
Anti-Skid Characteristics of Asphalt Pavement Based on Partial Tire Aquaplane Conditions




Abstract
:1. Introduction
2. Methodology
2.1. Construction of the Tire–Pavement Contact Model
2.1.1. Tire Modeling and Assembly with Pavement
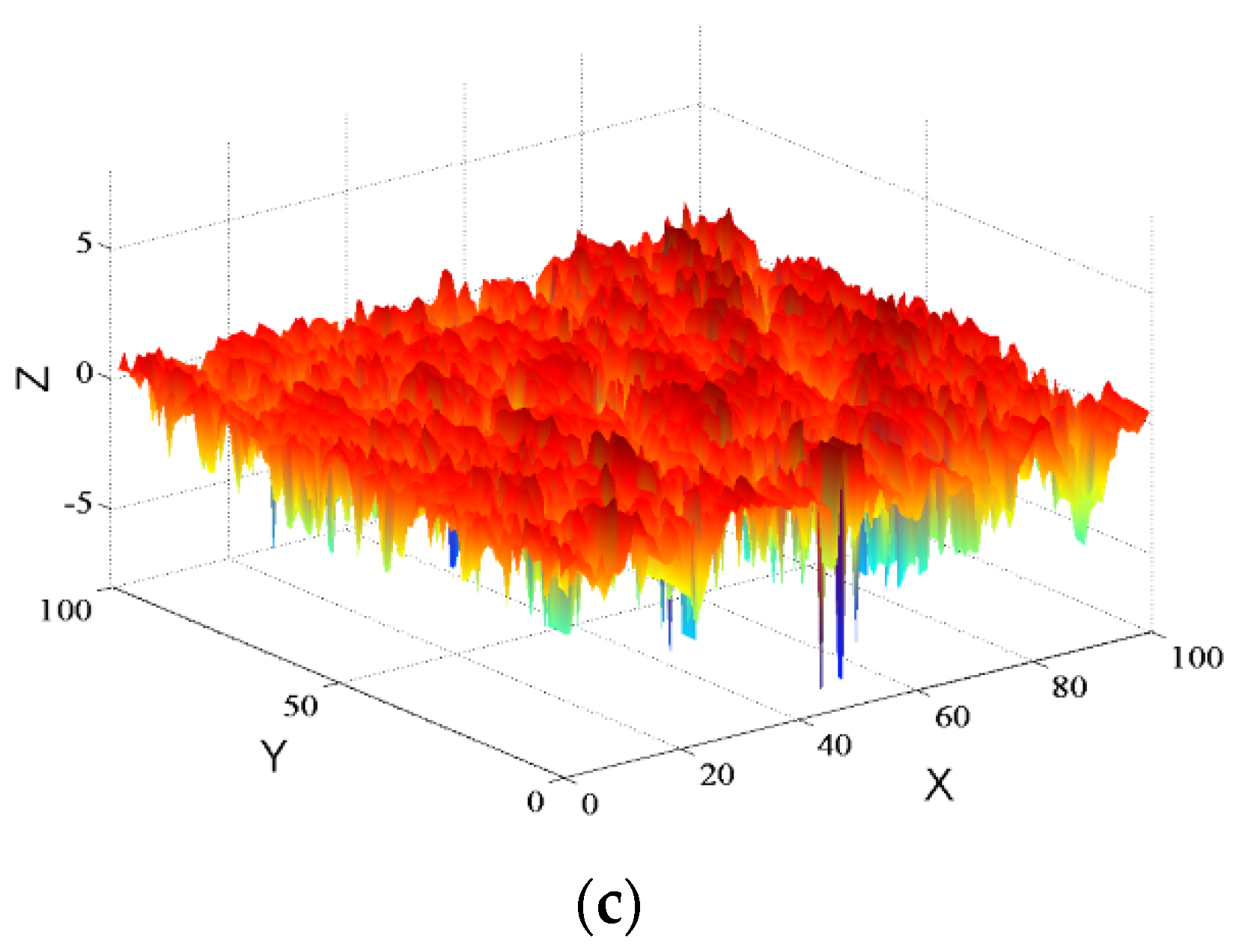
2.1.2. Acquisition of Pavement Texture Properties
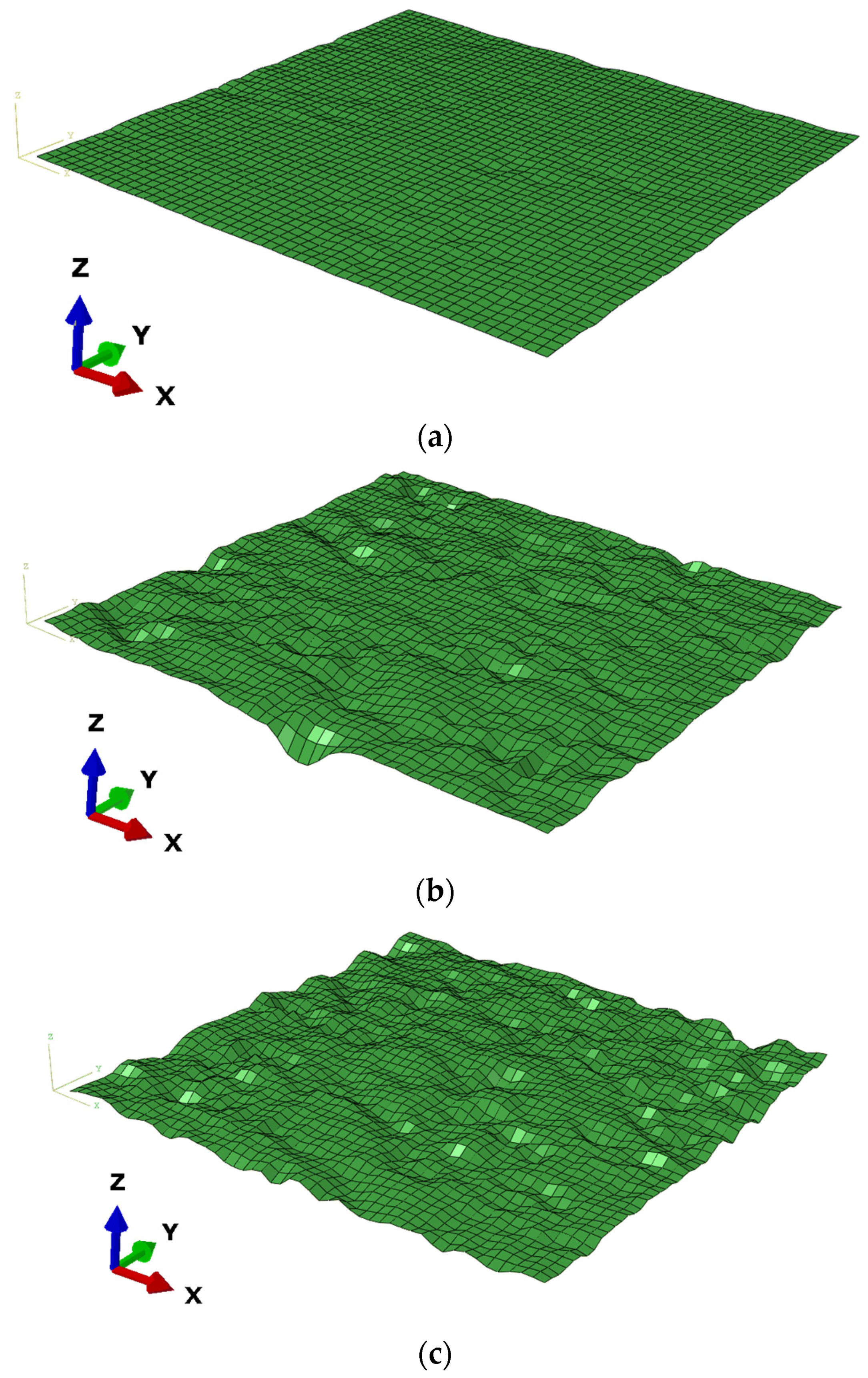
2.1.3. Modeling of Asphalt Pavement with Profile Textures
- (1)
- Pavement filtering and smoothing
- (2)
- Extension and amplification of pavement
- (3)
- Generation of the grid model
2.2. Steady Rolling Analysis of the Radial Tire
2.2.1. Modeling of Tire–Pavement Frictional Contact
- (1)
- Definition of rolling speed of the tire
2.2.2. Influencing Factors of Anti-Skid Performance of Asphalt Pavements
- (1)
- Effects of pavement texture on the frictional force of pavement
- (2)
- Effects of tire pressure on friction coefficient
- (3)
- Effects of loads on the friction coefficient
2.3. Finite Element Modeling of the Tire Aquaplane
2.3.1. Principle of CEL Method
2.3.2. Euler Grid Modeling Based on Flow Model
- (1)
- Selection of tire rolling model and flow model
- (2)
- Flow state equation
- (3)
- Construction of flow grid models
2.3.3. Tire Aquaplane Analysis Based on ABAQUS/Standard and Explicit
- (1)
- Implicit analysis
- (2)
- Explicit analysis
2.3.4. Validity Verification of Tire Aquaplane Finite Element Model
- (1)
- Flow trace verification
- (2)
- Vertical contact force
3. Results and Analysis
3.1. Effects of Asphalt Pavement Types on Partial Aquaplane Performanc
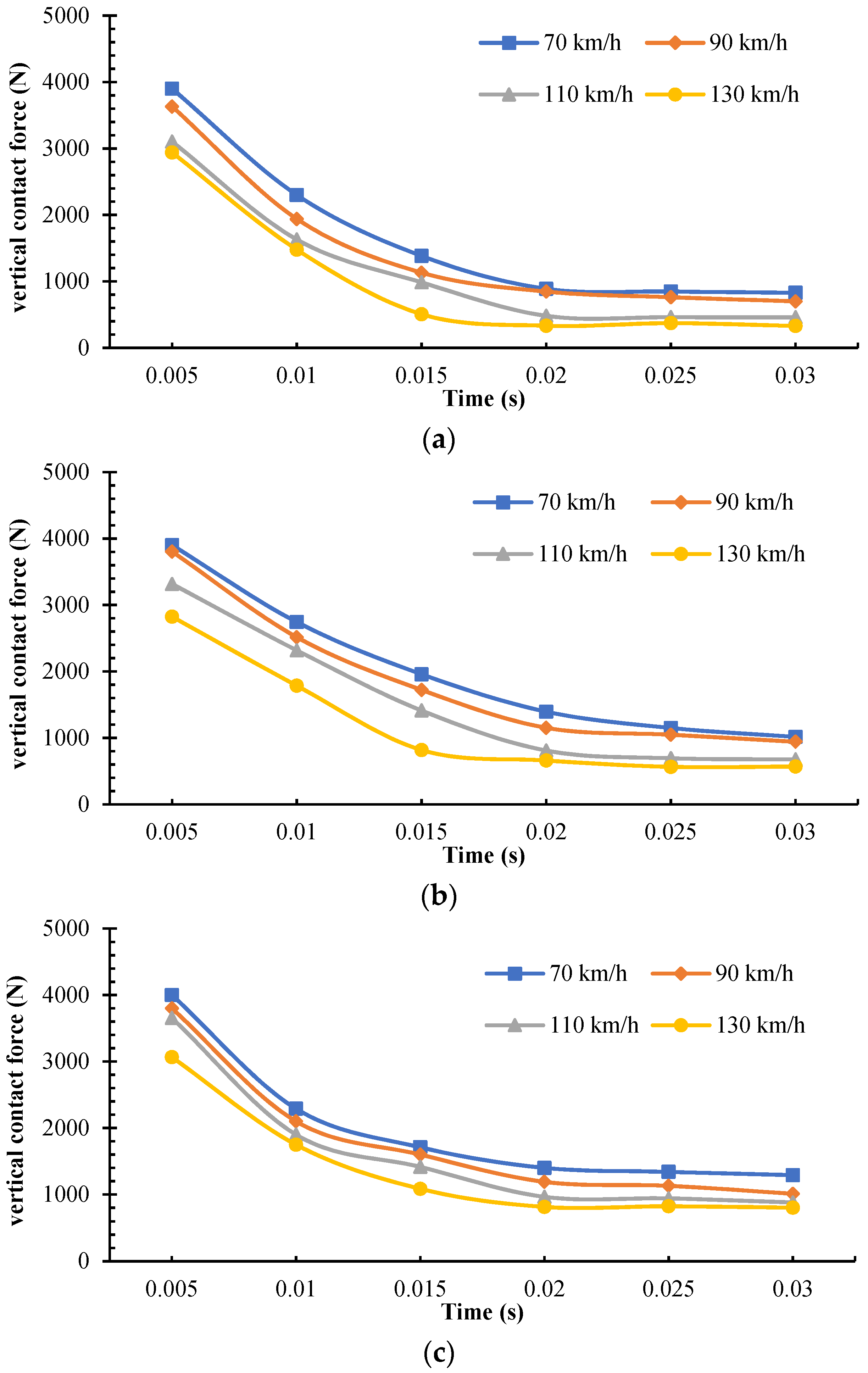
3.2. Effects of Tire Rolling Velocity on Partial Aquaplane Performance
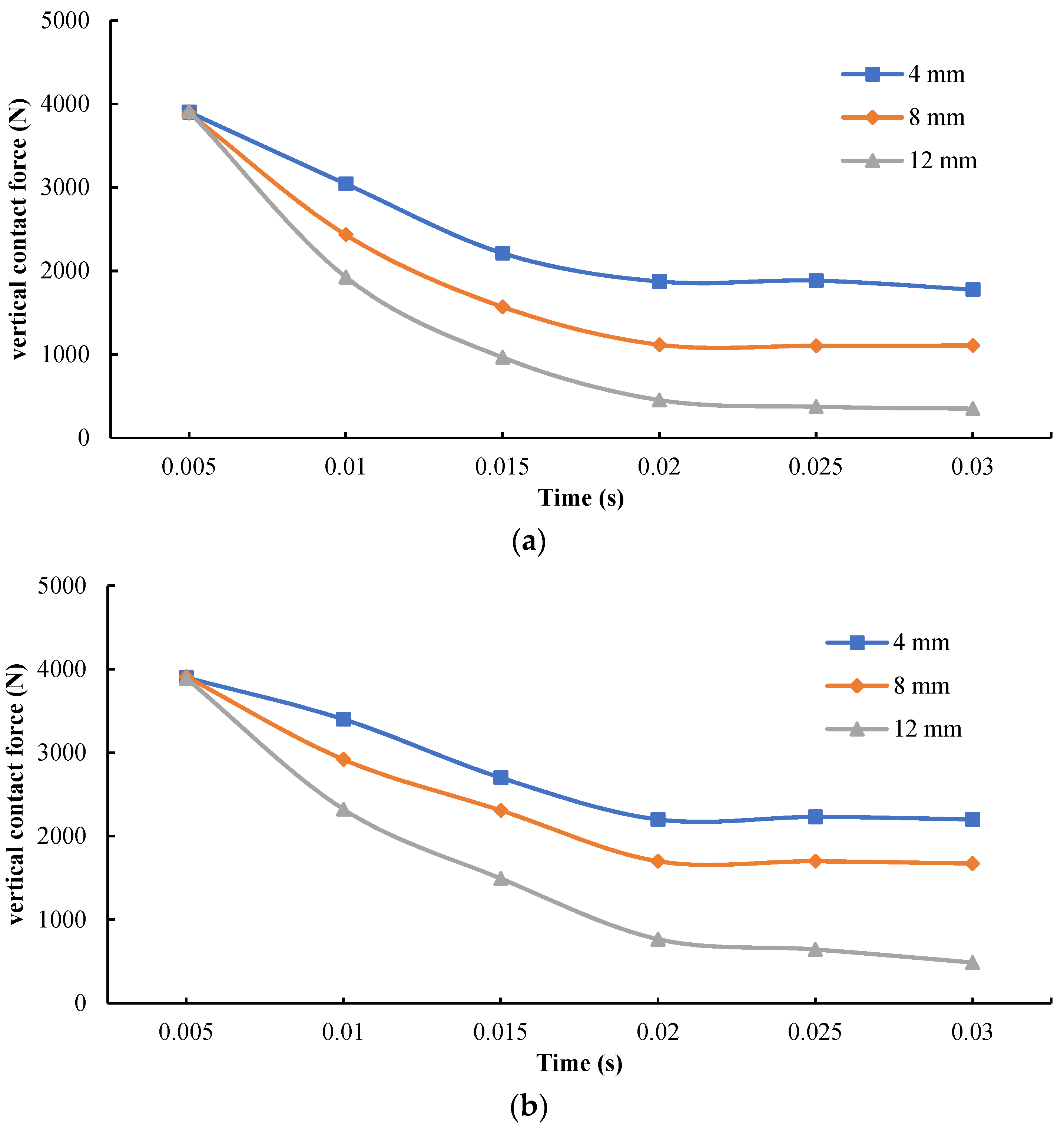
3.3. Effects of the Thickness of Water Film on Partial Aquaplane Performance
4. Conclusions and Future Research
- (1)
- Tire–pavement frictional force distribution is closely related to pavement texture characteristics. The frictional force distribution between the tire and AC, which has a flat surface, is relatively uniform, but the friction forces on SMA and OGFC, with relatively rough surfaces, are mainly concentrated in the protruding aggregate particles. This conclusion also provides evidence for the perception that rough surfaces usually tend to have greater friction than smooth ones.
- (2)
- Under the free rolling state, the tire–pavement dynamic friction coefficient decreases with the increase of tire pressure. Specifically, the tire–pavement dynamic friction coefficients on OGFC and SMA decrease more than that on AC. Under the braking state, the tire–pavement dynamic friction coefficient is positively related with a tire pressure. Moreover, whether under a free rolling state or under a braking state, the friction coefficient always increases with the increase of loads.
- (3)
- Under the partial aquaplane state, due to the influence of the support force provided by the water flow, the vertical contact force between the tire and the pavement is significantly reduced. Finally, the tire reaches the stress balance state under the collaborative effect of the lifting force of the water flow and support force of the pavement. Under equal conditions, the vertical contact force between the OGFC and tire is the highest when the tire reaches the stress balance state, followed by that between SMA and the tire. In contrast, the vertical contact force between AC and the tire is the smallest. Moreover, the tire–pavement vertical contact force decreases more significantly under the partial aquaplane state when the velocity of tire speed or thickness of the water film increases.
- (1)
- Tire–pavement frictional characteristics on the wet pavement should be further investigated, in combination with the coupled factor of temperature variation.
- (2)
- Friction coefficient threshold on tire partial aquaplane conditions should be considered with the vehicle crash rates, in order to facilitate the traffic safety research. Moreover, the suggested vehicle speed should also be given on various wet conditions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yu, M.; Xiao, B.; You, Z.; Wu, G.; Li, X.; Ding, Y. Dynamic friction coefficient between tire and compacted asphalt mixtures using tire-pavement dynamic friction analyzer. Constr. Build. Mater. 2020, 258, 119492. [Google Scholar] [CrossRef]
- Chowdhury, A.; Kassem, E.; Aldagari, S.; Masad, E. Validation of Asphalt Mixture Pavement Skid Prediction Model and Development of Skid Prediction Model for Surface Treatments; Report 0-6746-01-1; Texas Department of Transportation, Research and Technology Implementation Office: Austin, TX, USA, 2017.
- Lu, J.; Pan, B.; Liu, Q.; Sun, M.; Liu, P.; Oeser, M. A novel noncontact method for the pavement skid resistance evaluation based on surface texture. Tribol. Int. 2022, 165, 107311. [Google Scholar] [CrossRef]
- Saghafi, M.; Abdallah, I.N.; Nazarian, S. Practical Specimen Preparation and Testing Protocol for Evaluation of Friction Performance of Asphalt Pavement Aggregates with Three-Wheel Polishing Device. J. Mater. Civ. Eng. 2022, 34, 04021397. [Google Scholar] [CrossRef]
- Shahriar, N.; Gerardo, W. Flintsch & Alejandra MedinaLinking roadway crashes and tire–pavement friction: A case study. Int. J. Pavement Eng. 2017, 18, 119–127. [Google Scholar]
- Hofko, B.; Kugler, H.; Chankov, G.; Spielhofer, R. Correlating Field and Lab Measurements of Skid Resistance by Skiddometer and Wehner/Schulze Device. In Proceedings of the Annual Meeting of Transportation Research Board, Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Arce, O.D.G.; Zhang, Z. Skid resistance deterioration model at the network level using Markov chains. Int. J. Pavement Eng. 2019, 22, 118–126. [Google Scholar] [CrossRef]
- McCarthy, R.; Flintsch, G.; de León Izeppi, E. Impact of Skid Resistance on Dry and Wet Weather Crashes. J. Transp. Eng. Part B Pavements. 2021, 147, 04021029. [Google Scholar] [CrossRef]
- Maia, R.S.; Costa, S.L.; Cunto, F.J.C.; Branco, V.T.F.C. Relating Weather Conditions, Drivers’ Behavior, and Tire-Pavement Friction to the Analysis of Microscopic Simulated Vehicular Conflicts. J. Transp. Eng. Part B Pavements 2021, 147, 04021037. [Google Scholar] [CrossRef]
- Liu, C.; Qian, Z.; Liao, Y.; Ren, H. A Comprehensive Life-Cycle Cost Analysis Approach Developed for Steel Bridge Deck Pavement Schemes. Coatings 2021, 11, 565. [Google Scholar] [CrossRef]
- Tang, F.; Fu, X.; Cai, M.; Lu, Y.; Zhong, S. Investigation of the Factors Influencing the Crash Frequency in Expressway Tunnels: Considering Excess Zero Observations and Unobserved Heterogeneity. IEEE Access 2021, 9, 58549–58565. [Google Scholar] [CrossRef]
- Ong, G.P.; Fwa, T. Modeling Skid Resistance of Commercial Trucks on Highways. J. Transp. Eng. 2010, 7, 510–517. [Google Scholar] [CrossRef]
- Tang, T.; Anupam, K.; Kasbergen, C.; Scarpas, A.; Erkens, S. A finite element study of rain intensity on skid resistance for permeable asphalt concrete mixes. Constr. Build. Mater. 2019, 220, 464–475. [Google Scholar] [CrossRef]
- Anupam, K.; Tang, T.; Kasbergen, C.; Scarpas, A.; Erkens, S. 3-D Thermomechanical Tire–Pavement Interaction Model for Evaluation of Pavement Skid Resistance. Transp. Res. Rec. 2021, 2675, 65–80. [Google Scholar] [CrossRef]
- Feng, X. Research on simulation technology of tire hydroplaning Performance. In Proceedings of the 19th Annual Conference of Beijing Strength Society, Beijing Mechanics Association, Beijing, China; 2013; Volume 2. [Google Scholar]
- Zhu, S. Numerical Simulation of Tire Skid Resistance Based on Pavement Macro Texture. Ph.D. Thesis, Southeast University, Nanjing, China, 2017. [Google Scholar]
- Zhu, X.; Pang, Y.; Yang, J.; Zhao, H. Numerical analysis of hydroplaning behavior by using a tire-water-film-runway model. Int. J. Pavement Eng. 2020, 23, 784–800. [Google Scholar] [CrossRef]
- Yu, M.; You, Z.; Wu, G.; Kong, L.; Liu, C.; Gao, J. Measurement and modeling of skid resistance of asphalt pavement: A review. Constr. Build. Mater. 2020, 260, 119878. [Google Scholar] [CrossRef]
- Varveri, A.; Avgerinopoulos, S.; Kasbergen, C.; Scarpas, A.; Collop, A. The Influence of Air Void Content on Moisture Damage Susceptibility of Asphalt Mixtures: A Computational Study. In Proceedings of the Annual Meeting of Transportation Research Board, Washington, DC, USA, 12–16 January 2014. [Google Scholar]
- Tang, T.; Anupam, K.; Kasbergen, C.; Kogbara, R.; Scarpas, A.; Masad, E. Finite Element Studies of Skid Resistance under Hot Weather Condition. Transp. Res. Rec. 2018, 2672, 382–394. [Google Scholar] [CrossRef] [Green Version]
- Yu, M.; Wu, G.; Kong, L.; Tang, Y. Tire-Pavement Friction Characteristics with Elastic Properties of Asphalt Pavements. Appl. Sci. 2017, 7, 1123. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Liu, X.; Cao, Q.; Yan, T.; Zhu, S.; Zhou, X. Numerical simulation of tire partial hydroplaning on flood pavement. J. Hunan Univ. (Nat. Sci.) 2018, 45, 113–121. [Google Scholar]
- Ji, T.; Huan, X.; Liu, Q. Part hydroplaning effect on pavement friction coefficient. J. Transp. Eng. 2003, 3, 10–12. [Google Scholar]
- Yan, Z. Simulation Study of tire Braking Performance on Wet Roads. Bachelor’s Thesis, Jilin University, Jilin, China, 2017. [Google Scholar]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Initial Density (ton/mm3) | Dynamic Viscosity (N·s/mm2) | co (mm/s) | s | |
|---|---|---|---|---|
| 1.0 × 10−9 | 8.9 × 10−10 | 1.5 × 106 | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, M.; Kong, Y.; You, Z.; Li, J.; Yang, L.; Kong, L. Anti-Skid Characteristics of Asphalt Pavement Based on Partial Tire Aquaplane Conditions. Materials 2022, 15, 4976. https://doi.org/10.3390/ma15144976
Yu M, Kong Y, You Z, Li J, Yang L, Kong L. Anti-Skid Characteristics of Asphalt Pavement Based on Partial Tire Aquaplane Conditions. Materials. 2022; 15(14):4976. https://doi.org/10.3390/ma15144976
Chicago/Turabian StyleYu, Miao, Yao Kong, Zhanping You, Jue Li, Liming Yang, and Lingyun Kong. 2022. "Anti-Skid Characteristics of Asphalt Pavement Based on Partial Tire Aquaplane Conditions" Materials 15, no. 14: 4976. https://doi.org/10.3390/ma15144976