

Auxetic Behaviour of Rigid Connected Squares

Abstract
:
1. Introduction
2. Analysis of the Rotating Squares Structure
3. A Study of Planar Constructions Made of Auxetic Structures
4. Studies of the Deformation Mechanism of the Structure in Compression
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Czajkowski, M.; Coulais, C.; van Hecke, M.; Rocklin, D.Z. Conformal elasticity of mechanism-based metamaterials. Nat. Commun. 2022, 13, 211. [Google Scholar] [CrossRef]
- Pothier, S.; Roufail, R.; Malton, M. Unit Cell Modelling of Auxetic Structure. J. Miner. Mater. Charact. Eng. 2022, 10, 360–369. [Google Scholar] [CrossRef]
- Mizzi, L.; Mahdi, E.; Titov, K.; Gatt, R.; Attard, D.; Evans, K.E.; Grima, J.N.; Tan, J.-C. Mechanical metamaterials with star-shaped pores exhibiting negative and zero Poisson’s ratio. Mater. Des. 2018, 146, 28–37. [Google Scholar] [CrossRef]
- Walker, A.; Stankovic, T. Algorithmic design of origami mechanisms and tessellations. Commun. Mater. 2022, 3, 4. [Google Scholar] [CrossRef]
- Wickeler, A.L.; Naguib, H.E. Novel origami-inspired metamaterials: Design, mechanical testing and finite element modelling. Mater. Design 2020, 186, 108242. [Google Scholar] [CrossRef]
- Roth, A.; Ganzenmüller, G.; Gutmann, F.; Jakkula, P.; Hild, F.; Pfaff, A.; Yin, K.; Eberl, C.; Hiermaier, S. 2D Numerical Simulation of Auxetic Metamaterials Based on Force and Deformation Consistency. Materials 2022, 15, 4490. [Google Scholar] [CrossRef]
- Sangsefidi, A.R.; Dibajian, S.H.; Kadkhodapour, J.; Anaraki, A.P.; Schmauder, S.; Schneider, Y. An Abaqus plugin for evaluation of the Auxetic structure performance. Eng. Comput. 2022, 38 (Suppl. S2), 1681–1704. [Google Scholar] [CrossRef]
- Lincoln, R.L.; Scarpa, F.; Ting, V.P.; Trask, R.S. Multifunctional composites: A metamaterial perspective. Multifunct. Mater. 2019, 2, 043001. [Google Scholar] [CrossRef]
- Masters, I.G.; Evans, K.E. Models for the elastic deformation of honey comb. Comp. Struct. 1996, 35, 403–422. [Google Scholar] [CrossRef]
- Gibson, L.J.; Ashby, M.F.; Schajer, G.S.; Robertson, C.I. The mechanics of two-dimensional cellular materials. Proc. R. Soc. London Ser. A Math. Phys. Eng. Sci. 1982, 382, 25–42. [Google Scholar] [CrossRef]
- Smith, C.; Grima, J.; Evans, K. A novel mechanism for generating auxetic behaviour in reticulated foams: Missing rib foam model. Acta Mater. 2000, 48, 4349–4356. [Google Scholar] [CrossRef]
- Wojciechowski, K.W.; Alderson, A.; Grima, J.N.; Scarpa, F. Auxetics and Other Systems with “Negative” Characteristics. Phys. Status Solidi B 2020, 257, 2000496. [Google Scholar] [CrossRef]
- Attard, D.; Cauchi, R.; Gatt, R.; Grima-Cornish, J.N.; Grima, J.N. Smart Cellular Systems with Pressure Dependent Poisson’s Ratios. CMST 2020, 26, 37–45. [Google Scholar] [CrossRef]
- Janus-Michalska, M.; Jasińska, D.; Smardzewski, J. Comparison of Contact Stress Distribution for Foam Seat and Seat of Auxetic Spring Skeleton. Int. J. Appl. Mech. Eng. 2013, 18, 55–72. [Google Scholar] [CrossRef] [Green Version]
- Rocklin, D.Z.; Zhou, S.; Sun, K.; Mao, X. Transformable topological mechanical metamaterials. Nat. Commun. 2017, 8, 14201. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gao, J.; Xue, H.; Gao, L.; Luo, Z. Topology optimisation for auxetic metamaterials based on isogeometric analysis. Comput. Methods Appl. Mech. Eng. 2019, 352, 211–236. [Google Scholar] [CrossRef]
- Boopathi, B.; Ponniah, G.; Burela, R.G. Realising the impact and compressive strengths of an arrowhead auxetic structure inspired by topology optimization. Int. J. Adv. Eng. Sci. Appl. Math. 2020, 12, 211–217. [Google Scholar] [CrossRef]
- Wang, W.; Dai, S.; Zhao, W.; Wang, C.; Zhang, Z. Topology design and equivalent mechanical properties of a three-dimensional star-shaped auxetic structure. Proc. Inst. Mech. Eng. Part L J. Mater. Des. Appl. 2022, 236, 1108–1121. [Google Scholar] [CrossRef]
- Künstler, A. Wandelbare Faltkonstruktionen Aus Ebenen, Quasi-Starren Flächenelementen von Nicht Vernachlässigbarer Dicke. Ph.D. Thesis, RTWN Aachen University, Aachen, Germany, 2018. [Google Scholar] [CrossRef]
- Freiformbare Auxetische Leichtbaustrukturm, Die Rautenfaltstruktur (Karsten Pietsch Technischer Entwickler). 2017. Available online: https://www.raumprobe.com/de/material/freiformbare-auxetische-leichtbaustruktur-rautenfaltstruktur-%28rfs%29-holz--20339-01-8552 (accessed on 11 March 2023).
- Neue Nested Spirawave® Wellenfedern auf dem Markt. 2019. Available online: https://www.smalley.com/sites/default/files/pdf/Nested%20Launch%20Press%20Release_DE_FINAL.pdf/ (accessed on 11 March 2023).
- Castanie, B.; Bouvet, C.; Ginot, M. Review of composite sandwich structure in aeronautic applications. Compos. Part C Open Access 2020, 1, 100004. [Google Scholar] [CrossRef]
- Allen, H.G. Analysis and Design of Structural Sandwich Panels; Elsevier: Amsterdam, The Netherlands, 1969; Available online: https://www.sciencedirect.com/book/9780080128702/ (accessed on 10 May 2023).
- Arifurrahman, F.; Critchley, R.; Horsfall, I. Experimental and numerical study of auxetic sandwich panels on 160 grams of PE4 blast loading. J. Sandwich Struct. Mater. 2021, 23, 3902–3931. [Google Scholar] [CrossRef]
- Dharmasena, K.P.; Wadley, H.N.; Xue, Z.; Hutchinson, J.W. Mechanical response of metallic honeycomb sandwich panel structures to high-intensity dynamic loading. Int. J. Impact Eng. 2008, 35, 1063–1074. [Google Scholar] [CrossRef]
- Kucewicz, M.; Baranowski, P.; Małachowski, J.; Popławski, A.; Płatek, P. Modelling, and characterisation of 3D printed cellular structures. Mater. Des. 2018, 142, 177–189. [Google Scholar] [CrossRef]
- Xiong, J.; Du, Y.; Mousanezhad, D.; Asl, M.E.; Norato, J.; Vaziri, A. Sandwich Structures with Prismatic and Foam Cores: A Review. Adv. Eng. Mater. 2018, 21, 1800036. [Google Scholar] [CrossRef] [Green Version]
- Nath, S.D.; Nilufar, S. Performance Evaluation of Sandwich Structures Printed by Vat Photopolymerization. Polymers 2022, 14, 1513. [Google Scholar] [CrossRef]
- Lakes, R. Foam Structures with a Negative Poisson’s Ratio. Science 1987, 235, 1038–1040. [Google Scholar] [CrossRef]
- Jiang, W.; Ren, X.; Wang, S.L.; Zhang, X.G.; Zhang, X.Y.; Luo, C.; Xie, Y.M.; Scarpa, F.; Alderson, A.; Evans, K.E. Manufacturing, characteristics and applications of auxetic foams: A state-of-the-art review. Compos. Part B Eng. 2022, 235, 109733. [Google Scholar] [CrossRef]
- Auxetic Shoes by Wertel Oberfel. Available online: https://www.werteloberfell.com/ (accessed on 10 May 2023).
- Pro Stock Tennis. Available online: https://www.prostocktennis.com/products/head-pt339-2-auxetic-speed-2022-16x19/ (accessed on 10 May 2023).
- Meeusen, L.; Candidori, S.; Micoli, L.L.; Guidi, G.; Stanković, T.; Grazio, S. Auxetic structures used in kinesiology tapes can improve form fitting and personalisation. Sci. Rep. 2022, 12, 13509. [Google Scholar] [CrossRef]
- Alderson, A.; Alderson, K.L.; Chirima, G.; Ravirala, N.; Zied, K.M. The in-plane linear elastic constants andout-of-plane bending of 3-coordinated ligament andcylinder-ligament honeycombs. Compos. Sci. Technol. 2010, 70, 1034–1041. [Google Scholar] [CrossRef] [Green Version]
- Rasburn, J.; Mullarkey, P.G.; Evans, K.E.; Alderson, A.; Ameer-Beg, S.; Perrie, W. Auxetic structures for variable permeability systems. AIChE J. 2001, 47, 2623–2626. [Google Scholar] [CrossRef]
- Wallbanks, M.; Khan, M.F.; Bodaghi, M.; Triantaphyllou, A.; Serjouei, A. On the design workflow of auxetic metamaterials for structural applications. Smart Mater. Struct. 2022, 31, 023002. [Google Scholar] [CrossRef]
- Xue, Y.; Mu, J.; Huang, Y.; Zhou, L.; Shi, Z. Compressive mechanical properties of ex-situ auxetic composite-filled tubes. J. Mater. Res. Technol. 2021, 14, 1644–1654. [Google Scholar] [CrossRef]
- Li, T.; Liu, F.; Wang, L. Enhancing indentation and impact resistance in auxetic composite materials. Compos. Part B Eng. 2020, 198, 108229. [Google Scholar] [CrossRef]
- Huang, X.; Zhang, Z.; Wu, J. An overview of impact resistance of auxetic lattice structure. J. Phys. Conf. Ser. 2020, 1549, 032077. [Google Scholar] [CrossRef]
- Kim, J.; Mahato, M.; Oh, J.; Oh, I. Multi-Purpose Auxetic Foam with Honeycomb Concave Micropattern for Sound and Shock Energy Absorbers. Adv. Mater. Interfaces 2022, 10, 220209. [Google Scholar] [CrossRef]
- Melgarejo, A.D.; Ramírez, J.L.; Rubiano, A. Auxetic material in biomedical applications: A systematic review. Int. J. Electr. Comput. Eng. (IJECE) 2022, 12, 5880–5889. [Google Scholar] [CrossRef]
- Veerabagu, U.; Palza, H.; Quero, F. Review: Auxetic Polymer-Based Mechanical Metamaterials for Biomedical Applications. ACS Biomater. Sci. Eng. 2022, 8, 2798–2824. [Google Scholar] [CrossRef]
- Liu, W.; Wang, N.; Luo, T.; Lin, Z. In-plane dynamic crushing of re-entrant auxetic cellular structure. Mater. Des. 2016, 100, 84–91. [Google Scholar] [CrossRef]
- Chang, P.; Mei, H.; Tan, Y.; Zhao, Y.; Huang, W.; Cheng, L. A 3D-printed stretchable structural supercapacitor with active stretchability/flexibility and remarkable volumetric capacitance. J. Mater. Chem. A 2020, 8, 13646–13658. [Google Scholar] [CrossRef]
- Attard, D.; Casha, A.R.; Grima, J.N. Filtration Properties of Auxetics with Rotating Rigid Units. Materials 2018, 11, 725. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Liu, Z.; Matsuhisa, N.; Qi, D.; Leow, W.R.; Yang, H.; Yu, J.; Chen, G.; Liu, Y.; Wan, C.; et al. Auxetic Mechanical Metamaterials to Enhance Sensitivity of Stretchable Strain Sensors. Adv. Mater. 2018, 30, e1706589. [Google Scholar] [CrossRef] [PubMed]
- Ma, P.; Boakye, A.; Chang, Y.; Raji, R.K. A Review on Auxetic Textile Structures, Their Mechanism and Properties. J. Text. Sci. Fash. Technol. 2019, 2, 1–10. [Google Scholar] [CrossRef]
- Van Paepegem, W.; Palanivelu, S.; Degrieck, J.; Vantomme, J.; Reymen, B.; Kakogiannis, D.; Van Hemelrijck, D.; Wastiels, J. Blast performance of a sacrificial cladding with composite tubes for protection of civil engineering structures. Compos. Part B Eng. 2014, 65, 131–146. [Google Scholar] [CrossRef] [Green Version]
- Codina, R.; Ambrosini, D.; de Borbón, F. New sacrificial cladding system for the reduction of blast damage in reinforced concrete structures. Int. J. Protect. Struct. 2017, 8, 221–236. [Google Scholar] [CrossRef]
- Kalubadanage, D.; Remennikov, A.; Ngo, T.; Qi, C. Close-in blast resistance of large-scale auxetic re-entrant honeycomb sandwich panels. J. Sandw. Struct. Mater. 2020, 23, 4016–4053. [Google Scholar] [CrossRef]
- Wang, Z.; Zulifqar, A.; Hu, H. Auxetic composites in aerospace engineering. In Advanced Composite Materials for Aerospace Engineering; Woodhead Publishing: Sawston, UK, 2016; pp. 231–241. [Google Scholar]
- Duncan, O.; Shepherd, T.; Moroney, C.; Foster, L.; Venkatraman, P.D.; Winwood, K.; Allen, T.; Alderson, A. Review of Auxetic Materials for Sports Applications: Expanding Options in Comfort and Protection. Appl. Sci. 2018, 8, 941. [Google Scholar] [CrossRef] [Green Version]
- Grima, J.N.; Evans, K.E. Auxetic behavior from rotating squares. J. Mater. Sci. Lett. 2000, 19, 1563–1565. [Google Scholar] [CrossRef]
- Grima, J.N.; Farrugia, P.-S.; Gatt, R.; Zammit, V. Connected Triangles Exhibiting Negative Poisson’s Ratios and Negative Thermal Expansion. J. Phys. Soc. Jpn. 2007, 76, 2. [Google Scholar] [CrossRef]
- Attard, D.; Grima, J.N. Auxetic behaviour from rotating rhombi. Phys. Status Solidi (B) 2008, 245, 2395–2404. [Google Scholar] [CrossRef]
- Ai, L.; Gao, X.-L. Three-dimensional metamaterials with a negative Poisson’s ratio and a non-positive coefficient of thermal expansion. Int. J. Mech. Sci. 2018, 135, 101–113. [Google Scholar] [CrossRef]
- Plewa, J.; Płońska, M.; Lis, P. Investigation of Modified Auxetic Structures from Rigid Rotating Squares. Materials 2022, 15, 2848. [Google Scholar] [CrossRef]
- Plewa, J.; Płońska, M.; Feliksik, K. An Experimental Study of Auxetic Tubular Structures. Materials 2022, 15, 5245. [Google Scholar] [CrossRef] [PubMed]
- Lyngdoh, G.A.; Kelter, N.-K.; Doner, S.; Krishnan, N.A.; Das, S. Elucidating the auxetic behavior of cementitious cellular composites using finite element analysis and interpretable machine learning. Mater. Des. 2022, 213, 110341. [Google Scholar] [CrossRef]
- Coulais, C.; Kettenis, C.; van Hecke, M. A characteristic length scale causes anomalous size effects and boundary programmability in mechanical metamaterials. Nat. Phys. 2018, 14, 40–44. [Google Scholar] [CrossRef] [Green Version]
- Grima, J.N.; Gatt, R. Perforated Sheets Exhibiting Negative Poisson’s Ratios. Adv. Eng. Mater. 2010, 12, 460–464. [Google Scholar] [CrossRef]
- Ho, V.H.; Ho, D.T.; Kwon, S.-Y.; Kim, S.Y. Negative Poisson’s ratio in periodic porous graphene structures. Phys. Status Solidi (B) 2016, 253, 1303–1309. [Google Scholar] [CrossRef]
- Mizzi, L.; Attard, D.; Evans, K.E.; Gatt, R.; Grima, J.N. Auxetic mechanical metamaterials with diamond and elliptically shaped perforations. Acta Mech. 2021, 232, 779–791. [Google Scholar] [CrossRef]
- Taylor, M.; Francesconi, L.; Gerendás, M.; Shanian, A.; Carson, C.; Bertoldi, K. Low Porosity Metallic Periodic Structures with Negative Poisson’s Ratio. Adv. Mater. 2014, 26, 2365–2370. [Google Scholar] [CrossRef] [Green Version]
- Evans, K.E.; Alderson, A. Auxetic materials: Functional materials and structures from lateral thinking! Adv Mater. 2000, 12, 617–628. [Google Scholar] [CrossRef]
- Liu, Y.; Hu, H. A review on auxetic structures and polymeric materials. Sci. Res. Essays. 2010, 5, 1052–1063. [Google Scholar]
- Bhullar Sukhwinder, K. Three decades of auxetic polymers: A review. e-Polymers 2015, 15, 205–215. [Google Scholar] [CrossRef]
- Yang, W.; Li, Z.-M.; Shi, W.; Xie, B.-H.; Yang, M.-B. Review on auxetic materials. J. Mater. Sci. 2004, 39, 3269–3279. [Google Scholar] [CrossRef]
- Vaezi, M.; Seitz, H.; Yang, S. A review on 3D micro-additive manufacturing technologies. Int. J. Adv. Manuf. Technol. 2013, 67, 1721–1754. [Google Scholar] [CrossRef]
- Duncan, O.; Leslie, G.; Moyle, S.; Sawtel, D.; Allen, T. Fabrication of Auxetic Foam in a Pressure Vessel for Sports Applications. ISEA 2022—The Engineering of Sport 14, Purdue University. 6–10 June 2022. Available online: https://docs.lib.purdue.edu/cgi/viewcontent.cgi?article=1038&context=resec-isea (accessed on 10 May 2023).
- Goodridge, R.D.; Tuck, C.J.; Hague, R.J.M. Laser sintering of polyamides and other polymers. Prog. Mater. Sci. 2012, 57, 229–267. [Google Scholar] [CrossRef]
- Yu, X.; Zhou, J.; Liang, H.; Jiang, Z.; Wu, L. Mechanical metamaterials associated with stiffness, rigidity and compressibility: A brief review. Prog. Mater. Sci. 2018, 94, 114–173. [Google Scholar] [CrossRef]
- Wang, X.; Jiang, M.; Zhou, Z.W.; Gou, J.H.; Hui, D. 3D printing of polymer matrix composites: A review and prospective. Compos. Part B Eng. 2017, 110, 442–458. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
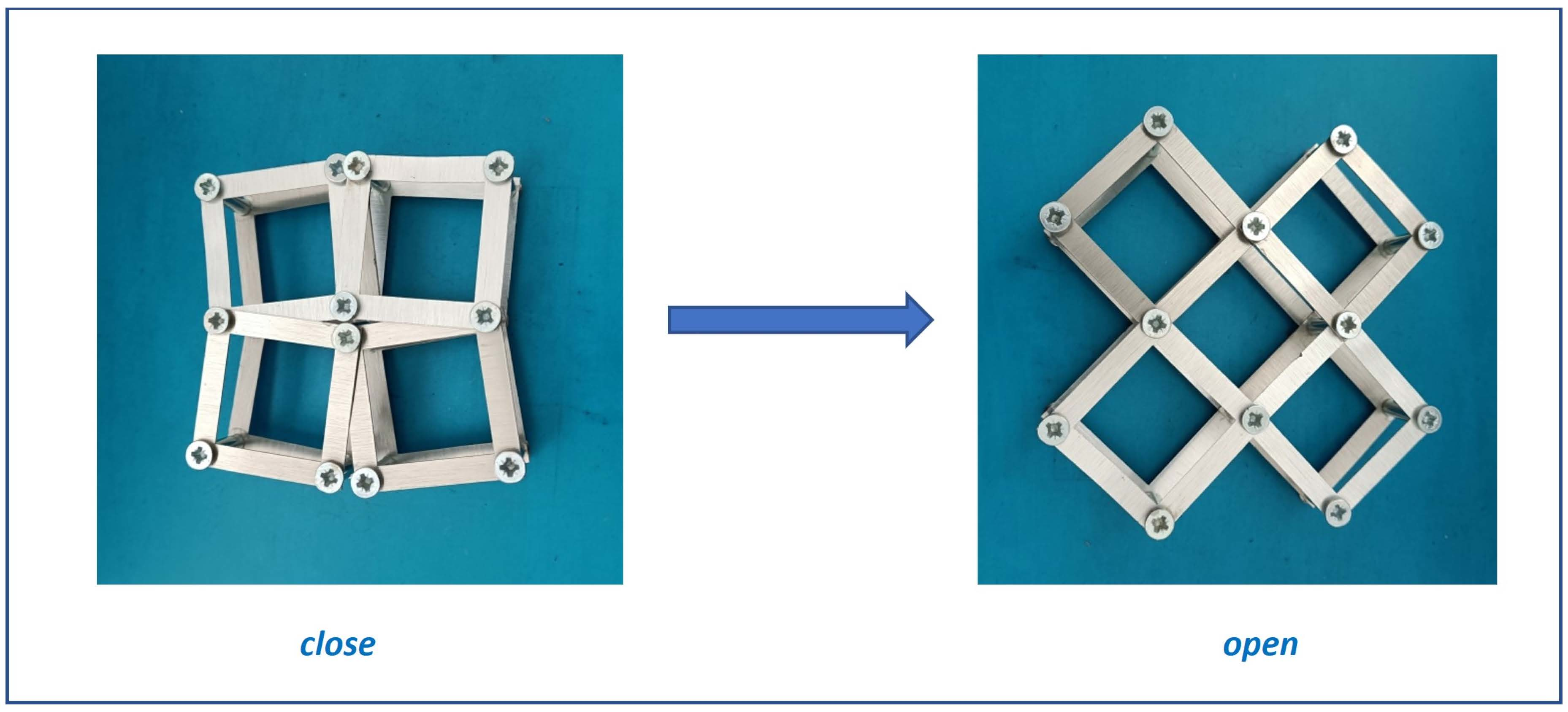
| closed | ||||
| open |
| Closed Position | Open Position |
|---|---|
| X1 = e + 4d + 2f + c lub X1 = 3e + 3c | X1 = 2c + 8d |
| X1 = c + 4d + 2f + e | X1 = 2c + 8d |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Plewa, J.; Płońska, M.; Junak, G. Auxetic Behaviour of Rigid Connected Squares. Materials 2023, 16, 5306. https://doi.org/10.3390/ma16155306
Plewa J, Płońska M, Junak G. Auxetic Behaviour of Rigid Connected Squares. Materials. 2023; 16(15):5306. https://doi.org/10.3390/ma16155306
Chicago/Turabian StylePlewa, Julian, Małgorzata Płońska, and Grzegorz Junak. 2023. "Auxetic Behaviour of Rigid Connected Squares" Materials 16, no. 15: 5306. https://doi.org/10.3390/ma16155306