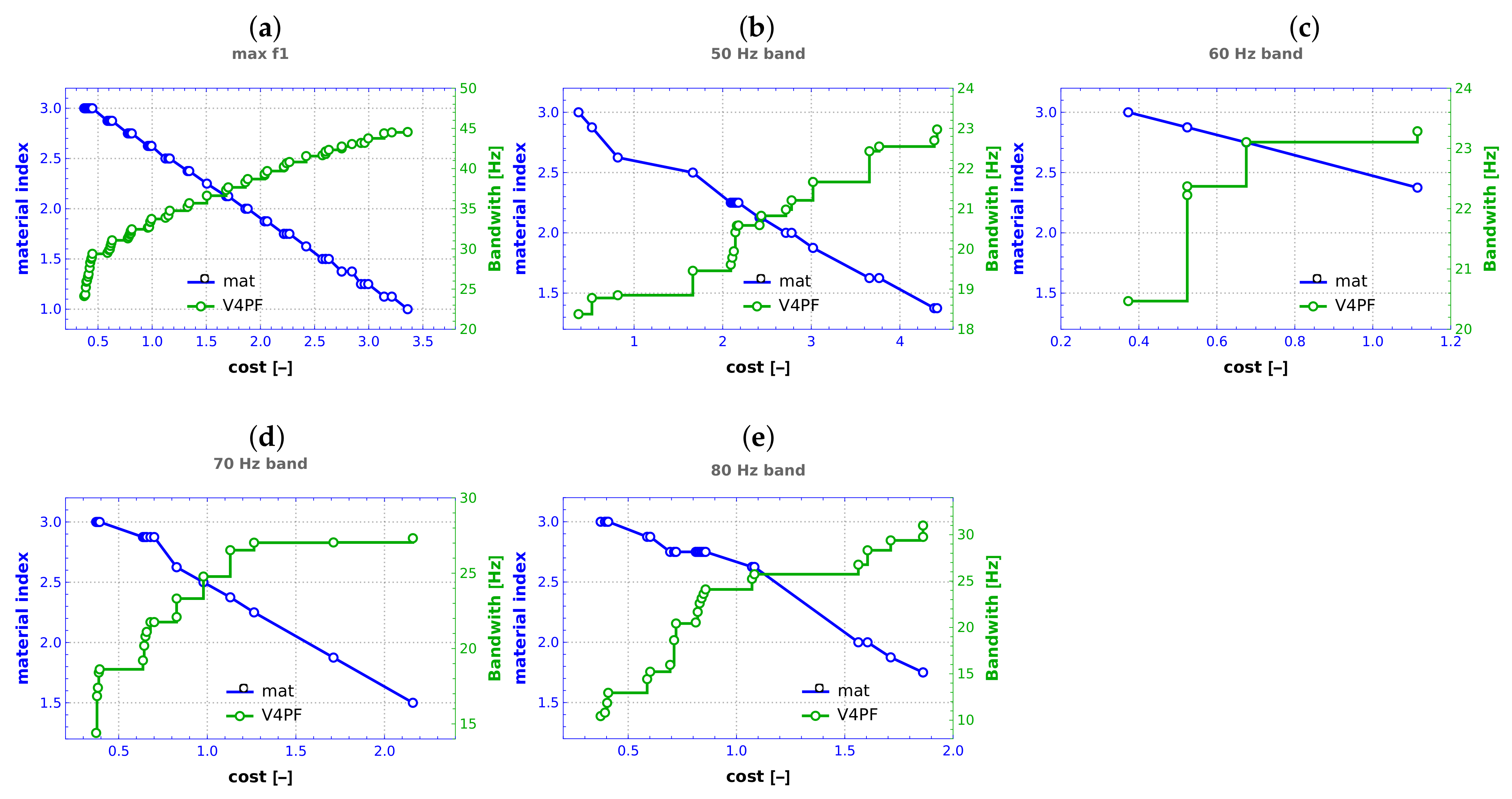
The material index (
) was introduced to characterize material composition choices. For
maximization, a correlation between cost and material index was observed, ranging from cost-effective to high-cost scenarios. In contrast, bandwidth optimization resulted in solutions clustering around economical materials, highlighting the optimization’s economic efficiency (
Figure 12).
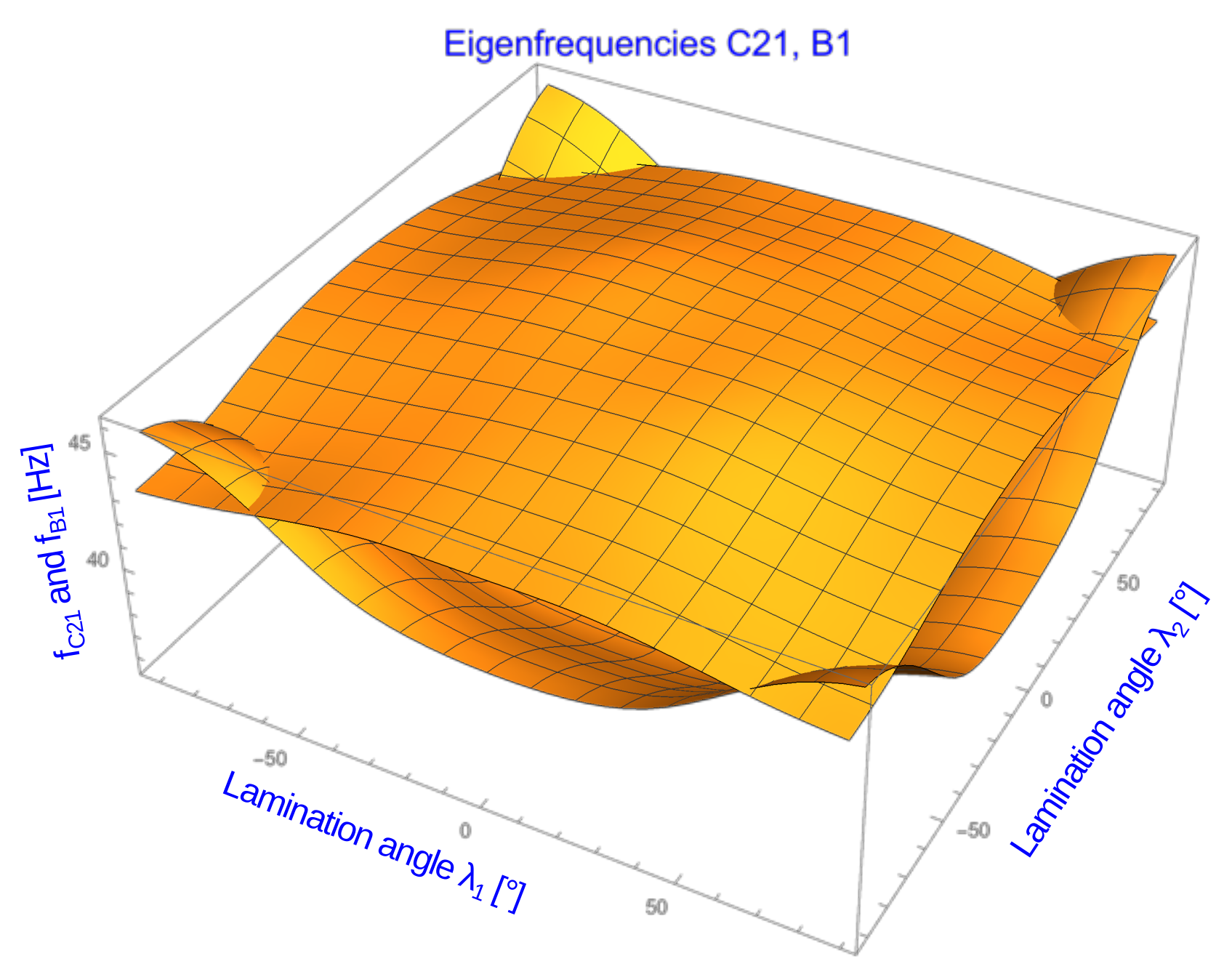
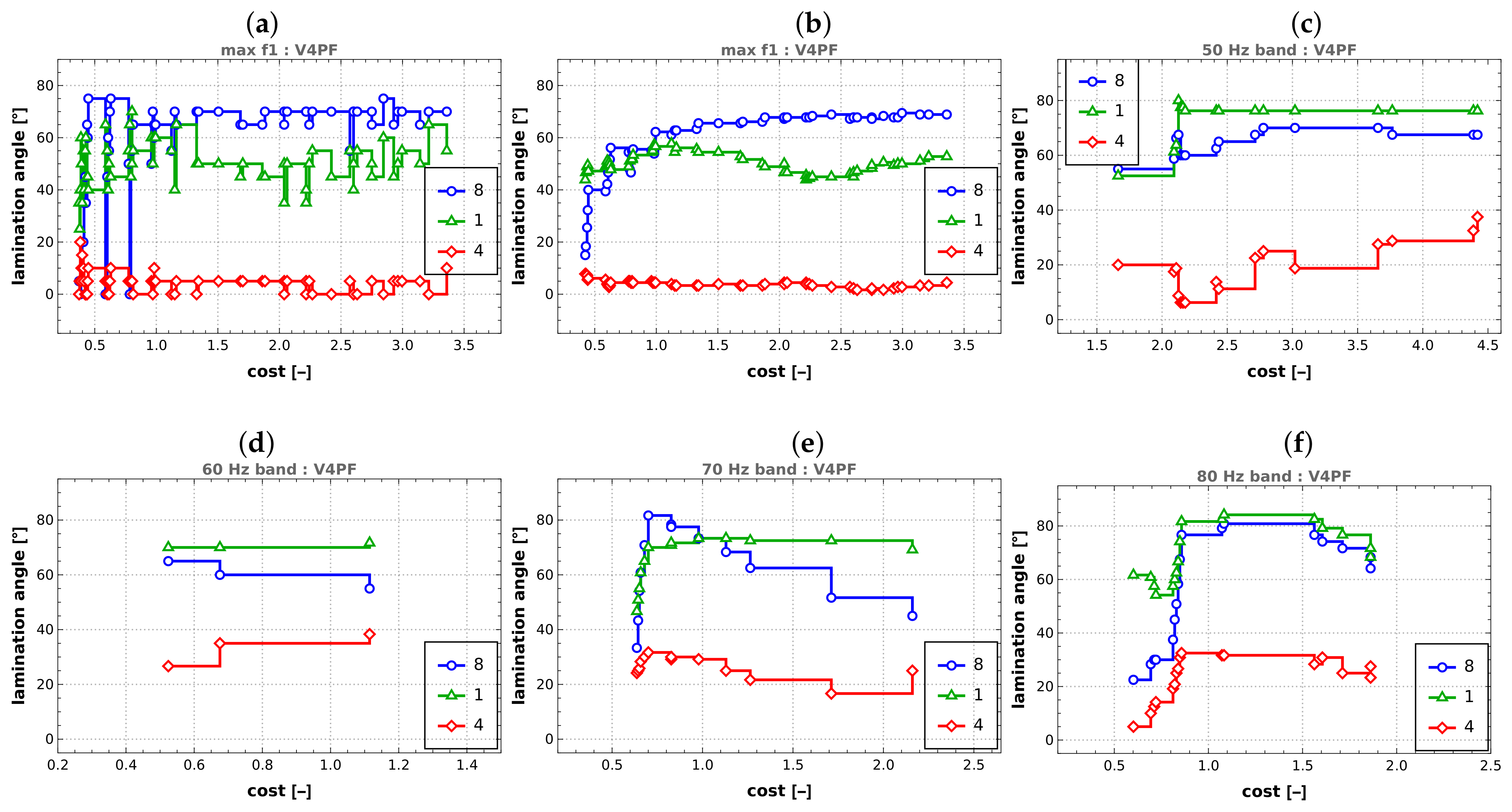
The analysis of lamination angles revealed intricate trends. Lamination angles for inner and outer layers approached 70 and 50 degrees, respectively, with increasing cost, while middle layers tended towards near-zero angles. This nuanced behavior underscores the intricate interplay between material composition and geometric configuration.
In conclusion, the optimization process demonstrated the efficacy of ensemble surrogate models, the significance of mode shape identification, and the efficient trade-off between computational effort and optimization performance. The parameter d, material composition, and lamination angles intricately influenced optimization outcomes. The approach showcases potential for various engineering applications, offering a comprehensive framework for efficient and accurate optimization.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}